ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Изобретение относится к области вторичной радиолокации и может быть использовано во вторичных радиолокационных системах, осуществляющих наблюдение за воздушной, надводной, наземной обстановкой (ВРС наблюдения).
ВРС наблюдения в общем случае включает модуль управления, совокупность передающих, приемных, приемо-передающих терминалов вторичной радиолокации и совокупность ответчиков, размещенных на подвижных объектах. Каждому ответчику присваивается адресный признак.
Задача ВРС наблюдения состоит в обнаружении подвижных объектов, оборудованных ответчиками, определении их координат и идентификации по адресному признаку, построении трасс обнаруженных подвижных объектов. Указанные задачи ВРС наблюдения решает в некоторой области пространства, определяемой как зона наблюдения ВРС. Каждый из терминалов, входящих в состав ВРС наблюдения, имеет свою зону действия, пересекающуюся с зоной наблюдения.
УРОВЕНЬ ТЕХНИКИ
Определение координат подвижных объектов в ВРС наблюдения может осуществляться рядом известных способов [1]-[10]. В качествеаналога выберем способ определения координат подвижных объектов во вторичной радиолокационной системе наблюдения, приведенный в [9]. Способ состоит в следующем:
в состав вторичной радиолокационной системы наблюдения включают совокупность передающих терминалов с антеннами всенаправленного или секторного излучения, совокупность приемных терминалов с антеннами всенаправленного приема, модуль управления, взаимодействующий с передающими и приемными терминалами по каналам связи, совокупность ответчиков, размещенных на подвижных объектах;
каждому ответчику присваивают уникальный адресный признак;
в модуль управления, в передающие и приемные терминалы вводят шкалу единого времени;
фиксируют параметры зоны наблюдения вторичной радиолокационной системы наблюдения, параметры зон действия включенных в ее состав передающих и приемных терминалов, вводят указанные параметры в модуль управления;
передающие терминалы разносят друг относительно друга и размещают таким образом, чтобы каждая точка зоны наблюдения перекрывалась зоной действия хотя бы одного передающего терминала;
приемные терминалы разносят друг относительно друга и размещают таким образом, чтобы каждая точка зоны наблюдения перекрывалась зонами действия нескольких приемных терминалов, число которых превышает число определяемых координат ответчиков не менее чем на единицу;
координаты передающих и приемных терминалов вводят в модуль управления;
по командам модуля управления периодически осуществляют обзор зоны наблюдения вторичной радиолокационной системы наблюдения путем радиолокационных зондирований, на каждом из которых:
- в передающем терминале излучают запросный сигнал,
в ответчике, принявшем запросный сигнал, излучают ответный сигнал с адресным признаком этого ответчика,
в каждом приемном терминале, принявшем ответный сигнал, фиксируют и передают в модуль управления значение времени приема по шкале единого времени и адресный признак ответчика;
в модуле управления по совокупности значений времени приема ответного сигнала приемными терминалами осуществляют разностно-дальномерное определение координат ответчика и передают координаты вместе с адресным признаком для дальнейшего формирования трассы подвижного объекта, несущего данный ответчик;
обзор зоны наблюдения вторичной радиолокационной системы завершают, выполнив радиолокационные зондирования зон действия всех передающих терминалов.
Данный способ обладает рядом недостатков, основными из которых являются:
- малая дальность действия и помехоустойчивость вторичной радиолокационной системы наблюдения, что обусловлено применением в передающих и приемных терминалах антенн всенаправленного или секторного излучения и всенаправленного приема, которые обладают низким коэффициентом усиления;
наличие погрешности определения координат ответчиков (подвижных объектов), определяемой точностью синхронизации шкал времени в модуле управления и в приемных терминалах, причем величина погрешности прямо пропорциональна величине ошибки синхронизации;
- наличие погрешности разностно-дальномерного определения координат, зависящей от взаимного расположения ответчика и приемных терминалов, участвующих в определении координат, то есть от геометрического фактора.
Наиболее близким к заявляемому способу является способ определения координат подвижных объектов во вторичной радиолокационной системе наблюдения [10], выбранный в качестве прототипа.
Способ заключается в следующем:
в состав вторичной радиолокационной системы наблюдения включают совокупность приемо-передающих терминалов с направленными приемо-передающими антеннами, модуль управления, взаимодействующий с приемо-передающими терминалами по каналам связи, совокупность ответчиков, размещенных на подвижных объектах;
каждому ответчику присваивают уникальный адресный признак;
фиксируют параметры зоны наблюдения вторичной радиолокационной системы наблюдения, параметры зон действия включенных в ее состав приемо-передающих терминалов, вводят указанные параметры в модуль управления;
приемо-передающие терминалы разносят друг относительно друга и размещают таким образом, чтобы каждая точка зоны наблюдения перекрывалась зоной действия хотя бы одного приемо-передающего терминала;
координаты приемо-передающих терминалов вводят в модуль управления;
по командам модуля управления периодически осуществляют обзор зоны наблюдения вторичной радиолокационной системы наблюдения путем обзора зон действия приемо-передающих терминалов;
обзор зоны действия приемо-передающего терминала выполняют посредством ряда радиолокационных зондирований, на каждом из которых:
- в приемо-передающем терминале излучают через направленный луч антенны запросный сигнал,
в ответчике, принявшем запросный сигнал, излучают ответный сигнал с адресным признаком ответчика,
в приемо-передающем терминале, излучившем запросный сигнал, принимают через направленный луч антенны ответный сигнал, осуществляют радиолокационное определение координат, включающее оценку дальности и угловых координат ответчика относительно указанного терминала, определяют адресный признак ответчика и передают координаты и адресный признак в модуль управления для дальнейшего формирования трассы подвижного объекта, несущего указанный ответчик,
- луч антенны приемо-передающего терминала перемещают в очередное угловое положение и переходят к следующему зондированию;
обзор зоны действия приемо-передающего терминала завершают, выполнив радиолокационные зондирования всех ее участков;
обзор зоны наблюдения вторичной радиолокационной системы наблюдения завершают, выполнив обзор зон действия всех приемопередающих терминалов.
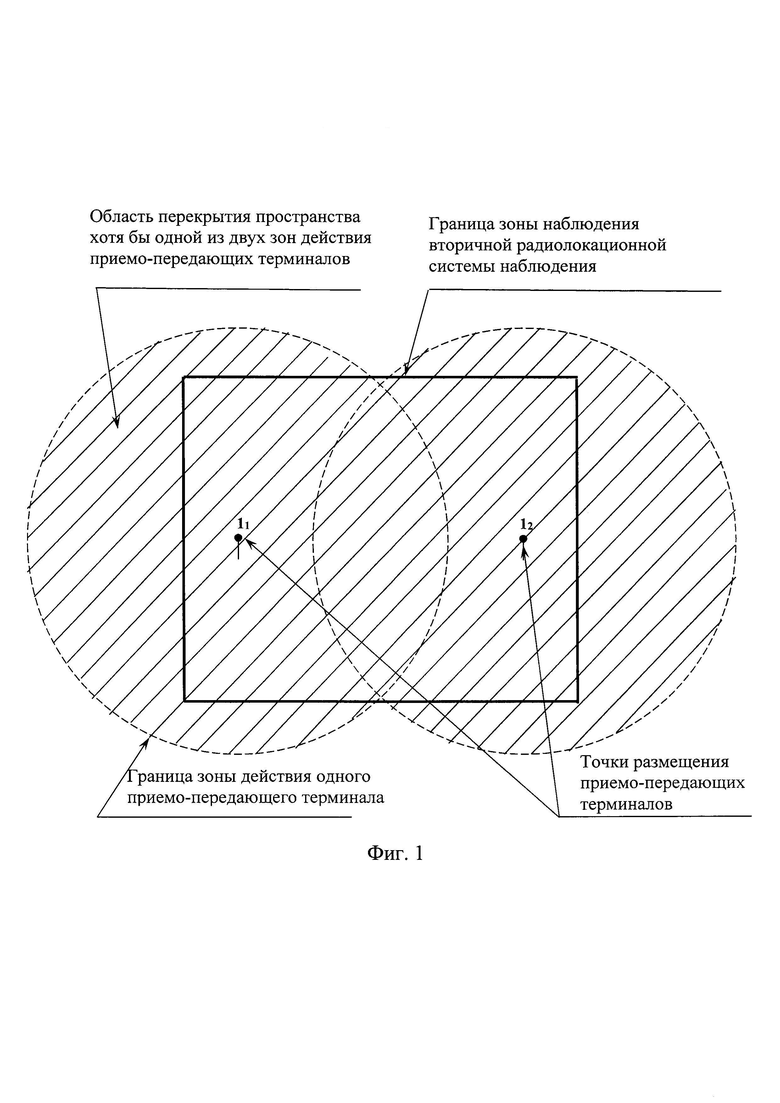
Фиг. 1, 2, 3 иллюстрируют работу способа-прототипа на примере ВРС наблюдения в составе двух приемо-передающих терминалов 11 и 12, модуля управления 4 и трех ответчиков 21, 22, 23. В каждом из терминалов осуществляют радиолокационное определение двух координат ответчиков - дальности и азимута - относительно терминала.
На фиг.1 приведены граница зоны наблюдения ВРС наблюдения, точки размещения двух входящих в систему разнесенных в пространстве приемо-передающих терминалов 11, 12, границы зоны действия каждого из указанных терминалов, а также отмечена область перекрытия пространства хотя бы одной из двух зон действия приемо-передающих терминалов.
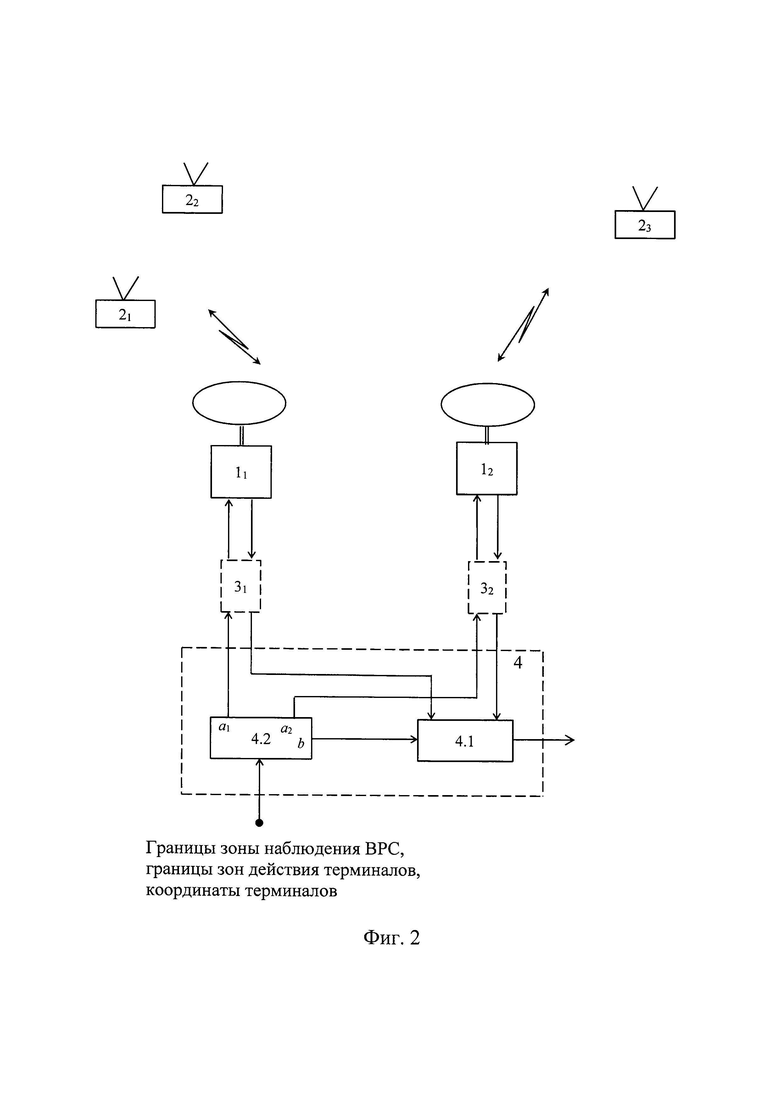
На фиг.2 приведена структурная схема вторичной радиолокационной системы наблюдения, включающая:
- два приемо-передающих терминала 11, 12;
три ответчика 21, 22, 23;
два канала связи 31 32;
модуль управления 4, в который входят:
блок вторичной обработки радиолокационной информации 4.1, координатные входы которого соединены через канал связи 31 - с координатным выходом приемо-передающего терминала h, через канал связи 32 - с координатным выходом приемо-передающего терминала 12
блок управления 4.2, выход а1 которого соединен через канал связи 31 с входом управления приемо-передающего терминала 11, выход а2 соединен через канал связи 32 с входом управления приемо-передающего терминала 12, выход b соединен с входом управления блока вторичной обработки радиолокационной информации 4.1.
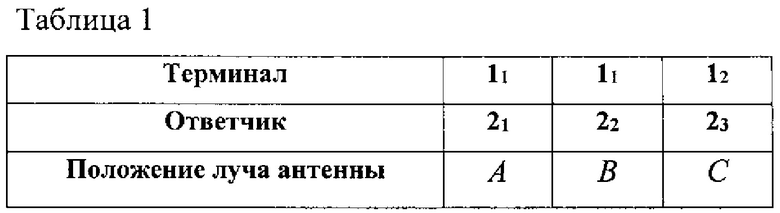
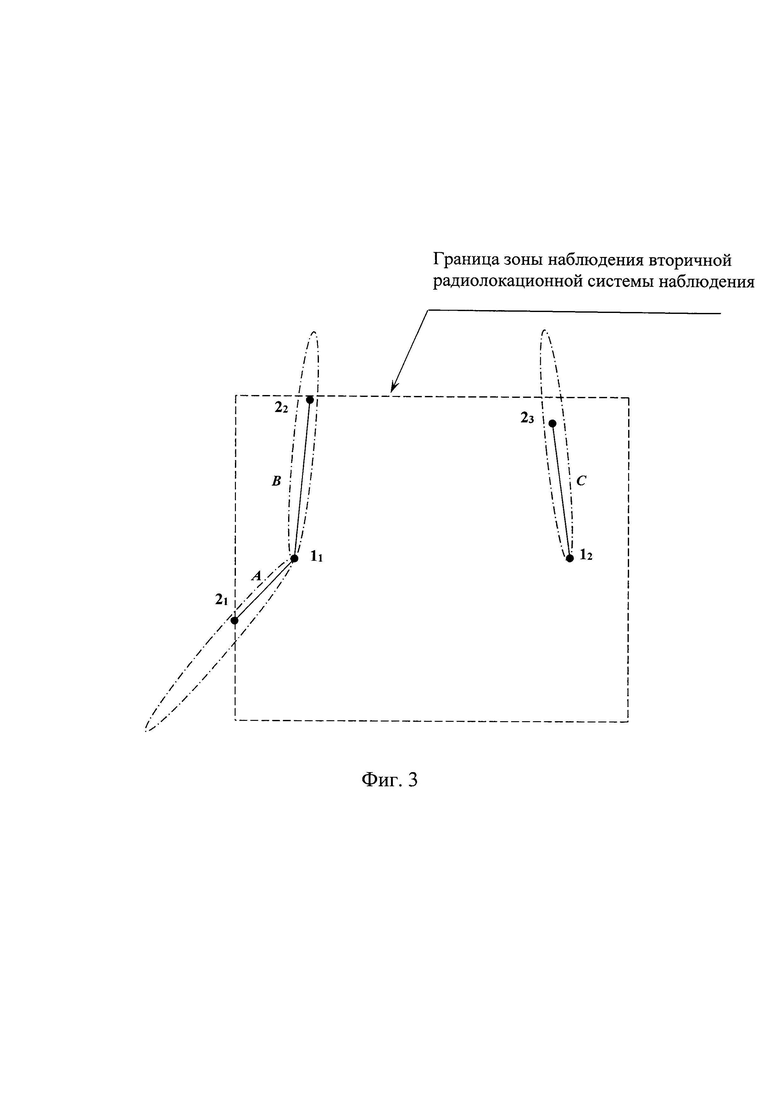
На фиг 3 показаны граница зоны наблюдения ВРС наблюдения, точки расположения приемо-передающих терминалов 11, 12, аналогичные приведенным на фиг. 1. Кроме того, отмечены:
- точки расположения ответчиков 21, 22, 23, причем ответчики 21, 22, расположены в зоне действия терминала 11, ответчик 23 - в зоне действия терминала 12;
- положение А луча антенны терминала 11 при зондировании направления на ответчик 21, положение В луча антенны терминала 11 при зондировании направления на ответчик 22, положение С луча антенны терминала 12 при зондировании направления на ответчик 23.
Для дальнейших расчетов масштаб изображений на фиг. 1, 3 примем равным 20 000 м в 1 см.
Описание работы способа-прототипа.
Приемо-передающие терминалы 11, 12 размещают таким образом (см. фиг. 1), что каждая точка зоны наблюдения попадает в зону действия хотя бы одного из этих терминалов.
Параметры (координаты границ) зоны наблюдения ВРС наблюдения, параметры (координаты границ) зон действия приемо-передающихтерминалов 11, 12, координаты точек размещения указанных терминалов вводят в блок управления 4.2 модуля управления 4.
По командам блока управления 4.2 модуля управления 4 (фиг. 2) приемо-передающие терминалы 11, 12 периодически осуществляют обзор своих зон действия путем выполнения последовательности радиолокационных зондирований.
На каждом зондировании приемо-передающий терминал излучает запросный сигнал при некотором угловом положении луча антенны. Если при зондировании, которое выполняет терминал 11, луч его антенны занимает угловое положение А, то запросный сигнал принимается ответчиком 21, если положение В - то ответчиком 22. Если при зондировании, которое выполняет терминал 12, луч его антенны занимает угловое положение С, то запросный сигнал принимается ответчиком 23 (см. фиг. 3, таблицу 1).
Каждый ответчик, принявший запросный сигнал, излучает ответный сигнал с адресным признаком ответчика.
В приемо-передающем терминале, излучившем запросный сигнал, ответный сигнал принимают, выполняют радиолокационное определение координат и фиксируют адресный признак ответчика.
Полученные оценки координат (дальности, азимута) ответчиков вместе с адресными признаками передают из терминалов 11, Ь по каналам связи 31, 32 в блок вторичной обработки радиолокационной информации 4.1 модуля управления 4 (фиг. 2), где по командам блока управления 4.2 формируют трассы подвижных объектов, несущих ответчики 21, 22, 23
Цикл определения координат завершают после выполнения обзора зон действия приемо-передающих терминалов 11, 12, следовательно, зоны наблюдения ВРС наблюдения в целом.
Способ-прототип избавлен от ряда недостатков приведенного выше способа-аналога, а именно:
- способ обеспечивает существенно большую максимальную дальность действия терминалов и помехоустойчивость ВРС наблюдения в целом, поскольку основан на использовании в терминалах антенн направленного излучения с коэффициентом усиления, как правило превышающим 30 дБ, против секторных и всенаправленных антенн с коэффициентом усиления не более 5 дБ, применяемых в способе-аналоге;
- способ не требует синхронизации шкал времени в модуле управления и в приемо-передающих терминалах и, следовательно, избавлен от погрешности определения координат, вызванной ошибками указанной синхронизации.
- в способе не присутствует геометрический фактор и, соответственно, вызываемая данным фактором погрешность, поскольку каждое радиолокационное определение координат осуществляется с участием единственного приемо-передающего терминала.
Вместе с тем, способ-прототип обладает существенным недостатком, состоящим в том, что ошибка определения координат ответчика возрастает с увеличением дальности от приемо-передающего терминала до ответчика. Подтвердим на рассматриваемом примере.
Приемо-передающие терминалы 11, 12 (фиг. 3) осуществляют радиолокационное определение координат ответчиков 21, 22 23-дальности d в линейных единицах, со среднеквадратичной ошибкой σd, и азимута βугл. в угловых единицах, со среднеквадратичной ошибкой σβугл.
В качестве меры ошибки радиолокационного определения координат примем круговое вероятное отклонение Rp/л. Для определения еговеличины переведем  в среднеквадратичную ошибку в линейных
в среднеквадратичную ошибку в линейных
единицах  измеренную вдоль линии, проходящей через точку
измеренную вдоль линии, проходящей через точку
ответчика в горизонтальной плоскости по нормали к направлению “ответчик-терминал”:

С учетом данного выражения величину кругового вероятного отклонения Rp/л можно записать в виде [11]:

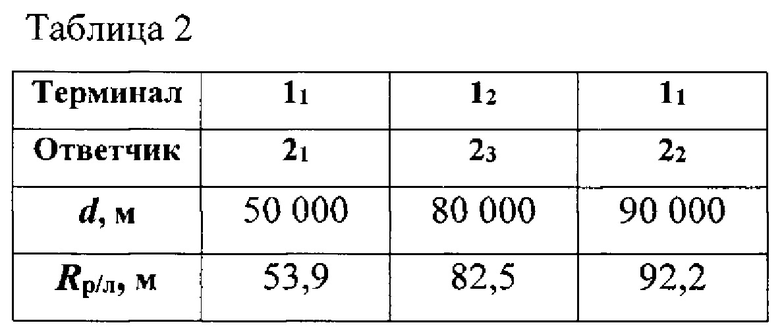
В таблице 2 приведены значения ошибок Rp/л для сочетаний терминалов и ответчиков в соответствии с фиг.3 в зависимости от дальности d, вычисленные по формуле (1). Приняты типовые значения исходных ошибок σd=20 м,  угл. мин. при масштабе 20 000 м в 1 см.
угл. мин. при масштабе 20 000 м в 1 см.
Как видно из таблицы 2, величина кругового вероятного отклонения увеличивается с ростом дальности по закону, близкому к линейному. Вследствие этого частично нивелируется преимущество способа-прототипа по отношению к способу-аналогу в дальности действия терминалов. Фактическая дальность действия приемо-передающего терминала, при которой погрешность измерения координат не превышает некоторой заранее заданной допустимой границы, оказывается существенно меньше его максимальной дальности действия. Например, если бы максимальная дальность действия приемо-передающего терминала в рассматриваемом примере составляла 400 км, а максимальная допустимая погрешность Rp/л =100 м, то фактическую дальность действия терминала пришлось бы ограничить величиной ~ 100 км.
РАСКРЫТИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
Целью изобретения является повышение точности определения координат подвижных объектов во вторичной радиолокационной системе наблюдения.
Для достижения указанной цели в известный способ определения координат подвижных объектов во вторичной радиолокационной системе наблюдения, заключающийся в том, что:
в состав вторичной радиолокационной системы наблюдения включают совокупность приемо-передающих терминалов с направленными приемо-передающими антеннами, модуль управления, взаимодействующий с приемо-передающими терминалами по каналам связи, совокупность ответчиков, размещенных на подвижных объектах;
каждому ответчику присваивают уникальный адресный признак;
фиксируют параметры зоны наблюдения вторичной радиолокационной системы наблюдения, параметры зон действия включенных в ее состав приемо-передающих терминалов, вводят указанные параметры в модуль управления;
приемо-передающие терминалы разносят друг относительно друга, координаты каждого из них вводят в модуль управления;
по командам модуля управления периодически осуществляют обзор зоны наблюдения вторичной радиолокационной системы наблюдения путем обзора зон действия приемо-передающих терминалов;
обзор зоны действия приемо-передающего терминала выполняют посредством ряда радиолокационных зондирований, на каждом из которых:
- в приемо-передающем терминале излучают через направленный луч антенны запросный сигнал,
- в ответчике, принявшем запросный сигнал, излучают ответный сигнал с адресным признаком ответчика,
- в приемо-передающем терминале, излучившем запросный сигнал, принимают через направленный луч антенны ответный сигнал, осуществляют радиолокационное определение координат, включающее оценки дальности и угловых координат ответчика относительно указанного терминала, определяют адресный признак ответчика и передают координаты и адресный признак в модуль управления,
- луч антенны приемо-передающего терминала перемещают в очередное угловое положение и переходят к следующему зондированию;
обзор зоны действия приемо-передающего терминала завершают, выполнив радиолокационные зондирования всех ее участков;
обзор зоны наблюдения вторичной радиолокационной системы наблюдения завершают, выполнив обзор зон действия всех приемопередающих терминалов,
предлагается ввести следующую дополнительную последовательность действий:
разнесенные друг относительно друга приемо-передающие терминалы размещают таким образом, чтобы каждая точка зоны наблюдения перекрывалась зонами действия ряда терминалов, количество которых не меньше числа определяемых координат ответчика;
в модуль управления вводят:
- характеристики погрешности оценок дальности и угловых координат ответчика приемо-передающими терминалами,
- выражение ошибки радиолокационного определения координат ответчика приемо-передающим терминалом в зависимости от дальности до ответчика с учетом введенных характеристик погрешности,
- выражение для дальномерного определения координат ответчика по значениям оценок дальности ответчиков относительно приемопередающих терминалов,
- выражение ошибки дальномерного определения координат ответчика в зависимости от взаимного расположения ответчика и приемопередающих терминалов, выполняющих оценки дальности, с учетом введенных характеристик погрешности;
в модуле управления оценки координат, полученные от приемопередающих терминалов в течение одного обзора зоны наблюдения, вместе с координатами самих терминалов группируют по признаку единства адресного признака ответчика;
в каждой из групп:
- из радиолокационных определений координат выделяют оценки дальности и выполняют дальномерное определение координат,
- вычисляют ошибки радиолокационных определений координат и ошибку дальномерного определения координат,
- по результатам вычислений определяют оценку координат с минимальной ошибкой и передают данную оценку для дальнейшего формирования трассы подвижного объекта, несущего ответчик с относящимся к группе адресным признаком.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
Фиг. 4-8 иллюстрируют работу предлагаемого способа на примере ВРС наблюдения в составе четырех приемо-передающих терминалов 11,12,13,14 и трех ответчиков 21,22,23,. Параметры зоны наблюдения ВРС, зон действия терминалов, позиции терминалов 11,12, и ответчиков 21,22,23подобны приведенным на фиг. 1, 3 при иллюстрации способа-аналога. В каждом из терминалов осуществляют радиолокационное определение двух координат ответчиков - дальности и азимута - относительно терминала.
На фиг.4 приведена зона наблюдения ВРС наблюдения, показаны точки размещения терминалов 11,12,13,14 приведены границы зон действия указанных терминалов. Терминалы разнесены в пространстве таким образом, чтобы каждая точка зоны наблюдения оказалась в зоне действия не менее чем двух (по числу определяемых координат ответчиков) приемо-передающих терминалов. Отмечена область перекрытия пространства двумя и более из четырех зон действия приемопередающих терминалов.
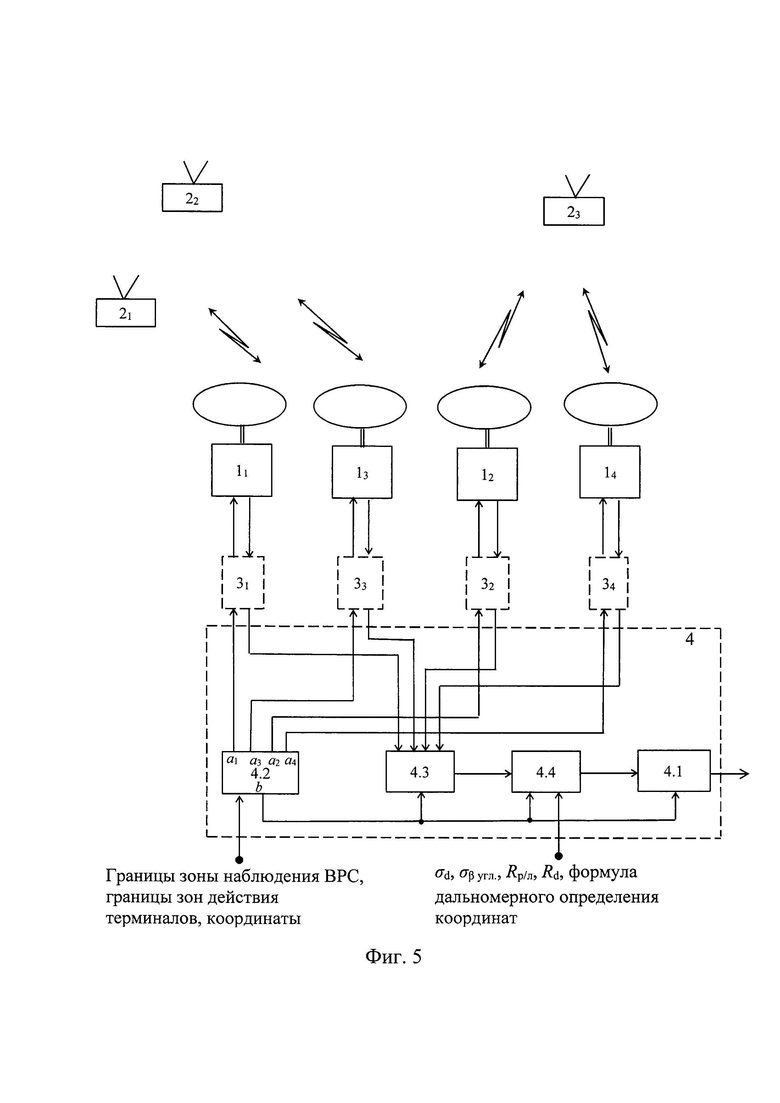
На фиг. 5 приведена структурная схема вторичной радиолокационной системы наблюдения, реализующей предлагаемый способ.
В структурную схему включены:
четыре приемо-передающих терминала 11,12,13,14;
три ответчика 21, 22, 23;
четыре канала связи 31,32,33,34;
модуль управления 4 в составе:
блока вторичной обработки радиолокационной информации 4.1,
блока управления 4.2,
блока группирования координатной информации 4.3,
блока обработки координатной информации 4.4.
Сигнальный вход блока вторичной обработки радиолокационной информации 4.1 модуля управления 4 соединен с выходом блока обработки координатной информации 4.4 модуля управления 4, выход является выходом ВРС в целом.
Выходы а1, а2, а3, а4 блока управления 4.2 модуля управления 4 соединены через каналы связи 31,32,33,34 с входами управления приемопередающих терминалов 11,12,13,14 соответственно. Выход b блокауправления 4.2 модуля управления 4 соединен с входами управления блоков вторичной обработки радиолокационной информации 4.1, группирования координатной информации 4.3, обработки координатной информации 4.4 модуля управления 4.
Координатный выход каждого из приемо-передающих терминалов 11,12,13,14 через соответствующий канал связи 31, 32, 33 или 34 соединен с одним из сигнальных входов блока группирования координатной информации 4.3 модуля управления 4.
Выход блока группирования координатной информации 4.3 соединен с координатным входом блока обработки координатной информации 4.4 модуля управления 4.
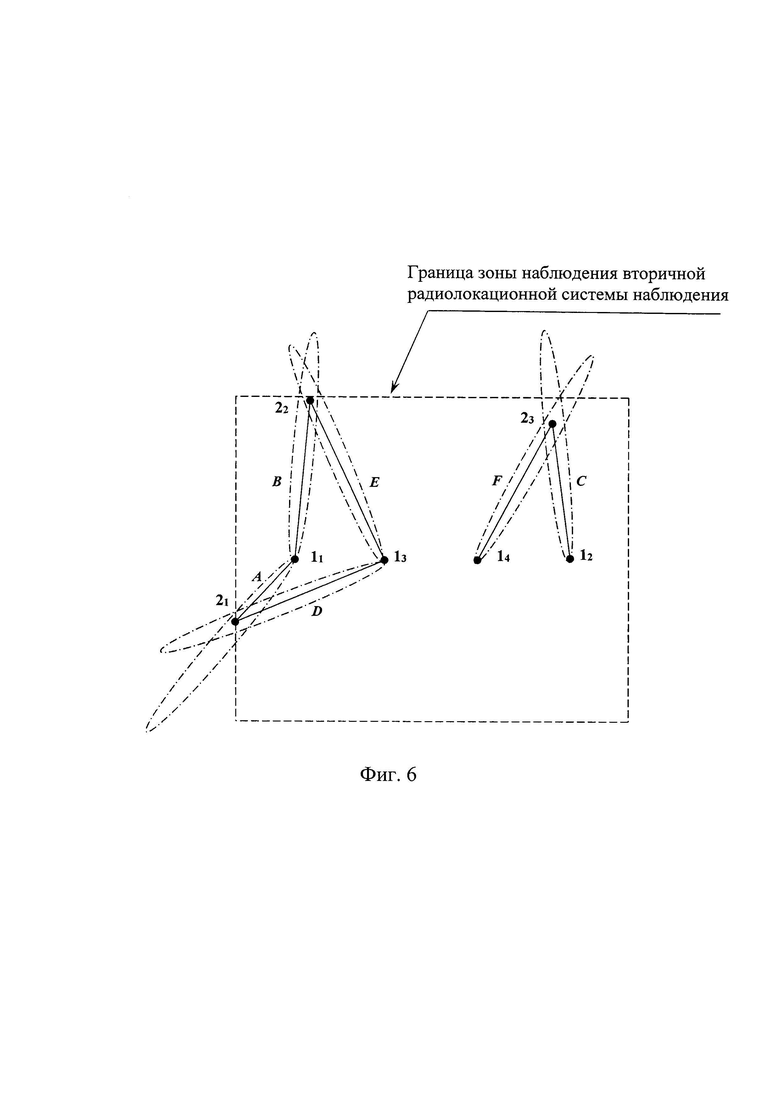
На фиг. 6 показаны границы зоны наблюдения ВРС наблюдения, точки расположения приемо-передающих терминалов 11,12,13,14, аналогичные приведенным на фиг. 4. Кроме того, отмечены:
- точки расположения ответчиков 21,22,23, причем ответчики 21, 22 расположены в зоне действия терминалов 11,13,, ответчик 23 - в зоне действия терминалов 12,14;
положение А луча антенны терминала 11 при зондировании направления на ответчик 21, положение В луча антенны терминала 11 при зондировании направления на ответчик 2 г, положение С луча антенны терминала 12 при зондировании направления на ответчик 23;
положение D луча антенны терминала 13 при зондировании направления на ответчик 21 положение Е луча антенны терминала 13 при зондировании направления на ответчик 22, положение F луча антенны терминала 14 при зондировании направления на ответчик 23.
Масштаб изображений на фиг. 4, 6 аналогичен масштабу изображений на фиг.1, 3 - 20 ООО м в 1 см.
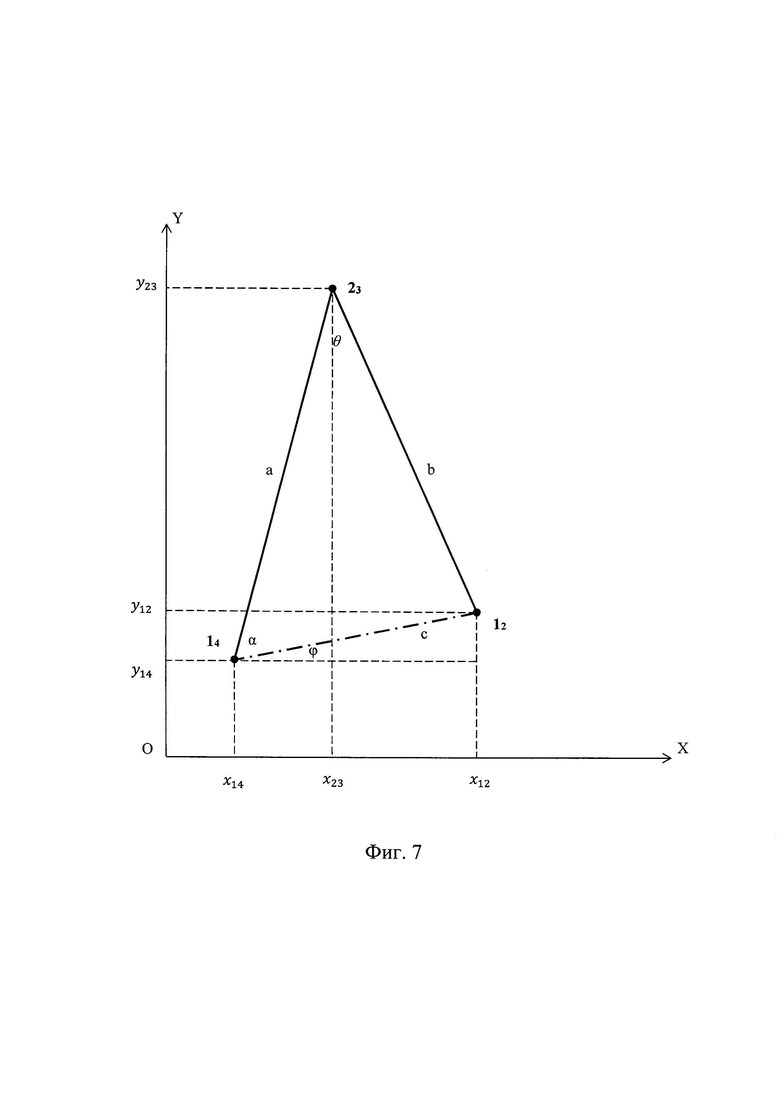
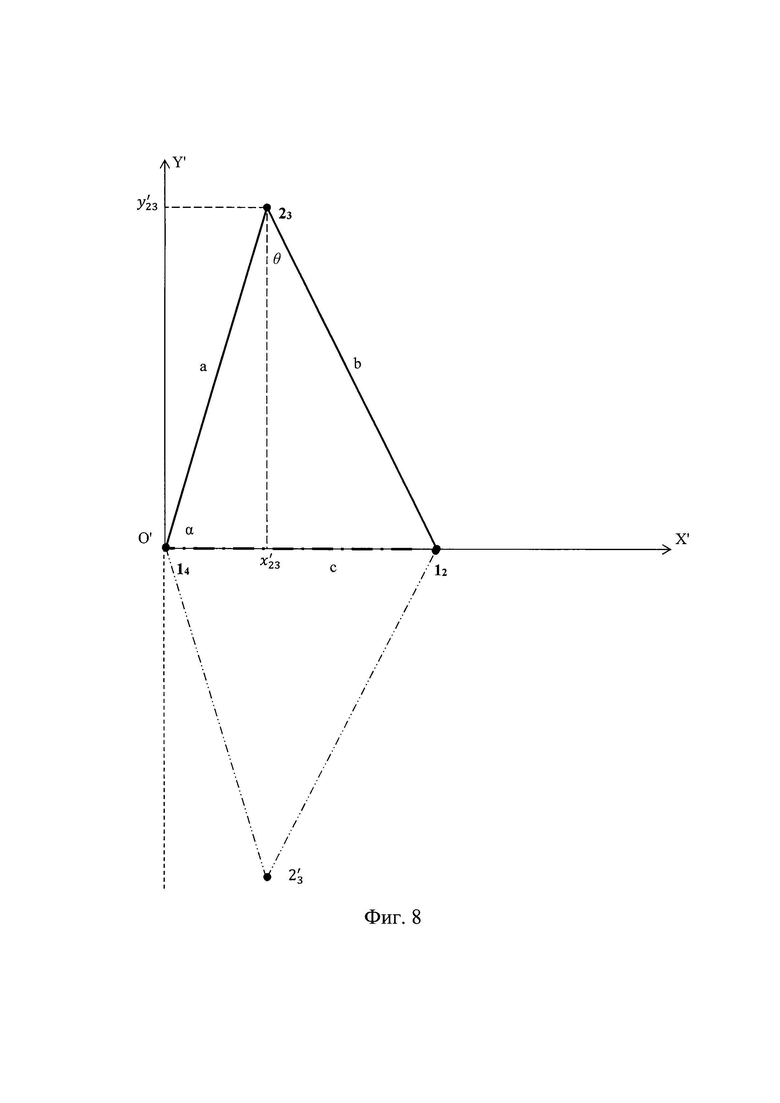
На фиг.7 показан фрагмент зоны наблюдения, приведенной на фиг.6, который включает точки расположения приемо-передающих терминалов 14,12 и ответчика 23 в некоторой рабочей прямоугольной системекоординат XOY. На фиг.8 показан тот же фрагмент во вспомогательной системе координат XʹOʹY, в которой начало координат О смещено в точку Оʹ расположения терминала 14, а оси X, Y повернуты на угол ϕ таким образом, чтобы отрезок (12-14), лежал на оси ОʹХʹ. Показана также точка 2ʹ3, симметричная точке 2з относительно отрезка (12-14). Описание работы предлагаемого способа.
В блок управления 4.2 модуля управления 4 вводят, используя рабочую систему координат XOY, следующие данные:
- параметры (координаты границ) зоны наблюдения вторичной радиолокационной системы наблюдения;
- параметры (координаты границ) зон действия приемо-передающих терминалов 11,12, 13,14;
- координаты точек размещения указанных терминалов.
В блок обработки координатной информации 4.4 модуля управления 4 вводят следующие данные.
A) Характеристики погрешности - среднеквадратичные ошибки
оценок дальности σd, и угловых координат σβугл ответчика приемопередающими терминалами.
Б) Выражение ошибки радиолокационного определения координат ответчика приемо-передающим терминалом - кругового вероятного отклонения Rр/л (1) - как функции дальности до ответчика с учетом введенных характеристик погрешности.
B) Выражение для дальномерного определения координат ответчика.
Выведем данное выражение на примере определения координат {х23, у23) ответчика 23 в рабочей системе координат XOY при использовании терминалов 14,12 (фиг. 7).
Обозначим:
а, b - измеренные дальности ответчика 23 относительно приемопередающих терминалов 14 и12- длины отрезков (14-23), (12-23);
с - расстояние между терминалами 14-12 - длина отрезка (14-12);
α - угол между отрезками (14-23) и (14-12) в треугольнике (14-23-12);
ϕ - угол между осью ОХ и отрезком (14-12).
Введем вспомогательную систему координат XʹOʹYʹ (фиг. 8).
Из треугольника (14-23-12) следует: cos α=(а2+с2-b2)/2ас.
Обозначим (а2+с2-b2)/2ac=D, при этом cos α=D, sin α=(1-D2)1/2
Тогда из треугольника (14-23-хʹ23) в системе координат XʹOʹYʹ получим:

Искомое выражение для дальномерного определения координат получим после обратного перехода в систему координат XOY:

Формулы (2), (3) как нетрудно убедиться, справедливы также для антипода точки 23-точки 2ʹ3 расположения гипотетического ответчика (фиг.8), симметричной относительно отрезка (I4-I2), что могло бы вызвать неоднозначность оценки координат истинного ответчика.
В предлагаемом способе неоднозначность устраняется благодаря использованию направленных антенн, в рассматриваемом примере - за счет фиксации луча антенны терминала 14 в положении F и/или луча антенны терминала 12 положении С (фиг. 6) при выполнении процедуры определения координат данного ответчика. (Отметим, что при использовании в приемных терминалах всенаправленных антенн, как в приведенном выше способе-аналоге, для устранения неоднозначности потребовалось бы использование дополнительного терминала).
Г) Выражение ошибки дальномерного определения координат -кругового вероятного отклонения Rd- в зависимости от влияниягеометрического фактора. Круговое вероятное отклонение Rd можно определить по формуле [11]:

где θ-угол между направлениями (14-23), (12-23) (фиг. 7, 8).
Из треугольника (14-23-12) получаем:
cos θ={a2+b2-c2)/2ab, при этом:

Значение угла в может использоваться как показатель геометрического фактора. Из формулы (4) следует, что при фиксированной величине σd наилучшим является геометрический фактор, при котором в=90°, а ошибка определения координат (круговое вероятное отклонение) достигает максимума - Rd=1,41×σd Чем хуже геометрический фактор, тем больше значение угла в отличается от 90°, и тем больше значение Rd.
По командам блока управления 4.2 модуля управления 4 (фиг. 5) приемо-передающие терминалы периодически осуществляют обзор своих зон действия путем выполнения последовательности радиолокационных зондирований, сопровождаемых изменениями угловой ориентации луча антенн.
На зондировании терминал излучает запросный сигнал. Если луч антенны терминала направлен в сторону ответчика (фиг. 6), данный ответчик принимает запросный сигнал и излучает ответный сигнал с адресным признаком ответчика.
В терминале, излучившем запросный сигнал, принимают ответный сигнал, осуществляют радиолокационное определение координат, включающее оценку дальности и азимута ответчика в системе координат, связанной с терминалом, определяют адресный признак ответчика.
Результаты радиолокационного определения координат на зондировании вместе с адресными признаками ответчиков передают из терминалов 11, 12, 13, 14 по каналам связи 31, 32, 33, 34 в блок группирования координатной информации 4.3 модуля управления 4 (фиг. 5).
Далее луч антенны терминала перемещают в угловой сектор, в котором на данном обзоре сигнал запроса еще не излучался, и выполняют очередное зондирование. Последовательность зондирований продолжают подобным образом до полного перекрытия зоны действия терминала, после чего обзор зоны действия считают завершенным.
Обзор зоны наблюдения завершают после выполнения обзора зон действия всех входящих в ВРС наблюдения приемо-передающих терминалов.
После завершения каждого обзора зоны наблюдения в блоке группирования координатной информации 4.3 модуля управления 4 поступившие в процессе обзора радиолокационные координаты вместе с координатами передавших их приемо-передающих терминалов разделяют на группы, в каждую из которых включают информацию, относящуюся к ответчику с одним адресным признаком. Координаты пересчитывают в рабочую систему координат XOY.
Информацию групп передают в блок обработки координатной информации 4.4 модуля управления 4, в котором на основании ранее введенных характеристик и выражений выполняют для каждой группы:
- выделение оценок дальности в радиолокационных определениях, дальномерное определение координат по выражению (3) на основании выделенных оценок дальности;
- вычисление ошибок радиолокационных определений координат по формуле (1) и дальномерного определения координат по формуле (4ʹ);
- совместный анализ результатов радиолокационных и дальномерного определений координат, формирование итоговой оценки координат, передача итоговой оценки с адресным признаком ответчика вблок вторичной обработки радиолокационной информации 4.1 модуля управления 4.
Возможный алгоритм совместного анализа и формирования оценки координат ответчика заключается в следующем.
A. Выбирают для эффективной оценки координат критерий минимума кругового вероятного отклонения Rmin.
Б. Применяют выбранный критерий к совокупности результатов радиолокационных определений, выделяют оценки координат с минимальным для совокупности круговым вероятным отклонением Rʹр/л.
B. Применяют выбранный критерий к совместным результатам радиолокационного и дальномерного определений, выделяют оптимальную оценку координат ответчика, для которой:

Г. Передают выделенную оценку координат с адресным признаком ответчика в блок вторичной обработки радиолокационной информации 4.1 модуля управления 4 для формирования по командам блока управления 4.2 модуля управления 4 трасс подвижных объектов, несущих ответчики и выдачи данной информации потребителям.
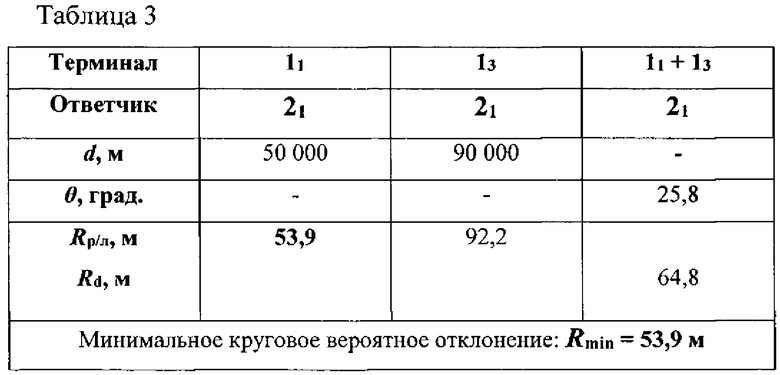
Значения , Rр/л Rd, Rmin, вычисленные для рассматриваемого примера по формулам (1), (4ʹ) с использованием приведенного алгоритма, а также значения величин d, θ приведены в таблицах 3, 4, 5

Предлагаемый способ, сохраняя и развивая достоинства способа-прототипа - возможность достижения значительной дальности действия при высокой помехоустойчивости, отсутствие ошибки синхронизации - обеспечивает существенно более высокую точность определения координат ответчиков, что подтверждается, в частности, приведенным выше примером.
Рассмотрим определение координат ответчика 21 при реализации предлагаемого способа. Отличительными признаками расположения ответчика 21 является незначительное удаление (d=50 000 м) от ближайшего приемо-передающего терминала 11 и плохой геометрический фактор (θ=25,8°) по отношению к терминалам 1] и Ь (см. фиг.6, таблицу 3). При этом погрешность радиолокационного определения координат составляет Rр/л=53,9 м, погрешность дальномерного определении координат - Rd=64,8 м. Выбирается оценка координат с минимальнойпогрешностью Rр/л=53,9 м, которая в данном случае совпадает с погрешностью оценки координат того же ответчика в ВРЛ, реализующей способ-прототип (фиг. 3, таблица 2).
Рассмотрим определение координат ответчиков 22, 2з при реализации предлагаемого способа. Отличительными признаками расположения данных ответчиков (см. фиг. 6, таблицы 4, 5) в сравнении с ответчиком 21 являются:
- несколько увеличенное удаление от ближайших приемопередающих терминалов - ответчика 22 от терминала 11 (d=90 000 м), ответчика 23 от терминала 12 (d=80 000 м);
несколько лучший геометрический фактор - ответчика 22 с терминалами li и 1з (θ=30,0°), ответчика 23 с терминалами 14 и 12 (θ=33,5°).
При этом погрешность радиолокационного определения координат ответчика 22 составляет Rр/л=92,2 м, дальномерного определении - Rd=56,4 м, погрешность радиолокационного определения координат ответчика 23 составляет Rр/л=82,5 м, дальномерного определения - Rd=51,0 м.
Выбирается оценка координат с минимальной погрешностью: для ответчика 22-Rd-56,4 м, для ответчика 23-Rd=51,0 м. Как видно из фиг. 3 и таблицы 2, погрешности оценки координат подобных ответчиков в ВРЛ, реализующей способ-прототип, составляют: для ответчика 22-Rр/л=92,2 м, для ответчика 23-Rр/л=82,5 м.
Результаты рассмотрения подтверждают, что при показателях геометрического фактора, которые считают нормальными - θ от 30° до 90°, от 90° до 150° преимущество в точности определения координат с ростом дальности достаточно быстро переходит от радиолокационного к многопозиционному.
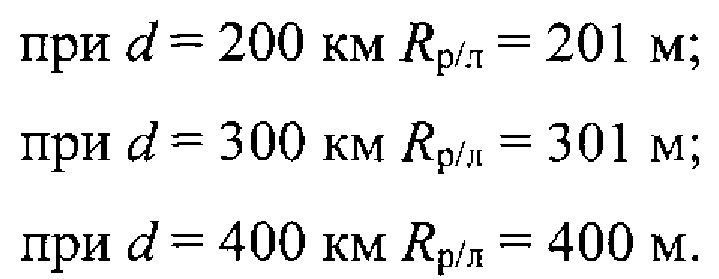
Так, в рассмотренном примере при увеличении дальности значения погрешности Rр/л для способа-прототипа составят:
при d=100 км Rр/л=102 м;
Считая, что значения показателя геометрического фактора находятся в интервале θ от 30° до 150°, значения погрешности Rd для предлагаемого способа при тех же дальностях составят от 28 м до 56 м в предположении, что максимальная дальность действия приемо-передающего терминала равна или превышает 400 км.
Соответственно выигрыш в точности составит:
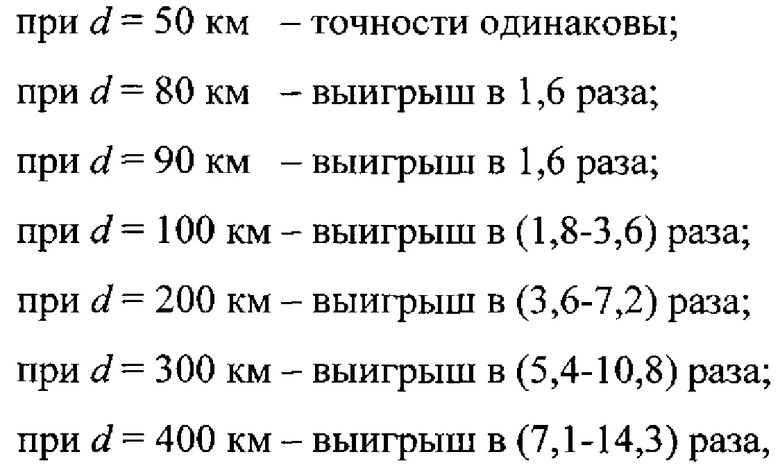
что подтверждает достижение поставленной цели.
Таким образом, предлагаемый способ дает существенный выигрыш в точности определения координат ответчиков и подвижных объектов, на которых указанные ответчики установлены, причем выигрыш возрастает с увеличением дальности от ответчика до участвующих в определении координат приемо-передающих терминалов.
Отметим что, несмотря на необходимость наложения зон действия приемо-передающих терминалов друг на друга с кратностью, равной числу определяемых координат, количество терминалов, требуемое для перекрытия зоны наблюдения ВРС при реализации предлагаемого способа, не превысит, а может оказаться и меньше, чем число терминалов, требуемых для реализации способа-прототипа. Действительно, в предлагаемом способе терминалы могут использоваться на максимальную дальность действия, в то время как в способе-прототипе фактическаядальность действия, как было отмечено выше, не должна превышать величину, при которой погрешность определения координат выходит за рамки допустимой.
Отметим также, что в предлагаемом способе геометрический фактор не вызывает избыточной погрешности, поскольку проявляется только в тех случаях, когда ошибка радиолокационного определения координат, не связанного с геометрическим фактором, превышает ошибку дальномерного определения.
Список литературы
1. Secondary Radar Ranging Systems. US Patent №3772693, Filed Nov. 17, 1970.
2. Precision Landing System. US Patent №5017930, Filed Jan. 25, 1990.
3. The use of Geometric Dilution of Precision (GDOP) for selecting the best receiver group in a multilateration system. EU Patent №1927864, Date of filing 01.08.2007 r.
4. ИКАО. Приложение 10 к Конвенции о международной гражданской авиации. Авиационная электросвязь, том IV, "Системы наблюдения и предупреждения столкновений", издание пятое, июль 2014 г. Разделы 3.1.1, 3.1.2.
5. Система вторичной радиолокации для управления воздушным движением. Патент РФ на изобретение №2535604, зарегистрирован в Государственном реестре изобретений РФ 10.06.2010 г.
6. Многопозиционная система посадки воздушных судов. Патент РФ на изобретение №2489325, зарегистрирован в Государственном реестре изобретений РФ 30.08.2011 г.
7. Многопозиционная система посадки воздушных судов. Патент РФ на изобретение №2558412, зарегистрирован в Государственном реестре изобретений РФ 05.06.2014 г.
8. Многопозиционная система определения местоположения воздушных судов. Патент РФ на изобретение №2584689, зарегистрирован в Государственном реестре изобретений РФ 11.11.2014 г.
9. ICAO, Doc 9924, Aeronautical Surveillance Manual, Second Edition, 2017, Appendix L.
10. ICAO, Doc 9684, Manual on the Secondary Surveillance Radar (SSR) Systems, Third Edition, 2004, Chapters 1, 5, 7.
11. A.B. Баженов, Г.И. Захаренко, A.H. Бережнов, К.Ю. Савченко. Радионавигационные системы. Учебное пособие. Издание Ставропольского военного института имени маршала авиации В.А. Судца. Ставрополь, 2007.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ ОТНОСИТЕЛЬНОГО ПОЛОЖЕНИЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ ПРИ МЕЖСАМОЛЕТНОЙ НАВИГАЦИИ | 2015 |
|
RU2606241C1 |
| ВЕРТОЛЕТНЫЙ РАДИОЛОКАЦИОННЫЙ КОМПЛЕКС | 2007 |
|
RU2344439C1 |
| Многопозиционная система посадки воздушных судов | 2015 |
|
RU2608183C1 |
| СИСТЕМА ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2023 |
|
RU2809110C1 |
| СПОСОБ МЕСТООПРЕДЕЛЕНИЯ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЯ И ПАССИВНАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ, ИСПОЛЬЗУЕМАЯ ПРИ РЕАЛИЗАЦИИ ЭТОГО СПОСОБА | 2004 |
|
RU2275649C2 |
| Моноимпульсная вторичная радиолокационная система с режимом S | 2013 |
|
RU2606386C2 |
| ДАЛЬНОМЕРНАЯ РАДИОТЕХНИЧЕСКАЯ СИСТЕМА БЛИЖНЕЙ НАВИГАЦИИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2011 |
|
RU2478979C1 |
| МНОГОПОЗИЦИОННАЯ СИСТЕМА ПОСАДКИ ВОЗДУШНЫХ СУДОВ | 2011 |
|
RU2489325C2 |
| МНОГОДИАПАЗОННЫЙ ВЕРТОЛЕТНЫЙ РАДИОЛОКАЦИОННЫЙ КОМПЛЕКС | 2012 |
|
RU2497145C1 |
| АЭРОМОБИЛЬНЫЙ КОМПЛЕКС С БЕСПИЛОТНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ ВЕРТОЛЕТНОГО ТИПА | 2022 |
|
RU2792314C1 |

Изобретение относится к области вторичной радиолокации и может быть использовано во вторичных радиолокационных системах, осуществляющих наблюдение за воздушной, надводной, наземной обстановкой. Техническим результатом является повышение точности определения координат подвижных объектов. В заявленном способе во вторичной радиолокационной системе наблюдения, содержащей совокупность ответчиков, размещенных на подвижных объектах, модуль управления и совокупность пространственно разнесенных приемо-передающих терминалов с направленными антеннами, осуществляющих радиолокационное определение координат - дальности и угловых координат - ответчиков и определение их адресов, терминалы размещают таким образом, чтобы каждая точка зоны наблюдения системы перекрывалась их зонами действия, количество которых не меньше числа определяемых координат. В модуле управления из радиолокационных определений координат выделяют оценки дальности и выполняют дальномерное определение координат. Оценивают ошибки радиолокационных и дальномерного определений координат, определяют оценку координат с минимальной ошибкой и передают ее для дальнейшей обработки информации. 8 ил., 5 табл.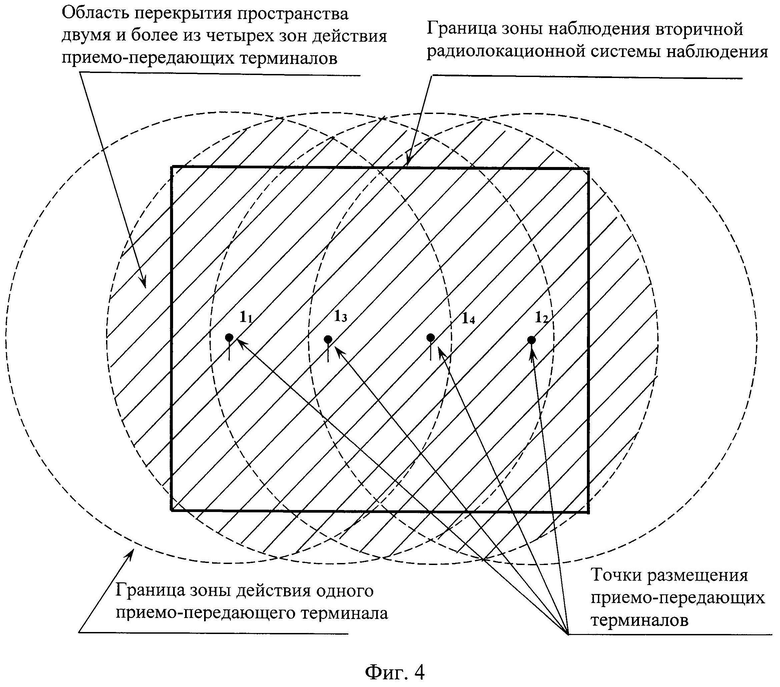
Способ определения координат подвижных объектов во вторичной радиолокационной системе наблюдения, заключающийся в том, что:
в состав вторичной радиолокационной системы наблюдения включают совокупность приемо-передающих терминалов с направленными приемо-передающими антеннами, модуль управления, взаимодействующий с приемо-передающими терминалами по каналам связи, совокупность ответчиков, размещенных на подвижных объектах;
каждому ответчику присваивают уникальный адресный признак;
фиксируют параметры зоны наблюдения вторичной радиолокационной системы наблюдения, параметры зон действия включенных в ее состав приемо-передающих терминалов, вводят указанные параметры в модуль управления;
приемо-передающие терминалы разносят относительно друг друга, координаты каждого из них вводят в модуль управления;
по командам модуля управления периодически осуществляют обзор зоны наблюдения вторичной радиолокационной системы наблюдения путем обзора зон действия приемо-передающих терминалов;
обзор зоны действия приемо-передающего терминала выполняют посредством ряда радиолокационных зондирований, на каждом из которых:
- в приемо-передающем терминале излучают через направленный луч антенны запросный сигнал,
- в ответчике, принявшем запросный сигнал, излучают ответный сигнал с адресным признаком ответчика,
- в приемо-передающем терминале, излучившем запросный сигнал, принимают через направленный луч антенны ответный сигнал, осуществляют радиолокационное определение координат, включающее оценку дальности и угловых координат ответчика относительно указанного терминала, определяют адресный признак ответчика и передают координаты и адресный признак в модуль управления,
- луч антенны приемо-передающего терминала перемещают в очередное угловое положение и переходят к следующему зондированию;
обзор зоны действия приемо-передающего терминала завершают, выполнив радиолокационные зондирования всех ее участков;
обзор зоны наблюдения вторичной радиолокационной системы наблюдения завершают, выполнив обзор зон действия всех приемо-передающих терминалов,
отличающийся тем, что:
разнесенные относительно друг друга приемо-передающие терминалы размещают таким образом, чтобы каждая точка зоны наблюдения перекрывалась зонами действия ряда терминалов, количество которых не меньше числа определяемых координат ответчика;
в модуль управления вводят:
- характеристики погрешности оценок дальности и угловых координат ответчика приемо-передающими терминалами,
- выражение ошибки радиолокационного определения координат ответчика приемо-передающим терминалом в зависимости от дальности до ответчика с учетом введенных характеристик погрешности,
- выражение для дальномерного определения координат ответчика по значениям оценок дальности ответчиков относительно приемо-передающих терминалов,
- выражение ошибки дальномерного определения координат ответчика в зависимости от взаимного расположения ответчика и приемо-передающих терминалов, выполняющих оценки дальности, с учетом введенных характеристик погрешности;
в модуле управления оценки координат, полученные от приемо-передающих терминалов в течение одного обзора зоны наблюдения,
вместе с координатами самих терминалов группируют по признаку единства адресного признака ответчика;
в каждой из групп:
- из радиолокационных определений координат выделяют оценки дальности и выполняют дальномерное определение координат,
- вычисляют ошибки радиолокационных определений координат и ошибку дальномерного определения координат,
- по результатам вычислений определяют оценку координат с минимальной ошибкой и передают данную оценку для дальнейшего формирования трассы подвижного объекта, несущего ответчик с относящимся к группе адресным признаком.
| Система для определения координат цели в системе запрос-ответ | 2021 |
|
RU2778018C1 |
| ICAO, Doc 9684, Manual on the Secondary Surveillance Radar (SSR) Systems, Third Edition | |||
| Способ приготовления мыла | 1923 |
|
SU2004A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| МНОГОПОЗИЦИОННАЯ СИСТЕМА ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ВОЗДУШНЫХ СУДОВ | 2014 |
|
RU2584689C1 |
| СИСТЕМА ВТОРИЧНОЙ РАДИОЛОКАЦИИ ДЛЯ УПРАВЛЕНИЯ ВОЗДУШНЫМ ДВИЖЕНИЕМ | 2010 |
|
RU2535604C2 |
| EP 1927864 A1, 04.06.2008 | |||
| CN 113589346 A, 02.11.2021 | |||
| US 5017930 A, 21.05.1991. | |||

