Область техники, к которой относится изобретение
[0001] Изобретение относится к технической области технологии монтажа универсальной машины радарного видеонаблюдения и, в частности, относится к вспомогательному монтажному устройству и способу калибровки угла для универсальной машины радарного видеонаблюдения для дороги.
Уровень техники
[0002] Верхняя часть скоростной автомагистрали (например, монитор движения оснащен вертикальным столбом) или верхняя часть туннеля обычно оснащается всепогодным и круглосуточным обнаружением состояния условий движения скоростной автомагистрали, такого как поток автотранспорта, скорость движения и другие параметры. Для непрерывной оценки состояния движения транспортных средств вдоль скоростной автомагистрали будет размещено определенное количество детекторов. Если расположение или монтажный угол не являются подходящими, могут иметься слепые зоны обнаружения, что приводит к прерывистым данным обнаружения. В предшествующем уровне техники при установке универсальной машины радарного видеонаблюдения для дороги с помощью конструкции установщик заранее устанавливает начальный монтажный угол в соответствии с опытом, а затем выполняет соответствующую регулировку в соответствии с верхним компьютерным изображением универсальной машины радарного видеонаблюдения, которую необходимо неоднократно регулировать, чтобы избежать слепых зон обнаружения. Наконец, соответствующие технические специалисты будут судить, соответствует ли установка требованиям. При соблюдении монтажного угла универсальная машина радарного видеонаблюдения будет установлена и зафиксирована, после чего положение универсальной машины радарного видеонаблюдения не изменяется. Период отладки во время вышеуказанного процесса длительный, процесс установки является трудозатратным, негласное сотрудничество между монтажниками и техническими специалистами является высоким, эффект установки не может быть количественно оценен, и трудно одновременно выполнить требования к эффективности установки и точности установки.
[0003] В предшествующем уровне техники для установки универсальной машины лазерного видения требуется временное закрытие дороги, особенно закрытие туннеля, и необходимо заранее подать заявку в соответствующий отдел управления дорожным движением, а после утверждения необходимо сделать объявление проезжающим социальным транспортным средствам, что занимает много времени, имеет большой диапазон влияния на строительство и может даже вызвать серьезные заторы на дорогах.
[0004] Таким образом, то, как повысить эффективность и точность установки универсальной машины радарного видеонаблюдения для дороги, как количественно оценить параметры и эффекты установки и как уменьшить неблагоприятное воздействие временного закрытия дороги на движение во время процесса монтажа, стало технической проблемой, которая должна быть срочно решена техническими специалистами в этой области.
Раскрытие сущности изобретения
[0005] Для решения вышеуказанных проблем, существующих в предшествующем уровне техники, изобретение предлагает вспомогательное монтажное устройство и способ калибровки угла для универсальной машины радарного видеонаблюдения для дороги.
[0006] Вспомогательное монтажное устройство и способ калибровки угла для универсальной машины радарного видеонаблюдения для дороги включает в себя соединительный элемент, устройство регулировки монтажного угла и лазерное излучающее устройство. При этом нижняя часть соединительного элемента соединена с универсальной машиной радарного видеонаблюдения, верхняя часть соединительного элемента соединена с устройством регулировки монтажного угла, а соединительный элемент специально выполнен с вставкой, причем нижняя часть вставки вставлена в монтажное отверстие универсальной машины радарного видеонаблюдения, верхняя часть вставки соединена с устройством регулировки монтажного угла, а верхняя часть устройства регулировки монтажного угла соединена с лазерным излучающим устройством. Устройство регулировки монтажного угла может образовывать угол лазерного излучающего устройства в вертикальной плоскости.
[0007] Вспомогательное монтажное устройство универсальной машины радарного видеонаблюдения для дороги, описанное в настоящем изобретении, применяется к вспомогательному монтажу универсальной машины радарного видеонаблюдения для дороги путем использования линейных характеристик лазерного луча, излучаемого лазерным излучающим устройством, и, в частности, монтажный угол универсальной машины радарного видеонаблюдения регулируется в соответствии с тем, падает ли положение лазерного пятна, сформированное на поверхности земли, на отмеченное положение. По сравнению с обычным способом настройки в соответствии с заданными параметрами, оно может обеспечить быструю и точную установку и предотвратить использование нескольких универсальных машин радарного видеонаблюдения при работе в сети. После тестирования первоначальный процесс отладки сокращается до менее чем 2 минут. Для дороги длиной около 10 км необходимо установить 30 универсальных машин лазерного видения, а общее время установки может быть сокращено не менее чем на 9 часов, что может в некоторой степени уменьшить неблагоприятное воздействие временного закрытия дорог на движение.
[0008] Вертикальная плоскость, где расположен лазерный луч, излучаемый лазерным излучающим устройством, перпендикулярна передней плоскости универсальной машины радарного видеонаблюдения, а нижняя поверхность устройства регулировки монтажного угла перпендикулярна передней плоскости универсальной машины радарного видеонаблюдения и вертикальной плоскости, где лазерный луч расположен во время регулировки угла наклона монтажного угла универсальной машины радарного видеонаблюдения.
[0009] Предпочтительно монтажное отверстие представляет собой отверстие для рассеивания тепла универсальной машины радарного видеонаблюдения, а верхняя часть универсальной машины радарного видеонаблюдения снабжена множеством отверстий для рассеивания тепла для внутренних электронных компонентов рассеивания тепла, а вставные элементы вставлены в отверстия для рассеивания тепла.
[0010] Вставной элемент содержит плоскую пластину и штифт, которые соединены друг с другом, и штифт сопряжен с монтажным отверстием. В процессе изготовления вставного элемента плоская пластина и штифт могут иметь объединенную конструкцию или съемную соединительную конструкцию, а вставной элемент изготовлен из светочувствительной смолы, но также могут быть использованы другие пластиковые гибкие материалы.
[0011] Универсальная машина радарного видеонаблюдения для дороги содержит переднюю плоскость, боковую плоскость, монтажные отверстия и нижнюю опорную раму, при этом камера установлена на передней плоскости универсальной машины радарного видеонаблюдения; причем два конца нижней опорной рамы шарнирно закреплены на боковой плоскости универсальной машины радарного видеонаблюдения; а в центре нижней части нижней опорной рамы расположен фланец, причем фланец вращательно и неподвижно соединен с монтажным основанием.
[0012] Монтажное основание снабжено винтом регулировки угла тангажа и вторым крепежным винтом, причем второй крепежный винт используется для фиксации положений различных компонентов монтажного основания, а винт регулировки угла тангажа используется для фиксации положения тангажа универсальной машины радарного видеонаблюдения после того, как для универсальной машины радарного видеонаблюдения были соблюдены требования к установке.
[0013] Предпочтительно, устройство регулировки монтажного угла представляет собой регулировочный кронштейн, причем регулировочный кронштейн содержит верхний регулировочный кронштейн и нижний регулировочный кронштейн. Оба из верхнего регулировочного кронштейна и нижнего регулировочного кронштейна имеют U-образную форму, причем верхний регулировочный кронштейн и нижний регулировочный кронштейн шарнирно соединены через первый крепежный винт, а одна сторона нижнего регулировочного кронштейна снабжена дугообразной канавкой, и через дугообразную канавку проходит стопорный винт для фиксации верхнего регулировочного кронштейна. Первый крепежный винт и стопорный винт могут фиксировать повернутое положение устройства регулировки монтажного угла, причем нижний регулировочный кронштейн закреплен на плоской пластине, и на плоской пластине расположен датчик уровня, причем датчик уровня используется для определения горизонтальности верхней плоскости плоской пластины, то есть определения, равен ли угол крена универсальной машины радарного видеонаблюдения 0°, а затем определения, установлена ли универсальная машина радарного видеонаблюдения горизонтально.
[0014] Предпочтительно, устройство регулировки монтажного угла также может иметь поворотный механизм, причем верхняя часть поворотного механизма соединена с лазерным излучающим устройством, а нижняя часть поворотного механизма соединена с плоской пластиной, и путем использования поворотного механизма может быть реализовано электронное управление поворотом лазерного излучающего устройства.
[0015] Предпочтительно, датчик уровня использует пузырек уровня, и то, является ли плоская пластина горизонтальной или нет, определяется в соответствии с пузырьками в середине пузырька уровня. Преимущество использования пузырька уровня заключается в том, что он имеет низкую цену, а ровность может соответствовать точности регулировки угла тангажа монтажного основания.
[0016] Одна или обе стороны верхнего регулировочного кронштейна также снабжены шкалами, распределенными в форме дуги, а нижний регулировочный кронштейн снабжен указателями, соответствующими шкалам, и шкалы используются для указания угла тангажа монтажного основания.
[0017] Лазерное излучающее устройство содержит корпус устройства выравнивания, источник лазера и проводку, причем передняя часть корпуса устройства выравнивания соединена с источником лазера, а задняя часть корпуса устройства выравнивания соединена с проводкой, и проводка соединена с внешним источником питания.
[0018] Монтажное основание содержит верхний U-образный элемент, седловидный соединительный элемент и нижний U-образный элемент, причем верхний U-образный элемент и седловидный соединительный элемент закреплены множеством винтов регулировки угла тангажа и вторых крепежных винтов; нижний U-образный элемент и седловидный соединительный элемент закреплены множеством винтов регулировки угла крена и вторых крепежных винтов, левая и правая стороны седловидного соединительного элемента снабжены первыми дугообразными канавками для вставки винтов регулировки угла крена; передняя и задняя стороны седловидного соединительного элемента снабжены вторыми дугообразными канавками, а винты регулировки угла тангажа вставлены во вторые дугообразные канавки; верхняя поверхность верхнего U-образного элемента снабжена множеством третьих дугообразных канавок, и третьи дугообразные канавки используются для соединения винтов регулировки угла рыскания.
[0019] Для дальнейшего решения вышеуказанных проблем предшествующего уровня техники на основе вышеупомянутого вспомогательного монтажного устройства универсальной машины радарного видеонаблюдения для дороги в настоящем изобретении предложен способ калибровки монтажного угла универсальной машины радарного видеонаблюдения для дороги.
[0020] Установка и регулировка универсальной машины радарного видеонаблюдения для дороги имеют последовательность: во-первых, регулируют угол крена; после того, как регулировка положения угла крена завершена, фиксируют его положение, затянув винт регулировки угла крена; затем регулируют угол рыскания, и после того, как регулировка угла рыскания завершена, фиксируют отрегулированное положение рыскания, затягивая винт регулировки угла рыскания; наконец, регулируют угол тангажа, и после того, как регулировка угла тангажа завершена, фиксируют отрегулированное положение тангажа, затягивая винт регулировки угла тангажа. Возьмем в качестве примера систему осей XYZ трехмерной прямоугольной системы координат, угол крена - это угол поворота универсальной машины радарного видеонаблюдения в плоскости YZ (тангенциальный вертикальный наклон), угол тангажа - это угол поворота универсальной машины радарного видеонаблюдения в плоскости XZ (поперечный вертикальный наклон), а угол рыскания - это угол поворота универсальной машины радарного видеонаблюдения в плоскости XY (горизонтальная плоскость).
[0021] Изобретение также включает в себя способ калибровки монтажного угла универсальной машины радарного видеонаблюдения для дороги, который используется для вспомогательного монтажного устройства универсальной машины радарного видеонаблюдения для дороги, и способ содержит следующие этапы:
[0022] Этап SS1: на этапе предварительной калибровки механический рычаг монтажной тележки поднимает установщика в положение, предназначенное для установки, и установщик вставляет вспомогательное монтажное устройство в отверстие для рассеивания тепла универсальной машины радарного видеонаблюдения. В то же время командир на земле принимает точку B проекции непосредственно под универсальной машиной радарного видеонаблюдения и высоту H установки в качестве опорной точки и использует геометрическую зависимость между характеристическим углом универсальной машины 1 радарного видеонаблюдения и высотой H установки для определения кратчайшего расстояния L1, тестового расстояния L2, расстояния L2 от радара на осевой линии дороги.
[0023] Этап SS2: регулируют угол крена и поворачивают универсальную машину радарного видеонаблюдения. Когда индикатор уровня указывает на горизонтальное состояние, это означает, что монтажное основание также находится в горизонтальном положении, и установщик затягивает винт регулировки угла крена.
[0024] Этап SS3: регулируют угол рыскания и угол тангажа, поворачивают регулировочный кронштейн или поворотный механизм вверх и вниз, чтобы лазерный луч был перпендикулярен передней плоскости универсальной машины радарного видеонаблюдения, и поворачивают универсальную машину радарного видеонаблюдения влево и вправо, чтобы лазерный луч, излучаемый лазерным излучающим устройством, падал в точке D на осевой линии дороги, затем регулируют угол рыскания и угол тангажа и затягивают винт регулировки угла рыскания и винт регулировки угла тангажа.
[0025] Этап SS4: извлекают вспомогательное монтажное устройство из излучающего отверстия универсальной машины радарного видеонаблюдения, перемещают монтажную тележку к передней части конструкции, калибруют монтажный угол следующей универсальной машины радарного видеонаблюдения и повторяют этапы SS1-SS3.
[0026] Предпочтительно, если поворотный механизм используется для регулировки монтажного угла, перед завершением этапа SS2 и переходом к этапу SS3 установщик должен ввести угол регулировки, который включает в себя угол рыскания и угол тангажа. Центральный контроллер управляет поворотным механизмом для поворота вверх и вниз в соответствии с введенным углом рыскания и в то же время поворачивает универсальную машину радарного видеонаблюдения влево и вправо в соответствии с введенным углом рыскания, так что лазерный луч может сканировать осевую линию дороги.
[0027] При совместной работе установщика и командира калибровка угла универсальной машины радарного видеонаблюдения может повысить точность и эффективность установки универсальной машины радарного видеонаблюдения. По сравнению с предшествующим уровнем техники точность установки выше, а этап установки и отладки с предыдущих 10 минут может быть сокращен до 2 минут. Для участка дороги или тоннеля экономия времени значительна. Например, для участка дороги протяженностью 10 км можно сэкономить как минимум время установки и отладки.
[0028] Кроме того, предпочтительно, после выполнения этапов SS1-SS4 способ калибровки монтажного угла универсальной машины радарного видеонаблюдения дополнительно содержит этап SS5 извлечения вспомогательного монтажного устройства из монтажного отверстия универсальной машины радарного видеонаблюдения, перемещения монтажной тележки к передней части конструкции, калибровки монтажного угла следующей универсальной машины радарного видеонаблюдения и повторного выполнения этапов SS1-SS4.
[0029] Подводя итог, по сравнению с предшествующим уровнем техники, вспомогательное монтажное устройство и способ калибровки угла универсальной машины радарного видеонаблюдения для дороги имеют следующие преимущества.
[0030] 1) В соответствии с линейными характеристиками лазерного луча изобретение регулирует монтажный угол универсальной машины лазерного видения в соответствии с тем, падает ли положение лазерного пятна, образованного лазерным лучом на земле, на отмеченное положение. По сравнению с традиционным способом регулировки в соответствии с заданными параметрами, оно может обеспечить быструю и точную установку и предотвратить обнаружение слепых зон смежной универсальной машиной лазерного видения из-за неправильных монтажных углов.
[0031] 2) Поскольку охлаждающее отверстие относится к неотъемлемой структуре универсальной машины радарного видеонаблюдения, оно расположено перпендикулярно верхней плоскости универсальной машины радарного видеонаблюдения, а вставка вставлена в охлаждающее отверстие универсальной машины радарного видеонаблюдения, так что положение вспомогательного монтажа может быть зафиксировано с использованием структурных характеристик самой универсальной машины радарного видеонаблюдения без дополнительных независимых крепежных устройств.
[0032] 3) Вставной элемент согласно настоящему изобретению изготовлен из полимерного материала методом литья под давлением расплава, благодаря чему может осуществляться быстрая вставка и замена, и все тот же тип универсальных машин радарного видеонаблюдения для дороги может быть установлен путем использования вспомогательного монтажного устройства.
[0033] 4) В изобретении используется монтажная тележка для установки универсальной машины радарного видеонаблюдения для дороги, и два человека (а именно установщик и командир) сотрудничают для выполнения работы; установщик регулирует универсальную машину радарного видеонаблюдения и вспомогательное монтажное устройство на одном конце механического рычага монтажной тележки, а командир отмечает точку проекции на центральной линии дороги и направляет установщика для калибровки угла в соответствии с положением лазерного пятна на земле, чтобы можно было улучшить монтажный угол и точность установки универсальной машины радарного видеонаблюдения для дороги.
[0034] 5) Что касается процесса монтажа универсальной машины радарного видеонаблюдения, то за счет усовершенствования предшествующего уровня техники этап установки и отладки универсальной машины радарного видеонаблюдения для дороги сокращен с 10 минут, как было раньше, до 2 минут. При большой протяженности шоссе время установки и отладки, сэкономленное за счет использования технической схемы изобретения, также является значительным, что в определенной степени смягчает неблагоприятное влияние временного закрытия дороги на движение.
Краткое описание чертежей
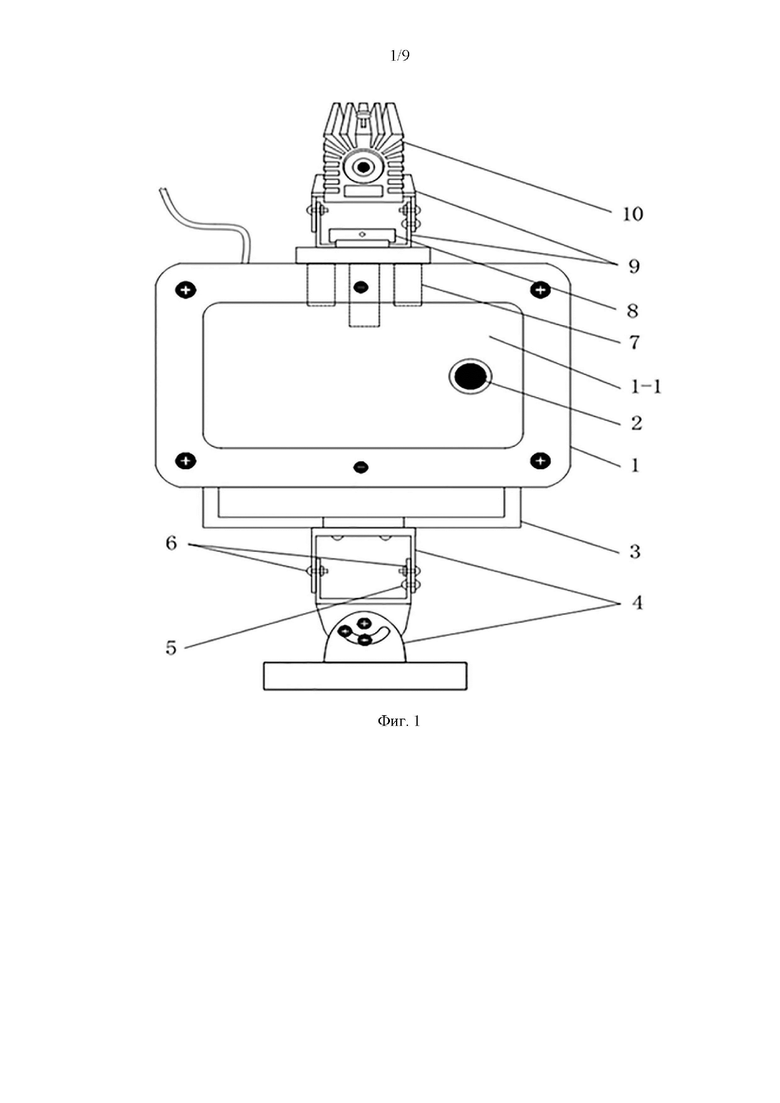
[0035] На фиг. 1 показан вертикальный вид с торца вспомогательного монтажного устройства универсальной машины радарного видеонаблюдения для дороги.
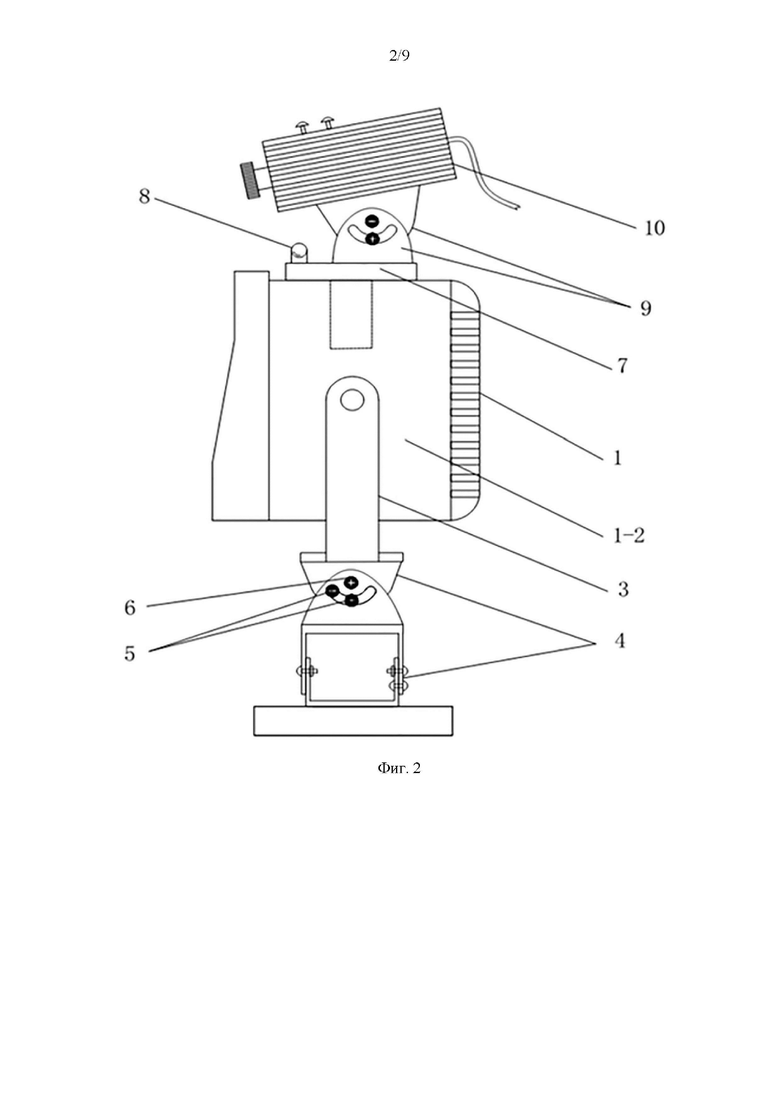
[0036] На фиг. 2 показан вид сбоку положения вспомогательного монтажного устройства универсальной машины радарного видеонаблюдения для дороги.
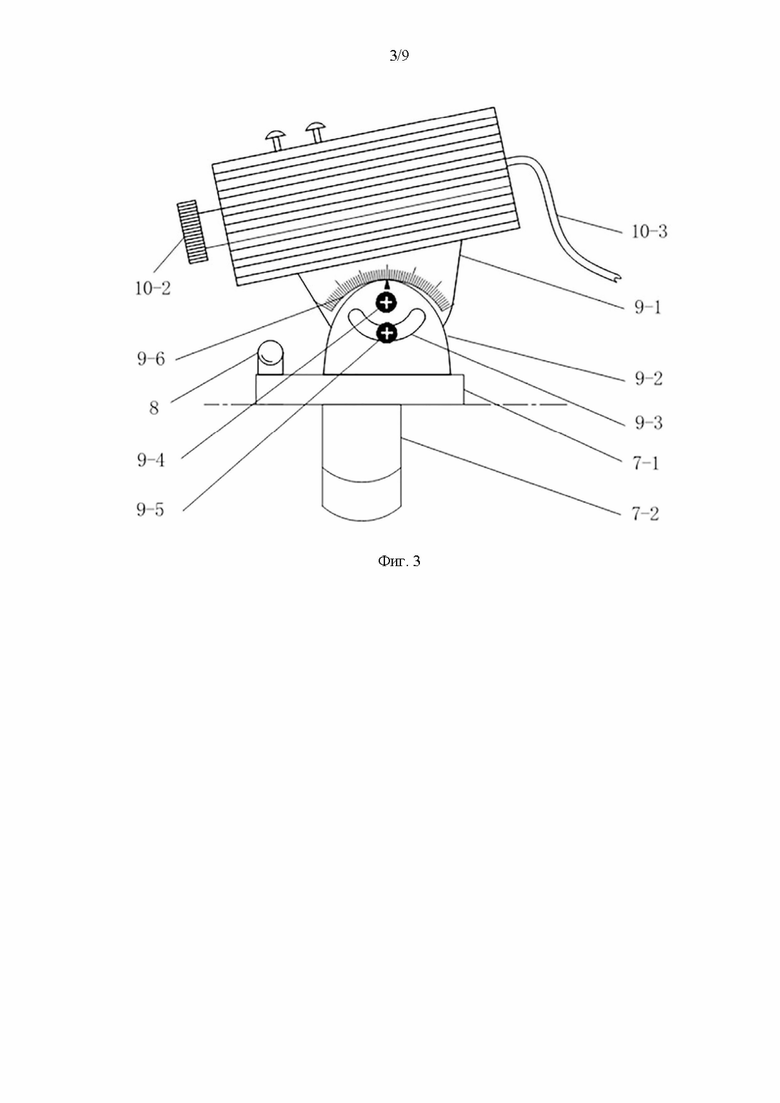
[0037] На фиг. 3 показан вид сбоку конструкции вспомогательного монтажного устройства в соответствии с вариантом осуществления настоящего изобретения.
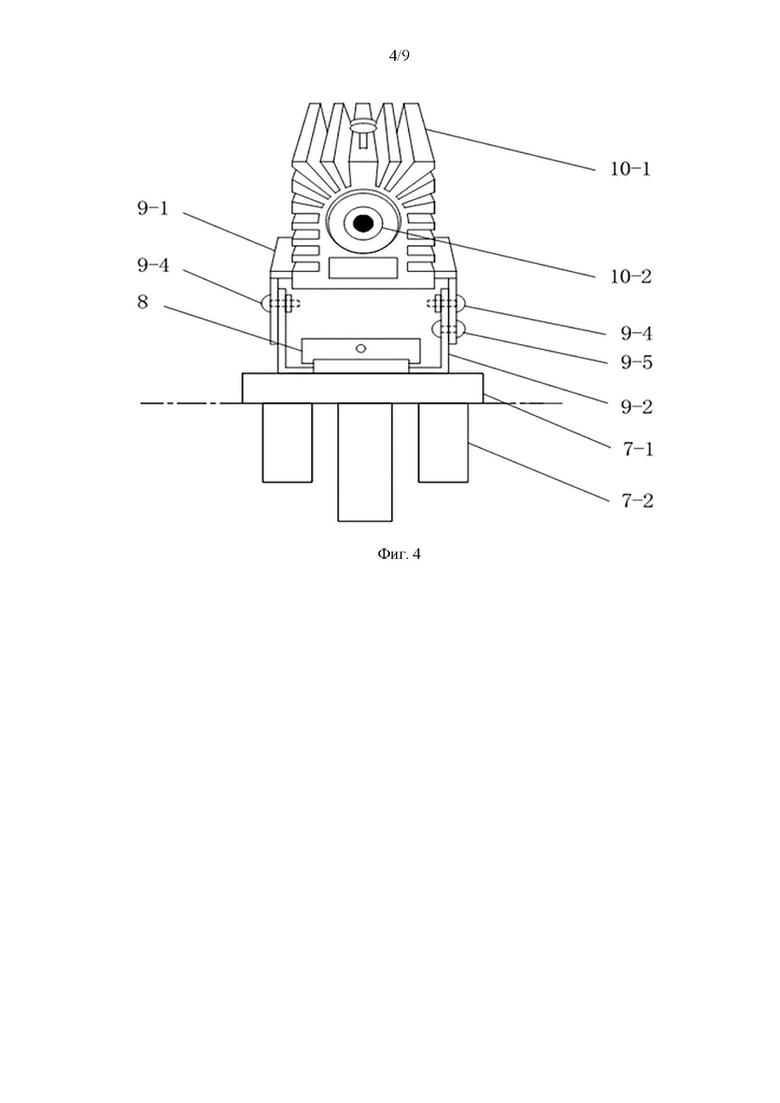
[0038] На фиг. 4 показан вид спереди конструкции вспомогательного монтажного устройства в соответствии с вариантом осуществления настоящего изобретения.
[0039] На фиг. 5 показан вид сбоку регулировки лазерного излучающего устройства в соответствии с другим вариантом осуществления настоящего изобретения.
[0040] На фиг. 6 показан вид спереди конструкции вспомогательного монтажного устройства в соответствии с другим вариантом осуществления настоящего изобретения.
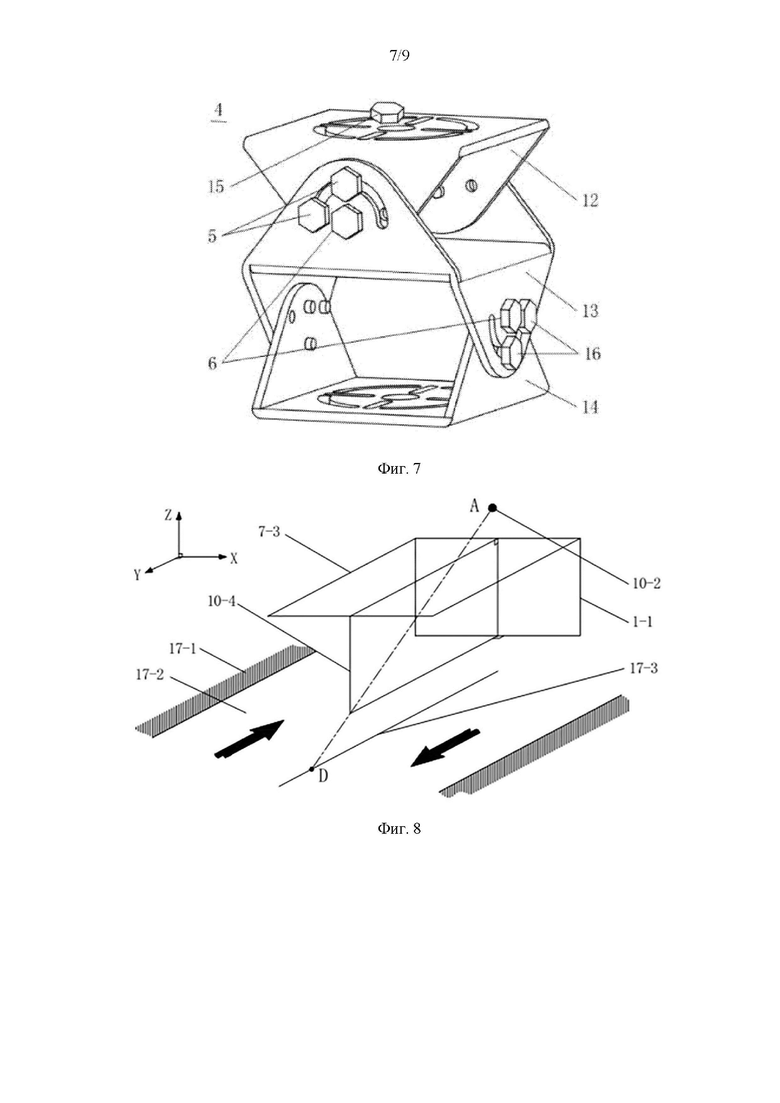
[0041] На фиг. 7 показана принципиальная схема трехмерной конструкции монтажного основания универсальной машины радарного видеонаблюдения согласно настоящему изобретению.
[0042] На фиг. 8 показана трехмерная принципиальная схема способа калибровки угла универсальной машины радарного видеонаблюдения для дороги.
[0043] На фиг. 9 показан схематический вид в плане способа калибровки угла универсальной машины радарного видеонаблюдения для дороги.
[0044] На фиг. 10 показана принципиальная схема калибровки угла универсальной машины радарного видеонаблюдения для дороги.
[0045] На фиг. 11 показана принципиальная схема схемы соединения поворотного механизма универсальной машины радарного видеонаблюдения для дороги.
[0046] На фиг. 12 показана блок-схема управления поворотным механизмом и установки универсальной машины радарного видеонаблюдения для дороги.
[0047] На фигурах, 1 - универсальная машина радарного видеонаблюдения; 2 - камера; 3 - нижняя опорная рама; 4 - монтажное основание; 5 - винт регулировки угла тангажа; 6 - второй крепежный винт; 7 - вставной элемент; 8 - датчик уровня; 9 - регулировочный кронштейн; 10 - лазерное излучающее устройство; 11 - поворотный механизм; 12 - верхний U-образный элемент; 13 - седловидный соединительный элемент; 14 - нижний U-образный элемент; 15 - винт регулировки угла рыскания; 16 - винт регулировки угла крена;
[0048] 1-1 - передняя плоскость; 1-2 - боковая плоскость;
[0049] 7-1 - плоская пластина; 7-2 - штифт; 7-3 - верхняя плоскость плоской пластины;
[0050] 9-1 - верхний регулировочный кронштейн; 9-2 - нижний регулировочный кронштейн; 9-3 - дугообразная канавка; 9-4 - первый крепежный винт; 9-5 - стопорный винт; 9-6 - шкала;
[0051] 10-1 - корпус устройства выравнивания; 10-2 - лазерный источник; 10-3 - проводка; 10-4 - вертикальная плоскость;
[0052] 11-1 - корпус поворотного механизма; 11-2 - верхний дверной элемент; 11-3 - нижний дверной элемент;
[0053] 17-1 - земляное полотно; 17-2 - покрытие; 17-3 - осевая линия дороги.
Осуществление изобретения
[0054] Чтобы сделать назначение, техническую схему и преимущества конкретного варианта осуществления настоящего изобретения более ясными, будет ясно и полностью описана техническая схема в конкретном варианте осуществления настоящего изобретения с прилагаемыми чертежами. Очевидно, что описанный конкретный вариант осуществления является частью варианта осуществления настоящего изобретения, но не всем вариантом осуществления. На основании конкретного варианта осуществления настоящего изобретения все другие варианты осуществления, полученные обычными специалистами в данной области без творческого усилия, относятся к объему правовой охраны настоящего изобретения.
[0055] Вариант осуществления 1
[0056] См. фиг. 1 - фиг. 4 и фиг. 7 - фиг. 8. Вспомогательное установочное устройство для универсальной машины радарного видеонаблюдения содержит соединительный элемент, устройство регулировки монтажного угла и лазерное излучающее устройство 10. В этом варианте осуществления соединительный элемент использует вставной элемент 7, нижняя часть вставного элемента 7 вставляется в охлаждающее отверстие универсальной машины 1 радарного видеонаблюдения, верхняя часть вставного элемента 7 прикреплена к устройству регулировки монтажного угла, а верхняя часть устройства регулировки монтажного угла прикреплена к лазерному излучающему устройству 10. Устройство регулировки монтажного угла поворачивает лазерное излучающее устройство 10 в вертикальной плоскости 10-4.
[0057] Универсальная машина 1 радарного видеонаблюдения для дороги содержит переднюю плоскость 1-1, боковую плоскость 1-2 универсальной машины 1 радарного видеонаблюдения, отверстия для рассеивания тепла и нижнюю опорную раму 3. На передней плоскости 1-1 универсальной машины 1 радарного видеонаблюдения установлена камера 2, оба конца нижней опорной рамы 3 шарнирно прикреплены к боковой плоскости 1-2 универсальной машины 1 радарного видеонаблюдения, а в центре нижней части нижней опорной рамы 3 размещен фланец, который вращательно и неподвижно соединен с монтажным основанием 4.
[0058] Вставной элемент 7 содержит плоскую пластину 7-1 и множество штифтов 7-2, причем штифты 7-2 вертикально соединены с плоской пластиной 7-1. В процессе изготовления вставного элемента 7 плоская пластина 7-1 и штифты 7-2 могут быть изготовлены литьем под давлением, а вставной элемент 7 изготовлен из светочувствительной смолы, но также могут быть использованы другие пластиковые гибкие материалы.
[0059] Монтажное основание 4 снабжено винтом 5 регулировки угла тангажа и вторым крепежным винтом 6. Второй крепежный винт 6 используется для фиксации положений различных компонентов монтажного основания 4. Винт 5 регулировки угла тангажа используется для фиксации положения тангажа универсальной машины 1 радарного видеонаблюдения после того, как для универсальной машины 1 радарного видеонаблюдения были соблюдены требования к установке.
[0060] Устройство регулировки монтажного угла представляет собой, в частности, регулировочный кронштейн 9, который содержит верхний регулировочный кронштейн 9-1 и нижний регулировочный кронштейн 9-2. Как верхний регулировочный кронштейн 9-1, так и нижний регулировочный кронштейн 9-2 имеют U-образную форму, и обе стороны нижнего регулировочного кронштейна 9-2 шарнирно прикреплены к верхнему регулировочному кронштейну 9-1 через первый крепежный винт 9-4, а одна сторона нижнего регулировочного кронштейна 9-2 снабжена дугообразной канавкой 9-3. Стопорный винт 9-5 вставляется в дугообразную канавку 9-3 для фиксации положения устройства регулировки монтажного угла после его поворота. Нижняя поверхность нижнего регулировочного кронштейна 9-2 закреплена на плоской пластине 7-1, а датчик 8 уровня расположен горизонтально на плоской пластине 7-1 для обнаружения горизонтальности нижнего регулировочного кронштейна 9-2, чтобы определить установочную горизонтальность универсальной машины 1 радарного видеонаблюдения.
[0061] Датчик 8 уровня также может быть заменен пузырьком уровня, и горизонтальность верхней плоскости 7-3 плоской пластины может быть определена пузырьками в пузырьке уровня.
[0062] Одна сторона или обе стороны верхнего регулировочного кронштейна 9-1 также снабжены шкалами 9-6, распределенными в форме дуги, а верхняя часть одной стороны нижнего регулировочного кронштейна 9-2 снабжена указателем, соответствующим шкалам 9-6. Когда регулировочный кронштейн 9 поворачивается, чтобы лазерный луч, излучаемый лазерным излучающим устройством 10, был перпендикулярен передней плоскости 1-1 универсальной машины 1 радарного видеонаблюдения, затягивают стопорный винт 9-5. При определении того, является ли он вертикальным, это определяют по шкале 9-6, обозначенной указателем. Когда шкала 9-6, указанная указателем, достигает 90 градусов, это означает, что лазерный луч перпендикулярен передней плоскости 1-1, чтобы зафиксировать положение лазерного излучающего устройства 10 относительно передней плоскости 1-1. Однако, когда лазерное излучающее устройство 10 поворачивается вокруг первого крепежного винта 9-4, обычно нет необходимости, чтобы лазерный луч был перпендикулярен передней плоскости 1-1, и блокировка положения в это время не выполняется.
[0063] Лазерное излучающее устройство 10 содержит корпус 10-1 устройства выравнивания, источник 10-2 лазера и проводку 10-3, причем передняя часть корпуса 10-1 устройства выравнивания соединена с источником 10-2 лазера, а задняя часть корпуса 10-1 устройства выравнивания соединена с проводкой 10-3, а проводка 10-3 соединена с внешним источником питания.
[0064] Боковая поверхность лазерного излучающего устройства 10 параллельна боковой поверхности верхнего регулировочного кронштейна 9-1/ нижнего регулировочного кронштейна 9-2. В процессе регулировки угла тангажа монтажного основания 4 универсальной машины 1 радарного видеонаблюдения вертикальная плоскость 10-4, в которой расположен лазерный луч, излучаемый источником 10-2 лазера, всегда должна быть перпендикулярна передней плоскости 1-1 универсальной машины 1 радарного видеонаблюдения, и в то же время нижняя поверхность устройства регулировки монтажного угла перпендикулярна передней плоскости 1-1 универсальной машины 1 радарного видеонаблюдения.
[0065] Монтажное основание 4 содержит верхний U-образный элемент 12, седловой соединительный элемент 13 и нижний U-образный элемент 14. Верхний U-образный элемент 12 соединен с седловидным соединительным элементом 13 через винт 5 регулировки угла тангажа и второй крепежный винт 6, а нижний U-образный элемент 14 соединен с седловидным соединительным элементом 13 через винт 16 регулировки угла крена и второй крепежный винт 6. Левая и правая стороны седловидного соединительного элемента 13 снабжены первыми дугообразными канавками для монтажа. Передняя и задняя стороны седловидного соединительного элемента 13 снабжены вторыми дугообразными канавками, и во вторых дугообразных канавках установлены винты 5 регулировки угла тангажа. После определения угла тангажа фиксируют положение отрегулированного тангажа путем затягивания винтов 5 регулировки угла тангажа. Верхняя поверхность верхней U-образной части 12 снабжена множеством третьих дугообразных канавок для соединения винтов 15 регулировки угла рыскания, и после определения угла рыскания отрегулированное направляющее положение фиксируется путем затягивания винтов 15 регулировки угла рыскания.
[0066] На монтажном основании 4 может быть расположено множество винтов 5 регулировки угла тангажа, винтов 15 регулировки угла рыскания и винтов 16 регулировки угла крена, и может быть присоединено множество винтов регулировки одного и того же типа, так что соотношение относительного соединения компонентов монтажного основания 4 может быть более стабильным.
[0067] Вариант осуществления 2
[0068] Этот вариант осуществления отличается от варианта осуществления 1 только конструкцией устройства регулировки монтажного угла. См. фиг. 5 - фиг. 6. В этом варианте осуществления устройство регулировки монтажного угла использует поворотный механизм 11, верхняя часть которого соединена с лазерным излучающим устройством 10, а нижняя часть соединена с плоской пластиной 7-1.
[0069] Рулевой механизм 11 содержит корпус 11-1 поворотного механизма, верхний дверной элемент 11-2, нижний дверной элемент 11-3 и источник питания, причем верхний дверной элемент 11-2 шарнирно соединен с верхней частью корпуса 11-1 поворотного механизма, а нижний дверной элемент 11-3 соединен с плоской пластиной 7-1.
[0070] Как показано на фиг. 11, настоящее изобретение также включает в себя систему управления регулировкой поворотного механизма. Поворотный механизм 11 электрически соединен с центральным контроллером, который соединен с лазерным излучающим устройством 10. Центральный контроллер расположен на плоской панели 7-1, при этом центральный контроллер может представлять собой однокристальный компьютер. Центральный контроллер также соединен с блоком ввода ключа и дисплейным блоком соответственно. Цепь источника питания используется для подачи питания на центральный контроллер, поворотный механизм 11 и лазерное излучающее устройство 10, а дисплейный блок, в частности, представляет собой дисплейный блок OLED.
[0071] Блок ввода ключа используется установщиком для ввода угла регулировки, а поворотом поворотного механизма 11 управляют путем ввода угла регулировки, то есть вводится монтажный угол (угол тангажа или угол рыскания) универсальной машины 1 радарного видеонаблюдения, а дисплейный блок OLED используется для отображения введенного угла регулировки.
[0072] Вариант осуществления 3
[0073] Настоящее изобретение также включает в себя способ калибровки монтажного угла универсальной машины лазерного видения. См. фиг. 8 - фиг. 10. На основании варианта осуществления 1 или варианта осуществления 2, передняя плоскость 1-1 универсальной машины 1 радарного видеонаблюдения выбирается в качестве опорной плоскости, а вертикальная плоскость 10-4, перпендикулярная опорной плоскости, строится с использованием лазерного луча для обеспечения того, чтобы вертикальная плоскость 10-4 всегда пересекалась с осевой линией 17-3 дороги. Это гарантирует, что центральная плоскость пучка излучения универсальной машины 1 радарного видеонаблюдения находится на дороге впереди.
[0074] В соответствии со свойствами универсальной машины 1 радарного видеонаблюдения, ∠CAE = угол θ2 облучения является постоянным значением, которое принадлежит неотъемлемому свойству дальности видимости универсальной машины 1 радарного видеонаблюдения ∠CAD = половинный угол облучения θ1=θ2/2, а высота установки универсальной машины 1 радарного видеонаблюдения равна H=AB (где точка A - точка положения излучения луча универсальной машины 1 радарного видеонаблюдения, которая расположена непосредственно над точкой B, а AB перпендикулярна горизонтальной плоскости), которая может быть измерена с помощью рулетки. Кроме того, как показано на фиг. 8, при маркировке точек на земле, самое дальнее расстояние (то есть расстояние между универсальной машиной 1 радарного видеонаблюдения и обнаруженной целью) L3 представляет собой линейное расстояние между точкой B проекции универсальной машины 1 радарного видеонаблюдения (точка проекции непосредственно под универсальной машиной 1 радарного видеонаблюдения) и самой дальней точкой C волны излучения (самое дальнее положение, которое может контролировать универсальная машина 1 радарного видеонаблюдения). Ближайшее расстояние L1 представляет собой линейное расстояние между точкой B и ближайшей точкой E волны излучения (ближайшее положение, которое может контролироваться универсальной машиной 1 радарного видеонаблюдения), тестовое расстояние L2 представляет собой линейное расстояние между точкой B и центральной точкой D волны излучения (пересечение центральной линии главного лепестка пучка излучения и центральной линии 17-3 дороги), L1, L2 и L3 могут быть измерены с помощью рулетки, а AD представляет собой центральную линию главного лепестка пучка излучения универсальной машины 1 радарного видеонаблюдения. Характеристические углы облучения включают в себя половинный угол θ1 облучения, угол θ2 облучения и максимальный угол θ3 тангажа, все из которых определяются характеристиками универсальной машины 1 радарного видеонаблюдения. Следовательно, θ1, θ2 и θ3 являются постоянными значениями, L1, L2, L3, θ4 и θ5 могут быть вычислены из θ1, θ2, θ3 и высоты H, а конкретный метод расчета показан в уравнениях (1)-(5):
[0075] BC = L3 = Htan (θ3)

θ4 = π/2 + θ1
θ5 = π/2 + θ1
[0076] В уравнениях (4)-(5) θ4 представляет собой первый угол тангажа, θ4 представляет собой включенный угол между ближайшим расстоянием L1 обнаружения и передней плоскостью 1-1 универсальной машины 1 радарного видеонаблюдения, θ5 представляет собой второй угол тангажа, и θ5 представляет собой включенный угол между самым дальним расстоянием L3 обнаружения и передней плоскостью 1-1 универсальной машины 1 радарного видеонаблюдения.
[0077] См. фиг. 7 - фиг. 9. При калибровке фактического угла универсальной машины 1 радарного видеонаблюдения отмечены соответственно точки E, D и C, которые находятся на расстояниях L1, L2 и L3 от слепой зоны универсальной машины 1 радарного видеонаблюдения на осевой линии 17-3 дороги и точки B проекции непосредственно под универсальной машиной 1 радарного видеонаблюдения. Угол крена регулируется датчиком 8 уровня, а θ1 поворачивается в плоскости XZ. Когда датчик 8 уровня показывает уровень, это означает, что угол крена был откалиброван. После завершения регулировки угла крена регулируются угол рыскания и угол тангажа θ1. Поскольку универсальная машина 1 радарного видеонаблюдения неподвижно соединена с регулировочным кронштейном 9 (или поворотным механизмом 11), когда θ1 поворачивается, регулировочный кронштейн 9 (или поворотный механизм 11) приводит в синхронное вращение лазерное излучающее устройство 10. Поскольку точка D является пересечением осевой линии основного лепестка пучка излучения и осевой линии 17-3 пути, точка A является точкой положения излучения пучка универсальной машины 1 радарного видеонаблюдения, а положения точек A и D фиксированы, когда лазерный луч перпендикулярен передней плоскости 1-1 θ1 и проецируется в точку D, это означает, что как угол рыскания, так и угол тангажа универсальной машины 1 радарного видеонаблюдения были отрегулированы. В это время затягивают винт 15 регулировки угла рыскания и винт 5 регулировки угла тангажа, чтобы завершить калибровку угла рыскания и угла тангажа.
[0078] Способ калибровки монтажного угла универсальной машины радарного видеонаблюдения содержит следующие конкретные этапы.
[0079] Этап SS1: на этапе предварительной калибровки механический рычаг монтажной тележки поднимает установщика в положение, предназначенное для установки, и установщик вставляет вспомогательное монтажное устройство в охлаждающее отверстие универсальной машины 1 радарного видеонаблюдения. В то же время командир на земле принимает точку B проекции непосредственно под универсальной машиной 1 радарного видеонаблюдения и высоту H установки в качестве опорной и использует геометрическую зависимость между характеристическим углом и высотой H установки универсальной машины 1 радарного видеонаблюдения. Отмечают точки E, D и C, ближайшее расстояние L1, тестовое расстояние L2 и самое дальнее расстояние L3 от универсальной машины 1 радарного видеонаблюдения на осевой линии 17-3 дороги и точку B проекции непосредственно под универсальной машиной 1 радарного видеонаблюдения.
[0080] Этап SS2: регулируют угол крена и поворачивают универсальную машину 1 радарного видеонаблюдения. Когда датчик 8 уровня указывает на горизонтальное состояние, это означает, что монтажное основание 4 также находится в горизонтальном положении, и установщик затягивает винт 16 регулировки угла крена;
[0081] Этап SS3: регулируют угол рыскания и угол тангажа, поворачивают регулировочный кронштейн 9 или поворотный механизм 11 вверх и вниз, чтобы лазерный луч был перпендикулярен передней плоскости 1-1 универсальной машины 1 радарного видеонаблюдения, и поворачивают универсальную машину 1 радарного видеонаблюдения влево и вправо, чтобы лазерный луч, излучаемый лазерным излучающим устройством 10, падал в точке D на осевой линии 17-3 дороги, затем регулируют угол рыскания и угол тангажа и затягивают винт 15 регулировки угла рыскания и винт 5 регулировки угла тангажа.
[0082] Этап SS4: извлекают вспомогательное монтажное устройство из охлаждающего отверстия универсальной машины 1 радарного видеонаблюдения, перемещают монтажную тележку к передней части конструкции, калибруют монтажный угол следующей универсальной машины 1 радарного видеонаблюдения и повторяют этапы SS1-SS3.
[0083] Вариант осуществления 3 по существу представляет собой способ позиционирования в одной точке, и целью регулировки угла рыскания и угла тангажа является окончательное нахождение точки D. После определения точки D угол рыскания и угол тангажа универсальной машины 1 радарного видеонаблюдения соответствуют установленным требованиям, как показано на фиг. 8 - фиг. 9. После определения точки D плоскость, в которой находится ABC, совпадает с вертикальной плоскостью 10-4, таким образом определяя позиционную зависимость между углом рыскания и углом тангажа.
[0084] Вариант осуществления 4
[0085] См. фиг. 8 - фиг. 10. В отличие от варианта осуществления 3, способ калибровки монтажного угла универсальной машины радарного видеонаблюдения также может быть определен тремя точками: точками разметки на осевой линии 17-3 дороги, точками разметки на точках B и E, C и D проекции непосредственно под универсальной машиной 1 радарного видеонаблюдения, регулировкой угла крена через датчик 8 уровня, поворотом универсальной машины 1 радарного видеонаблюдения в плоскости XZ. Когда датчик 8 уровня указывает уровень, это указывает на то, что угол крена был откалиброван, затягивают винт 16 регулировки угла крена. После завершения регулировки угла крена регулируют угол тангажа универсальной машины 1 радарного видеонаблюдения. Как показано на фиг. 10, соединительная линия фактической точки лазерной съемки - E'C', а включенный угол между E'C' и BC - α (фактический угол рыскания). Продолжают поворачивать универсальную машину 1 радарного видеонаблюдения в плоскости XY и в то же время приводят во вращение вспомогательное монтажное устройство в плоскости YZ, определяя, уменьшается ли включенный угол α между E'C' и BC. Когда α=0, это указывает на то, что угол рыскания был откалиброван, затягивают винт 15 регулировки угла рыскания; на основе завершения регулировки угла рыскания регулируют угол тангажа. После того, как угол крена и угол рыскания зафиксированы, универсальная машина 1 радарного видеонаблюдения может поворачиваться только в плоскости YZ, регулируют устройство регулировки монтажного угла и считывают значение шкалы, указанное указателем, так что, когда включенный угол между лазерным лучом и передней плоскостью 1-1 универсальной машины 1 радарного видеонаблюдения равен θ5, лазерное пятно падает на точку C (то есть C' совпадает с точкой C); снова регулируют устройство регулировки монтажного угла или делают так, чтобы лазерная точка падала в точке E (то есть точка E' совпадает с точкой E), когда включенный угол между лазерным лучом и передней плоскостью 1-1 универсальной машины 1 радарного видеонаблюдения равен θ4. На основе того, что точка C' совпадает с точкой C или точка E' совпадает с точкой E, поворачивают универсальную машину 1 радарного видеонаблюдения вверх и вниз под углом θ1+θ5, чтобы лазерный луч падал в точке D. В это время это означает, что угол тангажа был откалиброван. Затягивают винт 5 регулировки угла тангажа и на этой основе завершают калибровку монтажного угла для монтажного основания 4.
[0086] Способ калибровки монтажного угла универсальной машины лазерного видения содержит следующие конкретные этапы.
[0087] Этап SS1: на этапе предварительной калибровки механический рычаг монтажной тележки поднимает установщика в положение, предназначенное для установки, и установщик вставляет вспомогательное монтажное устройство в охлаждающее отверстие универсальной машины 1 радарного видеонаблюдения. В то же время командир на земле принимает точку B проекции непосредственно под универсальной машиной 1 радарного видеонаблюдения и высоту H установки в качестве опорной и использует геометрическую зависимость между характеристическим углом универсальной машины 1 радарного видеонаблюдения и высотой H установки. Отмечают точку B проекции непосредственно под универсальной машиной 1 радарного видеонаблюдения, самую дальнюю точку E волны излучения универсальной машины 1 радарного видеонаблюдения, ближайшую точку C волны излучения универсальной машины 1 радарного видеонаблюдения и точку D пересечения центральной линии главного лепестка волны излучения и прямой линии BC соответственно.
[0088] Этап SS2: регулируют угол крена и поворачивают универсальную машину 1 радарного видеонаблюдения. Когда датчик 8 уровня указывает на горизонтальное состояние, это означает, что монтажное основание 4 также находится в горизонтальном положении, и установщик затягивает винт 16 регулировки угла крена.
[0089] Этап SS3: регулируют угол рыскания, поворачивают универсальную машину 1 радарного видеонаблюдения влево и вправо и в то же время быстро поворачивают лазерное излучающее устройство 10 вверх и вниз, так чтобы лазерный луч, излучаемый лазерным излучающим устройством 10, падал на осевую линию 17-3 дороги. Когда проекция E'C лазерного луча на землю пересекается с прямой линией BC, регулируют ее на основе прямой линии BC, снова поворачивают универсальную машину 1 радарного видеонаблюдения влево и вправо и поворачивают регулировочный кронштейн 9 или поворотный механизм 11 вверх и вниз, пока лазерный луч не окажется на осевой линии дороги.
[0090] Этап SS4: регулируют угол тангажа универсальной машины 1 радарного видеонаблюдения, поворачивают регулировочный кронштейн 9 или поворотный механизм 11 до тех пор, пока лазерный пучок не будет перпендикулярен передней плоскости 1-1 универсальной машины 1 радарного видеонаблюдения, регулируют угол тангажа универсальной машины 1 радарного видеонаблюдения, регулируют устройство регулировки монтажного угла и считывают значение шкалы 9-6, указанное указателем, так что, когда включенный угол между лазерным пучком и передней плоскостью 1-1 универсальной машины 1 радарного видеонаблюдения будет равен θ5, лазерная точка C' совпадает с точкой C; снова регулируют устройство регулировки монтажного угла или делают лазерную точку E' совпадающей с точкой E, когда включенный угол между лазерным пучком и передней плоскостью 1-1 универсальной машины 1 радарного видеонаблюдения равен θ4. На основе совпадения точек C' и C или E' и E поворачивают универсальную машину 1 радарного видеонаблюдения вверх и вниз на угол θ1+θ5, чтобы лазерный луч падал на точку D, и затягивают винт 5 регулировки угла тангажа на монтажном основании 4.
[0091] Этап SS5: извлекают вспомогательное монтажное устройство из охлаждающего отверстия универсальной машины 1 радарного видеонаблюдения, перемещают монтажную тележку к передней части конструкции, калибруют монтажный угол следующей универсальной машины 1 радарного видеонаблюдения и повторяют этапы SS1-SS4.
[0092] Среди них вышеупомянутая точка C' представляет собой пересечение лазерного пучка и прямой линии BC при повороте в соответствии с первым углом θ4 тангажа перед калибровкой монтажного угла универсальной машины 1 радарного видеонаблюдения, точка D представляет собой пересечение центральной линии главного лепестка волны излучения и прямой линии BC, а точка E' представляет собой пересечение лазерного луча и прямой линии BC при повороте в соответствии со вторым углом θ5 тангажа перед калибровкой монтажного угла универсальной машины 1 радарного видеонаблюдения.
[0093] Вариант осуществления 5
[0094] См. фиг. 11 - фиг. 12. В способе калибровки монтажного угла универсальной машины радарного видеонаблюдения, если для управления используется поворотный механизм, способ управления отличается от способа ручного управления для регулировки кронштейна. Следовательно, перед завершением этапа SS2 и переходом к этапу SS3 способ калибровки дополнительно включает в себя следующие этапы.
[0095] Этап SS21: центральный контроллер инициализирует систему.
[0096] Этап SS22: монтажник вводит угол регулировки универсальной машины 1 радарного видеонаблюдения через блок ввода ключа и переходит к этапу SS23.
[0097] Этап SS23: дисплейный блок отображает введенный угол регулировки, и установщик оценивает, является ли введенный угол регулировки правильным, и переходит к этапу SS24, если он является правильным, в противном случае он возвращается к этапу SS22.
[0098] Дисплейный блок представляет собой дисплейный блок OLED, и углы регулировки включают в себя угол рыскания и угол тангажа, оба из которых могут быть измерены высокоскоростным вращающимся гироскопом в трехмерном пространстве, и угол рыскания также может быть измерен электронным компасом, то есть угол рыскания вертикальной плоскости 10-4, где текущий лазерный луч расположен относительно осевой линии 17-3 дороги, и северный полюс геомагнитного поля в качестве опорной ориентации; В соответствии с измеренным углом рыскания и углом тангажа, установщик вводит эти два угла в блок ввода ключа, что может быть использовано в качестве угла регулировки для регулировки монтажного угла универсальной машины 1 радарного видеонаблюдения.
[0099] Этап SS24: центральный контроллер использует широтно-импульсную модуляцию (ШИМ) для управления поворотным механизмом 11 для тангажирования и поворота в соответствии с углом регулировки. Когда установщик вводит монтажный угол, центральный контроллер управляет поворотным механизмом 11 для поворота вверх и вниз в соответствии с введенным углом рыскания, а затем приводит лазерное излучающее устройство 10 во вращение вверх и вниз в вертикальной плоскости 10-4. В то же время, в соответствии с введенным углом рыскания, поворачивают универсальную машину 1.
[0100] Посредством автоматического измерения угла угол регулировки вводится вручную, а затем поворотный механизм 11 используется для регулировки и калибровки монтажного угла универсальной машины 1 радарного видеонаблюдения, что относится к режиму электрической регулировки. По сравнению с режимом регулировки регулировочного кронштейна 9, электрическая регулировка происходит быстрее. В процессе регулировки регулировочного кронштейна 9 после перемещения лазера в отмеченную точку положение лазерного излучающего устройства 10 должно быть заблокировано с помощью стопорных винтов 9-5, что менее эффективно, чем эффективность регулировки поворотного механизма 11.
[0101] Подводя итог, на основе усовершенствования существующих способов установки, техническая схема изобретения может осуществлять быструю отладку и точную установку, а время отладки на ранней стадии сокращается до 2 минут, что экономит много времени, повышает точность и уменьшает негативное воздействие на движение транспорта, вызванное временным перекрытием дороги в процессе установки.
[0102] Вышеприведенное описание является только предпочтительным вариантом осуществления настоящего изобретения и объяснением применяемых технических принципов. Разработчики в этой области должны понимать, что технический объем, связанный с настоящим изобретением, не ограничивается технической схемой, образованной конкретной комбинацией вышеуказанных технических признаков, но также охватывает другие технические схемы, образованные любой комбинацией вышеуказанных технических признаков или их эквивалентных признаков, без отступления от концепции изобретения. Например, вышеуказанные признаки могут быть заменены (но не ограничиваются ими) техническими признаками с аналогичными функциями, раскрытыми в настоящем описании.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА НАВЕДЕНИЯ ГОРНОГО КОМБАЙНА | 2015 |
|
RU2716765C2 |
| УСТРОЙСТВО СОЕДИНЕНИЯ ЭЛЕМЕНТОВ НАВЕСНЫХ ФАСАДОВ СО СТАЛЬНОЙ КОНСТРУКЦИЕЙ ЗДАНИЯ | 2021 |
|
RU2838122C1 |
| Способ калибровки внешних параметров видеокамер | 2021 |
|
RU2780717C1 |
| СИСТЕМА И СПОСОБ ИСПОЛЬЗОВАНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА ДЛЯ МОНТИРОВАНИЯ И ДЕМОНТИРОВАНИЯ УСТРОЙСТВА НА ЭЛЕКТРИЧЕСКОМ КАБЕЛЕ | 2019 |
|
RU2775719C2 |
| СПОСОБ АВТОМАТИЧЕСКОЙ КАЛИБРОВКИ УГЛОВ КРЕПЛЕНИЯ ВИДЕОКАМЕР В СОСТАВЕ СИСТЕМ ТЕХНИЧЕСКОГО ЗРЕНИЯ | 2023 |
|
RU2804826C1 |
| Отображение пространственного положения летательного аппарата | 2014 |
|
RU2651621C2 |
| НЕИНВАЗИВНЫЙ СПОСОБ И УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ СКОРОСТИ ПОТОКА РЕКИ, ОТКРЫТОГО КАНАЛА ИЛИ ЖИДКОСТИ, ТЕКУЩЕЙ В ПОДЗЕМНОЙ ТРУБЕ ИЛИ КАНАЛЕ | 2020 |
|
RU2820987C1 |
| Способ калибровки камеры, установленной за лобовым стеклом на автомобиле | 2021 |
|
RU2762201C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ЛЕТАТЕЛЬНОГО АППАРАТА ОТНОСИТЕЛЬНО ВЗЛЕТНО-ПОСАДОЧНОЙ ПОЛОСЫ | 2018 |
|
RU2700908C1 |
| УСТРОЙСТВО КОНТРОЛЯ ОРИЕНТАЦИИ ПАССИВНЫХ КОСМИЧЕСКИХ АППАРАТОВ | 2011 |
|
RU2486112C1 |




Предлагается вспомогательное монтажное устройство для универсальной машины радарного видеонаблюдения для дороги, содержащее соединительный элемент, устройство регулировки монтажного угла и лазерное излучающее устройство. Нижняя часть соединительного элемента соединена с универсальной машиной радарного видеонаблюдения, верхняя часть соединительного элемента соединена с устройством регулировки монтажного угла. Соединительный элемент выполнен с вставкой, причем нижняя часть вставки вставлена в монтажное отверстие универсальной машины радарного видеонаблюдения, верхняя часть вставки соединена с устройством регулировки монтажного угла, а верхняя часть устройства регулировки монтажного угла соединена с лазерным излучающим устройством. Универсальная машина радарного видеонаблюдения установлена на монтажном основании. Вспомогательное монтажное устройство предназначено для регулировки монтажного угла калибровочного монтажного основания. Монтажный угол включает угол крена, угол рыскания и угол тангажа. Соединительный элемент снабжен датчиком уровня для регулировки угла крена калибровочного монтажного основания. Технический результат - снижение трудоемкости и повышение точности установки монтажного устройства для универсальной машины радарного видеонаблюдения для дороги. 4 н. и 18 з.п. ф-лы, 12 ил.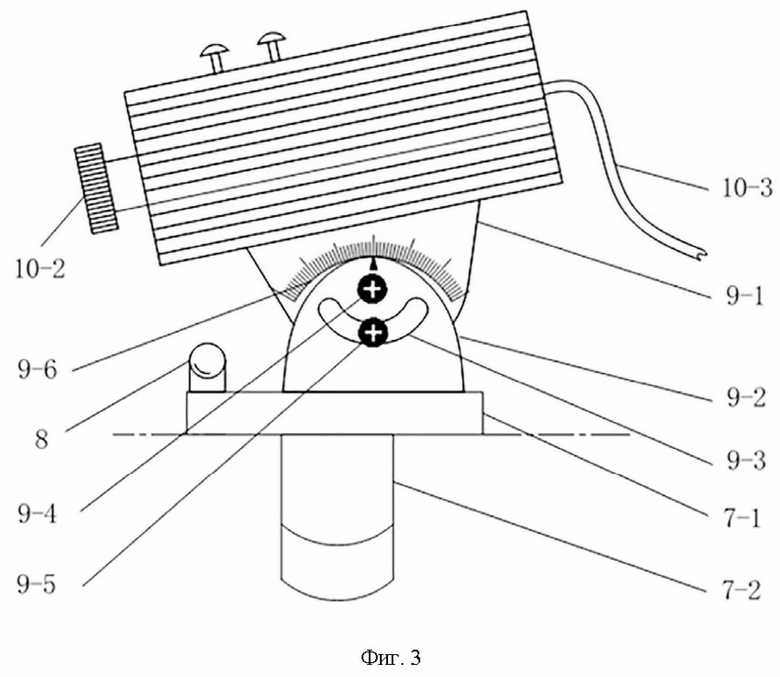
1. Вспомогательное монтажное устройство для универсальной машины радарного видеонаблюдения для дороги, отличающееся тем, что содержит соединительный элемент, устройство регулировки монтажного угла и лазерное излучающее устройство (10), при этом нижняя часть соединительного элемента разъемно соединена с универсальной машиной радарного видеонаблюдения, верхняя часть соединительного элемента соединена с устройством (1) регулировки монтажного угла, а верхняя часть устройства регулировки монтажного угла соединена с лазерным излучающим устройством (10) и устройство регулировки монтажного угла предназначено для регулировки угла лазерного излучающего устройства (10) в вертикальной плоскости (10-4);
вертикальная плоскость (10-4), где расположен лазерный луч, излучаемый лазерным излучающим устройством (10), перпендикулярна передней плоскости (1-1) универсальной машины (1) радарного видеонаблюдения;
универсальная машина радарного видеонаблюдения установлена на монтажном основании (4), а вспомогательное монтажное устройство предназначено для регулировки монтажного угла калибровочного монтажного основания (4), при этом монтажный угол включает в себя угол крена, угол рыскания и угол тангажа;
соединительный элемент снабжен датчиком (8) уровня, причем датчик (8) уровня предназначен для регулировки угла крена калибровочного монтажного основания (4);
устройство регулировки монтажного угла представляет собой регулировочный кронштейн (9) или поворотный механизм (11), и регулировочный кронштейн (9) или поворотный механизм (11) приводит во вращение лазерное излучающее устройство (10) так, чтобы регулировать угол рыскания и угол тангажа калибруемого монтажного основания (4).
2. Вспомогательное монтажное устройство для универсальной машины радарного видеонаблюдения для дороги по п.1, отличающееся тем, что универсальная машина (1) радарного видеонаблюдения снабжена монтажным отверстием, соединительный элемент представляет собой вставной элемент (7), вставной элемент (7) вставлен в монтажное отверстие, а нижняя поверхность устройства регулировки монтажного угла перпендикулярна передней плоскости (1-1) универсальной машины (1) радарного видеонаблюдения и вертикальной плоскости, где расположен лазерный луч.
3. Вспомогательное монтажное устройство для универсальной машины радарного видеонаблюдения для дороги по п.2, отличающееся тем, что монтажное отверстие представляет собой отверстие для охлаждения, расположенное на универсальной машине (1) радарного видеонаблюдения.
4. Вспомогательное монтажное устройство для универсальной машины радарного видеонаблюдения для дороги по п.2, отличающееся тем, что вставной элемент (7) выполнен из светочувствительной смолы.
5. Вспомогательное монтажное устройство для универсальной машины радарного видеонаблюдения для дороги по любому из пп.2-4, отличающееся тем, что вставной элемент (7) содержит плоскую пластину (7-1) и штифты (7-2), которые соединены друг с другом, причем штифты (7-2) приспособлены к монтажным отверстиям.
6. Вспомогательное монтажное устройство для универсальной машины радарного видеонаблюдения для дороги по п.5, отличающееся тем, что плоская пластина (7-1) и штифты (7-2) выполнены за одно целое или соединены разъемно.
7. Вспомогательное монтажное устройство для универсальной машины радарного видеонаблюдения для дороги по п.5, отличающееся тем, что кронштейн (9) регулировки тангажа содержит верхний регулировочный кронштейн (9-1) и нижний регулировочный кронштейн (9-2), нижняя часть которого соединена с плоской пластиной (7-1), а обе стороны нижнего регулировочного кронштейна (9-2) шарнирно соединены с верхним регулировочным кронштейном (9-1) через первый крепежный винт (9-4), на одной стороне нижнего регулировочного кронштейна (9-2) расположена дугообразная канавка (9-3) и через дугообразную канавку (9-3) проходит стопорный винт (9-5) для фиксации верхнего регулировочного кронштейна (9-1).
8. Вспомогательное монтажное устройство для универсальной машины радарного видеонаблюдения для дороги по п.7, отличающееся тем, что одна или обе стороны верхнего регулировочного кронштейна (9-1) снабжены шкалами (9-6), а нижний регулировочный кронштейн (9-2) снабжен указателем, соответствующим шкале (9-6).
9. Вспомогательное монтажное устройство для универсальной машины радарного видеонаблюдения для дороги по любому из пп.1-4, отличающееся тем, что монтажное основание (4) содержит верхний U-образный элемент (12), седловидный соединительный элемент (13) и нижний U-образный элемент (14), причем верхний U-образный элемент (12) и седловидный соединительный элемент (13) соединены друг с другом через винт (5) регулировки угла тангажа и второй крепежный винт (6); причем нижний U-образный элемент (14) соединен с седловидным соединительным элементом (13) через винт (16) регулировки угла крена и второй крепёжный винт (6), левая и правая стороны седловидного соединительного элемента (13) снабжены первыми дугообразными канавками для установки винта (16) регулировки угла крена, а передняя и задняя стороны седловидного соединительного элемента (13) снабжены вторыми дугообразными канавками, и вторая дугообразная канавка предназначена для установки винта (5) регулировки угла тангажа, верхняя часть верхней U-образной части (12) снабжена множеством третьих дугообразных канавок, третьи дугообразные канавки предназначены для установки винта (15) регулировки угла рыскания.
10. Вспомогательное монтажное устройство для универсальной машины радарного видеонаблюдения для дороги по любому из пп.2-4, отличающееся тем, что верхняя часть поворотного механизма (11) соединена с лазерным излучающим устройством (10) и поворотный механизм (11) соединен со вставкой (7), которая включает в себя плоскую пластину (7-1) и штифты (7-1), которые соединены друг с другом.
11. Вспомогательное монтажное устройство для универсальной машины радарного видеонаблюдения для дороги по п.10, отличающееся тем, что поворотный механизм (11) содержит корпус (11-1) поворотного механизма, верхний дверной элемент (11-2) и нижний дверной элемент (11-3), причем верхний дверной элемент (11-2) шарнирно прикреплен к корпусу (11-1) поворотного механизма.
12. Вспомогательное монтажное устройство для универсальной машины радарного видеонаблюдения для дороги по п.11, отличающееся тем, что поворотный механизм (11) электрически соединен с центральным контроллером, а центральный контроллер электрически соединен с блоком ввода ключа и дисплейным блоком соответственно, причем блок ввода ключа предназначен для ввода угла регулировки для управления вращением поворотного механизма (11), а дисплейный блок предназначен для отображения угла регулировки.
13. Способ калибровки монтажного угла универсальной машины радарного видеонаблюдения, который используется для вспомогательного монтажного устройства универсальной машины радарного видеонаблюдения для дороги по любому из пп.1-11, отличающийся тем, что
монтажное основание (4) содержит верхний U-образный элемент (12), седловидный соединительный элемент (13) и нижний U-образный элемент (14), причем верхний U-образный элемент (12) соединен с седловидным соединительным элементом (13) через винт (5) регулировки угла тангажа и второй крепежный винт (6), а нижний U-образный элемент (14) соединен с седловидным соединительным элементом; левая и правая стороны седловидного соединительного элемента (13) снабжены первыми дугообразными канавками, которые используются для установки винтов (16) регулировки угла крена; передняя и задняя стороны седловидного соединительного элемента (13) снабжены вторыми дугообразными канавками, которые используются для установки винтов (5) регулировки угла тангажа; и верхняя часть верхнего U-образного элемента (12) снабжена множеством третьих дугообразных канавок, и первыми дугообразными канавками;
причем способ содержит следующие этапы:
этап SS1: на этапе предварительной установки на основе точки B проекции и высоты H установки непосредственно под универсальной машиной (1) радарного видеонаблюдения и с использованием геометрической зависимости между характеристическим углом облучения универсальной машины (1) радарного видеонаблюдения и высотой H установки отмечают наземную точку осевой линии (17-3) дороги перед универсальной машиной (1) радарного видеонаблюдения, причем точка включает в себя точку D центральной точки волны излучения универсальной машины радарного видеонаблюдения, и точка D является осевой линией главного лепестка пучка излучения и осевой линией (17-3) дороги;
этап SS2: устанавливают вспомогательное монтажное устройство на универсальную машину (1) радарного видеонаблюдения с помощью монтажной тележки, регулируют угол крена универсальной машины (1) радарного видеонаблюдения, вращают универсальную машину (1) радарного видеонаблюдения и затягивают винт (16) регулировки угла крена, когда датчик (8) уровня указывает на горизонтальное состояние;
этап SS3: регулируют угол рыскания и угол тангажа универсальной машины (1) радарного видеонаблюдения, вращают регулировочный кронштейн (9) или поворотный механизм (11) вверх и вниз, чтобы лазерный луч был перпендикулярен поверхности универсальной машины радарного видеонаблюдения, и вращают универсальную машину (1) радарного видеонаблюдения влево и вправо, чтобы лазерный луч, излучаемый лазерным излучающим устройством (10), падал в точке D на осевой линии дороги, затем регулируют угол рыскания и угол тангажа и затягивают винт (15) регулировки угла рыскания и винт (5) регулировки угла тангажа.
14. Способ калибровки монтажного угла универсальной машины радарного видеонаблюдения по п.13, отличающийся тем, что на этапе SS1 характеристический угол облучения включает в себя угол θ2 облучения и угол θ3 максимального тангажа, а положение точки D определяют по следующей формуле:
определение положения точки D: BD = H⋅tan(θ3-θ2/2).
15. Способ калибровки монтажного угла универсальной машины радарного видеонаблюдения по п.13, отличающийся тем, что дополнительно содержит этап SS4 на основе завершения этапа SS3:
этап SS4: извлекают вспомогательное монтажное устройство из монтажного отверстия универсальной машины радарного видеонаблюдения и перемещают монтажную тележку к передней части конструкции; калибруют монтажный угол следующей универсальной машины (1) радарного видеонаблюдения и повторяют этапы SS1-SS3.
16. Способ калибровки монтажного угла универсальной машины радарного видеонаблюдения, который используется для вспомогательного монтажного устройства универсальной машины радарного видеонаблюдения для дороги по п.12, отличающийся тем, что
монтажное основание (4) содержит верхний U-образный элемент (12), седловидный соединительный элемент (13) и нижний U-образный элемент (14), причем верхний U-образный элемент (12) соединен с седловидным соединительным элементом (13) через винт (5) регулировки угла тангажа и второй крепежный винт (6), а нижний U-образный элемент (14) соединен с седловидным соединительным элементом; левая и правая стороны седловидного соединительного элемента (13) снабжены первыми дугообразными канавками, которые используются для установки винтов (16) регулировки угла крена; передняя и задняя стороны седловидного соединительного элемента (13) снабжены вторыми дугообразными канавками, которые используются для установки винтов (5) регулировки угла тангажа; и верхняя часть верхнего U-образного элемента (12) снабжена множеством третьих дугообразных канавок и первыми дугообразными канавками;
причем способ содержит следующие этапы:
этап SS1: на этапе предварительной установки на основе точки B проекции и высоты H установки непосредственно под универсальной машиной (1) радарного видеонаблюдения и с использованием геометрической зависимости между характеристическим углом облучения универсальной машины (1) радарного видеонаблюдения и высотой H установки отмечают наземную точку осевой линии (17-3) дороги перед универсальной машиной (1) радарного видеонаблюдения, причем точка включает в себя точку D центральной точки волны излучения универсальной машины радарного видеонаблюдения и точка D является осевой линией главного лепестка пучка излучения и осевой линией (17-3) дороги;
этап SS2: устанавливают вспомогательное монтажное устройство на универсальную машину (1) радарного видеонаблюдения с помощью монтажной тележки, регулируют угол крена универсальной машины (1) радарного видеонаблюдения, вращают универсальную машину (1) радарного видеонаблюдения и затягивают винт (16) регулировки угла крена, когда датчик (8) уровня указывает на горизонтальное состояние;
этап SS3: регулируют угол рыскания и угол тангажа универсальной машины (1) радарного видеонаблюдения, вращают регулировочный кронштейн (9) или поворотный механизм (11) вверх и вниз, чтобы лазерный луч был перпендикулярен поверхности универсальной машины радарного видеонаблюдения, и вращают универсальную машину (1) радарного видеонаблюдения влево и вправо, чтобы лазерный луч, излучаемый лазерным излучающим устройством (10), падал в точке D на осевой линии дороги, затем регулируют угол рыскания и угол тангажа и затягивают винт (15) регулировки угла рыскания и винт (5) регулировки угла тангажа.
17. Способ калибровки монтажного угла универсальной машины радарного видеонаблюдения по п.16, отличающийся тем, что на этапе SS1 характеристический угол облучения включает в себя угол θ2 облучения и угол θ3 максимального тангажа, а положение точки D определяют по следующей формуле:
определение положения точки D: BD = H⋅tan(θ3-θ2/2).
18. Способ калибровки монтажного угла универсальной машины радарного видеонаблюдения по п.16, отличающийся тем, что дополнительно содержит этап SS4 на основе завершения этапа SS3:
этап SS4: извлекают вспомогательное монтажное устройство из монтажного отверстия универсальной машины радарного видеонаблюдения и перемещают монтажную тележку к передней части конструкции; калибруют монтажный угол следующей универсальной машины (1) радарного видеонаблюдения и повторяют этапы SS1-SS3.
19. Способ калибровки монтажного угла универсальной машины радарного видеонаблюдения по п.16, отличающийся тем, что если поворотный механизм (11) используется для регулировки монтажного угла, перед завершением этапа SS2 и переходом на этап SS3, способ калибровки содержит:
этап SS21: центральный контроллер инициализирует систему;
этап SS22: устанавливают вспомогательное монтажное устройство на универсальную машину (1) радарного видеонаблюдения на монтажной тележке, вводят угол регулировки универсальной машины (1) радарного видеонаблюдения через блок ввода ключа, причем угол регулировки включает в себя угол рыскания и угол тангажа, и переходят к этапу SS23;
этап SS23: дисплейный блок отображает введенный угол регулировки и определяют, правильно ли введен угол регулировки; если ввод правильный, переходят к этапу SS24; если нет, возвращаются к этапу SS22;
этап SS24: центральный контроллер управляет поворотным механизмом (11), чтобы обеспечить тангаж и вращение в соответствии с углом регулировки, и после ввода угла рыскания центральный контроллер управляет поворотным механизмом (11), чтобы обеспечить вращение вверх и вниз на основе введенного угла рыскания, тем самым приводя во вращение лазерное излучающее устройство (10) вверх и вниз в вертикальной плоскости (10-4); в то же время вращают универсальную машину (1) радарного видеонаблюдения влево и вправо на основе введенного угла рыскания.
20. Способ калибровки монтажного угла универсальной машины радарного видеонаблюдения, который используется для вспомогательного монтажного устройства универсальной машины радарного видеонаблюдения для дороги по любому из пп.1-11, отличающийся тем, что
монтажное основание (4) содержит верхний U-образный элемент (12), седловидный соединительный элемент (13) и нижний U-образный элемент (14), причем верхний U-образный элемент (12) соединен с седловидным соединительным элементом (13) через винт (5) регулировки угла тангажа и второй крепежный винт (6), а нижний U-образный элемент (14) соединен с седловидным соединительным элементом; левая и правая стороны седловидного соединительного элемента (13) снабжены первыми дугообразными канавками, которые используются для установки винтов (16) регулировки угла крена; передняя и задняя стороны седловидного соединительного элемента (13) снабжены вторыми дугообразными канавками, которые используются для установки винтов (5) регулировки угла тангажа; и верхняя часть верхнего U-образного элемента (12) снабжена множеством третьих дугообразных канавок и первыми дугообразными канавками;
причем способ содержит следующие этапы:
этап SS1: на этапе предварительной установки на основе точки B проекции и высоты H установки непосредственно под универсальной машиной (1) радарного видеонаблюдения и с использованием геометрической зависимости между характеристическим углом облучения универсальной машины (1) радарного видеонаблюдения и высотой H установки отмечают наземные точки осевой линии (17-3) дороги перед универсальной машиной (1) радарного видеонаблюдения, включая точку B проекции непосредственно ниже, ближайшую точку E волны излучения универсальной машины радарного видеонаблюдения и волны излучения универсальной машины радарного видеонаблюдения;
этап SS2: устанавливают вспомогательное монтажное устройство на универсальную машину (1) радарного видеонаблюдения с помощью монтажной тележки, регулируют угол крена универсальной машины (1) радарного видеонаблюдения, вращают универсальную машину (1) радарного видеонаблюдения и затягивают винт (16) регулировки угла крена, когда датчик (8) уровня указывает на горизонтальное состояние;
этап SS3: регулируют угол рыскания универсальной машины (1) радарного видеонаблюдения, вращают универсальную машину (1) радарного видеонаблюдения влево и вправо и в то же время быстро вращают лазерное излучающее устройство (10) вверх и вниз, так чтобы лазерный луч, излучаемый лазерным излучающим устройством (10), падал на осевую линию (17-3) дороги, когда проекция E'C' лазерного луча на земле пересекается с прямой линией BC, причем регулировку выполняют на основе прямой линии BC, и вращают регулировочный кронштейн (9) или поворотный механизм (11) вверх и вниз до тех пор, пока проекция E'C' лазерного луча на земле не совпадет с прямой линией BC, и затягивают винт (15) регулировки угла рыскания;
этап SS4: регулируют угол тангажа универсальной машины (1) радарного видеонаблюдения, вращают регулировочный кронштейн (9) или поворотный механизм (11) до тех пор, пока лазерный луч не будет перпендикулярен передней плоскости (1-1) универсальной машины (1) радарного видеонаблюдения, регулируют угол тангажа универсальной машины (1) радарного видеонаблюдения, регулируют устройство регулировки монтажного угла и считывают значение шкалы, указываемое указателем, когда угол между лазерным лучом и передней плоскостью (1-1) универсальной машины (1) радарного видеонаблюдения является вторым углом θ5 тангажа, лазерная точка C' совпадает с точкой C; или делают угол между лазерным лучом и передней плоскостью (1-1) универсальной машины (1) радарного видеонаблюдения первым углом θ4 тангажа, лазерная точка E' совпадает с точкой E, и на основе совпадения точки C' и точки C или точка E' совпадает с точкой E, универсальную машину (1) радарного видеонаблюдения вращают вверх и вниз в соответствии с углом θ1+θ5, так что лазерный луч падает на точку D, завершают регулировку угла тангажа и затягивают винт (5) регулировки угла тангажа на монтажном основании 4;
при этом θ=π/2+θ1, θ5=π/2-θ1, θ1=θ2/2, вышеупомянутая точка C' является пересечением лазерного луча и прямой линии BC при вращении в соответствии с первым углом θ4 тангажа перед калибровкой монтажного угла универсальной машины 1 радарного видеонаблюдения, точка D является пересечением центральной линии главного лепестка волны излучения и прямой BC, а точка E' является точкой пересечения лазерного луча и прямой линии BC при вращении в соответствии с вторым углом θ5 тангажа перед калибровкой монтажного угла универсальной машины 1 радарного видеонаблюдения, причем θ1 является половинным углом облучения.
21. Способ калибровки монтажного угла универсальной машины радарного видеонаблюдения по п.20, отличающийся тем, что на этапе SS1 характеристический угол облучения включает в себя угол θ2 облучения и угол θ3 максимального тангажа, а положения трех точек E, C и D соответственно определяются по следующим формулам:
определение положения E: BE =H⋅tan(θ3-θ2);
расположение точки C: BC = H⋅tan(θ3);
расположение точки D: BD = H⋅tan(θ3-θ2/2).
22. Способ калибровки монтажного угла универсальной машины радарного видеонаблюдения по п.20, отличающийся тем, что на основании выполнения этапа SS4 он дополнительно содержит этап SS5:
этап SS5: извлекают вспомогательное монтажное устройство из монтажного отверстия универсальной машины (1) радарного видеонаблюдения, перемещают монтажную тележку к передней части конструкции, калибруют монтажный угол следующей универсальной машины (1) радарного видеонаблюдения и повторяют этапы SS1-SS4.
| CN 113203066 A, 03.08.2021 | |||
| CN 112357110 A, 12.02.2021 | |||
| CN 104917947 A, 16.09.2015 | |||
| CN109102703 A, 28.12.2018 | |||
| 0 |
|
SU155530A1 | |
| Устройство для оценки состояния дорожного покрытия | 2020 |
|
RU2732728C1 |

