Изобретение относится к области машиностроения и может быть использовано для управления следящей системой положением различных инерционных объектов, например, для управления положением камер сгорания жидкостных ракетных двигателей (ЖРД). При этом следящая система - это система, обеспечивающая изменение положения исполнительного органа (нагрузки) в соответствии с входным сигналом, произвольно меняющимся во времени. Т.е. следящая система отслеживает изменение маломощного входного сигнала и воспроизводит с определенной точностью это изменение на значительно более мощной нагрузке.
Известен способ управления цифровой электромеханической следящей системой - аналог (Батоврин А.А., Дашевский П.Г., Лебедев В.Д. и др. Цифровые системы управления электроприводами. Л., «Энергия», 1977. 256 с.) [1], заключающийся в том, что сравнивают сигнал напряжения в виде командного двоичного код от формирователя командного кода с сигналом напряжения виде двоичного кода от преобразователя угла поворота, формируют сигнал напряжения в виде двоичного кода ошибки, преобразуют напряжение двоичного кода ошибки в напряжение определенной полярности, усиливают его и подают на исполнительный двигатель, которым вращают исполнительный механизм и преобразователь угла поворота, а при совпадении сигнала напряжения в виде командного двоичного кода от формирователя командного кода и сигнала напряжения в виде двоичного кода преобразователя угла поворота прекращают подачу напряжения на исполнительный двигатель.
Недостатком такого способа управления цифровой электромеханической следящей системой является невозможность обеспечения требования по точности слежения при значительной нагрузке типа сухого трения.
Известен способ управления цифровой электромеханической следящей системой - прототип (см. Белицкий Д.С., Жарков М.Н., Стоялов В.В., Шутенко В.И. Электромеханический привод в системе управления режимами жидкостных ракетных двигателей. Известия академии наук. Теория и системы управления. 1996, №1, С 118-124) [2], заключающийся в том, что преобразуют сигналы напряжений в виде двоичных кодов Грея δг1, δг2, δг3 трех дискретных датчиков угла в сигнал напряжения в виде единого кода Грея обратной связи δуе, преобразуют его в сигнал напряжения в виде двоичного кода обратной связи δУ, сравнивают сигнал напряжения в виде командного двоичного кода δх с сигналом напряжения в виде двоичного кода обратной связи δy, формируют сигнал напряжения в виде двоичного кода рассогласования δp, сравнивают сигнал напряжения в виде двоичного кода рассогласования δp с заданной величиной сигнал напряжения в виде кода точности поддержания требуемого положения δт, при |δp|>δт преобразуют сигнал напряжение двоичного кода рассогласования δp в напряжение соответствующей коду рассогласования δp полярности, усиливают его и подают на два электродвигателя электромеханического привода приводя, во вращение вал редуктора, валы тормозной и предохранительной муфт, и валы дискретных датчиков угла электромеханического привода системы в требуемом направлении, а при |δp|<δт прекращают подачу напряжений на электро-двигатели электромеханического привода, останавливая вращение валов электродвигателей, вращение выходного вала редуктора, валов тормозной и предохранительной муфт и валов дискретных датчиков угла электромеханического привода системы.
При таком способе управления дублирование электродвигателей электромеханического привода (горячий резерв) обеспечивается работоспособность цифровой электромеханической системы при отказе одного из электродвигателей.
Недостатком такого способа управления цифровой электромеханической следящей системой является то, что данному способу, как и аналогу, присущи значительные ошибки слежения при наличии на выходном вале электромеханического привода системы значительной нагрузки в виде сухого трения.
Техническим результатом настоящего изобретения является повышение точности процесса слежения цифровой электромеханической следящей системой.
Технический результат достигается тем, что в способе управления цифровой электромеханической следящей системой, заключающемся в преобразовании сигналов напряжений в виде двоичных кодов Грея δг1, δг2, δг3 трех дискретных датчиков угла в сигнал напряжения в виде единого кода Грея обратной связи δге, преобразовании его в сигнал напряжения в виде двоичного кода обратной связи δy, сравнении сигнала напряжения в виде командного двоичного кода δx с сигналом напряжения в виде двоичного кода обратной связи δy, формировании сигнала напряжения в виде двоичного кода рассогласования δp, сравнении сигнала напряжения в виде двоичного кода рассогласования δр с заданной величиной сигнала напряжения кода точности поддержания требуемого положения δт и подаче на первый и второй электродвигатели электромеханического привода системы напряжения, в отличие от известного способа, при |δ|>δт преобразуют сигнал напряжения двоичного кода рассогласования δР в напряжение соответствующей сигналу напряжения в виде кода рассогласования δp полярности, усиливают его и подают на первый электродвигатель электромеханического привода системы, приводя во вращение вал второго электродвигателя, вал редуктора, валы тормозной и предохранительной муфт, и валы дискретных датчиков угла электромеханического привода системы в требуемом направлении, а при |δ|<δт прекращают подачу напряжения на первый электродвигатель электромеханического привода и формируют в нем ток торможения, останавливая вращение валов электродвигателей, вращение выходного вала редуктора, валов тормозной и предохранительной муфт и валов дискретных датчиков угла электромеханического привода системы, при чем ток торможения определяется дифференциальным уравнением
 ,
,
где I - ток торможения; t - время; R - активное сопротивление обмоток электродвигателя; L - индуктивность обмоток электродвигателя; Kэ - коэффициент электромагнитной скоростной связи; Ω - угловая скорость вращения вала электродвигателя;
при этом в процессе работы первого электродвигателя на второй электродвигатель подают высокочастотный двухполярный сигнал, с амплитудой А и частотой ƒ, в результате чего второй электродвигатель возбуждает микроперемещения его выходного вала, валов тормозной и предохранительной муфт, валов дискретных датчиков угла, вала первого электродвигателя.
Духполярный сигнал может быть в виде или меандра, или синусоиды, или пилы.
При таком способе управления цифровой электромеханической следящей системой второй электродвигатель электромеханического привода возбуждает микроперемещения его выходного вала, валов тормозной и предохранительной муфт, валов дискретных датчиков угла, вала первого электродвигателя. В результате во всех элементах цифровой электромеханической следящей системы ликвидируются моменты сухого трения покоя, которые в 4-10 раз превосходят моменты сухого трения движения. За счет уменьшения моментов сухого трения уменьшаются ошибки слежения цифровой электромеханической следящей системы и увеличивается точность ее слежения.
Так как заявленная совокупность существенных признаков способа позволяет обеспечить технический результат, то заявленный способ соответствует критерию “изобретательский уровень”.
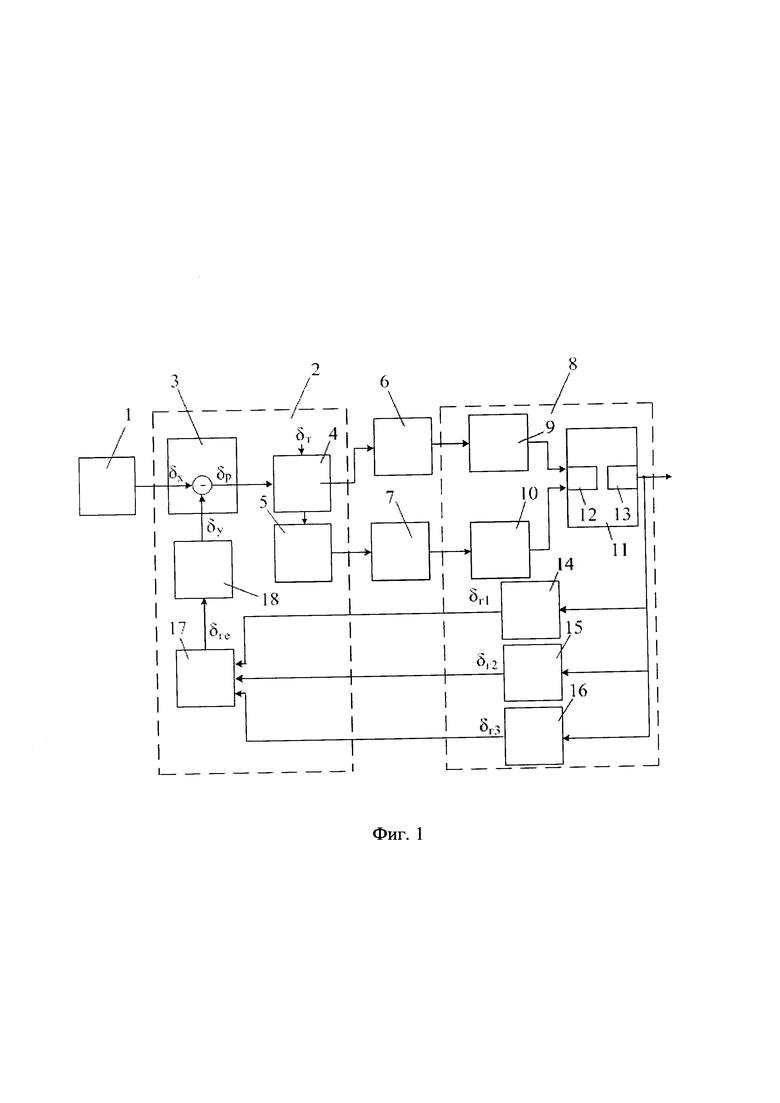
Суть способа поясняется с помощью фиг. 1, на которой изображена блок-схема цифровой электромеханической следящей системы с электромеханическим приводом, имеющим два электродвигателя и три дискретных датчика угла, на которой изображены:
1 - формирователь командного кода (ФКК);
2 - автономное вычислительное устройство (АВУ);
3 - блок определения сигнала рассогласования (БОСР);
4 - релейное пороговое устройство (РПУ);
5 - генератор двухполярного сигнала (ГДС);
6 - первое усилительно-преобразовательное устройство (УПУ1);
7 - второе усилительно-преобразовательное устройство (УПУ2);
8 - электромеханический привод (ЭМП);
9 - первый электродвигатель (ЭД1);
10 - второй электродвигатель (ЭД2);
11 - редуктор (Р);
12 - предохранительная муфта (ПМ);
13 - тормозная муфта (ТМ);
14 - первый дискретный датчик угла (ДДУ1);
15 - второй дискретный датчик угла (ДДУ2);
16 - третий дискретный датчик угла (ДДУ3);
17 - мажоритирующее устройство (МУ);
18 - преобразователь кода Грея в двоичный код (ПКГ);
δx - командный двоичный код;
δy - единый двоичный код обратной связи;
δp - двоичный код рассогласования;
δт - двоичный код точности поддержания требуемого положения;
δг1 - первый двоичный код Грея;
δг2 - второй двоичный код Грея;
δг3 - третий двоичный код Грея;
δге - единый код Грея обратной связи.
ФКК 1 связан с БОСР 3. БОСР 3 соединен РПУ 4 и ПКГ 18. РПУ 4 соединен с ГДС 5 и УПУ1 6. ГДС5 связан УПУ2 7. УПУ1 соединен с ЭД1 9, а УПУ2 соединен ЭД2 10. ЭД1 9 и ЭД2 10 подключены ЭМП 11 в состав которого входят ПМ 12 и Т13. С выходным валом ЭМП 11 соединены ДДУ1 14, ДДУ2 15, и ДДУ3 16, которые подключены к МУ 17, соединенному ПКГ 18. БОСР 3, РПУ 4, ГДС 5, ПКГ 18 и МУ 17 входят в состав АВУ 2.
В такой цифровой электромеханической системе в качестве ФКК 1 может быть использована цифровая вычислительная машина, БОСР 3 может быть выполнен на базе известных микросхем полусумматоров или полных сумматоров [3], при этом функции сравнения можно обеспечить за счет применения известных схем, реализующих функции равенства, строгого и нестрогого неравенства [4]. Преобразователь кода Грея ПКГ 18 может быть выполнен на базе известных микросхем арифметико-логических элементов [3]. РПУ 4 может быть выполнено на базе мультиплексора [3], электромагнитных реле и делителей напряжения. УПУ1 - УПУ1 6-7 могут быть выполнены на базе известных усилителей постоянного тока, например, на основе операционных усилителей [5], а ГДС может быть выполнен с помощью известных транзисторных схем мультивибраторов, блокинг-генераторов, генераторов синусоидального (RC или LC) и пилообразного напряжений [6].
При включении цифровой электромеханической следящей системы преобразуют сигналы напряжений в виде двоичных кодов Грея δг1, δг2, δг3 трех дискретных датчиков угла ДДУ1 14, ДДУ2 15, ДДУ3 16 в единый сигнал напряжения в виде кода Грея обратной связи δге в МУ 17, преобразуют его в сигнал напряжения в виде двоичного кода обратной связи δy в ПКГ 18.
Сравнивают сигнал напряжения в виде командного двоичного кода от ФКК 1 δx, соответствующий требуемому положению выходного вала ЭМП 7 в соответствии с циклограммой работы цифровой электромеханической следящей системы, с сигналом напряжения в виде двоичного кода обратной связи δy в БОСР 3 АВУ 2 и формируют в нем сигнал напряжения в виде двоичного кода рассогласования δp.
Сравнивают сигнал напряжения в виде двоичного кода рассогласования δp с заданной величиной сигнала напряжения в виде кода точности поддержания требуемого положения δт в РПУ 4 и при |δ|>δт преобразуют сигнал напряжения двоичного кода рассогласования δp в сигнал напряжения соответствующей коду рассогласования δp полярности в РПУ 4, усиливают его УПУ1 6 и подают на первый ЭД1 9 ЭМП 8, приводя во вращение вал ЭД2 10, вал Р 11, валы ПМ 12, ТМ 13, и валы ДДУ1 14, ДДУ2 15 и ДДУ3 16 ЭМП 8 системы в требуемом направлении, а при |δ|<δт прекращают подачу напряжения на ЭД1 9, ЭМП 8 и формируют в нем ток торможения, останавливая вращение валов ЭД1 9, ЭД2 10, вращение выходного вала Р 11, валов ПМ 12, ТМ 3 и валов ДДУ1 14, ДДУ2 15 и ДДУ3 16 ЭМП системы, при чем ток торможения определяется дифференциальным уравнением
 ,
,
где I - ток торможения; t - время; R - активное сопротивление обмоток электродвигателя; L - индуктивность обмоток электродвигателя; Kэ - коэффициент электромагнитной скоростной связи; Ω - угловая скорость вращения вала электродвигателя.
При этом в процессе работы ЭД1 9 на ЭД2 10 подают из ГДС 5 высокочастотный двухполярный сигнал в виде или меандра, или синусоиды, или пилы, с амплитудой А и частотой ƒ, в результате ЭД2 10 ЭМП 8 возбуждает микроперемещения выходного вала Р 11, валов ПМ 12, ТМ 13, валов ДДУ1 14, ДДУ2 15, ДДУ3 16 и вала ЭД1 9. В результате во всех элементах цифровой электромеханической следящей системы ликвидируются моменты сухого трения покоя, которые в 4-10 раз превосходят моменты сухого трения движения. За счет уменьшения моментов сухого трения уменьшаются ошибки слежения цифровой электромеханической следящей системы и увеличивается точность ее слежения.
Список литературы
1. Батоврин А.А., Дашевский П.Г., Лебедев В.Д. и др. Цифровые системы управления электроприводами. Л., «Энергия», 1977. 256 с. - аналог.
2. Белицкий Д.С., Жарков М.Н., Стоялов В.В., Шутенко В.И. / Электромеханический привод в системе управления режимами жидкостных ракетных двигателей. // Известия Академии наук. Теория и системы управления, 1996, №1, с. 118-124 - прототип.
3. Справочник по интегральным микросхемам / Б.В. Тарабрин, С.В. Якубовский, Н.А. Барканов и др., под ред. Б.В. Тарабрина. - 2-е изд. Перераб. и доп. М.: Энергия, 1981.
4. Токхейм Р. / Основы цифровой электроники. Пер. с англ. М.: Мир, 1988.
5. Алексеенко А.Г. и др. Применение прецизионных аналоговых микросхем / А.Г. Алексеенко, Е.А. Коломберт, Г.И. Стародуб. 2-е изд. перераб. и доп. М.: Радио и связь, 1983.
6. Герасимов В.Г., Князьков О.М., Краснопольский А.Е., Сухоруков В.В. Под редакцией В.Г. Герасимова. Основы промышленной электроники. Изд. 3-е перераб. и доп. М.: Высшая школа, 1986. 340 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ЦИФРОВОЙ ЭЛЕКТРОМЕХАНИЧЕСКОЙ СЛЕДЯЩЕЙ СИСТЕМОЙ | 2021 |
|
RU2771458C1 |
| СПОСОБ УПРАВЛЕНИЯ ЦИФРОВОЙ ЭЛЕКТРОМЕХАНИЧЕСКОЙ СЛЕДЯЩЕЙ СИСТЕМОЙ | 2021 |
|
RU2771459C1 |
| ЦИФРОВАЯ ЭЛЕКТРОГИДРАВЛИЧЕСКАЯ СЛЕДЯЩАЯ СИСТЕМА УПРАВЛЕНИЯ ПОЛОЖЕНИЕМ ОБЪЕКТА | 1998 |
|
RU2132080C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 1991 |
|
RU2029890C1 |
| СИСТЕМА УПРАВЛЕНИЯ ВЕКТОРОМ ТЯГИ ЖИДКОСТНОГО РАКЕТНОГО ДВИГАТЕЛЯ | 2021 |
|
RU2768637C1 |
| СИСТЕМА УПРАВЛЕНИЯ ПРИВОДОМ АНТЕННЫ | 1999 |
|
RU2184991C2 |
| ЦИФРОВАЯ ЭЛЕКТРОГИДРАВЛИЧЕСКАЯ СЛЕДЯЩАЯ СИСТЕМА УПРАВЛЕНИЯ ПОЛОЖЕНИЕМ ОБЪЕКТА | 2008 |
|
RU2374671C1 |
| СИСТЕМА УПРАВЛЕНИЯ РЕЖИМОМ ЖИДКОСТНОГО РАКЕТНОГО ДВИГАТЕЛЯ | 1997 |
|
RU2119186C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 1991 |
|
RU2029891C1 |
| ПРЕОБРАЗОВАТЕЛЬ УГЛА ПОВОРОТА ВАЛА В НАПРЯЖЕНИЕ | 1983 |
|
SU1840567A1 |
Изобретение относится к области машиностроения. Технический результат - уменьшение ошибок слежения цифровой электромеханической следящей системы и увеличение точности ее слежения. Для этого согласно способу управления цифровой электромеханической следящей системой преобразуют сигналы напряжения в виде двоичных кодов Грея δг1, δг2, δг3 трех дискретных датчиков угла в единый сигнал напряжения в виде кода Грея обратной связи, преобразуют его в сигнал напряжения в виде двоичного кода обратной связи, сравнивают с сигналом напряжения в виде двоичного кода обратной связи, формируют сигнал напряжения в виде двоичного кода рассогласования, сравнивают с заданной величиной сигнала напряжения в виде кода точности поддержания требуемого положения и подают на первый и второй электродвигатели электромеханического привода системы напряжения, управляя тем самым приводами электродвигателей. При этом в процессе работы первого электродвигателя на второй электродвигатель подают высокочастотный двухполярный сигнал с амплитудой А и частотой ƒ, что возбуждает микроперемещения его выходного вала, валов тормозной и предохранительной муфт, валов дискретных датчиков угла, вала первого электродвигателя. 1 ил.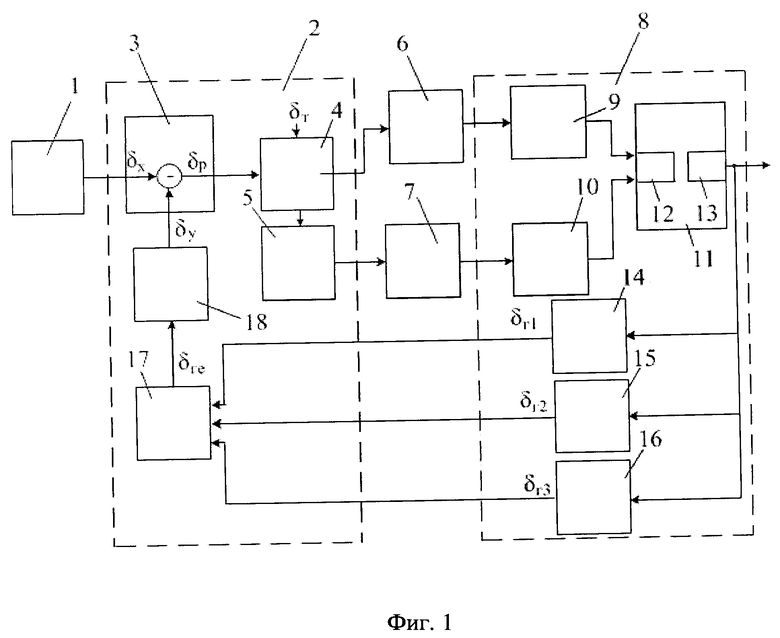
Способ управления цифровой электромеханической следящей системой, содержащий преобразование сигналов напряжений в виде двоичных кодов Грея δг1, δг2, δг3 трех дискретных датчиков угла в единый сигнал напряжения в виде кода Грея обратной связи δге, преобразование его в сигнал напряжения в виде двоичного кода обратной связи δy, сравнение командного сигнала напряжения в виде двоичного кода δx с сигналом напряжения в виде двоичного кода обратной связи δy, формирование сигнала напряжения в виде двоичного кода рассогласования δp, сравнение сигнала напряжения в виде кода рассогласования δp с заданной величиной сигнала напряжения в виде кода точности поддержания требуемого положения δт и подачу на первый и второй электродвигатели электромеханического привода системы напряжений, отличающийся тем, что при |δ|>δт преобразуют сигнал напряжения двоичного кода рассогласования δp в напряжение соответствующей коду рассогласования δp полярности, усиливают его и подают на первый электродвигатель электромеханического привода системы, приводя во вращение вал второго электродвигателя, вал редуктора, валы тормозной и предохранительной муфт и валы дискретных датчиков угла электромеханического привода системы в требуемом направлении, а при |δ|<δт прекращают подачу напряжения на первый электродвигатель электромеханического привода и формируют в нем ток торможения, останавливая вращение валов электродвигателей, вращение выходного вала редуктора, валов тормозной и предохранительной муфт и валов дискретных датчиков угла электромеханического привода системы, причем ток торможения определяется дифференциальным уравнением
 ,
,
где I - ток торможения; t - время; R - активное сопротивление обмоток электродвигателя; L - индуктивность обмоток электродвигателя; Kэ - коэффициент электромагнитной скоростной связи; Ω - угловая скорость вращения вала электродвигателя;
при этом в процессе работы первого электродвигателя на второй электродвигатель подают высокочастотный двухполярный сигнал с амплитудой А и частотой ƒ, в результате чего второй электродвигатель возбуждает микроперемещения его выходного вала, валов тормозной и предохранительной муфт, валов дискретных датчиков угла, вала первого электродвигателя.
| СПОСОБ УПРАВЛЕНИЯ ЦИФРОВОЙ ЭЛЕКТРОМЕХАНИЧЕСКОЙ СЛЕДЯЩЕЙ СИСТЕМОЙ | 2021 |
|
RU2771459C1 |
| СПОСОБ УПРАВЛЕНИЯ ЦИФРОВОЙ ЭЛЕКТРОМЕХАНИЧЕСКОЙ СЛЕДЯЩЕЙ СИСТЕМОЙ | 2021 |
|
RU2771458C1 |
| ЦИФРОВАЯ ЭЛЕКТРОГИДРАВЛИЧЕСКАЯ СЛЕДЯЩАЯ СИСТЕМА УПРАВЛЕНИЯ ПОЛОЖЕНИЕМ ОБЪЕКТА | 1998 |
|
RU2132080C1 |
| US 7696712 B2, 13.04.2010. | |||

