Изобретение относится к точному приборостроению, а именно к навигационной технике, и может быть использовано для формирования инерциальной информации в виде линейных ускорений центра масс и угловых скоростей относительно центра масс летательного аппарата.
Известен способ, реализованный в бесплатформенной инерциальной навигационной системе, в котором измеряют проекции ускорений шестью акселерометрами, жестко закрепленных на корпусе и разнесенных относительно центра масс летательного аппарата в виде двух базовых триэдров и используют их сигналы для решения системы дифференциальных уравнений инерциальной навигации (Косыпов О.Э. Лекция №22, Инерциальные навигационные системы, физические принципы инерциальной навигации. Московский авиационный институт, 2012, стр. 16-18. Доступ: https://olegkop.ucoz.com/InfIzmYstr/lekcija_22.pdf).
Однако в аналоге приведены только системы дифференциальных уравнения инерциальной навигации, но не указана последовательность операций, по которым формируют проекции линейных ускорений центра масс и проекций угловых скоростей относительно центра масс летательного аппарата.
Известен также способ, реализованный в блоке чувствительных элементов, взятый за прототип, в котором измеряют линейные ускорения шестью акселерометрами, попарно разнесенных на равные расстояния относительно центра масс летательного аппарата по трем ортогональным строительным осям (Захарин М.И., Захарин Ф.М. Кинематика инерциальных систем навигации. М.: Машиностроение, 1968, стр. 173).
Однако в прототипе не указано, какая последовательность операций приводит к формированию проекций линейных ускорений центра масс и проекций угловых скоростей относительно центра масс летательного аппарата.
Технический результат, на достижение которого направлено изобретение, состоит в формировании инерциальных параметров в виде проекций ускорений центра масс и проекций угловых скоростей относительно центра масс на основании измерения линейных ускорений шестью акселерометрами, которые устанавливают на корпусе летательного аппарата.
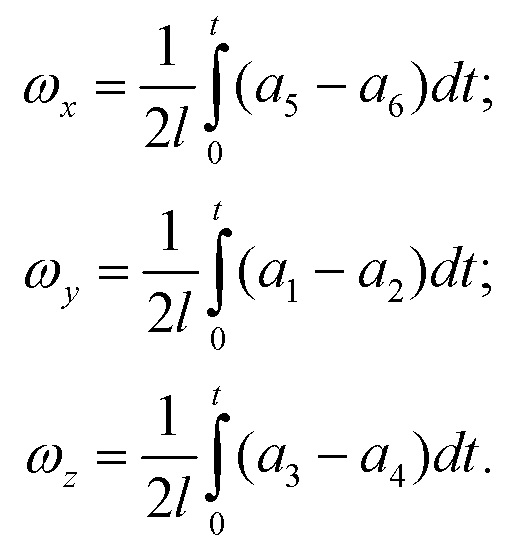
Технический результат достигается тем, что в способе формирования инерциальной информации, основанном на измерении линейных ускорений шестью акселерометрами, которые объединяют в пары и их центры масс располагают на строительных осях симметрично относительно центра масс летательного аппарата, а оси чувствительности каждой пары акселерометров ориентируют по строительным осям летательного аппарата, которые перпендикулярны новым является то, что оси чувствительности каждой пары акселерометров, расположенных на одной оси, ориентируют перпендикулярно соответствующим центростремительным ускорениям, а их сигналы одновременно складывают и вычитают, при этом сигналы после операции вычитания интегрируют и формируют инерциальные параметры в соответствии со следующими с формулами:


где ax, ay, az - проекции линейного ускорения центра масс летательного аппарата; ωx, ωy, ωz - проекции угловой скорости относительно центра масс летательного аппарата; a1, a2, a3, a4, a5, a6 - проекции ускорений на оси чувствительностей акселерометров;  расстояние от центра масс летательного аппарата до центра масс каждого акселерометра.
расстояние от центра масс летательного аппарата до центра масс каждого акселерометра.
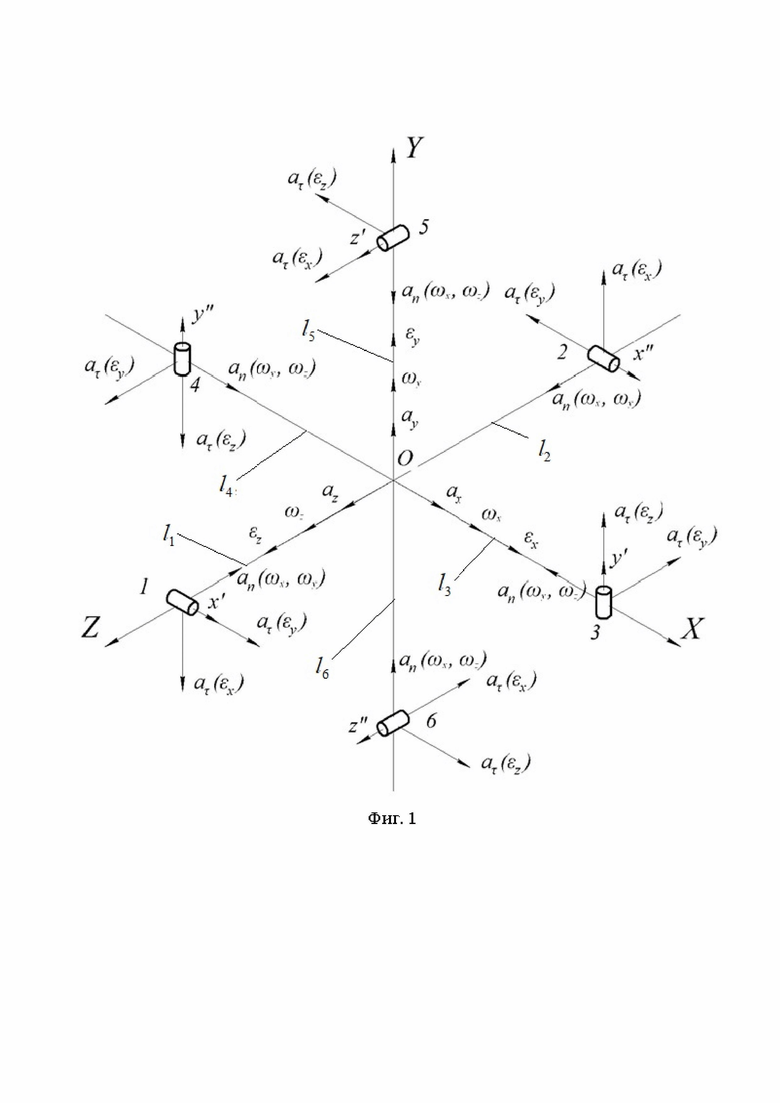
Существо изобретения поясняется чертежом, приведенным на фиг.1, на которой приведена кинематическая схема расположения акселерометров и на которой приняты следующие обозначения:
1 - первый акселерометр, центр масс которого располагают на поперечной оси  , а ось чувствительности направляют вдоль продольной оси летательного аппарата;
, а ось чувствительности направляют вдоль продольной оси летательного аппарата;
2 - второй акселерометр, центр масс которого располагают на поперечной оси  симметрично относительно первого акселерометра, а ось чувствительности направляют вдоль продольной оси летательного аппарата;
симметрично относительно первого акселерометра, а ось чувствительности направляют вдоль продольной оси летательного аппарата;
3 - третий акселерометр, центр масс которого располагают на продольной оси  , а ось чувствительности направляют вдоль нормальной оси летательного аппарата;
, а ось чувствительности направляют вдоль нормальной оси летательного аппарата;
4 - четвертый акселерометр, центр масс которого располагают на продольной оси  симметрично относительно третьего акселерометра, а ось чувствительности направляют вдоль нормальной оси летательного аппарата;
симметрично относительно третьего акселерометра, а ось чувствительности направляют вдоль нормальной оси летательного аппарата;
5 - пятый акселерометр, центр масс которого располагают на нормальной оси  , а ось чувствительности направляют вдоль поперечной оси летательного аппарата;
, а ось чувствительности направляют вдоль поперечной оси летательного аппарата;
6 - шестой акселерометр, центр масс которого располагают на нормальной оси  симметрично относительно пятого акселерометра, а ось чувствительности направлена вдоль поперечной оси летательного аппарата.
симметрично относительно пятого акселерометра, а ось чувствительности направлена вдоль поперечной оси летательного аппарата.
Кроме цифровых обозначений на фиг.1 применены следующие буквенные обозначения:
 – продольная ось летательного аппарата;
– продольная ось летательного аппарата;
 – нормальная ось летательного аппарата;
– нормальная ось летательного аппарата;
 – поперечная ось летательного аппарата;
– поперечная ось летательного аппарата;
 центр масс летательного аппарата;
центр масс летательного аппарата;
 оси чувствительности акселерометров 1 и 2 соответственно;
оси чувствительности акселерометров 1 и 2 соответственно;
 оси чувствительности акселерометров 3 и 4 соответственно;
оси чувствительности акселерометров 3 и 4 соответственно;
 оси чувствительности акселерометров 5 и 6 соответственно;
оси чувствительности акселерометров 5 и 6 соответственно;
 – проекция ускорения центра масс летательного аппарата на продольную ось;
– проекция ускорения центра масс летательного аппарата на продольную ось;
 – проекция ускорения центра масс летательного аппарата на нормальную ось;
– проекция ускорения центра масс летательного аппарата на нормальную ось;
 – проекция ускорения центра масс летательного аппарата на поперечную ось;
– проекция ускорения центра масс летательного аппарата на поперечную ось;
 – проекция углового ускорения относительно центра масс летательного аппарата на продольную ось;
– проекция углового ускорения относительно центра масс летательного аппарата на продольную ось;
 – проекция углового ускорения относительно центра масс летательного аппарата на нормальную ось;
– проекция углового ускорения относительно центра масс летательного аппарата на нормальную ось;
 – проекция углового ускорения относительно центра масс летательного аппарата на поперечную ось;
– проекция углового ускорения относительно центра масс летательного аппарата на поперечную ось;
 – тангенциальное ускорение, вызванное проекцией углового ускорения относительно центра масс летательного аппарата на продольную ось;
– тангенциальное ускорение, вызванное проекцией углового ускорения относительно центра масс летательного аппарата на продольную ось;
 – тангенциальное ускорение, вызванное проекцией углового ускорения относительно центра масс летательного аппарата на нормальную ось;
– тангенциальное ускорение, вызванное проекцией углового ускорения относительно центра масс летательного аппарата на нормальную ось;
 – тангенциальное ускорение, вызванное проекцией углового ускорения относительно центра масс летательного аппарата на поперечную ось;
– тангенциальное ускорение, вызванное проекцией углового ускорения относительно центра масс летательного аппарата на поперечную ось;
 входные ускорения, измеряемые первым - шестым акселерометрами соответственно;
входные ускорения, измеряемые первым - шестым акселерометрами соответственно;
 – проекция угловой скорости относительно центра масс летательного аппарата на продольную ось;
– проекция угловой скорости относительно центра масс летательного аппарата на продольную ось;
 – проекция угловой скорости относительно центра масс летательного аппарата на нормальную ось;
– проекция угловой скорости относительно центра масс летательного аппарата на нормальную ось;
 – проекция угловой скорости относительно центра масс летательного аппарата на поперечную ось;
– проекция угловой скорости относительно центра масс летательного аппарата на поперечную ось;
 – центростремительное ускорение, вызванное проекциями угловой скорости относительно центра масс летательного аппарата по продольной и нормальной осям;
– центростремительное ускорение, вызванное проекциями угловой скорости относительно центра масс летательного аппарата по продольной и нормальной осям;
 – центростремительное ускорение, вызванное проекциями угловой скорости относительно центра масс летательного аппарата по нормальной и поперечной осям;
– центростремительное ускорение, вызванное проекциями угловой скорости относительно центра масс летательного аппарата по нормальной и поперечной осям;
 – центростремительное ускорение, вызванное проекциями угловой скорости относительно центра масс летательного аппарата по продольной и поперечной осям;
– центростремительное ускорение, вызванное проекциями угловой скорости относительно центра масс летательного аппарата по продольной и поперечной осям;
 расстояния от центра масс акселерометров 1-6 до центра масс летательного аппарата.
расстояния от центра масс акселерометров 1-6 до центра масс летательного аппарата.
Основу формирования инерциальной информации составляют сигналы шести акселерометров 1-6, которые попарно и симметрично относительно центра масс летательного аппарата устанавливают на его корпусе. Не уменьшая общности, можно принять, что  , а оси чувствительности акселерометров ориентируют перпендикулярно центростремительным (нормальным) ускорениям
, а оси чувствительности акселерометров ориентируют перпендикулярно центростремительным (нормальным) ускорениям  ,
,  ,
,  , т.е. чтобы они не влияли на процесс измерения. При этом центры масс акселерометров 1 и 2 располагают на поперечной оси
, т.е. чтобы они не влияли на процесс измерения. При этом центры масс акселерометров 1 и 2 располагают на поперечной оси  симметрично относительно точки
симметрично относительно точки  , а оси чувствительности акселерометров 1 и 2 ориентируют параллельно продольной оси
, а оси чувствительности акселерометров 1 и 2 ориентируют параллельно продольной оси  ; центры масс акселерометров 3 и 4 располагают на продольной оси симметрично относительно точки , а оси чувствительности акселерометров 3 и 4 ориентируют параллельно нормальной оси
; центры масс акселерометров 3 и 4 располагают на продольной оси симметрично относительно точки , а оси чувствительности акселерометров 3 и 4 ориентируют параллельно нормальной оси  ; центры масс акселерометров 5 и 6 располагают на нормальной оси симметрично относительно точки , а оси чувствительности акселерометров 5 и 6 ориентируют параллельно поперечной оси .
; центры масс акселерометров 5 и 6 располагают на нормальной оси симметрично относительно точки , а оси чувствительности акселерометров 5 и 6 ориентируют параллельно поперечной оси .
В соответствии с кинематической схемой акселерометры с 1 по 6 на основании ориентации их осей чувствительности измеряют ускорения, определяемые выражениями
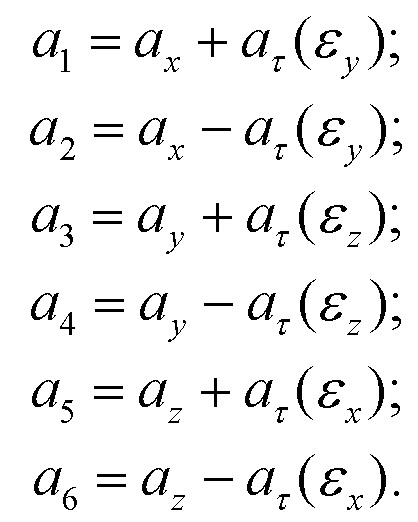 (1)
(1)
Для нахождения проекций ускорения центра масс на оси, связанные с корпусом летательного аппарата, в выражении (1) складывают ускорения каждой пары акселерометров, расположенных симметрично относительно центра масс летательного аппарата для каждой его строительной оси
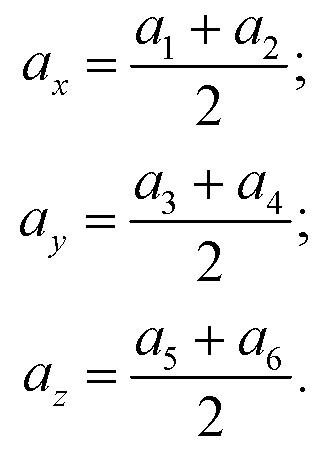 (2)
(2)
Для нахождения проекций тангенциальных ускорений на оси, связанные с корпусом летательного аппарата, в выражении (1) ускорения каждой пары акселерометров, расположенных симметрично относительно центра масс летательного аппарата для каждой его строительной оси
 (3)
(3)
На основании определения тангенциального ускорения ( ) проекции углового ускорения относительно центра масс летательного аппарата в соответствии с выражениями (3) формируют по формулам:
) проекции углового ускорения относительно центра масс летательного аппарата в соответствии с выражениями (3) формируют по формулам:
 (4)
(4)
На основании кинематического соотношения, что  проекции угловой скорости относительно центра масс летательного аппарата в соответствии с выражениями (4) формируют по формулам:
проекции угловой скорости относительно центра масс летательного аппарата в соответствии с выражениями (4) формируют по формулам:
 (5)
(5)
Таким образом, для определения инерциальных параметров, которые приведены в формулах (2) и (5) и которые необходимы для построения бескарданных систем ориентации и навигации, выполняют следующие действия:
1. Центры масс акселерометров и их осей чувствительности соответствующим образом располагают относительно центра масс летательного аппарата и его строительных осей.
2.Ускорения, измеряемые симметрично расположенными акселерометрами на одной оси, складывают. При этом формируют проекции ускорения центра масс летательного аппарата.
3. Ускорения, измеряемые симметрично расположенными акселерометрами на одной оси, вычитают, делят на расстояние между центрами масс акселерометров и интегрируют. При этом формируют проекции угловых скоростей относительно центра масс летательного аппарата.
Однако, так как в алгоритмах определения проекций угловых скоростей присутствует операция интегрирования, то погрешность формирования этих параметров будет накапливаться в течение времени полета, что надо учитывать при построении соответствующих систем ориентации и навигации.
Реализацию данного способа можно осуществить как в аналоговых устройствах, так и в цифровых, а также с применением микроконтроллера.
| название | год | авторы | номер документа |
|---|---|---|---|
| Блок чувствительных элементов | 2024 |
|
RU2820025C1 |
| Способ спутниковой гравитационной градиентометрии | 2020 |
|
RU2745364C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ УГЛОВОГО ПОЛОЖЕНИЯ ПОДВИЖНОГО ОБЪЕКТА | 2005 |
|
RU2285931C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ УГЛОВ ПРОСТРАНСТВЕННОЙ ОРИЕНТАЦИИ ПОДВИЖНОГО ОБЪЕКТА | 2014 |
|
RU2555496C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ЦЕНТРА МАСС ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2564375C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ УГЛОВОГО ПОЛОЖЕНИЯ ПОДВИЖНОГО ОБЪЕКТА (ВАРИАНТЫ) | 2004 |
|
RU2257546C1 |
| СПОСОБ БЕСПЛАТФОРМЕННОЙ ИНЕРЦИАЛЬНОЙ НАВИГАЦИИ НА МИКРОМЕХАНИЧЕСКИХ ЧУВСТВИТЕЛЬНЫХ ЭЛЕМЕНТАХ | 2015 |
|
RU2577567C1 |
| СПОСОБ И УСТРОЙСТВО КОНТРОЛЯ ГОРИЗОНТАЛЬНОЙ ОРИЕНТАЦИИ АППАРАТА | 2007 |
|
RU2373562C2 |
| Инерциальный измерительный модуль | 2021 |
|
RU2761592C1 |
| СПОСОБ И УСТРОЙСТВО КОНТРОЛЯ ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2012 |
|
RU2502050C1 |
Изобретение относится к точному приборостроению, а именно к созданию систем ориентации и навигации летательных аппаратов (ЛА). Заявленный способ формирования инерциальной информации основан на измерении линейных ускорений шестью акселерометрами, которые объединяют в пары и их центры масс располагают на строительных осях симметрично относительно центра масс ЛА. При этом оси чувствительности каждой пары акселерометров ориентируют по строительным осям ЛА, которые перпендикулярны осям расположения центров масс пар акселерометров, одновременно оси чувствительности каждой пары акселерометров, расположенных на одной оси, ориентируют перпендикулярно соответствующим центростремительным ускорениям, а их сигналы одновременно складывают и вычитают, при этом сигналы после операции вычитания интегрируют и формируют инерциальные параметры. Техническим результатом изобретения является формирование инерциальных параметров на основании измерения линейных ускорений. 1 ил.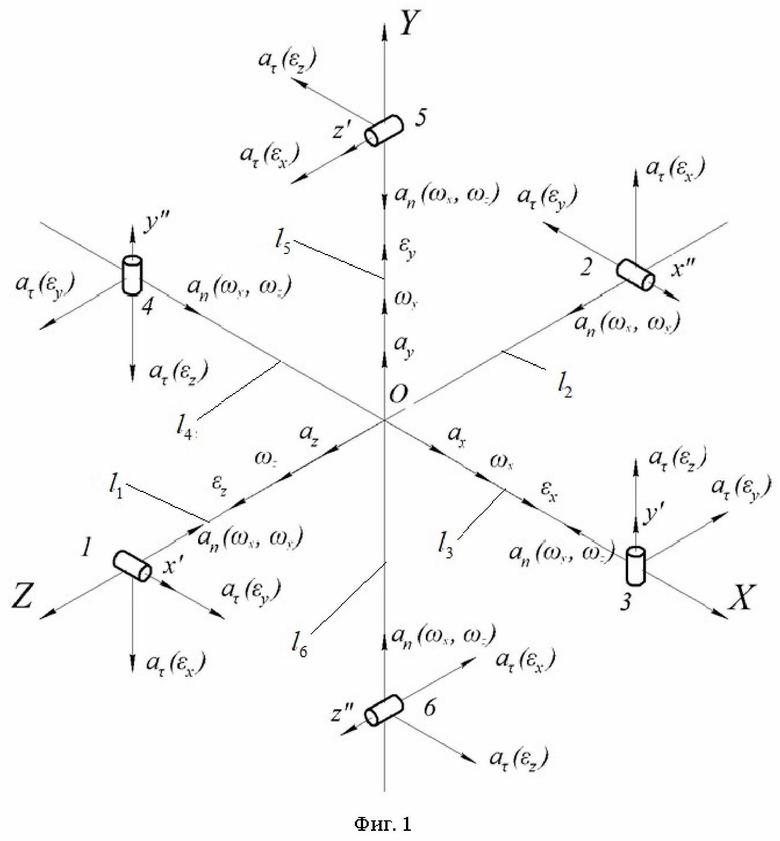
Способ формирования инерциальной информации, основанный на измерении линейных ускорений шестью акселерометрами, которые объединяют в пары и их центры масс располагают на строительных осях симметрично относительно центра масс летательного аппарата, а оси чувствительности каждой пары акселерометров ориентируют по строительным осям летательного аппарата, которые перпендикулярны осям расположения центров масс пар акселерометров, отличающийся тем, что оси чувствительности каждой пары акселерометров, расположенных на одной оси, ориентируют перпендикулярно соответствующим центростремительным ускорениям, а их сигналы одновременно складывают и вычитают, при этом сигналы после операции вычитания интегрируют и формируют инерциальные параметры в соответствии со следующими с формулами:


где ax, ay, az – проекции линейного ускорения центра масс летательного аппарата; ωx, ωy, ωz – проекции угловой скорости относительно центра масс летательного аппарата; a1, a2, a3, a4, a5, a6 – проекции ускорений на оси чувствительностей акселерометров; l – расстояние от центра масс летательного аппарата до центра масс каждого акселерометра.
| Способ определения центра масс летательного аппарата и устройство для его осуществления | 2016 |
|
RU2645018C1 |
| Бесплатформенная инерциальная навигационная система | 2021 |
|
RU2768616C1 |
| НАВИГАЦИОННАЯ СИСТЕМА И КОРПУС НАВИГАЦИОННОЙ СИСТЕМЫ | 2018 |
|
RU2702845C1 |
| US 5065627 A1, 19.11.1991. | |||

