Изобретение относится к области железнодорожного транспорта, в частности для обеспечения питания и управления механизмами подъема и вывешивания рельсошпальной решетки с использованием путевых машин циклического и непрерывно-циклического действия.
В настоящее время на путевых выправочно-подбивочно-рихтовочных машинах широко используются известные из уровня науки и техники исполнительные механизмы вывешивания и подъема рельсошпальной решетки с использованием роликовых захватных устройств и дополнительных крюковых захватов. Исполнительный механизм - подъемно-рихтующее устройство реализует заданное смещение рельсошпальной решетки. Подъемно-рихтующее устройство включает в себя систему рельсовых захватов, работающих при неподвижной или движущейся путевой машине и механизм перемещения захватов вместе с рельсошпальной решеткой в плане, продольном профиле и по уровню.
В основу процесса управления выправочной подъемкой рельсошпальной решетки положены следующие группы операций:
- выбор базового рельса. На прямом участке пути выбирается любой рельс, а в кривой - внутренний, относительно которого устанавливается продольный профиль рельсошпальной решетки;
- установка необходимой величины выправочной подъемки, гарантирующей сокрытие исходных неровностей пути;
- установка необходимой величины возвышения небазового рельса относительно базового рельса.
Применительно к путевым машинам циклического действия типа ВПР (ВПР-02М, ВПРС-02), управление операциями выправочной подъемки рельсошпальной решетки реализовано следующим образом. Для измерения стрелы изгиба пути в продольном профиле служит пропорциональный датчик высоты. В нем первичный преобразователь, имеющий поводок, контактирует с тросом-хордой. Поводок через тросовую передачу связан с прецизионным потенциометром. Первичный преобразователь закреплен на измерительной тележке. Изменение положения измерительной тележки по высоте относительно троса-хорды также преобразуются в электрический сигнал. Так как на результаты измерения стрелы изгиба в вертикальной плоскости по оси пути влияет положение пути по уровню, то для исключения этого влияния на измерительную тележку устанавливается датчик уровня, имеющий на выходе сигнал, пропорциональный углу наклона измерительной тележки. Выходное напряжение датчика уровня алгебраически суммируются с напряжением на выходе датчика продольного профиля с учетом соответствующих коэффициентов передачи. Результирующий сигнал управляет подъемом (опусканием) базовой нити (правой или левой) продольного профиля, а управление по небазовой нити (соответственно левой или правой) осуществляется от датчика уровня, установленного на измерительной тележке. В качестве датчика уровня применяются бесконтактный маятниковый датчик индуктивного принципа действия или маятниковый датчик с прецизионным потенциометром [см. Путевые машины: Учебник для вузов железнодорожного транспорта / М.В. Попович, В.М. Бугаенко, Б.Г. Волковойнов и др. Под ред. М.В. Поповича, В.М. Бугаенко. - Москва: Желдориздат, 2007. 756 с.].
Существующий принцип управления исполнительными механизмами вывешивания и подъема рельсошпальной решетки широко используется в различных путевых машинах и устройствах.
Так, известен подъемно-рихтовочный агрегат путевой машины [патент на изобретение RU 2265689 C2, E01B 27/17(МПК 7), E01B 33/00(МПК 7), опубл. 10.12.2005]. На каретке предложенного подъемно-рихтовочного агрегата путевой машины установлены элементы контроля и управления подъемом рельсошпальной решетки и закреплены одним концом гидроцилиндры подъема, верхние части которых соединены с рамой путевой машины. При этом элементы контроля и управления подъемом рельсошпальной решетки выдают сигнал о касании опорных элементов головой рельсов и разрешают поворот захватов подъемно-рихтовочного агрегата вокруг горизонтальных осей гидроцилиндрами поворота захватов. Автоматическое управление высотой подъемки всей рельсошпальной решетки и любой ее стороны осуществляется автоматически от измерительной системы путевой машины.
Известна выправочно-подбивочно-рихтовочная машина [патент на изобретение RU 2338823 C2, E01B 27/17(2006.01), опубл. 20.11.2008]. Данная выправочно-подбивочно-рихтовочная машина включает контрольно-измерительную систему, обеспечивающую, в частности, контроль за подъемом главного рельсового пути и его ответвления. При этом по команде контрольно-измерительной системы приводы вертикального перемещения поднимают подъемно-рихтовочный агрегат на требуемую высоту, осуществляя одновременный трехточечный подъем и удержание главного пути и ответвления пути.
Также известно устройство для подъема рельсошпальной решетки [патент на изобретение RU 2109871 C1, E01B 29/04(1995.01), E01B 27/17(1995.01), опубл. 27.04.1998].
Данное устройство для подъема рельсошпальной решетки содержит электромагнитные захваты для рельсов, включающие в себя электромагниты, приводы перестановки захватов по высоте и управляемый источник напряжения. Устройство также содержит блок преобразования сигналов с четырьмя входами, к двум из которых подключены датчики, определяющие соответственно температуру электромагнита захвата, расположенного над левой рельсовой нитью рельсошпальной решетки, и усилие подъема захватом этой рельсовой нити. К другим двум входам блока преобразования сигналов подключены датчики, которые определяют соответственно температуру расположенного над правой рельсовой нитью электромагнита захвата и усилие подъема им этой рельсовой нити. Блок преобразования сигналов имеет четыре выхода, два из которых соединены с управляемым источником напряжения. Два других выхода блока преобразования сигналов соединены с сигнализатором.
При работе устройства для подъема рельсошпальной решетки блок преобразования сигналов преобразует выходные сигналы датчиков усилия подъема захватов левой и правой рельсовых нитей с учетом текущего усилия подъема каждой рельсовой нити и выдает соответствующие сигналы на управляемый источник напряжения, который поддерживает на каждом из электромагнитов захватов для рельсов оптимальное напряжение. В зависимости от усилия подъема, на каждом захвате для рельсов устанавливается минимально необходимое напряжение питания электромагнитов захватов для надежного удерживания ими рельсошпальной решетки. В том случае, если температура электромагнитов захватов для рельсов приближается к критической, сигнализатор выдает сигнал, оповещающий оператора о критической температуре указанных электромагнитов. Для этого сигналы датчиков температуры электромагнитов захвата, расположенных над правой и левой рельсовой нитью поступают в блок преобразования сигналов, где они преобразуются и поступают в сигнализатор.
Общим недостатком предлагаемых решений является то, что они не обеспечивают независимое управление подъемом правой и левой нитей продольного профиля рельсошпальной решетки, что не позволяет контролировать стрелу изгиба в вертикальной плоскости по оси пути.
Наиболее близким по технической сущности к заявляемому устройству является устройство управления питанием исполнительного механизма вывешивания и подъема рельсошпальной решетки EK-819SV-00/GT, входящее в состав системы управления подъемно-рихтовочным устройством путевой выправочно-подбивочно-рихтовочной машины Duomatic 09-32 CSM (производитель - Plasser & Theurer, Австрийская Республика) для захвата и перемещения рельсошпальной решетки в плане, продольном профиле и по уровню.
Известное устройство управления питанием исполнительного механизма вывешивания и подъема рельсошпальной решетки (РШР) обеспечивает управление подъемом нити рельсошпальной решетки для заданного режима вывешивания и подъемки РШР, гарантирующего сокрытие исходных неровностей пути для одного блока захватов подъемно-рихтовочного устройства путевой машины.
Данное устройство содержит модуль входного преобразователя напряжений, модуль оптоэлектронной развязки, модуль индикации состояния, модуль формирования управляющего сигнала приводов подъема блока захватов подъемно-рихтовочного устройства, включающий источник-стабилизатор опорных напряжений A, первичный каскад формирования сигнала A1, вторичный каскад формирования сигнала A2, релейный коммутатор A1 и релейный коммутатор A2.
Выход модуля входного преобразователя напряжения связан с входом источника-стабилизатора опорных напряжений A, выход которого через общую точку соединен с входами первичного каскада формирования сигнала A1 и вторичного каскада формирования сигнала A2, выходы которых соединены с соответствующими входами релейного коммутатора A1 и релейного коммутатора A2. Второй выход первичного каскада формирования сигнала A1 соединен со вторым входом вторичного каскада формирования сигнала A2.
Входы питания модуля оптоэлектронной развязки, модуля индикации состояния, первичного каскада формирования сигнала A1 и вторичного каскада формирования сигнала A2 связаны с выходами питания модуля входного преобразователя напряжения и источника-стабилизатора опорных напряжений A. При этом выход модуля оптоэлектронной развязки связан с соответствующим входом модуля индикации состояния.
Недостатком данного устройства управления питанием исполнительного механизма вывешивания и подъема рельсошпальной решетки также является то, что оно не обеспечивает независимое управление подъемом правой и левой нитей продольного профиля рельсошпальной решетки, что не позволяет контролировать стрелу изгиба в вертикальной плоскости по оси пути.
Техническим результатом заявленного изобретения является расширение функциональных возможностей устройства независимого управления питанием исполнительных механизмов вывешивания и подъема рельсошпальной решетки, за счет обеспечения параллельного независимого управления подъемом правой и левой нитей продольного профиля рельсошпальной решетки, что позволяет контролировать стрелу изгиба в вертикальной плоскости по оси пути с целью обеспечения заданного режима вывешивания и подъемки рельсошпальной решетки.
Указанный технический результат достигается тем, что в устройстве независимого управления питанием исполнительных механизмов вывешивания и подъема рельсошпальной решетки, включающем модуль входного преобразователя напряжения, выходы которого связаны с входами модуля оптоэлектронной развязки и модуля формирования управляющего сигнала приводов подъема правого блока захватов подъемно-рихтовочного устройства, включающего источник-стабилизатор опорных напряжений A, выходы которого соединены с входами первичного каскада формирования сигнала A1 и вторичного каскада формирования сигнала A2, выходы первичного каскада формирования сигнала A1 и вторичного каскада формирования сигнала A2 соединены с соответствующими входами релейного коммутатора A1 и релейного коммутатора A2, второй выход первичного каскада формирования сигнала A1 соединен со вторым входом вторичного каскада формирования сигнала A2, при этом выходы питания модуля входного преобразователя напряжения и источника-стабилизатора опорных напряжений A связаны с входами питания первичного каскада формирования сигнала A1, вторичного каскада формирования сигнала A2, модуля оптоэлектронной развязки и связанного с ним модуля индикации состояний, новым является то, что дополнительно содержит модуль формирования управляющего сигнала приводов подъема левого блока захватов подъемно-рихтовочного устройства, включающий источник-стабилизатор опорных напряжений B, выходы которого соединены с входами первичного каскада формирования сигнала B1 и вторичного каскада формирования сигнала B2, выходы первичного каскада формирования сигнала B1 и вторичного каскада формирования сигнала B2 соединены с соответствующими входами релейного коммутатора B1 и релейного коммутатора B2, второй выход первичного каскада формирования сигнала B1 соединен со вторым входом вторичного каскада формирования сигнала B2, при этом входы источника-стабилизатора опорных напряжений A и источника-стабилизатора опорных напряжений B соединены через общую точку с соответствующим выходом модуля входного преобразователя напряжений, а входы питания первичного каскада формирования сигнала B1 и вторичного каскада формирования сигнала B2 - с выходами питания модуля входного преобразователя напряжений.
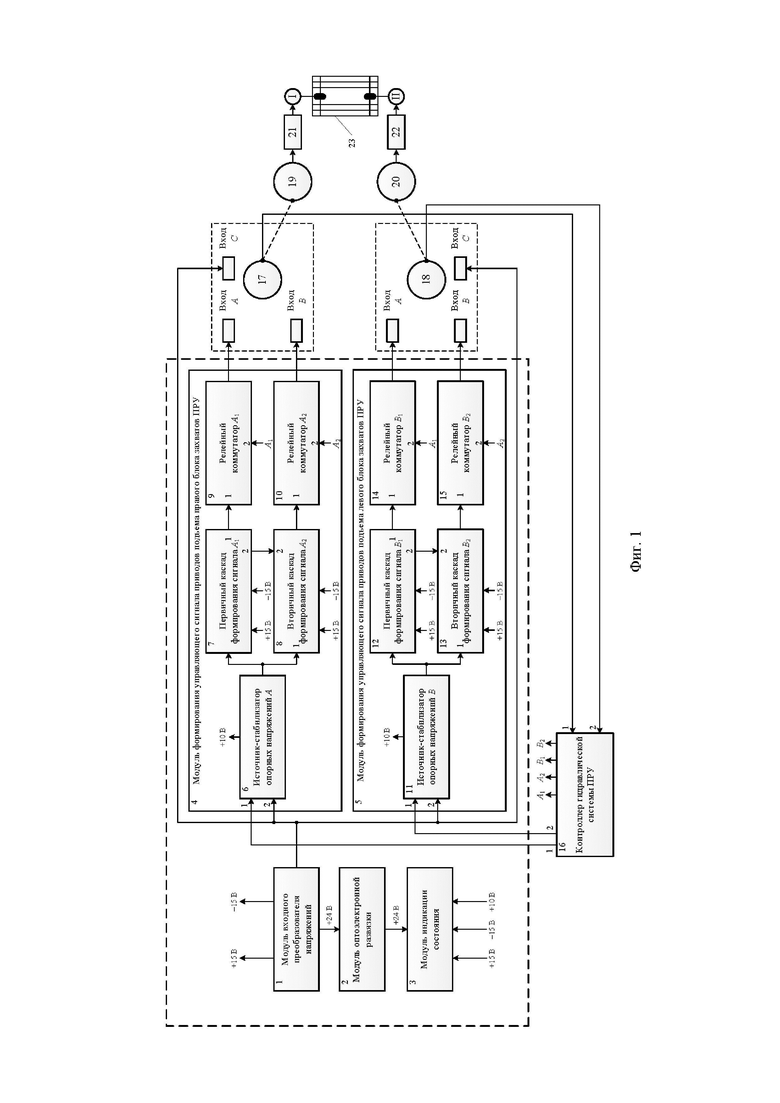
Сущность предлагаемого технического решения показана на структурной схеме заявляемого устройства независимого управления питанием исполнительных механизмов вывешивания и подъема рельсошпальной решетки, представленной на фиг. 1. На фиг. 1 принята аббревиатура ПРУ - подъемно-рихтовочное устройство.
Предлагаемое устройство независимого управления питанием исполнительных механизмов вывешивания и подъема рельсошпальной решетки включает модуль входного преобразователя напряжений (1), модуль оптоэлектронной развязки (2), модуль индикации состояния (3), модуль формирования управляющего сигнала приводов подъема правого блока захватов ПРУ (4), включающий источник-стабилизатор опорных напряжений A (6), первичный каскад формирования сигнала A1 (7), вторичный каскад формирования сигнала A2 (8), релейный коммутатор A1 (9), релейный коммутатор A2 (10), модуль формирования управляющего сигнала приводов подъема левого блока захватов ПРУ (5), включающий источник-стабилизатор опорных напряжений B (11), первичный каскад формирования сигнала B1 (12), вторичный каскад формирования сигнала B2 (13), релейный коммутатор B1 (14), релейный коммутатор B2 (15).
Объектом управления заявляемого устройства является подъемно-рихтовочное устройство путевой машины для вывешивания и подъема рельсошпальной решетки (23), включающее следующие взаимосвязанные элементы, схематически представленные на фиг. 1:
- сервовентель (19) гидроцилиндров подъема правого блока захватов ПРУ;
- сервовентель (20) гидроцилиндров подъема левого блока захватов ПРУ;
- гидроцилиндры (21) приводов подъема правого блока захватов ПРУ;
- гидроцилиндры (22) приводов подъема левого блока захватов ПРУ;
- правый (I) и левый (II) блоки захватов подъемно-рихтовочного устройства путевой машины.
Элементы подъемно-рихтовочного устройства путевой машины для вывешивания и подъема рельсошпальной решетки не входят в состав заявляемого устройства независимого управления питанием исполнительных механизмов вывешивания и подъема рельсошпальной решетки и показаны на фиг. 1 с целью пояснения сущности предлагаемого технического решения.
Каждый из блоков захватов (I, II) подъемно-рихтовочного устройства путевой машины включает систему роликовых рельсовых захватов тарельчатого типа, связанных посредством сферических шарнирных узлов со штоками гидроцилиндров (21, 22) подъема соответствующего блока захватов ПРУ (I, II). Управление гидроцилиндрами приводов подъема правого и левого блока захватов ПРУ (I, II) осуществляется посредством соответствующих сервовентилей (19, 20).
Управление сервовентилями (19, 20) гидроцилиндров приводов подъема правого и левого блока захватов ПРУ осуществляется посредством соответствующих реверсивных коллекторных двигателей постоянного тока (17, 18). Каждый реверсивный коллекторный двигатель постоянного тока (17, 18) также включает дополнительные управляющий контроллер и тахогенератор (на фиг. 1 не показаны). Выходы дополнительных тахогенераторов реверсивных коллекторных двигателей постоянного тока (17, 18) связаны соответственно с первым и вторым входами контроллера гидравлической системы ПРУ (16), осуществляющего общее управление подъемно-рихтовочным устройством путевой машины. Контроллер гидравлической системы ПРУ (16) путевой машины и реверсивные коллекторные двигатели постоянного тока (17, 18) не входят в состав заявляемого устройства независимого управления питанием исполнительных механизмов вывешивания и подъема рельсошпальной решетки и показаны на фиг. 1 с целью пояснения сущности предлагаемого технического решения.
Первый выход модуля входного преобразователя напряжений (1) соединен со вторыми входами источника-стабилизатора опорных напряжений A (6) модуля формирования управляющего сигнала приводов подъема правого блока захватов ПРУ (4), источника-стабилизатора опорных напряжений B (11) модуля формирования управляющего сигнала приводов подъема левого блока захватов ПРУ (5) а также с силовыми входами C управляющих контроллеров реверсивных коллекторных двигателей постоянного тока (17, 18).
Выход источника-стабилизатора опорных напряжений A (6) через общую точку соединен с входом первичного каскада формирования сигнала A1 (7) и с первым входом вторичного каскада формирования сигнала A2 (8), второй вход которого соединен со вторым выходом первичного каскада формирования сигнала A1 (7). Первый выход первичного каскада формирования сигнала A1 (7) и выход вторичного каскада формирования сигнала A2 (8) связаны соответственно с первым входом релейного коммутатора A1 (9) и первым входом релейного коммутатора A2 (10), выходы которых соответственно связаны с управляющими входами A и B управляющего контроллера реверсивного коллекторного двигателя постоянного тока (17).
Выход источника-стабилизатора опорных напряжений B (11) через общую точку соединен с входом первичного каскада формирования сигнала B1 (12) и с первым входом вторичного каскада формирования сигнала B2 (13), второй вход которого соединен со вторым выходом первичного каскада формирования сигнала B1 (12). Первый выход первичного каскада формирования сигнала B1 (12) и выход вторичного каскада формирования сигнала B2 (13) связаны соответственно с первым входом релейного коммутатора B1 (14) и первым входом релейного коммутатора B2 (15), выходы которых соответственно связаны с управляющими входами A и B управляющего контроллера реверсивного коллекторного двигателя постоянного тока (18).
Выходы контроллера гидравлической системы ПРУ (16) связаны со следующими входами компонентов модулей (4, 5) формирования управляющего сигнала приводов подъема правого и левого блоков захватов ПРУ:
- выход (1) контроллера (16) - первый вход источника-стабилизатора опорных напряжений A (6);
- выход (2) контроллера (16) - первый вход источника-стабилизатора опорных напряжений B (11);
- выход A1 контроллера (16) - второй вход релейного коммутатора A1 (9);
- выход A2 контроллера (16) - второй вход релейного коммутатора A2 (10);
- выход B1 контроллера (16) - второй вход релейного коммутатора B1 (14);
- выход B2 контроллера (16) - второй вход релейного коммутатора B2 (15).
Выходы контрольного опорного напряжения +10 В источника-стабилизатора опорных напряжений A (6), источника-стабилизатора опорных напряжений B (11), а также выходы питания +15 В, -15 В и +24 В модуля входного преобразователя напряжений (1) связаны со входами следующих компонентов заявляемого устройства:
- первичный каскад формирования сигнала A1 (7) - входы питания +15 В, -15 В;
- вторичный каскад формирования сигнала A2 (8) - входы питания +15 В, -15 В;
- первичный каскад формирования сигнала B1 (12) - входы питания +15 В, -15 В;
- вторичный каскад формирования сигнала B2 (13) - входы питания +15 В, -15 В;
- модуль индикации состояния (3) - входы питания +10 В, +15 В, -15 В;
- модуль оптоэлектронной развязки (2) - вход питания +24 В.
При этом выход +24 В модуля оптоэлектронной развязки (2) связан с соответствующим входом модуля индикации состояния (3).
Предлагаемое устройство независимого управления питанием исполнительных механизмов вывешивания и подъема рельсошпальной решетки соответствует требованиям стандарта МЭК 60571-2007 «Подвижной состав железных дорог. Электронное оборудование, применяемое в железнодорожных транспортных системах» и выполнено в форме сменного модуля в соответствии с конструктивом «Евромеханика» и требованиями ГОСТ Р МЭК 60297-3-101-2006.
Реализация компонентов заявляемого устройства выполнена с использованием пассивных электронных компонентов, дискретных полупроводниковых приборов и интегральных микросхем низкой степени интеграции и соответствует известным из уровня науки и техники принципам построения схем преобразования аналоговых сигналов на операционных усилителях [см. Волович Г.И. Схемотехника аналоговых и аналого-цифровых электронных устройств / Г.И. Волович. Москва: Издательский дом «Додэка-XXI», 2005. 528 с.] и построения вторичных источников электропитания [см. Гейтенко Е.Н. Источники вторичного электропитания. Схемотехника и расчет. Учебное пособие / Е.Н. Гейтенко. Москва: СОЛОН-ПРЕСС, 2008. 448 с.].
Модуль входного преобразователя напряжений (1) реализован в форме импульсного преобразователя-стабилизатора постоянного напряжения в моноблочном исполнении.
Модуль оптоэлектронной развязки (2) реализован на основе транзисторной оптической пары и обеспечивает оптическую гальваническую развязку входной силовой цепи.
Модуль индикации состояния (3) реализован в форме набора светодиодов индикации наличия соответствующих напряжений питания (+10 В, -10 В, +15 В, +24 В) с входными управляющими транзисторными ключами по схеме с общим эмиттером.
Источник-стабилизатор опорных напряжений A (6) модуля формирования управляющего сигнала приводов подъема правого блока захватов ПРУ (4) и источник-стабилизатор опорных напряжений B (11) модуля формирования управляющего сигнала приводов подъема левого блока захватов ПРУ (5) реализованы в форме схемотехнической комбинации пассивных электронных компонентов и дискретных полупроводниковых приборов и представляют собой последовательный параметрический стабилизатор напряжения на биполярном транзисторе с дополнительным источником опорного напряжения в интегральном исполнении.
Первичный каскад формирования сигнала A1 (7) модуля формирования управляющего сигнала приводов подъема правого блока захватов ПРУ (4) и первичный каскад формирования сигнала B1 (12) модуля формирования управляющего сигнала приводов подъема левого блока захватов ПРУ (5) реализованы в форме схемотехнической комбинации пассивных электронных компонентов и дискретных полупроводниковых приборов, операционных усилителей в интегральном исполнении и представляют собой однополярный стабилизатор напряжения на основе операционного усилителя, построенный по схеме неинвертирующего усилителя.
Вторичный каскад формирования сигнала A2 (8) модуля формирования управляющего сигнала приводов подъема правого блока захватов ПРУ (4) и вторичный каскад формирования сигнала B2 (13) модуля формирования управляющего сигнала приводов подъема левого блока захватов ПРУ (5) реализованы в форме схемотехнической комбинации пассивных электронных компонентов и дискретных полупроводниковых приборов, операционных усилителей в интегральном исполнении и представляют собой однополярный инвертирующий стабилизатор напряжения на основе операционного усилителя.
Релейные коммутаторы A1 (9), A2 (10) модуля формирования управляющего сигнала приводов подъема правого блока захватов ПРУ (4) и релейные коммутаторы B1 (14), B2 (15) модуля формирования управляющего сигнала приводов подъема левого блока захватов ПРУ (5) включают электромагнитные реле коммутации сигналов управления коллекторными двигателями постоянного тока по соответствующим управляющим сигналам от контроллера гидравлической системы подбивочно-рихтовочного устройства (16).
Процесс функционирования предлагаемого устройства независимого управления питанием исполнительных механизмов вывешивания и подъема рельсошпальной решетки рассмотрим на примере задачи управления подъемом нити рельсошпальной решетки правым и левым блоками захватов подъемно-рихтовочного устройства путевой выправочно-подбивочно-рихтовочной машины Duomatic 09-32 CSM (производитель - Plasser & Theurer, Австрийская Республика, далее - путевая машина) в режиме ранней подъемки РШР.
При этом заявляемое устройство независимого управления питанием исполнительных механизмов вывешивания и подъема рельсошпальной решетки:
- посредством реверсивного коллекторного двигателя постоянного тока (17) обеспечивает непосредственное управление сервовентилем гидроцилиндров подъема правого блока захватов ПРУ (19) путевой машины;
- посредством реверсивного коллекторного двигателя постоянного тока (18) обеспечивает непосредственное управление сервовентилем гидроцилиндров подъема левого блока захватов ПРУ (20) путевой машины.
Модуль входного преобразователя напряжений (1) обеспечивает преобразование и стабилизацию постоянного напряжения бортовой сети питания путевой машины в набор выходных напряжений питания +15 В, -15 В и +24 В, при этом:
- выходное напряжение питания +24 В передается на вход модуля оптоэлектронной развязки (2) и на соответствующие входы источника-стабилизатора опорных напряжений A (6) модуля формирования управляющего сигнала приводов подъема правого блока захватов ПРУ (4) и источника-стабилизатора опорных напряжений B (11) модуля формирования управляющего сигнала приводов подъема левого блока захватов ПРУ (5);
- выходные напряжения питания +15 В и -15 В обеспечивают питание операционных усилителей, входящих в состав стабилизаторов напряжений первичного каскада формирования сигнала A1 (7), первичного каскада формирования сигнала B1 (12), вторичного каскада формирования сигнала A2 (8) и вторичного каскада формирования сигнала B2 (13);
- также выходные напряжения +15 В и -15 В поступают на соответствующие входы модуля индикации состояния (3).
Модуль оптоэлектронной развязки (2) обеспечивает гальваническую развязку модуля входного преобразователя напряжений (1) и модуля индикации состояния (3). При этом модуль индикации состояний обеспечивает визуальную индикацию наличия или отсутствия контрольного опорного напряжения +10 В и напряжений питания +15 В, -15 В и +24 В.
Дальнейшее независимое управление питанием исполнительных механизмов вывешивания и подъема рельсошпальной решетки обеспечивается параллельным функционирование компонентов модуля формирования управляющего сигнала приводов подъема правого блока захватов ПРУ (4) и модуля формирования управляющего сигнала приводов подъема левого блока захватов ПРУ (5).
Процесс функционирования модуля формирования управляющего сигнала приводов подъема правого блока захватов ПРУ (4) предполагает:
- с использованием источника-стабилизатора опорных напряжений A (6) выполняется формирование и стабилизация совокупности опорных напряжений с последующей передачей управляющего опорного напряжения на соответствующие входы первичного каскада формирования сигнала A1 (7), вторичного каскада формирования сигнала A2 (8) и контрольного опорного напряжения с номинальным значением +10 В - на соответствующий вход модуля индикации состояния (3);
- номинальное значение управляющего опорного напряжения определяется соответствующим управляющим сигналом «1» от контроллера гидравлической системы ПРУ (16), поступающим на первый вход источника-стабилизатора опорных напряжений A (6) и воздействующим на потенциометрический регулятор глубины обратной связи параметрического стабилизатора напряжения, входящего в состав источника-стабилизатора опорных напряжений A (6). При этом параметры управляющего опорного напряжения определяются предварительно заданным режимом вывешивания и подъемки рельсошпальной решетки в соответствии с требованиями к величине выправочной подъемки, гарантирующей сокрытие исходных неровностей РШР;
- с использованием взаимосвязанных первичного каскада формирования сигнала A1 (7) и вторичного каскада формирования сигнала A2 (8) выполняется преобразование и стабилизация управляющего опорного напряжения с получением на выходах первичного каскада формирования сигнала A1 (7) и вторичного каскада формирования сигнала A2 (8) соответствующих управляющих сигналов A1 и A2 противоположной полярности;
- с использованием релейного коммутатора A1 (9) и релейного коммутатора A2 (10), управляющие сигналы A1 и A2 передаются на соответствующие управляющие входы A и B управляющего контроллера коллекторного двигателя постоянного тока (17). Режимы срабатывания релейного коммутатора A1 (9) и релейного коммутатора A2 (10) определяются управляющими сигналами A1 и A2 от контроллера гидравлической системы ПРУ (16), непосредственно воздействующими на обмотки электромагнитных реле соответствующих релейных коммутаторов A1 (9) и A2 (10).
Процесс функционирования модуля формирования управляющего сигнала приводов подъема левого блока захватов ПРУ (5) предполагает:
- с использованием источника-стабилизатора опорных напряжений B (11) выполняется формирование и стабилизация совокупности опорных напряжений с последующей передачей управляющего опорного напряжения на соответствующие входы первичного каскада формирования сигнала B1 (12), вторичного каскада формирования сигнала B2 (13) и контрольного опорного напряжения с номинальным значением +10 В - на соответствующий вход модуля индикации состояния (3);
- номинальное значение управляющего опорного напряжения определяется соответствующим управляющим сигналом «2» от контроллера гидравлической системы ПРУ (16), поступающим на первый вход источника-стабилизатора опорных напряжений B (11) и воздействующим на потенциометрический регулятор глубины обратной связи параметрического стабилизатора напряжения, входящего в состав источника-стабилизатора опорных напряжений B (11). При этом параметры управляющего опорного напряжения определяются предварительно заданным режимом вывешивания и подъемки рельсошпальной решетки в соответствии с требованиями к величине выправочной подъемки, гарантирующей сокрытие исходных неровностей РШР;
- с использованием взаимосвязанных первичного каскада формирования сигнала B1 (12) и вторичного каскада формирования сигнала B2 (13) выполняется преобразование и стабилизация управляющего опорного напряжения с получением на выходах первичного каскада формирования сигнала B1 (12) и вторичного каскада формирования сигнала B2 (13) соответствующих управляющих сигналов B1 и B2 противоположной полярности;
- с использованием релейного коммутатора B1 (14) и релейного коммутатора B2 (15), управляющие сигналы B1 и B2 передаются на соответствующие управляющие входы A и B управляющего контроллера коллекторного двигателя постоянного тока (18). Режимы срабатывания релейного коммутатора B1 (14) и релейного коммутатора B2 (15) определяются управляющим сигналами B1 и B2 от контроллера гидравлической системы ПРУ (16), непосредственно воздействующими на обмотки электромагнитных реле соответствующих релейных коммутаторов B1 (14) и B2 (15).
Элементы модуля формирования управляющего сигнала приводов подъема правого блока захватов ПРУ (4) и модуля формирования управляющего сигнала приводов подъема левого блока захватов ПРУ (5) путевой машины совместно с контроллером гидравлической системы подъемно-рихтовочного устройства (16) формируют контуры управления соответствующими реверсивными коллекторными двигателями постоянного тока (17, 18) сервовентилей гидроцилиндров приводов подъема правого и левого блоков захватов ПРУ (19, 20) с отрицательной обратной связью.
Параллельное функционирование данных контуров управления при наличии общего источника входного напряжения, которым является модуль входного преобразователя напряжений (1) и общих цепей распространения управляющих сигналов от контроллера гидравлической системы ПРУ (16) к компонентам модулей формирования управляющего сигнала приводов подъема правого (4) и левого (5) блоков захвата ПРУ обеспечивает параллельное независимое управление подъемом правой и левой нитей продольного профиля рельсошпальной решетки блоками захватов, размещенными на правой и левой стороне подъемно-рихтовочного устройства путевой машины.
Непосредственное управление реверсивными коллекторными двигателями (17, 18) сервовентилей гидроцилиндров подъема правого (19) и левого (20) блоков захватов подъемно-рихтовочного устройства осуществляется встроенными управляющими контроллерами соответствующих реверсивных коллекторных двигателей постоянного тока (17, 18) с использованием трехуровневой широтно-импульсной модуляции [см. Гольц М.Е. Автоматизированные электроприводы постоянного тока с широтно-импульсными преобразователями / М.Е. Гольц, А.Б. Гудзенко, В.М. Остреров, Л.А. Шпиглер. Москва: Энергия, 1972. 112 с.].
Таким образом, предлагаемое устройство независимого управления питанием исполнительных механизмов вывешивания и подъема рельсошпальной решетки обеспечивает параллельное независимое управление подъемом правой и левой нитей продольного профиля рельсошпальной решетки, что способствует повышению качества сокрытия исходных неровностей железнодорожного пути и росту эффективности использования путевых выправочно-подбивочно-рихтовочных машин в целом.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство регулирования пропорционального давления подбоек путевой машины | 2023 |
|
RU2820198C1 |
| Устройство регистрации отклонения троса-хорды путевой машины | 2023 |
|
RU2814803C1 |
| ПОДЪЕМНО-РИХТОВОЧНЫЙ АГРЕГАТ ПУТЕВОЙ МАШИНЫ | 2003 |
|
RU2265689C2 |
| Устройство регулирования скорости путевой машины | 2023 |
|
RU2803807C1 |
| МАШИНА ДЛЯ УКЛАДКИ ОБЪЕМНОЙ ГЕОРЕШЕТКИ | 2012 |
|
RU2521171C2 |
| МАШИНА ДЛЯ УКЛАДКИ ГЕОСИНТЕТИЧЕСКИХ МАТЕРИАЛОВ В ПОДБАЛЛАСТНЫЙ СЛОЙ ЖЕЛЕЗНОДОРОЖНОГО ПОЛОТНА БЕЗ СНЯТИЯ РЕЛЬСОШПАЛЬНОЙ РЕШЕТКИ | 2010 |
|
RU2477349C2 |
| Устройство для выправки железнодорожного пути | 1985 |
|
SU1331932A1 |
| Устройство для подъема рельсошпальной решетки железнодорожного пути | 1981 |
|
SU998629A1 |
| Устройство для рихтовки железнодорожного пути | 1983 |
|
SU1105536A1 |
| Устройство для подъема рельсошпальной решетки железнодорожного пути | 1981 |
|
SU998630A1 |
Изобретение относится к электротехнике, в частности к железнодорожному транспорту для обеспечения питания и управления механизмами подъема и вывешивания рельсошпальной решетки с использованием путевых машин циклического и непрерывно-циклического действия. Технический результат заключается в расширении функциональных возможностей устройства независимого управления питанием исполнительных механизмов вывешивания и подъема рельсошпальной решетки за счет обеспечения параллельного независимого управления подъемом правой и левой нитей продольного профиля рельсошпальной решетки, что позволяет контролировать стрелу изгиба в вертикальной плоскости по оси пути с целью обеспечения заданного режима вывешивания и подъемки рельсошпальной решетки. Указанный технический результат достигается тем, что устройство независимого управления питанием исполнительных механизмов вывешивания и подъема рельсошпальной решетки включает в себя модуль входного преобразователя напряжений, модуль оптоэлектронной развязки, модуль индикации состояния, модули формирования управляющего сигнала приводов подъема правого и левого блоков захватов подъемно-рихтовочного устройства (ПРУ). Модуль формирования управляющего сигнала приводов подъема правого блока захватов ПРУ включает в себя источник-стабилизатор опорных напряжений A, первичный каскад формирования сигнала A1, вторичный каскад формирования сигнала A2, релейный коммутатор A1, релейный коммутатор A2. Модуль формирования управляющего сигнала приводов подъема левого блока захватов ПРУ включает в себя источник-стабилизатор опорных напряжений B, первичный каскад формирования сигнала B1, вторичный каскад формирования сигнала B2, релейный коммутатор B1, релейный коммутатор B2. 1 ил.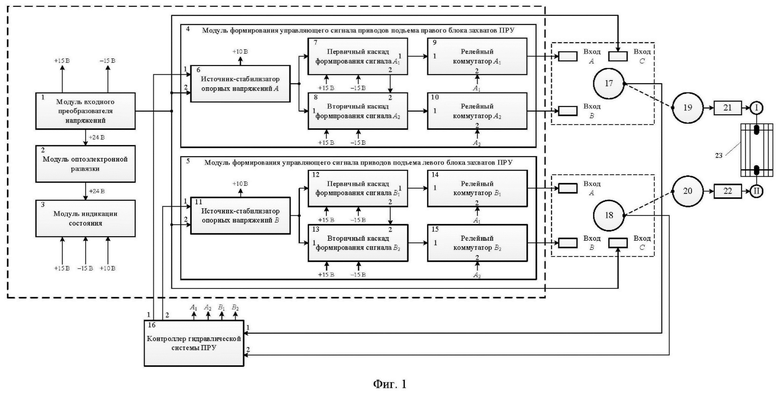
Устройство независимого управления питанием исполнительных механизмов вывешивания и подъема рельсошпальной решетки, включающее модуль входного преобразователя напряжения, выходы которого связаны с входами модуля оптоэлектронной развязки и модуля формирования управляющего сигнала приводов подъема правого блока захватов подъемно-рихтовочного устройства, включающего источник-стабилизатор опорных напряжений A, выходы которого соединены с входами первичного каскада формирования сигнала A1 и вторичного каскада формирования сигнала A2, выходы первичного каскада формирования сигнала A1 и вторичного каскада формирования сигнала A2 соединены с соответствующими входами релейного коммутатора A1 и релейного коммутатора A2, второй выход первичного каскада формирования сигнала A1 соединен со вторым входом вторичного каскада формирования сигнала A2, при этом выходы питания модуля входного преобразователя напряжения и источника-стабилизатора опорных напряжений A связаны с входами питания первичного каскада формирования сигнала A1, вторичного каскада формирования сигнала A2, модуля оптоэлектронной развязки и связанного с ним модуля индикации состояний, отличающееся тем, что дополнительно содержит модуль формирования управляющего сигнала приводов подъема левого блока захватов подъемно-рихтовочного устройства, включающий источник-стабилизатор опорных напряжений B, выходы которого соединены с входами первичного каскада формирования сигнала B1 и вторичного каскада формирования сигнала B2, выходы первичного каскада формирования сигнала B1 и вторичного каскада формирования сигнала B2 соединены с соответствующими входами релейного коммутатора B1 и релейного коммутатора B2, второй выход первичного каскада формирования сигнала B1 соединен со вторым входом вторичного каскада формирования сигнала B2, при этом входы источника-стабилизатора опорных напряжений A и источника-стабилизатора опорных напряжений B соединены через общую точку с соответствующим выходом модуля входного преобразователя напряжений, а входы питания первичного каскада формирования сигнала B1 и вторичного каскада формирования сигнала B2 – с выходами питания модуля входного преобразователя напряжений.
| ПРИБОР ДЛЯ ИСПЫТАНИЯ И ПРОВЕРКИ ЗРИТЕЛЬНЫХ ОЩУЩЕНИЙ | 1925 |
|
SU3767A1 |
| УСТРОЙСТВО ДЛЯ ПОДЪЕМА РЕЛЬСОШПАЛЬНОЙ РЕШЕТКИ | 1996 |
|
RU2128757C1 |
| РАБОЧАЯ КЛЕТЬ СТАНА ПОПЕРЕЧНОЙ ПРОКАТКИ ТРУБ | 0 |
|
SU212954A1 |
| УСТРОЙСТВО ДЛЯ ПОДЪЕМА РЕЛЬСОШПАЛЬНОЙ РЕШЕТКИ | 1995 |
|
RU2109871C1 |
| ПОДЪЕМНО-РИХТОВОЧНЫЙ АГРЕГАТ ПУТЕВОЙ МАШИНЫ | 2003 |
|
RU2265689C2 |
| US 11834794 B2, 05.12.2023. | |||

