Заявленное изобретение относится к области медицинской рентгеновской техники, в частности, обработке рентгеновских изображений (РИ) с помощью искусственной нейронной сети (ИНС).
Из уровня техники известен способ обработки РИ с помощью ИНС, описанный в статье Toepfer K. et. al., Denoising in digital radiographic images using a deep convolutional neural network / Carestream Health 2020, https://www.carestream.com/en/us/medical/software/~/media//publicSite/
Resources/Smart%20Noise%20Cancellation%20%20Technical%20Paper%20%20Dec%202020.pdf
Известный способ обработки РИ содержит:
подготовку данных для обучения ИНС, включающую получение набора исходных РИ и генерацию шумовых карт, имитирующих реальный шум на РИ, аналогичных исходным, но полученных при более низких значениях облученности;
обучение ИНС, включающее итерационную корректировку коэффициентов ИНС до выполнения условия сходимости по значению функции ошибки, зависящей от выхода ИНС и сгенерированных шумовых карт;
вычисление очищенного от шума РИ, включающее подачу исходного РИ на вход обученной ИНС и вычитание полученной на выходе шумовой карты из исходного РИ.
Недостатком известного способа обработки является принципиальная ограниченность дозы в плоскости детектора принципом ALARA (as low as reasonable achievable). Ограничение дозы в плоскости детектора, в свою очередь, ограничивает максимальное достижимое отношение сигнал-шум на исходных РИ. Из-за этого ограничения ИНС обучается удалять не весь шум, а только некоторую искусственно добавленную его часть.
Наиболее близким аналогом заявленного изобретения является способ подавления шума на РИ, описанный в US 2020311878 A1 (кл. G06K9/62, 01.10.2020). Известный способ включает получение с помощью приемника рентгеновского излучения серии исходных РИ и калибровку генератора шума (ГШ), обучение ИНС с использованием обучающего набора данных, состоящего из множества пар РИ, каждая из которых включает зашумленное РИ и эталонное РИ, получение РИ с помощью приемника рентгеновского излучения, получение очищенного от шума РИ с помощью предварительно обученной ИНС, вывод РИ пользователю или на дальнейшую обработку.
Недостатком известного способа является необходимость обрабатывать значительного размера наборы исходных проекционных РИ, полученных в процессе сканирования объекта исследования в некотором диапазоне углов проекций, при этом для построения РИ с высоким отношением сигнал-шум используют все собранные проекционные РИ, а для построения РИ с более низким отношением сигнал-шум используют только их некоторым образом выбранную часть, что ввиду свойств алгоритмов реконструкции приводит к тому, что результирующие РИ, полученные из частичного набора проекционных РИ, отличаются не только более низким отношением сигнал-шум, но и наличием различных артефактов, конкретный вид которых зависит от свойств аппарата и способа построения частичного набора.
Техническая проблема, решаемая настоящим изобретением, состоит в повышении качества РИ, облегчении чтения РИ и возможности дополнительного снижения лучевой нагрузки на пациента.
Техническим результатом является увеличение отношения сигнал-шум, что повышает информативность получаемых РИ и в целом приводит к повышению диагностической ценности исследований.
Технический результат достигается тем, что заявленный способ подавления шума на РИ с помощью искусственной нейронной сети включает:
получение с помощью приемника рентгеновского излучения серии исходных РИ и калибровку ГШ,
обучение ИНС с использованием обучающего набора данных, состоящего из множества пар РИ, каждая из которых включает зашумленное РИ и эталонное РИ,
получение РИ с помощью приемника рентгеновского излучения,
получение очищенного от шума РИ с помощью предварительно обученной ИНС,
вывод РИ пользователю или на дальнейшую обработку,
по предложению
обучение ИНС проводят путем чередования этапа обучения с использованием искусственного шума и этапа обучения с использованием реального шума, каждый из которых проводят итерационно до выполнения условия сходимости,
при этом на этапе обучения с использованием искусственного шума на каждой итерации на вход ИНС подают РИ с добавленным на них искусственным шумом, производят вычисления внутри структуры ИНС, рассчитывают ошибку между выходом ИНС и соответствующим эталонным РИ и с помощью метода обратного распространения ошибки обновляют веса ИНС,
на этапе обучения с использованием реального шума на каждой итерации на вход ИНС подают исходные РИ, каждое из которых берут из одной из серий РИ, каждую из которых получают путем съемки статичного объекта в неизменных условиях экспозиции, повторенной N раз, где N ≥ 2, производят вычисления внутри структуры ИНС, рассчитывают ошибку между выходом ИНС и соответствующим эталонным РИ и с помощью метода обратного распространения ошибки обновляют веса ИНС.
Обучение ИНС проводят путем чередования этапов обучения с использованием искусственного и реального шума с общим числом этапов K ≥ 2,
где K - общее количество чередующихся этапов обучения,
при этом в начале первого этапа ИНС инициализируют стартовым набором коэффициентов, представляющими из себя матрицу случайных чисел или квазислучайную ортогональную матрицу, а в начале каждого последующего этапа k, где k>1, ИНС инициализируют набором коэффициентов, полученным в конце этапа k - 1.
В качестве эталонного РИ на этапе обучения с использованием искусственного шума используют карту добавленного искусственного шума, а в качестве эталонного РИ на этапе обучения с использованием реального шума используют карту шума, полученную путем вычитания линейной комбинации всех исходных РИ статичного объекта в соответствующей серии из исходного РИ.
В качестве эталонного РИ на этапе обучения с использованием искусственного шума используют соответствующее исходное РИ до добавления на него искусственного шума, а в качестве эталонного РИ на этапе обучения с использованием реального шума используют линейную комбинацию всех исходных РИ статичного объекта в соответствующей серии.
На этапе калибровки ГШ шум моделируют суммой двух компонент, где первая компонента характеризует сумму квантового шума с попиксельным собственным шумом электроники детектора и описывается спектром пространственных частот и дисперсией, которая растет со значением накопленного сигнала, а вторая компонента характеризует строчно-полосовой шум, пространственное распределение которого описывается полиномиальной функцией или тригонометрическим рядом.
На этапе получения очищенного от шума РИ исходный снимок преобразовывают посредством линейной нормализации и сохраняют в память, а его копию подают на вход предварительно обученной ИНС, получают на выходе из нее шумовую карту, вычитают шумовую карту из сохраненного ранее линейно нормализованного РИ и получают РИ с подавленным шумом.
На этапе получения очищенного от шума РИ исходный снимок обрабатывают посредством линейной нормализации, подают нормализованный снимок на вход предварительно обученной ИНС и на выходе из нее получают РИ с подавленным шумом.
РИ с подавленным шумом преобразовывают посредством кусочно-линейной нормализации к диапазону значений сигналов пикселей исходного РИ.
Заявленный способ обработки РИ иллюстрируется следующими графическими материалами:
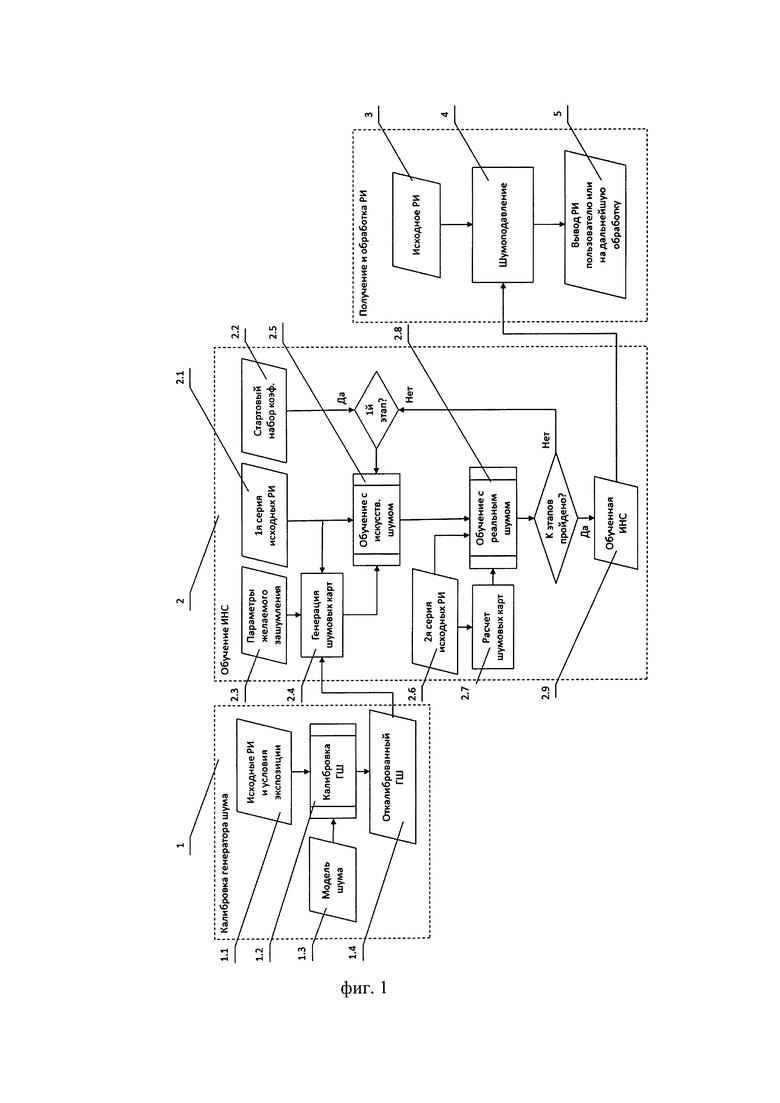
Фиг. 1 - блок-схема обработки РИ и вывода результата обработки пользователю;
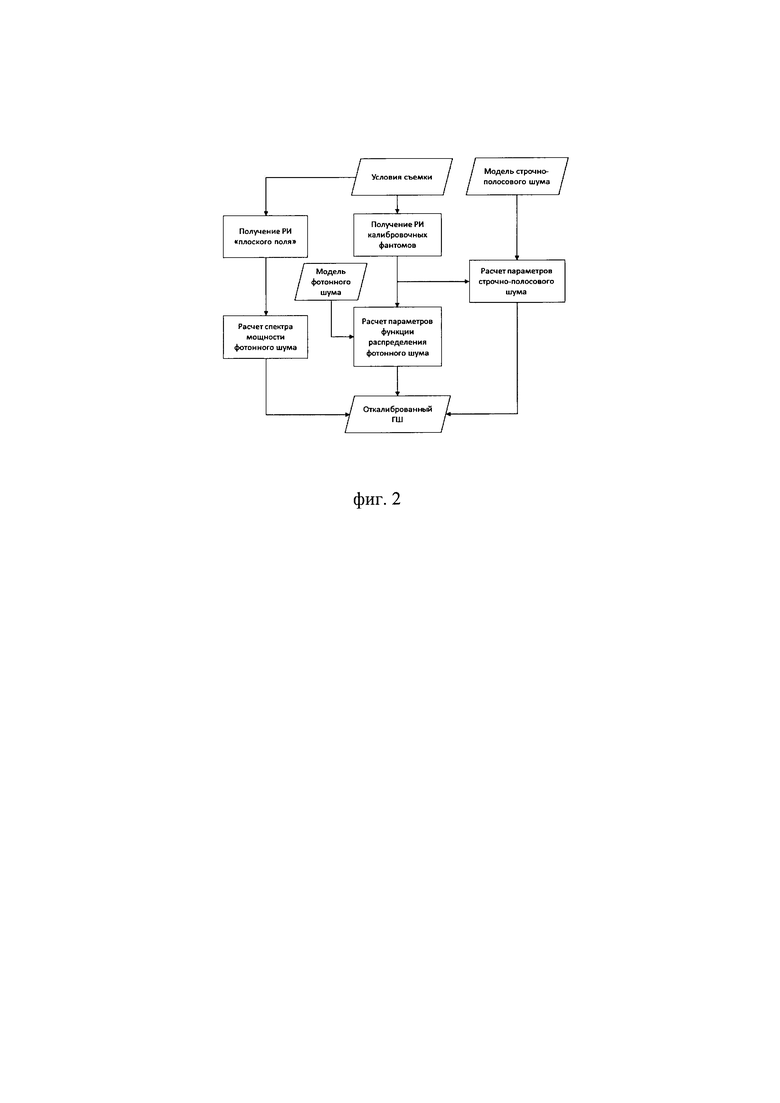
Фиг. 2 - блок-схема калибровки ГШ;
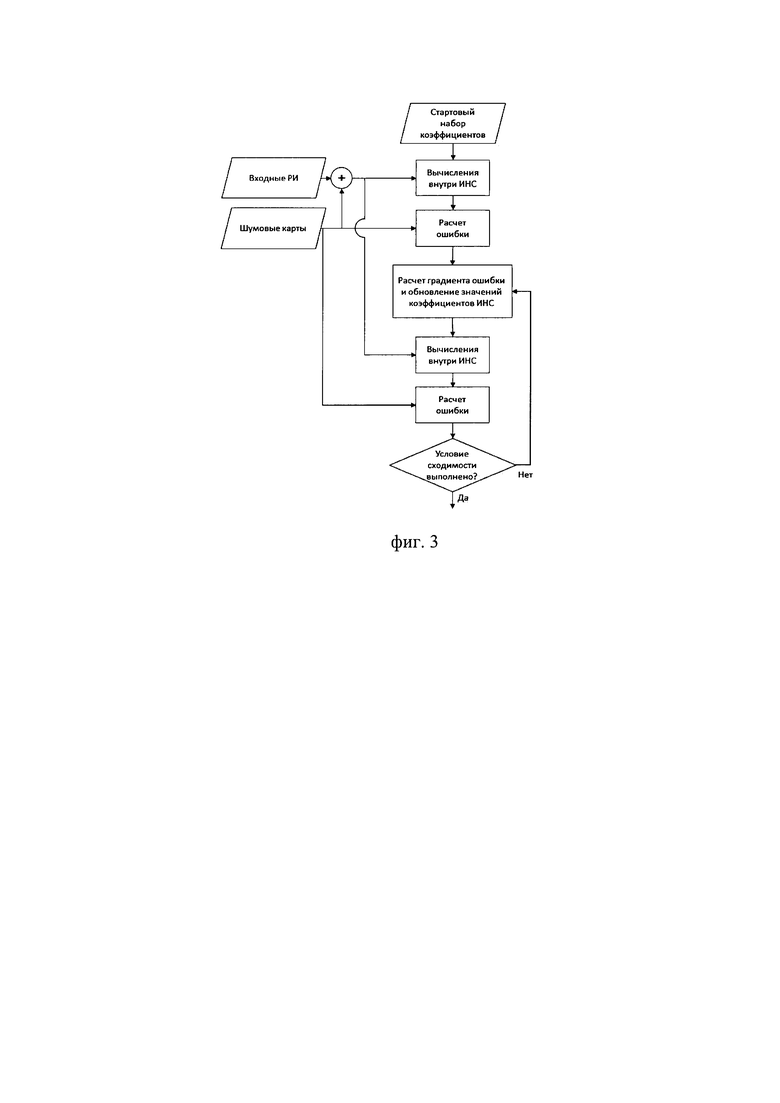
Фиг. 3 - блок-схема обучения ИНС с использованием искусственного шума;
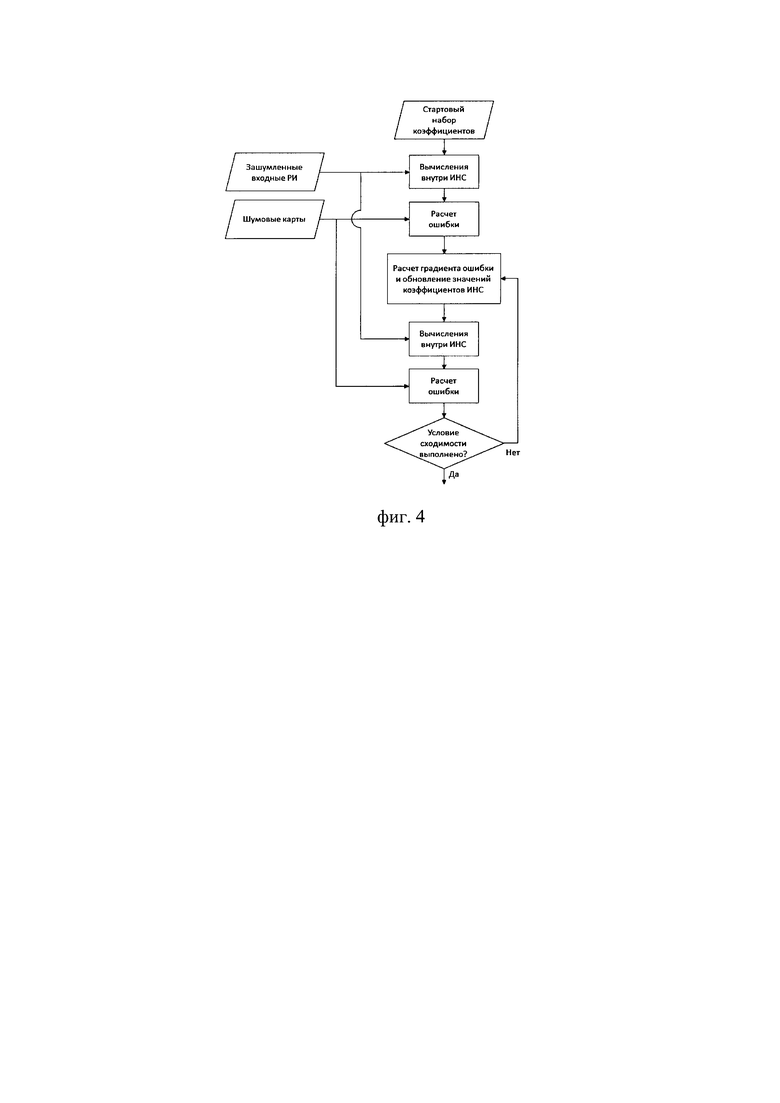
Фиг. 4 - блок-схема обучения ИНС с использованием реального шума;
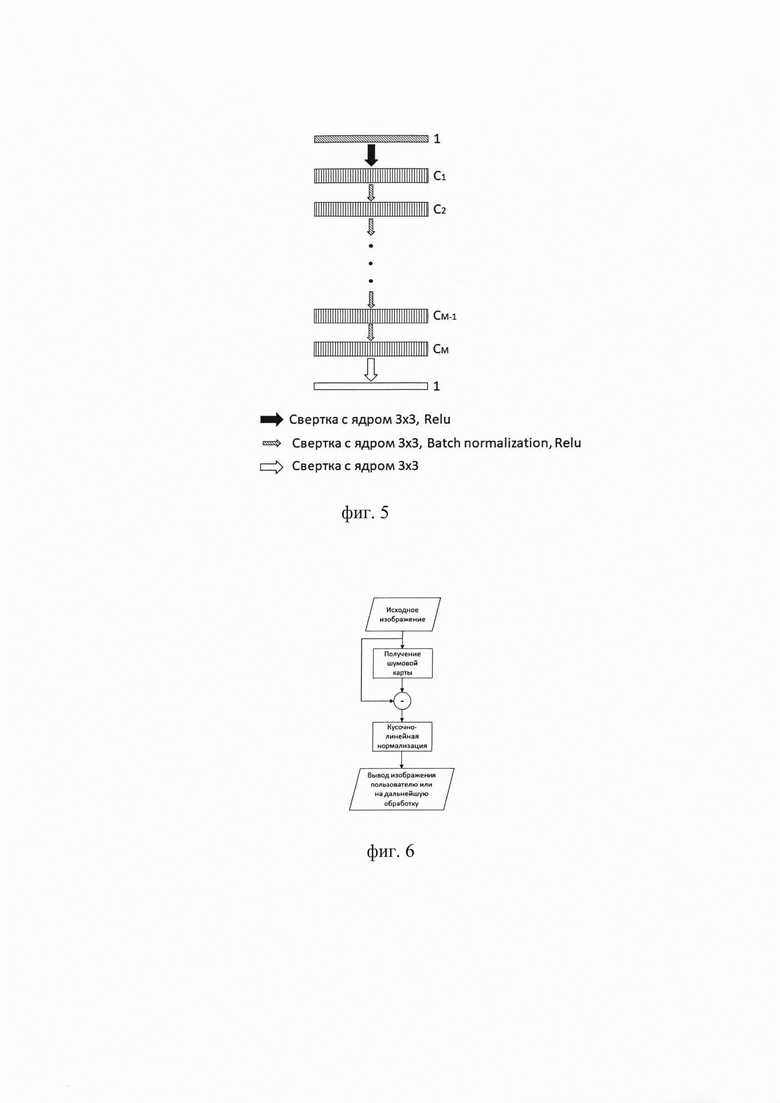
Фиг. 5 - архитектура ИНС;
Фиг. 6 - блок-схема подавления шума;
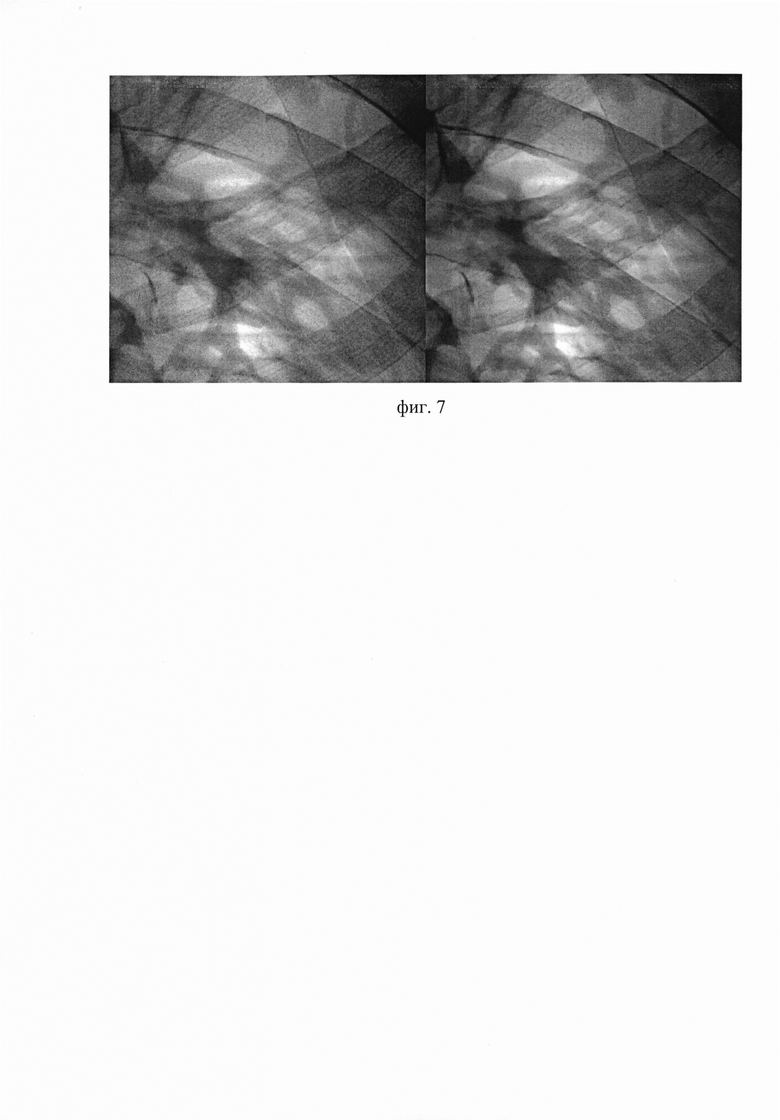
Фиг. 7 - РИ грудной клетки до (слева) и после (справа) шумоподавления.
Осуществление изобретения.
Блок-схема обработки РИ и вывода результата обработки пользователю (фиг. 1) содержит блок калибровки ГШ (1), блок обучения ИНС (2), блок получения и обработки РИ, включающий получение исходного РИ (3), блок подавления шума (4) и блок вывода РИ пользователю или на дальнейшую обработку (5).
Стандартный рентгеновский аппарат, для которого может быть использовано настоящее изобретение, содержит источник и детектор рентгеновского излучения, генератор (рентгеновское питающее устройство), компьютер и программное обеспечение.
РИ могут подаваться, в частности, в формате TIFF.
Блок калибровки ГШ (1) выполнен с возможностью получения на аппарате серии исходных РИ (1.1) с помощью приемника рентгеновского излучения при заданных условиях получения РИ (условиях экспозиции), задания модели шума (1.3), калибровки ГШ (1.2) в соответствии с заданной моделью шума (1.3) и получения откалиброванного ГШ (1.4).
Условия экспозиции могут задавать значениями слоя половинного ослабления (СПО) и количества электричества. Вместо СПО может использоваться другая метрика или набор метрик, характеризующих спектральный состав излучения. Вместо количества электричества может использоваться другая метрика, характеризующая суммарный поток излучения. К условиям получения РИ помимо условий экспозиции относятся температуры элементов детектора и параметры считывания сигнала, такие как длительность окна накопления сигнала, частота считывания, коэффициент усиления и пр.
Под шумом понимают случайное отклонение измеренного значения некоторой физической величины от его точного значения.
При калибровке ГШ 1.2 (фиг. 2) предварительно задают следующие условия съемки: расстояние источник-приемник, размер поля коллимации, анодное напряжение, состав и толщину дополнительного фильтрующего материала, количество электричества или желаемый уровень отсечки сигнала в плоскости детектора, распределение состава и толщин материалов в калибровочном объекте, рабочие температуры или допустимый диапазон температур, параметры считывания, необходимое количество исходных РИ при каждом наборе прочих условий.
Далее осуществляют съемку при заданных условиях. В качестве калибровочного объекта, в частности, может выступать фантом из акрила или алюминия с дискретно изменяющимся по поверхности коэффициентом пропускания рентгеновского излучения или т.н. «плоское поле», когда из пучка удаляют все посторонние предметы за исключением конструктивных элементов рентгеновского аппарата или «рамка» из рентген-непрозрачного материала, закрывающая от излучения области некоторой ширины вдоль каждой из сторон детектора. После этого на основе полученных РИ производят расчет зависимости реакции приемника от характеристик падающего на него излучения.
Затем происходит калибровка ГШ, которая включает подбор такой функции генерации шумовых карт шума 1 и 2, чтобы получаемый шум имел такое же распределение, как у реальных детекторов, и подбор такого ядра свертки для шумовой карты шума 1, чтобы спектр пространственных частот свертки сгенерированной шумовой карты с этим ядром совпадал со спектром пространственных частот шума реальных детекторов.
Блок обучения (2) ИНС (фиг. 1) выполнен с возможностью получения первой серии исходных РИ (2.1), генерации стартового набора коэффициентов ИНС (2.2), получения параметров желаемого зашумления (2.3), генерации шумовых карт (2.4), обучения ИНС с использованием искусственного шума (2.5), получения второй серии исходных РИ (2.6), расчета шумовых карт (2.7), обучения ИНС с использованием реального шума (2.8), получения обученной ИНС (2.9).
Обучение ИНС с использованием искусственного шума (2.5) включает в себя следующие стадии (фиг. 3):
- инициализацию ИНС стартовым набором коэффициентов (2.2), если это первый этап обучения (в частности, возможна инициализация матрицы коэффициентов случайными значениями или квазислучайной ортогональной матрицей), или инициализацию ИНС набором коэффициентов, полученным на предыдущем этапе обучения;
- подачу на вход ИНС зашумленных РИ и соответствующих им «эталонных» шумовых карт и получение зашумленных РИ путем сложения исходных РИ с соответствующими «эталонными» шумовыми картами (полученными путем генерации (2.4) индивидуально для каждого РИ из серии);
- вычисления внутри структуры ИНС;
- расчет ошибки между шумовыми картами, полученными на выходе ИНС, и соответствующими «эталонными» шумовыми картами;
- расчет градиента ошибки, как функции от частных производных ошибки по значениям коэффициентов ИНС, и последующее обновление коэффициентов ИНС путем изменения их значений на величины, соответствующие частным производным, взятым с весами, характеризующими требуемую скорость обучения;
- итерационное повторение подачи на вход ИНС зашумленных РИ, вычислений внутри структуры ИНС, расчета ошибки и обновления коэффициентов до тех пор, пока рассчитанная ошибка не начнет удовлетворять условию окончания обучения (сходимости).
После достижения условий сходимости начинается обучение ИНС с использованием реального шума.
Обучение ИНС с использованием реального шума (2.8) включает в себя следующие стадии (фиг. 4):
- инициализацию ИНС стартовым набором коэффициентов (2.2), если это первый этап обучения (в частности, возможна инициализация матрицы коэффициентов случайными значениями или квазислучайной ортогональной матрицей), или инициализацию ИНС набором коэффициентов, полученным на предыдущем этапе обучения;
- подачу на вход ИНС зашумленных РИ, непосредственно полученных в приемнике излучения, и соответствующих им «эталонных» шумовых карт (полученных путем расчета (2.7) индивидуально для каждого РИ из серии);
- вычисления внутри структуры ИНС;
- расчет ошибки между шумовыми картами, полученными на выходе ИНС, и соответствующими «эталонными» шумовыми картами;
- расчет градиента ошибки, как функции от частных производных ошибки по значениям коэффициентов ИНС, и последующее обновление коэффициентов ИНС путем изменения их значений на величины, соответствующие частным производным, взятым с весами, характеризующими требуемую скорость обучения;
- итерационное повторение подачи на вход ИНС зашумленных РИ, вычислений внутри структуры ИНС, расчета ошибки и обновления коэффициентов до тех пор, пока рассчитанная ошибка не начнет удовлетворять условию окончания обучения (сходимости).
Обученная ИНС (2.9), в частном варианте реализации, содержит входной, выходной и М скрытых слоев, и включает в себя (фиг. 5):
- компонент свертки, выполненный с возможностью преобразования входного РИ в карту переменных (количество карт переменных в слое i обозначено на схеме Ci);
- компонент активации (Relu), выполненный с возможностью нелинейного преобразования входной карты переменных;
- компонент пакетной нормализации (Batch normalization), выполненный с возможностью такой нормализации набора входных переменных, что среднее значение выходного набора переменных становится равным нулю, а дисперсия - единице.
Наконец, непосредственно в режиме реального времени при выполнении исследования пациента, производятся получение и обработка РИ. Блок получения и обработки РИ выполнен с возможностью ввода РИ (3), подавления шума (4) и вывода РИ пользователю на дельнейшую обработку (5).
Блок подавления шума 4 (фиг. 6) включает:
- подачу исходного РИ на вход предварительно обученной ИНС и получение шумовой карты на выходе из ИНС;
- получение очищенного от шума РИ путем вычитания полученной шумовой карты из исходного РИ;
- кусочно-линейную нормализацию очищенного от шума РИ.
Далее, с помощью блока вывода РИ (5) рентгеновские изображения выводятся пользователю или на дальнейшую обработку. В качестве блока вывода РИ (5) может использоваться, в частности, один или несколько дисплеев типа ЭЛТ, ЖК, плазменный, сенсорный, проектор, LED, OLED и т.д. Устройство обработки РИ работает следующим образом.
На рентгеновском аппарате, содержащем источник рентгеновского излучения, детектор, монитор для отображения РИ и запоминающее устройство, производят облучение пациента рентгеновским излучением, опционально отфильтрованным с помощью селективно поглощающего материала (например, алюминия или меди). Регистрируют прошедшее сквозь пациента рентгеновское излучение в детекторе и получают исходные РИ.
На этапе калибровки ГШ (1.2) в отсутствии объекта исследования получают на аппарате серии исходных РИ (1.1) «плоского поля». Плоское поле - РИ, полученный в условиях, когда из пучка рентгеновского излучения удалены все посторонние предметы за исключением конструктивных элементов рентгеновского аппарата.
Затем вычисляют на основе РИ плоского поля (фиг. 2) спектр мощности шума согласно ГОСТ Р МЭК 62220-1-3-2013. Спектр мощности шума - модуль преобразования Фурье автоковариационной функции шума. Мощность шума, заключенная в двухмерном частотном интервале, как функция двух пространственных частот.Автоковариация определяется изменением высоты в зависимости от смещения в плоскости, параллельной поверхности.
Получают серии исходных РИ тест-объекта с переменным коэффициентом пропускания, в частности, в качестве такого объекта может быть использован фантом «Fluorad A+D». Рассчитывают на основе РИ тест-объекта зависимости параметров функции распределения сигнала от условий экспозиции. В частности, может использоваться модель, согласно которой суммарный эффект источников шума пикселя РИ моделируется распределенной по закону Гаусса случайной величиной, а дисперсия шума пикселя линейно растет со значением накопленного в пикселе сигнала: σ2I(p)=a*I(p)+b, где I(p) - уровень сигнала в пикселе p, а b и a - параметры, которые требуется подобрать.
Получают серии исходных РИ фантома «рамки», изготовленного из рентген-непрозрачного материала и закрывающего области шириной до нескольких десятков пикселей с каждой стороны детектора. Рассчитывают на основе полученных РИ параметры строчно-полосового шума, который полагают независящим от условий экспозиции и описывают, в частности, средним значением шума в строке и изменением шумового сигнала вдоль строки или вдоль и поперек полосы, которое могут задавать, в частности, полиномом порядка N или тригонометрическим рядом.
Условия экспозиции могут задавать непосредственно контролируемыми оператором аппарата значениями: расстояние источник-приемник, размер поля коллимации, анодное напряжение, состав и толщина дополнительного фильтрующего материала, количество электричества или желаемый уровень отсечки сигнала в плоскости детектора, распределение состава и толщин материалов в калибровочном объекте, необходимое количество исходных РИ при каждом наборе прочих условий или же, как альтернатива, могут задаваться желаемые спектр и энергия излучения, например, в виде значения толщины слоя половинного ослабления (СПО) и кермы в плоскости детектора, в таком случае под них должны быть подобраны соответствующие значения параметров, контролируемых оператором. К условиям получения РИ помимо условий экспозиции относятся температуры элементов детектора и параметры считывания сигнала, такие как длительность окна накопления сигнала, частота считывания, коэффициент усиления и пр.
Обучение ИНС проводят путем чередования этапов обучения с использованием искусственного и реального шума с общим числом этапов
K ≥ 2, где K - общее количество чередующихся этапов обучения.
В начале первого этапа ИНС инициализируют стартовым набором коэффициентов, представляющими из себя матрицу случайных чисел или квазислучайную ортогональную матрицу, а в начале каждого последующего этапа k, где k>1, ИНС инициализируют набором коэффициентов, полученным в конце этапа k - 1.
Возможен выбор из двух альтернативных вариантов обучения:
либо в качестве эталонного РИ на этапе обучения с использованием искусственного шума используют карту добавленного искусственного шума, а в качестве эталонного РИ на этапе обучения с использованием реального шума используют карту шума, полученную путем вычитания линейной комбинации всех исходных РИ статичного объекта в соответствующей серии из исходного РИ,
либо в качестве эталонного РИ на этапе обучения с использованием искусственного шума используют соответствующее исходное РИ до добавления на него искусственного шума, а в качестве эталонного РИ на этапе обучения с использованием реального шума используют линейную комбинацию всех исходных РИ статичного объекта в соответствующей серии.
На этапе калибровки ГШ шум моделируется суммой двух компонент, где первая компонента характеризует сумму квантового шума с попиксельным собственным шумом электроники детектора (шум 1) и описывается спектром пространственных частот и дисперсией, которая растет со значением накопленного сигнала, а вторая компонента характеризует строчно-полосовой шум (шум 2), пространственное распределение которого описывается полиномиальной функцией или тригонометрическим рядом.
Далее, в зависимости от выбранного ранее варианта обучения, выбирают соответствующий вариант получения очищенного от шума РИ:
либо исходное РИ преобразовывают посредством линейной нормализации и сохраняют в память, а его копию подают на вход предварительно обученной ИНС, получают на выходе из нее шумовую карту, вычитают шумовую карту из сохраненного ранее линейно нормализованного РИ и получают РИ с подавленным шумом,
либо исходное РИ обрабатывают посредством линейной нормализации, подают нормализованное РИ на вход предварительно обученной ИНС и на выходе из нее получают РИ с подавленным шумом.
На первом этапе обучения ИНС с искусственным шумом (2.5) производят инициализацию ИНС стартовым набором коэффициентов, в частности, возможна инициализация матрицы коэффициентов случайными значениями или квазислучайной ортогональной матрицей. На каждом последующем этапе k, где k>1, производят инициализацию ИНС набором коэффициентов, полученных в конце этапа k - 1.
В блоке обучения с использованием искусственного шума (фиг. 1, фиг. 3) производят инициализацию ИНС, затем подают на вход ИНС первую серию исходных РИ (2.1) и соответствующие им искусственно сгенерированные в соответствии с заданными параметрами (2.3) «эталонные» шумовые карты (2.4), рассчитывают ошибки между шумовыми картами, полученными на выходе ИНС и соответствующими «эталонными» шумовыми картами; рассчитывают градиент ошибки, как функцию от частных производных ошибки по значениям коэффициентов ИНС. После этого обновляют коэффициенты ИНС путем изменения их значений на величины соответствующих частных производных, взятых с весами (вес - коэффициент или число, сопоставляемое отдельным слагаемым), характеризующими требуемую скорость обучения. Затем осуществляют итерационное повторение подачи на вход ИНС зашумленных РИ, расчет ошибки и обновление коэффициентов до тех пор, пока рассчитанная ошибка не начнет удовлетворять условию окончания обучения (сходимости).
В блоке обучения ИНС с использованием реального шума (2.8) (фиг. 1, фиг. 4) производят инициализацию ИНС, затем подают на вход ИНС вторую серию исходных РИ (2.6) и соответствующие им рассчитанные «эталонные» шумовые карты (2.7), рассчитывают ошибки между шумовыми картами, полученными на выходе ИНС и соответствующими «эталонными» шумовыми картами; рассчитывают градиент ошибки, как функцию от частных производных ошибки по значениям коэффициентов ИНС. После этого обновляют коэффициенты ИНС путем изменения их значений на величины, соответствующие частным производным, взятым с весовыми коэффициентами, характеризующими требуемую скорость обучения. Затем осуществляют итерационное повторение подачи на вход ИНС зашумленных РИ, расчет ошибки и обновление коэффициентов до тех пор, пока рассчитанная ошибка не начнет удовлетворять условию окончания обучения (сходимости).
На этапе получения и обработки РИ облучают пациента с помощью рентгеновского аппарата. Рентгеновские лучи, проникая сквозь ткани, поступают на детектор, воспринимающий поэлементно полный кадр изображения внутренней структуры объекта. Полученное РИ (3) подают на вход предварительно обученной ИНС (2.9). Блок ввода РИ выполнен с возможностью загрузки файлов РИ, включающих информацию об объекте съемки, информацию о самом РИ и условиях его получения и передаче загруженных файлов или получения РИ в приемнике рентгеновского излучения, предобработки полученного РИ и передаче файла РИ и метаданных, включающих информацию об объекте съемки, информацию о самом РИ и условиях его получения. РИ обрабатывают с помощью блока шумоподавления (4), в котором подают исходные РИ на вход предварительно обученной ИНС и обрабатывают их посредством линейной нормализации. Получают шумовую карту с помощью ИНС, в которой линейно нормализованное РИ сохраняется в память, а его копия подается на вход ИНС для шумоподавления, на выходе из которой получают шумовую карту. Получают очищенное от шума РИ путем вычитания полученной шумовой карты из исходного РИ.
После шумоподавления РИ выводится пользователю или на дальнейшую обработку (5).
Пример. РИ грудной клетки (фиг. 7).
РИ грудной клетки получают с помощью рентгеновского аппарата, содержащего источник рентгеновского излучения, детектор, монитор для отображения РИ и запоминающее устройство.
На фиг. 7 представлены два РИ грудной клетки. Слева - РИ грудной клетки до обработки, а справа - после шумоподавления. На исходном РИ грудной клетки (слева) уровень шума выше, чем на РИ после шумоподавления (справа). Благодаря шумоподавлению РИ легче читается и повышается вероятность обнаружения и корректной интерпретации малоконтрастных объектов, что позволяет повысить информативность получаемых РИ и, в целом, приводит к повышению диагностической ценности исследований.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ формирования порога решающего устройства на основе нейрорегулятора | 2020 |
|
RU2731332C1 |
| Способ распознавания космических аппаратов по редуцированным радиолокационным изображениям | 2015 |
|
RU2620727C2 |
| Система для разработки интеллектуального датчика | 2019 |
|
RU2714039C1 |
| Способ калибровки интеллектуальных датчиков | 2019 |
|
RU2730367C1 |
| СПОСОБ РЕНТГЕНОВСКОЙ ТОМОГРАФИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2505800C2 |
| СПОСОБ И УСТРОЙСТВО ОБРАБОТКИ ВИДЕОИЗОБРАЖЕНИЙ ДЛЯ УМЕНЬШЕНИЯ ШУМА | 2024 |
|
RU2832540C1 |
| СПОСОБ И СИСТЕМА ДЛЯ СТАБИЛИЗАЦИИ КОЭФФИЦИЕНТА УСИЛЕНИЯ ФОТОУМНОЖИТЕЛЯ, ИСПОЛЬЗУЕМОГО В ДЕТЕКТОРЕ ИЗЛУЧЕНИЯ | 2007 |
|
RU2425397C2 |
| СПОСОБ И УСТРОЙСТВО УЛУЧШЕНИЯ РЕЧЕВОГО СИГНАЛА С ИСПОЛЬЗОВАНИЕМ БЫСТРОЙ СВЕРТКИ ФУРЬЕ | 2022 |
|
RU2795573C1 |
| СПОСОБ И СИСТЕМА ИДЕНТИФИКАЦИИ НОВООБРАЗОВАНИЙ НА РЕНТГЕНОВСКИХ ИЗОБРАЖЕНИЯХ | 2020 |
|
RU2734575C1 |
| СПОСОБ ДИАГНОСТИРОВАНИЯ КОМПЛЕКСА БОРТОВОГО ОБОРУДОВАНИЯ ВОЗДУШНЫХ СУДОВ НА ОСНОВЕ МАШИННОГО ОБУЧЕНИЯ БЕЗ УЧИТЕЛЯ С АВТОМАТИЧЕСКИМ ОПРЕДЕЛЕНИЕМ ПАРАМЕТРОВ ОБУЧЕНИЯ МОДЕЛЕЙ | 2023 |
|
RU2818858C1 |
Использование: для подавления шума на рентгеновском изображении. Сущность изобретения заключается в том, что получают с помощью приемника рентгеновского излучения серию исходных рентгеновских изображений и выполняют калибровку генератора шума (ГШ), обучают искусственную нейронную сеть (ИНС) с использованием обучающего набора данных, состоящего из множества пар рентгеновского изображения (РИ), каждая из которых включает зашумленное РИ и эталонное РИ, получают очищенное от шума РИ с помощью предварительно обученной ИНС и выводят РИ пользователю или на дальнейшую обработку, при этом обучение ИНС проводят путем чередования этапа обучения с использованием искусственного шума и этапа обучения с использованием реального шума, каждый из которых проводят итерационно до выполнения условия сходимости, причем на этапе обучения с использованием искусственного шума на каждой итерации на вход ИНС подают РИ с добавленным на них искусственным шумом, производят вычисления внутри структуры ИНС, рассчитывают ошибку между выходом ИНС и соответствующим эталонным РИ и с помощью метода обратного распространения ошибки обновляют веса ИНС, на этапе обучения с использованием реального шума на каждой итерации на вход ИНС подают исходные РИ, каждое из которых берут из одной из серий РИ, каждую из которых получают путем съемки статичного объекта в неизменных условиях экспозиции, повторенной N раз, где N ≥ 2, производят вычисления внутри структуры ИНС, рассчитывают ошибку между выходом ИНС и соответствующим эталонным РИ и с помощью метода обратного распространения ошибки обновляют веса ИНС. Технический результат: обеспечение возможности повышения качества получаемых рентгеновских изображений. 7 з.п. ф-лы, 7 ил.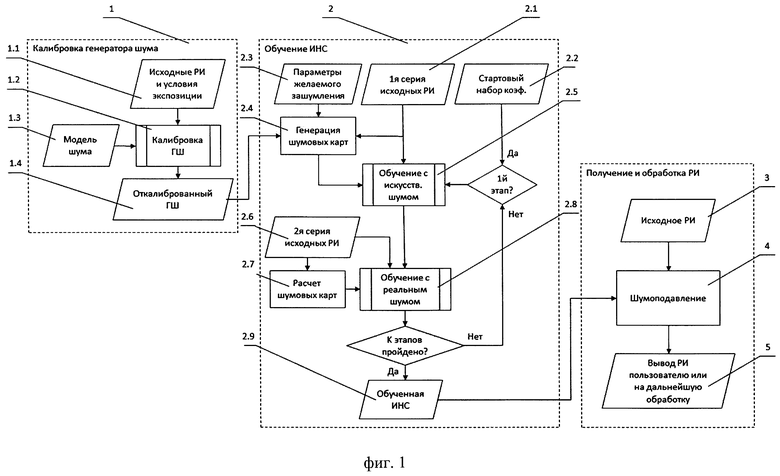
1. Способ подавления шума на рентгеновском изображении (РИ) с помощью искусственной нейронной сети, включающий получение с помощью приемника рентгеновского излучения серии исходных рентгеновских изображений и калибровку генератора шума (ГШ),
обучение искусственной нейронной сети (ИНС) с использованием обучающего набора данных, состоящего из множества пар РИ, каждая из которых включает зашумленное РИ и эталонное РИ,
получение РИ с помощью приемника рентгеновского излучения, получение очищенного от шума РИ с помощью предварительно обученной ИНС,
вывод РИ пользователю или на дальнейшую обработку,
отличающийся тем, что
обучение ИНС проводят путем чередования этапа обучения с использованием искусственного шума и этапа обучения с использованием реального шума, каждый из которых проводят итерационно до выполнения условия сходимости,
при этом на этапе обучения с использованием искусственного шума на каждой итерации на вход ИНС подают РИ с добавленным на них искусственным шумом, производят вычисления внутри структуры ИНС, рассчитывают ошибку между выходом ИНС и соответствующим эталонным РИ и с помощью метода обратного распространения ошибки обновляют веса ИНС,
на этапе обучения с использованием реального шума на каждой итерации на вход ИНС подают исходные РИ, каждое из которых берут из одной из серий РИ, каждую из которых получают путем съемки статичного объекта в неизменных условиях экспозиции, повторенной N раз, где N ≥ 2, производят вычисления внутри структуры ИНС, рассчитывают ошибку между выходом ИНС и соответствующим эталонным РИ и с помощью метода обратного распространения ошибки обновляют веса ИНС.
2. Способ подавления шума на рентгеновском изображении с помощью искусственной нейронной сети по п.1, отличающийся тем, что обучение ИНС проводят путем чередования этапов обучения с использованием искусственного и с использованием реального шума с общим числом этапов K, где K ≥ 2, при этом в начале первого этапа ИНС инициализируют стартовым набором коэффициентов, представляющими из себя матрицу случайных чисел или квазислучайную ортогональную матрицу, а в начале каждого последующего этапа k, где k > 1, ИНС инициализируют набором коэффициентов, полученным в конце этапа k - 1.
3. Способ подавления шума на рентгеновском изображении с помощью искусственной нейронной сети по п.1, отличающийся тем, что в качестве эталонного РИ на этапе обучения с использованием искусственного шума используют карту добавленного искусственного шума, а в качестве эталонного РИ на этапе обучения с использованием реального шума используют карту шума, полученную путём вычитания линейной комбинации всех исходных РИ статичного объекта в соответствующей серии из исходного РИ.
4. Способ подавления шума на рентгеновском изображении с помощью искусственной нейронной сети по п.1, отличающийся тем, что в качестве эталонного РИ на этапе обучения с использованием искусственного шума используют соответствующее исходное РИ до добавления на него искусственного шума, а в качестве эталонного РИ на этапе обучения с использованием реального шума используют линейную комбинацию всех исходных РИ статичного объекта в соответствующей серии.
5. Способ подавления шума на рентгеновском изображении с помощью искусственной нейронной сети по п.1, отличающийся тем, что на этапе калибровки ГШ шум моделируют суммой двух компонент, где первая компонента характеризует сумму квантового шума с попиксельным собственным шумом электроники детектора и описывается спектром пространственных частот и дисперсией, которая растет со значением накопленного сигнала, а вторая компонента характеризует строчно-полосовой шум, пространственное распределение которого описывается полиномиальной функцией или тригонометрическим рядом.
6. Способ подавления шума на рентгеновском изображении с помощью искусственной нейронной сети по п. 3, отличающийся тем, что на этапе получения очищенного от шума РИ исходный снимок преобразовывают посредством линейной нормализации и сохраняют в память, а его копию подают на вход предварительно обученной ИНС, получают на выходе из неё шумовую карту, вычитают шумовую карту из сохраненного ранее линейно нормализованного РИ и получают РИ с подавленным шумом.
7. Способ подавления шума на рентгеновском изображении с помощью искусственной нейронной сети по п. 4, отличающийся тем, что на этапе получения очищенного от шума РИ исходное РИ обрабатывают посредством линейной нормализации, подают нормализованное РИ на вход предварительно обученной ИНС и на выходе из неё получают РИ с подавленным шумом.
8. Способ подавления шума на рентгеновском изображении с помощью искусственной нейронной сети по пп. 6, 7, отличающийся тем, что РИ с подавленным шумом преобразовывают посредством кусочно-линейной нормализации к диапазону значений сигналов пикселей исходного РИ.
| US 2020311878 A1, 01.10.2020 | |||
| CN 109949235 A, 28.06.2019 | |||
| CN 114494057 A, 13.05.2022 | |||
| CN 107871316 A, 03.04.2018 | |||
| Способ автоматической классификации рентгеновских изображений с использованием масок прозрачности | 2019 |
|
RU2716914C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УРОВНЯ ЯРКОСТИ В ЗОНЕ ИНТЕРЕСА ЦИФРОВОГО МЕДИЦИНСКОГО РЕНТГЕНОВСКОГО ИЗОБРАЖЕНИЯ | 2010 |
|
RU2431196C1 |

