Изобретение относится к области робототехники и, в частности, к системам управления согласованным движением группы автономных необитаемых подводных аппаратов (АНПА) в заданном строю.
Известна система группового вождения летательных аппаратов, содержащая первый задатчик параметров движения, последовательно соединенные первый суммирующий усилитель, первый блок коррекции и первый контур стабилизации, последовательно соединенные первый датчик параметров движения и первый блок связи, второй задатчик параметров движения, второй датчик параметров движения, последовательно соединенные второй суммирующий усилитель, второй блок коррекции, второй контур стабилизации, второй блок связи, вход которого соединен с выходом первого блока связи по линии радиосвязи, отличающаяся тем, что в нее дополнительно введены последовательно соединенные первый датчик возмущающих воздействий и первый блок интерполяции возмущающих воздействий, выход которого подключен к второму входу первого контура стабилизации, первый блок алгебраического суммирования, первый блок переключений, первый блок интерполяции заданных параметров движения, включенный между первым выходом первого блока переключений и первым входом первого суммирующего усилителя, на второй, третий и четвертый входы которого подключены соответственно второй, третий и четвертый выходы первого блока переключений, последовательно соединенные второй датчик возмущающих воздействий и второй блок интерполяции возмущающих воздействий, выход которого подключен к второму входу второго контура стабилизации, второй блок алгебраического суммирования, второй блок переключений, блок интерполяции параметров движения, второй блок интерполяции заданного параметра движения, включенный между первым выходом второго задатчика параметров движения и первым входом второго блока переключений, на второй - пятый входы которого подключены соответственно выход второго датчика параметров движения, выход второго блока алгебраического суммирования, первый выход второго блока связи, выход блока интерполяции параметров движения, на вход которого подключен первый выход второго блока связи, второй выход которого подключен к второму входу первого блока связи по линии радиосвязи, а первый - пятый выходы второго блока переключений подключены соответственно к первому - пятому входам второго суммирующего усилителя, причем на первый - пятый входы первого блока переключений подключены соответственно первый и второй выходы первого задатчика параметров движения, выход первого датчика параметров движения, второй выход первого блока связи и выход первого блока алгебраического суммирования, на первый, второй и третий входы которого подключены соответственно второй выход первого блока связи, выход первого датчика параметров движения и третий выход первого задатчика параметров движения, а на первый, второй и третий входы второго блока алгебраического суммирования подключены соответственно выход второго датчика параметров движения, второй выход второго задатчика параметров движения и первый выход второго блока связи, на второй вход которого подключен выход второго датчика параметров движения (Патент RU №2123171, МПК G01C 21/00, G01C 23/00, 1998 г.).
Недостатком этой системы является то, что она применима только к летательным аппаратам, что предполагает обмен данными между ними по радиоканалу и известную идентификацию величин внешних воздействий со стороны воздушной среды, которая при движении под водой невозможна.
Известен способ автономного управления строем космических аппаратов, согласно которому на этих аппаратах устанавливают приемно-передающие радиотехнические устройства, излучатели и приемники оптических сигналов, позиционно-чувствительный приемник оптических сигналов ведущего космического аппарата выполняют в виде набора плоских детекторов, расположенных на поверхности сферической оболочки, измеряют, запоминают и обрабатывают оптические сигналы, ориентируют лазерные излучатели ведомых комических аппаратов на позиционно-чувствительный приемник ведущего космического аппарата, по показаниям сигналов оптического излучения, принятого на ведущем космическом аппарате и одновременно отраженного от поверхности плоских детекторов и принятого на ведомых космических аппаратах, регулируют относительное движение и положение ведомых космических аппаратов в составе строя по радиокомандам ведущего космического аппарата корректируют расстояние между ведущим космическим аппаратом и ведомыми космическими аппаратами до достижения требуемых характеристик строя, причем плоские детекторы выполняют в виде взаимно контактирующих трапеций, расположенных последовательно вдоль широтных и меридианных линий на поверхности сферической оболочки (Патент RU №2704712. МПК B64G 1/36. Бюл. №31, 2019 г.).
Этот способ по своей технической сущности является наиболее близким к предлагаемому изобретению и принят за прототип.
Недостатком известного способа является использование централизованной схемы управления группой космических аппаратов, где аппарат лидер легко получает полную информацию о текущем положении всех ведомых и на ее основе строит команды управления этими ведомыми. Указанную схему управления в подводной робототехнике использовать невозможно ввиду очень малой пропускной способности гидроакустических каналов связи.
Задачей заявляемого изобретения является устранение указанного недостатка за счет использования световых источников и приемников навигационной информации и ее последующего преобразования в сигналы управления АНПА-ведомыми уже на их борту без использования малоэффективных, дорогостоящих и громоздких гидроакустических систем навигации и связи.
Технический результат заявляемого изобретения заключается в реализации системы группового управления строем АНПАза счет эффективного использования в бортовых системах управления АНПА-ведомыми только информации о положении и ориентации АНПА-лидера, которая формируется с помощью источников света АНПА-лидера и бортовых видеокамер АНПА-ведомых.
Поставленная задача решается тем, что в системе автономного управления подводных аппаратов строем, которая регулирует относительное движение и положение ведомых подводных аппаратов в составе строя и корректирует расстояние между подводным аппаратом лидером и ведомыми подводными аппаратами до достижения требуемых характеристик строя, на подводный аппарат лидер устанавливают не менее трех световых маяков, координаты которых относительно центра масс лидера известны, а на ведомые подводные аппараты устанавливают бортовые видеокамеры, в поле зрения которых находится подводный аппарат лидер и которые в процессе движения группы этих аппаратов формируют изображения и пиксельные координаты световых маяков, установленных на лидере, эти пиксельные координаты и известные исходные координаты световых маяков относительно центра масс лидера сравнивают и используют для определения текущего положения и ориентации подводного аппарата лидера относительно соответствующего ведомого подводного аппарата, это положение и ориентацию лидера используют для нахождения координат целевых точек, определяющих желаемое положение соответствующего ведомого подводного аппарата в заданном строю, сформированные координаты целевых точек подают на входы бортовых следящих систем соответствующих ведомых подводных аппаратов, которые отрабатывая эти входные сигналы, обеспечивают сохранение всеми подводными аппаратами ведомыми своего места в строю относительно подводного аппарата лидера.
Сопоставительный анализ признаков заявляемого способа с признаками аналога и прототипа свидетельствует о его соответствии критерию «новизна».
При этом отличительные признаки формулы изобретения решают следующие функциональные задачи.
Признак «…на подводный аппарат лидер устанавливают не менее трех световых маяков, координаты которых относительно центра масс лидера известны, а на ведомые подводные аппараты устанавливают бортовые видеокамеры, в поле зрения которых находится подводный аппарат лидер и которые в процессе движения группы этих аппаратов формируют изображения и пиксельные координаты световых маяков, установленных на лидере…» обеспечивает выявление отклонений соответствующих подводных аппаратов ведомых от их заданного места в строю относительно лидера.
Признак «…эти пиксельные координаты и известные исходные координаты световых маяков относительно центра масс лидера сравнивают и используют для определения текущего положения и ориентации подводного аппарата лидера относительно соответствующего ведомого подводного аппарата…», позволяет определить ориентацию и положение лидера относительно каждого ведомого в текущий момент времени.
Признак «... положение и ориентацию лидера используют для нахождения координат целевых точек, определяющих желаемое положение соответствующего ведомого подводного аппарата в заданном строю...» позволяет определить текущие координаты целевых (желаемых) точек нахождения каждого ведомого в общем строю.
Признак «…сформированные координаты целевых точек подают на входы бортовых следящих систем соответствующих ведомых подводных аппаратов, которые, отрабатывая эти входные сигналы, обеспечивают сохранение всеми подводными аппаратами ведомыми своего места в строю относительно подводного аппарата лидера…» позволяет реализовать процесс поддержания строя с использованием координат сформированных целевых точек для каждого аппарата ведомого и их систем управления.
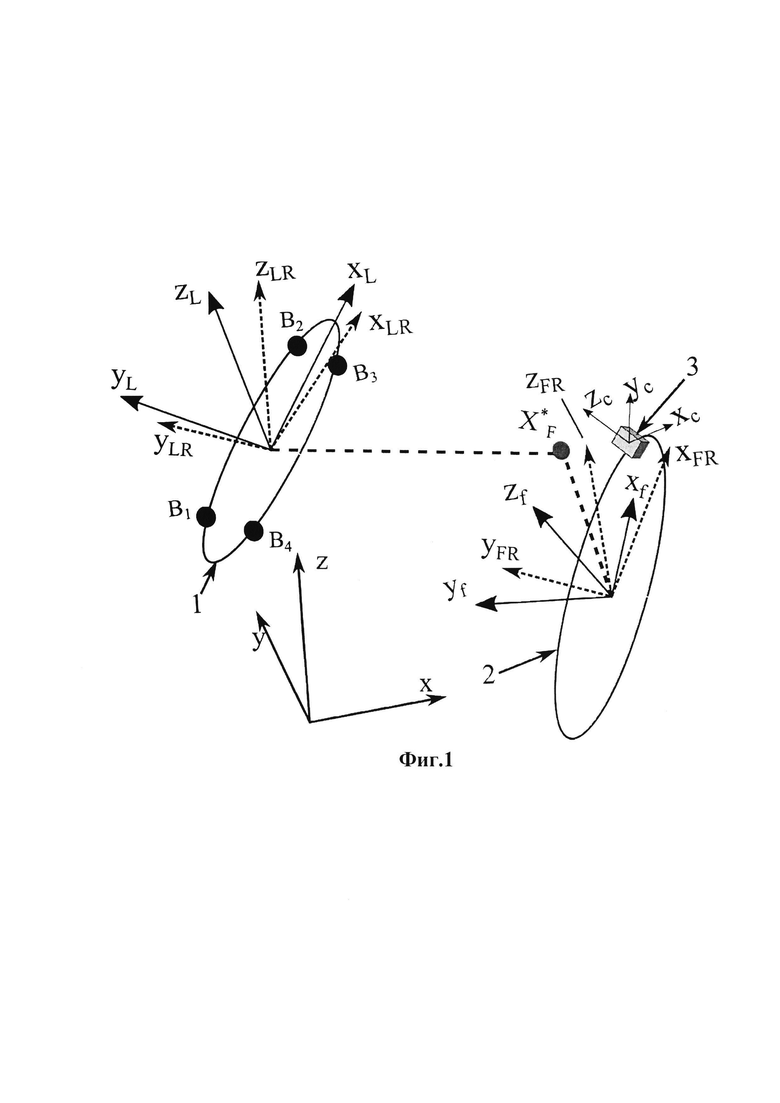
Сущность заявляемого изобретения иллюстрируется чертежом, где на фиг. 1 показана схема движения АНПА-лидера и АНПА-ведомого.
На чертеже введены следующие обозначения: 1 - АНПА - лидер; 2 - подводный аппарат-ведомый; 3 - бортовая видеокамера аппарата-ведомого; xLyLzL - система координат (СК), связанная с АНПА-лидером; xƒyƒzƒ - СК, связанная с АНПА-ведомым; xcyczc - СК, связанная с бортовой видеокамерой АНПА-ведомого; xLRyLRzLR - СК, начало которой совпадает с xLyLzL, а ось zLR параллельна оси z абсолютной системы координат (АСК)х, у, z; xFRyFRzFR - СК, начало которой совпадает с xƒyƒzƒ, а ось zFR параллельна оси zACKx, у, z;  - вектор желаемого положение АНПА-ведомого (целевая точка), заданный в CKxLRyLRzLR; В1, В2, В3, Bn - световые маяки, расположенные на АНПА-лидере.
- вектор желаемого положение АНПА-ведомого (целевая точка), заданный в CKxLRyLRzLR; В1, В2, В3, Bn - световые маяки, расположенные на АНПА-лидере.
Реализация заявленного способа заключается в следующем.
Минимальное количество АНПА в группе равно двум. Один из АНПА назначают лидером, а остальные - ведомыми. Для каждого АНПА -ведомого в группе задается его желаемое положение относительно лидера в CKxLRyLRzLR. Ha корпусе АНПА - лидера устанавливают не менее трех световых маяков. Координаты этих маяков задают в CKxLyLzL и сообщают всем АНПА - ведомым. Каждому АНПА - ведомому устанавливают на борту видеокамеру, в поле зрения которой попадают световые маяки АНПА-лидера.
АНПА-лидерусообщают информацию о заданной траектории движения, и его бортовая система управления обеспечивает его движение вдоль этой траектории в процессе выполнения миссий. АНПА-ведомые перемещают за лидером, сохраняя их заданное положение относительно него в CKxLRyLRzLR. Для этого бортовые видеокамеры формируют изображения, на которых видны световые маяки, установленные на корпусе АНПА-лидера. В зависимости от взаимного расположения АНПА-лидера и соответствующего АНПА - ведомого положение этих световых маяков на изображениях от бортовой камеры ведомого изменяются. Зная параметры бортовых видеокамер, пиксельные координаты световых маяков на непрерывно формируемом изображении, расположение и ориентацию каждой бортовой видеокамеры в CKxƒyƒzƒ c помощью итеративного метода численной оптимизации Ливенберга-Маркгвардта [Т. Strutz "Data FittingandUncertainty. A practical introduction toweightedleasts quares and beyond". 2nd edition, Springer Vieweg, 2016] вычисляют положение и ориентацию АНПА-лидера в СК xƒyƒzƒ. Затем вычисленные положение и ориентацию АНПА-лидера в СК xƒyƒzƒ, координаты желаемого положения конкретного АНПА-ведомого относительно АНПА-лидера в СК xLRyLRzLR и информацию о текущей ориентацию этого конкретного АНПА-ведомого используют для определениякоординат  целевых точек этих ведомых в их СК xFRyFRzFR..
целевых точек этих ведомых в их СК xFRyFRzFR..
Координаты соответствующих целевыхточек в CKxFRyFRzFR подают на вход бортовых систем управления АНПА-ведомых в качестве ошибок по положению. Отрабатывая эти ошибки бортовые системы управления АНПА-ведомыхобеспечивают поддержание заданного положения соответствующего АНПА-ведомого относительно лидера во время движения строем без обмена информацией между АНПА-лидером и АНПА-ведомыми с использованием неэффективных каналов гидроакустической связи.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ СОГЛАСОВАННОГО ДВИЖЕНИЯ НЕСКОЛЬКИХ МОБИЛЬНЫХ РОБОТОТЕХНИЧЕСКИХ ОБЪЕКТОВ | 2024 |
|
RU2833284C1 |
| ИНТЕГРИРОВАННЫЙ КОМПЛЕКС НАВИГАЦИИ И УПРАВЛЕНИЯ ДВИЖЕНИЕМ ДЛЯ АВТОНОМНЫХ НЕОБИТАЕМЫХ ПОДВОДНЫХ АППАРАТОВ | 2011 |
|
RU2483327C2 |
| СИСТЕМА ОХРАНЫ ВОДНОГО РАЙОНА | 2016 |
|
RU2659314C2 |
| СИСТЕМА НАВИГАЦИИ АВТОНОМНОГО НЕОБИТАЕМОГО ПОДВОДНОГО АППАРАТА | 2011 |
|
RU2460043C1 |
| Способ и система для навигационного обеспечения судовождения и определения координат | 2021 |
|
RU2773497C1 |
| Система управления группы автономных необитаемых подводных аппаратов | 2023 |
|
RU2812006C1 |
| СИСТЕМА ОСВЕЩЕНИЯ ПОДВОДНОЙ ОБСТАНОВКИ | 2016 |
|
RU2648546C1 |
| МОБИЛЬНЫЙ ГИДРОАКУСТИЧЕСКИЙ БУЙ-МАЯК И СПОСОБ НАВИГАЦИОННОГО ОБОРУДОВАНИЯ МОРСКОГО РАЙОНА | 2018 |
|
RU2709058C2 |
| Способ навигационной поддержки группы специализированных подводных аппаратов, выполняющих общую миссию в мелководной акватории | 2023 |
|
RU2819199C1 |
| САМОХОДНЫЙ ГИДРОАКУСТИЧЕСКИЙ БУЙ-МАЯК И СПОСОБ НАВИГАЦИОННОГО ОБОРУДОВАНИЯ МОРСКОГО РАЙОНА | 2018 |
|
RU2710831C1 |
Изобретение относится к области робототехники и, в частности, к системам управления согласованным движением группы автономных необитаемых подводных аппаратов (АНПА) в заданном строю. За счет установки на подводном аппарате лидере не менее трех световых маяков и бортовых камер на подводных аппаратах ведомых по изменению положения изображений этих маяков определяют положение лидера относительно ведомых и формируют координаты целевых точек, которые подают на вход бортовых следящих систем управления ведомых, которые, отрабатывая эти входные сигналы, обеспечивают сохранение всеми ведомыми своего места в строю относительно подводного аппарата лидера. Обеспечивается согласованное движение без использования низкоскоростных акустических каналов связи. Реализуется система группового управления строем АНПА за счет эффективного использования в бортовых системах управления АНПА-ведомыми только информации о положении и ориентации АНПА-лидера, которая формируется с помощью источников света АНПА-лидера и бортовых видеокамер АНПА-ведомых. 1 ил.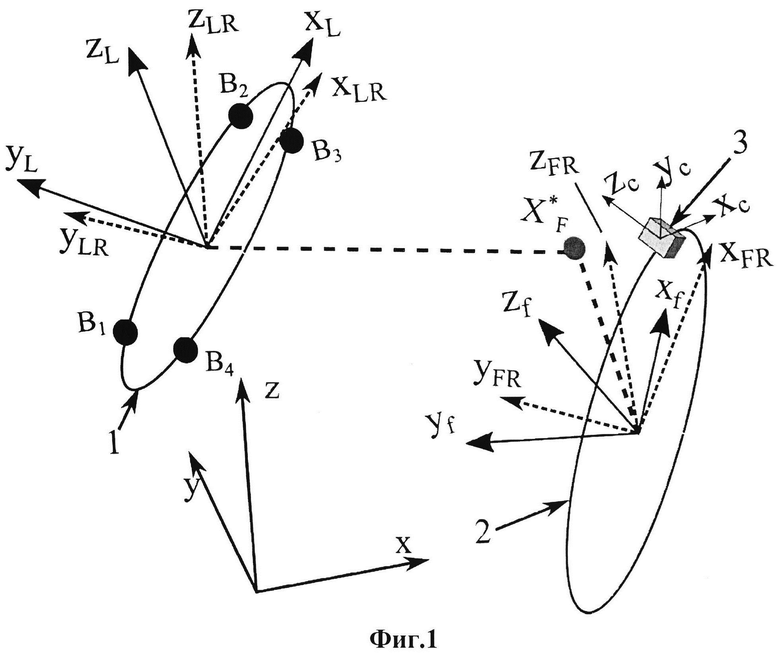
Способ реализации согласованного движения группы автономных необитаемых подводных аппаратов, согласно которому в системе автономного управления подводных аппаратов строем, которая регулирует относительное движение и положение ведомых подводных аппаратов в составе строя и корректирует расстояние между подводным аппаратом лидером и ведомыми подводными аппаратами до достижения требуемых характеристик строя, отличающийся тем, что на подводный аппарат лидер устанавливают не менее трех световых маяков, координаты которых относительно центра масс лидера известны, а на ведомые подводные аппараты устанавливают бортовые видеокамеры, в поле зрения которых находится подводный аппарат лидер и которые в процессе движения группы этих аппаратов формируют изображения и пиксельные координаты световых маяков, установленных на лидере, эти пиксельные координаты и известные исходные координаты световых маяков относительно центра масс лидера сравнивают и используют для определения текущего положения и ориентации подводного аппарата лидера относительно соответствующего ведомого подводного аппарата, это положение и ориентацию лидера используют для нахождения координат целевых точек, определяющих желаемое положение соответствующего ведомого подводного аппарата в заданном строю, сформированные координаты целевых точек подают на входы бортовых следящих систем соответствующих ведомых подводных аппаратов, которые, отрабатывая эти входные сигналы, обеспечивают сохранение всеми подводными аппаратами ведомыми своего места в строю относительно подводного аппарата лидера.
| Способ обсервации подводного аппарата | 2021 |
|
RU2763114C1 |
| СПОСОБ ГРУППОВОЙ ВИДЕОНАВИГАЦИИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2021 |
|
RU2758285C1 |
| Способ управления движением беспилотных автономных транспортных средств (БАТС) и колонн БАТС интеллектуальной транспортной инфраструктурой (ИТИ) автомобильной дороги | 2018 |
|
RU2712487C1 |
| CN 207809733 U, 04.09.2018 | |||
| KR 1020120089977 A, 16.08.2012 | |||
| US 20160244055 A1, 25.08.2016. | |||

