Изобретение относится к точному приборостроению, а именно к созданию систем ориентации и навигации летательного аппарата, построенных по бесплатформенным схемам.
Известен вариант блока чувствительных элементов навигационной бесплатформенной навигационной системы, содержащий шесть акселерометров, жестко закрепленных на корпусе и разнесенных относительно центра масс летательного аппарата в виде двух базовых триэдров (Косыпов О.Э. Лекция №22, Инерциальные навигационные системы, физические принципы инерциальной навигации. Московский авиационный институт, 2012, стр. 16-18. Доступ: https://olegkop.ucoz.com/InfIzmYstr/lekcija_22.pdf).
Однако в аналоге составлены дифференциальные уравнения инерциальной навигационной системы, но не указано какими техническими средствами и по каким алгоритмам реализуется определение проекций линейных ускорений центра масс и проекций угловых скоростей относительно центра масс летательного аппарата.
Известен вариант блока чувствительных элементов, взятый за прототип, содержащий шесть линейных акселерометров, попарно разнесенных на определенные расстояния относительно центра масс летательного аппарата по трем ортогональным осям летательного аппарата (Захарин М.И., Захарин Ф.М. Кинематика инерциальных систем навигации. М.: Машиностроение, 1968, стр. 173).
Однако в прототипе не указано, какими техническими средствами реализуются алгоритмы определения проекций линейных ускорений центра масс и проекций угловых скоростей относительно центра масс летательного аппарата, которые могут использоваться как для построения бесплатформенных систем ориентации, так и навигации.
Технический результат, на достижение которого направлено изобретение, заключается в расширении функциональных возможностей блока чувствительных элементов, построенного на базе шести акселерометров.
Технический результат достигается тем, что в блоке чувствительных элементов, состоящем из шести акселерометров, центры масс которых размещены попарно и симметрично на определенном расстоянии относительно центра масс летательного аппарата, а оси чувствительности ориентированными по его ортогональным строительным осям, новым является то, что оси чувствительности акселерометров дополнительно ориентированы перпендикулярно центростремительным ускорениям, при этом выходы первого и второго акселерометров подключены к первому и второму входам первого суммирующего усилителя и первого вычитающего усилителя соответственно, выходы третьего и четвертого акселерометров подключены к первому и второму входам второго суммирующего усилителя и второго вычитающего усилителя соответственно, выходы пятого и шестого акселерометров подключены к первому и второму входам третьего суммирующего усилителя и третьего вычитающего усилителя соответственно, а выходы первого-третьего суммирующих усилителей соединены с входами первого-третьего блоков масштабирования соответственно, выходы первого-третьего вычитающих усилителей подключены на входы первого-третьего блоков интегрирования, выходы которых подключены на входы четвертого-шестого блоков масштабирования.
Существо изобретения поясняется чертежами, приведенными на фиг.1 и фиг.2.
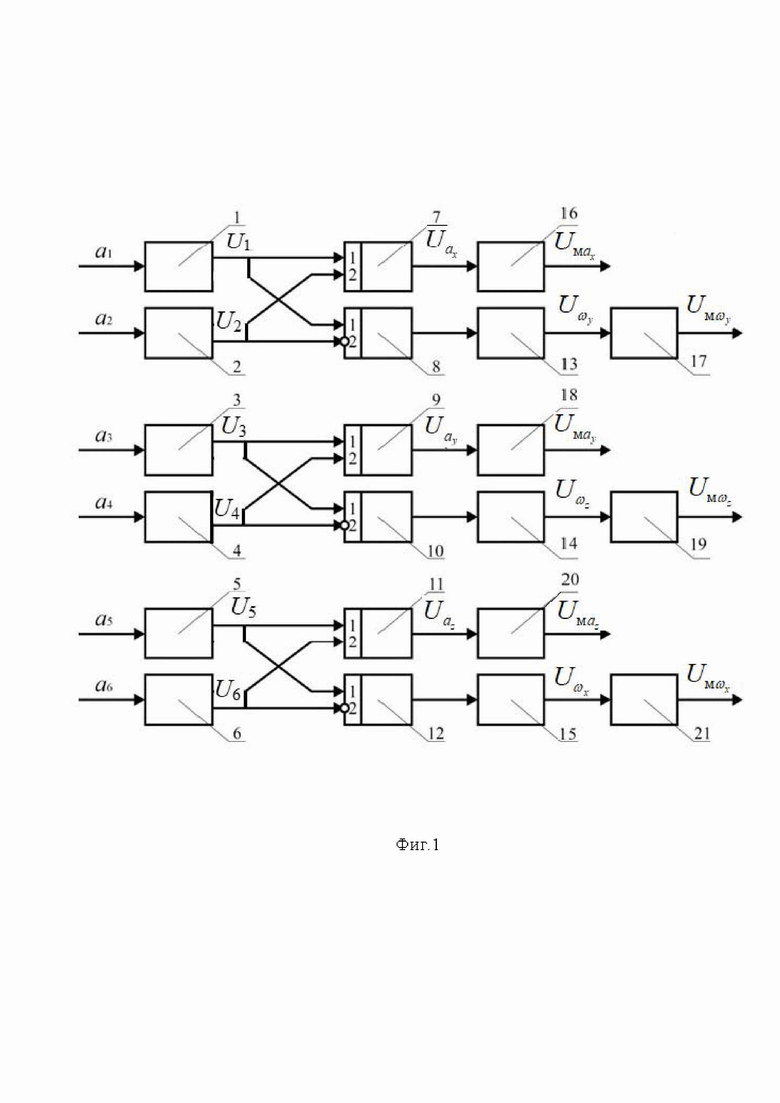
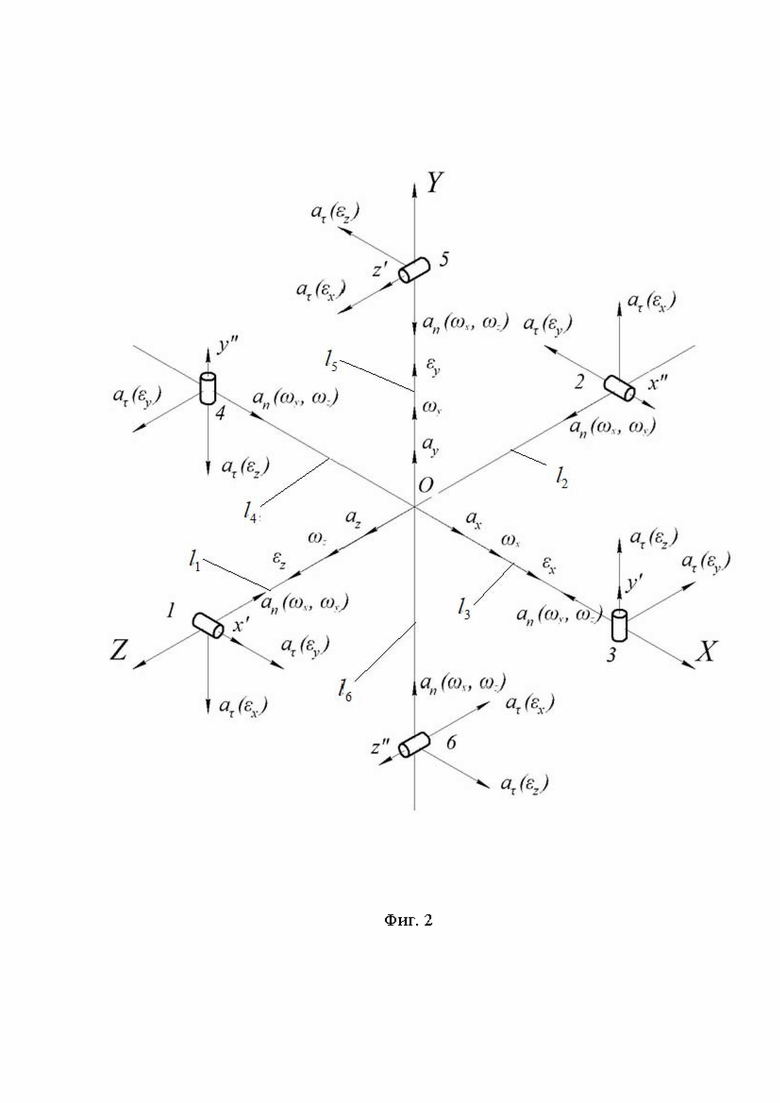
На фиг.1 приведена структурная схема блока чувствительных элементов, а на фиг. 2 приведена схема расположения шести акселерометров относительно центра масс и строительных осей самолета.
На фиг.1 и фиг. 2 приняты следующие обозначения:
1 – первый акселерометр, центр масс которого расположен на поперечной оси, а ось чувствительности направлена вдоль продольной оси летательного аппарата;
2 – второй акселерометр, центр масс которого расположен на поперечной оси симметрично относительно первого акселерометра, а ось чувствительности направлена вдоль продольной оси летательного аппарата;
3 – третий акселерометр, центр масс которого расположен на продольной оси, а ось чувствительности направлена вдоль нормальной оси летательного аппарата;
4 – четвертый акселерометр, центр масс которого расположен на продольной оси симметрично относительно третьего акселерометра, а ось чувствительности направлена вдоль нормальной оси летательного аппарата;
5 – пятый акселерометр, центр масс которого расположен на нормальной оси, а ось чувствительности направлена вдоль поперечной оси летательного аппарата;
6 – шестой акселерометр, центр масс которого расположен на нормальной оси симметрично относительно пятого акселерометра, а ось чувствительности направлена вдоль поперечной оси летательного аппарата;
7, 9, 11 – первый, второй и третий суммирующие усилители соответственно;
8, 10, 12 – первый, второй и третий вычитающие усилители соответственно;
13–15 – первый, второй, третий блоки интегрирования;
16–21 – первый, второй, третий, четвертый, пятый и шестой блоки масштабирования соответственно.
Кроме цифровых обозначений применены следующие буквенные обозначения:
 - продольная ось летательного аппарата;
- продольная ось летательного аппарата;
 - нормальная ось летательного аппарата;
- нормальная ось летательного аппарата;
 – поперечная ось летательного аппарата;
– поперечная ось летательного аппарата;
 оси чувствительности акселерометров 1 и 2 соответственно;
оси чувствительности акселерометров 1 и 2 соответственно;
 оси чувствительности акселерометров 3 и 4 соответственно;
оси чувствительности акселерометров 3 и 4 соответственно;
 оси чувствительности акселерометров 5 и 6 соответственно;
оси чувствительности акселерометров 5 и 6 соответственно;
 – проекция ускорения центра масс летательного аппарата на продольную ось;
– проекция ускорения центра масс летательного аппарата на продольную ось;
 – проекция ускорения центра масс летательного аппарата на нормальную ось;
– проекция ускорения центра масс летательного аппарата на нормальную ось;
 – проекция ускорения центра масс летательного аппарата на поперечную ось;
– проекция ускорения центра масс летательного аппарата на поперечную ось;
 – проекция углового ускорения относительно центра масс летательного аппарата на продольную ось;
– проекция углового ускорения относительно центра масс летательного аппарата на продольную ось;
 – проекция углового ускорения относительно центра масс летательного аппарата на нормальную ось;
– проекция углового ускорения относительно центра масс летательного аппарата на нормальную ось;
 – проекция углового ускорения относительно центра масс летательного аппарата на поперечную ось;
– проекция углового ускорения относительно центра масс летательного аппарата на поперечную ось;
 – тангенциальное ускорение, вызванное проекцией углового ускорения относительно центра масс летательного аппарата на продольную ось;
– тангенциальное ускорение, вызванное проекцией углового ускорения относительно центра масс летательного аппарата на продольную ось;
 – тангенциальное ускорение, вызванное проекцией углового ускорения относительно центра масс летательного аппарата на нормальную ось;
– тангенциальное ускорение, вызванное проекцией углового ускорения относительно центра масс летательного аппарата на нормальную ось;
 – тангенциальное ускорение, вызванное проекцией углового ускорения относительно центра масс летательного аппарата на поперечную ось;
– тангенциальное ускорение, вызванное проекцией углового ускорения относительно центра масс летательного аппарата на поперечную ось;
 входные ускорения, измеряемые первым – шестым акселерометрами соответственно;
входные ускорения, измеряемые первым – шестым акселерометрами соответственно;
с – проекция угловой скорости относительно центра масс летательного аппарата на продольную ось;
 – проекция угловой скорости относительно центра масс летательного аппарата на нормальную ось;
– проекция угловой скорости относительно центра масс летательного аппарата на нормальную ось;
 – проекция угловой скорости относительно центра масс летательного аппарата на поперечную ось;
– проекция угловой скорости относительно центра масс летательного аппарата на поперечную ось;
 – центростремительное ускорение, вызванное проекциями угловой скорости относительно центра масс летательного аппарата по продольной и нормальной осям;
– центростремительное ускорение, вызванное проекциями угловой скорости относительно центра масс летательного аппарата по продольной и нормальной осям;
 – центростремительное ускорение, вызванное проекциями угловой скорости относительно центра масс летательного аппарата по нормальной и поперечной осям;
– центростремительное ускорение, вызванное проекциями угловой скорости относительно центра масс летательного аппарата по нормальной и поперечной осям;
 – центростремительное ускорение, вызванное проекциями угловой скорости относительно центра масс летательного аппарата по продольной и поперечной осям;
– центростремительное ускорение, вызванное проекциями угловой скорости относительно центра масс летательного аппарата по продольной и поперечной осям;
 расстояния от центра масс акселерометров 1-6 до центра масс летательного аппарата;
расстояния от центра масс акселерометров 1-6 до центра масс летательного аппарата;
 выходные сигналы акселерометров с 1 по 6;
выходные сигналы акселерометров с 1 по 6;
 выходные сигналы суммирующих усилителей 7, 9 и 11;
выходные сигналы суммирующих усилителей 7, 9 и 11;
 выходные сигналы блоков интегрирования 13, 14 и 15;
выходные сигналы блоков интегрирования 13, 14 и 15;
 выходные сигналы блоков масштабирования 16, 18 и 20;
выходные сигналы блоков масштабирования 16, 18 и 20;
 выходные сигналы блоков интегрирования 21, 17 и 19.
выходные сигналы блоков интегрирования 21, 17 и 19.
Блок чувствительных элементов состоит из шести акселерометров 1-6 попарно и симметрично закрепленных на корпусе летательного аппарата, при этом, не уменьшая общности, можно принять, что  , а оси чувствительности ориентированы таким образом, чтобы центростремительные (нормальные) ускорения
, а оси чувствительности ориентированы таким образом, чтобы центростремительные (нормальные) ускорения  ,
,  ,
,  были перпендикулярны соответствующим осям чувствительности акселерометров, т.е. чтобы не измерялись. Сигналы с акселерометров 1-2, 3-4, 5-6, расположенных на одной из осей
были перпендикулярны соответствующим осям чувствительности акселерометров, т.е. чтобы не измерялись. Сигналы с акселерометров 1-2, 3-4, 5-6, расположенных на одной из осей  , поступают одновременно на суммирующие усилители 7, 9, 11 и соответственно на вычитающие усилители 8, 10,12. Выходы суммирующих усилителей соединены с блоками масштабирования, 16, 18, 20, на которых в определенном масштабе формируются сигналы пропорциональные линейным ускорениям
, поступают одновременно на суммирующие усилители 7, 9, 11 и соответственно на вычитающие усилители 8, 10,12. Выходы суммирующих усилителей соединены с блоками масштабирования, 16, 18, 20, на которых в определенном масштабе формируются сигналы пропорциональные линейным ускорениям  центра масс летательного аппарата. Выходы вычитающих усилителей 8, 10,12 соединены соответственно с блоками интегрирования 13, 14, 15, выходы которых подключены на входы блоков масштабирования 17, 19, 21, на которых в определенном масштабе формируются сигналы пропорциональные угловым скоростям
центра масс летательного аппарата. Выходы вычитающих усилителей 8, 10,12 соединены соответственно с блоками интегрирования 13, 14, 15, выходы которых подключены на входы блоков масштабирования 17, 19, 21, на которых в определенном масштабе формируются сигналы пропорциональные угловым скоростям  относительно центра масс летательного аппарата.
относительно центра масс летательного аппарата.
Формирование инерциальной информации.
В соответствии с фиг. 2 выходной сигнал акселерометра 1 U1 равен сумме проекции линейного ускорения центра масс по продольной оси OX ax и тангенциального ускорения, вызванного проекцией углового ускорения относительно центра масс по нормальной оси OY  , помноженной на коэффициент крутизны акселерометра ka; выходной сигнал акселерометра 2 U2 равен разности проекции линейного ускорения центра масс по продольной оси OX ax и тангенциального ускорения, вызванного проекцией углового ускорения относительно центра масс по нормальной оси OY
, помноженной на коэффициент крутизны акселерометра ka; выходной сигнал акселерометра 2 U2 равен разности проекции линейного ускорения центра масс по продольной оси OX ax и тангенциального ускорения, вызванного проекцией углового ускорения относительно центра масс по нормальной оси OY  помноженной на коэффициент крутизны акселерометра ka; выходной сигнал акселерометра 3 U3 равен сумме проекции линейного ускорения центра масс по нормальной оси OY ay и тангенциального ускорения, вызванного проекцией углового ускорения относительно центра масс по поперечной оси OZ
помноженной на коэффициент крутизны акселерометра ka; выходной сигнал акселерометра 3 U3 равен сумме проекции линейного ускорения центра масс по нормальной оси OY ay и тангенциального ускорения, вызванного проекцией углового ускорения относительно центра масс по поперечной оси OZ  помноженной на коэффициент крутизны акселерометра ka; выходной сигнал акселерометра 4 U4 равен разности проекции линейного ускорения центра масс по нормальной оси OY ay и тангенциального ускорения, вызванного проекцией углового ускорения относительно центра масс по поперечной оси OZ помноженной на коэффициент крутизны акселерометра ka; выходной сигнал акселерометра 5 U5 равен сумме проекции линейного ускорения центра масс по поперечной оси OZ az и тангенциального ускорения, вызванного проекцией углового ускорения относительно центра масс по продольной оси OX
помноженной на коэффициент крутизны акселерометра ka; выходной сигнал акселерометра 4 U4 равен разности проекции линейного ускорения центра масс по нормальной оси OY ay и тангенциального ускорения, вызванного проекцией углового ускорения относительно центра масс по поперечной оси OZ помноженной на коэффициент крутизны акселерометра ka; выходной сигнал акселерометра 5 U5 равен сумме проекции линейного ускорения центра масс по поперечной оси OZ az и тангенциального ускорения, вызванного проекцией углового ускорения относительно центра масс по продольной оси OX  помноженной на коэффициент крутизны акселерометра ka; выходной сигнал акселерометра 6 U6 равен разности проекции линейного ускорения центра масс по поперечной оси OZ az и тангенциального ускорения, вызванного проекцией углового ускорения относительно центра масс по продольной оси OX
помноженной на коэффициент крутизны акселерометра ka; выходной сигнал акселерометра 6 U6 равен разности проекции линейного ускорения центра масс по поперечной оси OZ az и тангенциального ускорения, вызванного проекцией углового ускорения относительно центра масс по продольной оси OX  , помноженной на коэффициент крутизны акселерометра ka
, помноженной на коэффициент крутизны акселерометра ka
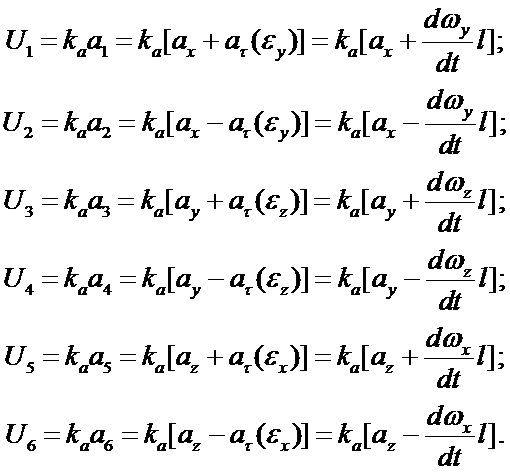 (1)
(1)
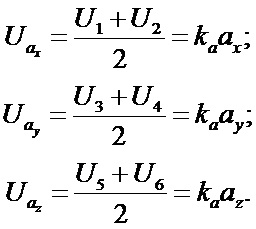
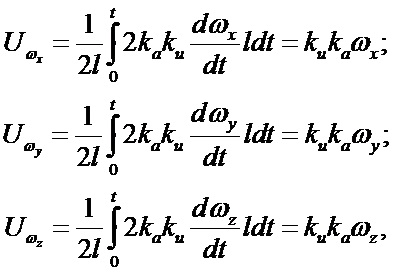
В соответствии с формулами (1) напряжение  , пропорциональное линейному ускорению центра масс по продольной оси OX равно сумме сигналов U1 и U2 акселерометров 1 и 2, поделенных на два; напряжение
, пропорциональное линейному ускорению центра масс по продольной оси OX равно сумме сигналов U1 и U2 акселерометров 1 и 2, поделенных на два; напряжение  , пропорциональное линейному ускорению центра масс по нормальной оси OY равно сумме сигналов U3 и U4 акселерометров 3 и 4, поделенных на два; напряжение
, пропорциональное линейному ускорению центра масс по нормальной оси OY равно сумме сигналов U3 и U4 акселерометров 3 и 4, поделенных на два; напряжение  , пропорциональное линейному ускорению центра масс по поперечной оси OZ равно сумме сигналов U5 и U6 акселерометров 5 и 6, поделенных на два
, пропорциональное линейному ускорению центра масс по поперечной оси OZ равно сумме сигналов U5 и U6 акселерометров 5 и 6, поделенных на два
Напряжение  , пропорциональное проекции угловой скорости относительно центра масс по продольной оси OX равно интегралу разности сигналов U5 и U6 акселерометров 5 и 6, поделенных на два и расстояние от центра масс до осей чувствительности акселерометров l; напряжение
, пропорциональное проекции угловой скорости относительно центра масс по продольной оси OX равно интегралу разности сигналов U5 и U6 акселерометров 5 и 6, поделенных на два и расстояние от центра масс до осей чувствительности акселерометров l; напряжение  , пропорциональное угловой скорости относительно центра масс по нормальной оси OY равно интегралу разности сигналов U1 и U2 акселерометров 1 и 2, поделенных на два и расстояние от центра масс до осей чувствительности акселерометров l; напряжение
, пропорциональное угловой скорости относительно центра масс по нормальной оси OY равно интегралу разности сигналов U1 и U2 акселерометров 1 и 2, поделенных на два и расстояние от центра масс до осей чувствительности акселерометров l; напряжение  , пропорциональное угловой скорости относительно центра масс по поперечной оси OZ равно интегралу разности сигналов U3 и U4 акселерометров 3 и 4, поделенных на два и расстояние от центра масс до осей чувствительности акселерометров l
, пропорциональное угловой скорости относительно центра масс по поперечной оси OZ равно интегралу разности сигналов U3 и U4 акселерометров 3 и 4, поделенных на два и расстояние от центра масс до осей чувствительности акселерометров l
где  коэффициент передачи блоков интегрирования.
коэффициент передачи блоков интегрирования.
Для использования в конкретных системах сигналы суммирующих усилителей 7, 9 и 11, а также блоков интегрирования 13, 14 и 15 масштабируются в блоках 16-21 соответственно


где  масштабный коэффициент.
масштабный коэффициент.
Для технической реализация блока чувствительных элементов в аналоговом исполнении можно в качестве измерителей линейных ускорений применить, например, акселерометры А-15, суммирующие и вычитающие усилители, а также блоки интегрирования и масштабирования можно построить на операционных усилителях, например, серии К140УД17.
Однако, так как в схеме присутствуют блоки интегрирования, то это накладывает ограничение на время полета летательного аппарата.
Предлагаемое устройство может быть применено при создании бесплатформенных систем ориентации и навигации беспилотных летательных аппаратов самолетной схемы с ограниченным временем полета.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ формирования инерциальной информации | 2024 |
|
RU2827679C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ВЕЛИЧИНЫ И НАПРАВЛЕНИЯ СМЕЩЕНИЯ ЦЕНТРА МАСС АППАРАТА | 2000 |
|
RU2176810C2 |
| СПОСОБ И УСТРОЙСТВО КОНТРОЛЯ ГОРИЗОНТАЛЬНОЙ ОРИЕНТАЦИИ АППАРАТА | 2007 |
|
RU2373562C2 |
| Способ определения центра масс летательного аппарата и устройство для его осуществления | 2016 |
|
RU2645018C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ЦЕНТРА МАСС ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2564375C1 |
| СПОСОБ И УСТРОЙСТВО КОНТРОЛЯ ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2012 |
|
RU2502050C1 |
| УСТРОЙСТВО КОМПЛЕКСНОГО КОНТРОЛЯ ИНЕРЦИАЛЬНОЙ СИСТЕМЫ | 2014 |
|
RU2546076C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ДАТЧИКОВ СИСТЕМЫ УПРАВЛЕНИЯ ПОДВИЖНОГО АППАРАТА | 2012 |
|
RU2493578C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ УГЛОВОЙ ОРИЕНТАЦИИ САМОЛЕТА | 2003 |
|
RU2240507C1 |
| УСТРОЙСТВО КОНТРОЛЯ ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2013 |
|
RU2536365C1 |
Изобретение относится к созданию систем ориентации и навигации летательных аппаратов (ЛА). Центры масс шести акселерометров заявленного блока размещены попарно и симметрично на определенном расстоянии относительно центра масс ЛА, а оси чувствительности ориентированы по его ортогональным строительным осям и перпендикулярны соответствующим центростремительным ускорениям. При этом выходы первого и второго акселерометров подключены к первому и второму входам первого суммирующего усилителя и первого вычитающего усилителя соответственно, выходы третьего и четвертого акселерометров подключены к первому и второму входам второго суммирующего усилителя и второго вычитающего усилителя соответственно, выходы пятого и шестого акселерометров подключены к первому и второму входам третьего суммирующего усилителя и третьего вычитающего усилителя соответственно, а выходы первого-третьего суммирующих усилителей соединены с входами первого-третьего блоков масштабирования соответственно, выходы первого-третьего вычитающих усилителей подключены на входы первого-третьего блоков интегрирования, выходы которых подключены на входы четвертого-шестого блоков масштабирования. Технический результат изобретения заключается в расширении функциональных возможностей. 2 ил.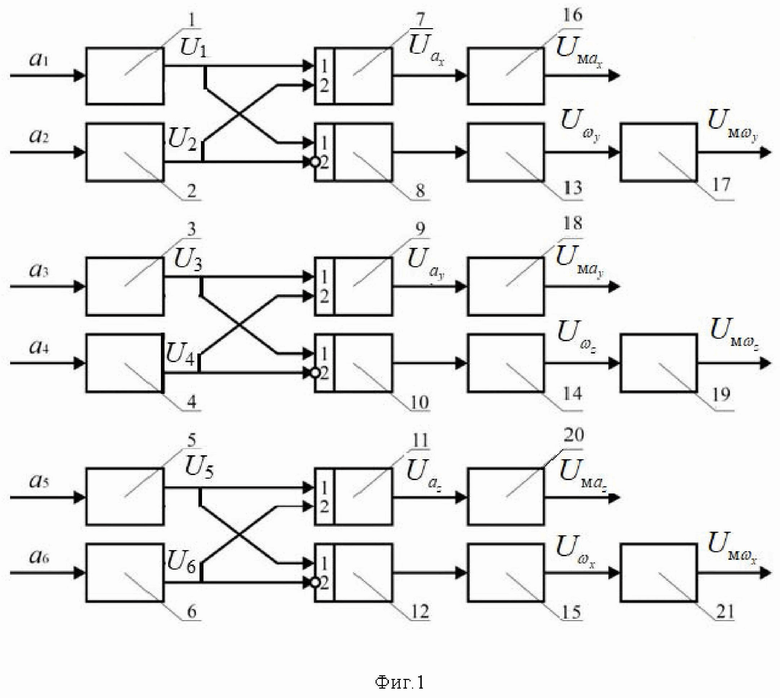
Блок чувствительных элементов, состоящий из шести акселерометров, центры масс которых размещены попарно и симметрично на определенном расстоянии относительно центра масс летательного аппарата, а оси чувствительности ориентированы по его ортогональным строительным осям, отличающийся тем, что оси чувствительности акселерометров дополнительно ориентированы перпендикулярно центростремительным ускорениям, при этом выходы первого и второго акселерометров подключены к первому и второму входам первого суммирующего усилителя и первого вычитающего усилителя соответственно, выходы третьего и четвертого акселерометров подключены к первому и второму входам второго суммирующего усилителя и второго вычитающего усилителя соответственно, выходы пятого и шестого акселерометров подключены к первому и второму входам третьего суммирующего усилителя и третьего вычитающего усилителя соответственно, а выходы первого-третьего суммирующих усилителей соединены с входами первого-третьего блоков масштабирования соответственно, выходы первого-третьего вычитающих усилителей подключены на входы первого-третьего блоков интегрирования, выходы которых подключены на входы четвертого-шестого блоков масштабирования.
| ТРЕХОСНЫЙ МИКРОМЕХАНИЧЕСКИЙ БЛОК ЧУВСТВИТЕЛЬНЫХ ЭЛЕМЕНТОВ | 2016 |
|
RU2639285C1 |
| Способ включения поляризованного линейного реле в цепи взаимоизбирательной автоматической связи | 1955 |
|
SU101814A1 |
| ИНЕРЦИАЛЬНЫЙ ИЗМЕРИТЕЛЬНЫЙ ПРИБОР | 2005 |
|
RU2295113C2 |
| DE 60236662 D1, 22.07.2010 | |||
| US 5363700 A1, 15.11.1994. | |||

