Изобретение относится к системам управления беспилотными летательными аппаратами (БИЛА) и может быть использована при разработке интеллектуальных мобильных систем управления БИЛА.
Известен патент “Многоцелевой беспилотный летательный аппарат” (патент РФ №181026, Многоцелевой беспилотный летательный аппарат / Еленев В.Д., Назаров А.А., Овакимян Д.Н., МПК В64С 39/02, B64D 17/80, B64D 1/14, опубликованный 03.07.2018 Бюл. №19). Беспилотный летательный аппарат представляет собой однофюзеляжный моноплан. Аппарат выполнен с высокорасположенным крылом, которое представлено в виде двух полукрыльев. Стабилизатор хвостового оперения разнесенный двукилевой, съемный. Парашют и надувной буфер расположены в верхней и нижней части фюзеляжа соответственно. Бортовое оборудование включает в себя: систему автоматического управления; радиомодем; трубку приемника воздушного давления; аппаратуру полезной нагрузки (сменная и размещена во внутреннем пространстве фюзеляжа); аэронавигационные огни и солнечные панели (расположены на крыльях); бак на 12 литров (выполнен из композитных материалов); силовую установку, размещенную в передней части фюзеляжа, и установленную там же рулевую машинку управления двигателем, а также генератор, установленный на валу двигателя. Техническим результатом полезной модели является обеспечение возможности длительного, безаварийного проведения экологического мониторинга, патрулирования лесов, линий электропередач, нефте- и газопроводов.
Недостатками данного устройства является большой уровень шума от работающего двигателя и пропеллеров.
Известен патент “Ротор "ВОЗДУШНОЕ КОЛЕСО". Гиростабилизированный летательный аппарат и ветроэнергетическая установка, использующие ротор "ВОЗДУШНОЕ КОЛЕСО", наземное/палубное устройство их запуска (патент РФ №22538737, Ротор "ВОЗДУШНОЕ КОЛЕСО". Гиростабилизированный летательный аппарат и ветроэнергетическая установка, испульзующие ротор "ВОЗДУШНОЕ КОЛЕСО", наземное/палубное устройство их запуска / КУЗИКОВ С.Ю., МИК В64С 27/32, опубликованный 10.01.2015 Бюл. №1). Ротор с лопастями изменяемого шага и изменяемой крутки содержит замкнутое крыло, соединенное гибкими на кручение лопастями с одной или несколькими коаксиальными втулками, причем соединение лопастей с замкнутым крылом выполнено жестким, упругим или упруговязким. Ротор содержит устройство управления общим/циклическим шагом лопастей, которые задаются, частично или полностью, относительным положением (поворотом, наклоном, смещением) втулок. Гибкие на кручение лопасти имеют изменяемую вогнутость профиля, при этом жесткость лопастей, на кручение и/или поперечный изгиб, переменная вдоль лопасти. Лопасти имеют сложную трехмерную форму: изгибы, расширения, сужения, расщепления, сопряжения, подкосы, отклоняемые предкрылки и/или закрылки. Подвижное крепление лопастей к одной или нескольким втулкам выполнено через торсион, или через осевой, или смещенный осевой шарнир. Крепление лопастей к втулке может быть выполнено жестким, при этом лопасти имеют отклоняемый закрылок. Ротор может применяться в ветроэнергетической установке. Достигается увеличение скорости винтокрылого летательного аппарата. Отмечается снижение уровня шумов за счет использование оригинальной конструкции
Недостатками данного устройства является сложность конструкции.
Наиболее близким по технической сущности к заявленной системе является выбранное в качестве прототипа “Интеллектуальная система автоматического управления беспилотным летательным аппаратом” (патент РФ №200039 U1, Интеллектуальная система автоматического управления беспилотным летательным аппаратом / Зеленский В. А., Овакимян Д.Н., Серпуховитов С.С., МИК G05D 1/00, опубликованный 01.10.2020 Бюл. №28). Устройство состоит из гироскопа, акселерометра, магнитометра, барометра, ультразвукового сонара, выходы которых соединены с первым входом устройства комплексирования, а выход приемника спутниковых сигналов соединен со вторым входом устройства комплексирования 7. Выход сканирующего лидара и первый выход модуля памяти соединены со входом устройства сравнения, а второй выход модуля памяти, а также выходы интерфейса оперативного управления и устройства мониторинга нештатных ситуаций соединены со входом устройства выбора и коррекции маршрута.
Недостатками данного устройства является отсутствие шумоподавления.
Задачей изобретения является разработать устройство, которое позволило снизить уровень шума БПЛА и при этом обладало простой конструкцией с возможностью оперативного управления БПЛА.
Поставленная задача достигается тем, что устройство автоматического управления беспилотным летательным аппаратом с подавлением шума содержит гироскоп, акселерометр, магнитометр, барометр, ультразвуковой сонар, приемник спутниковых сигналов, модуль памяти, интерфейс оперативного управления, устройство мониторинга нештатных ситуаций, интерфейс устройств управления движением, выход которого соединен со входом устройств управления движением, устройство комплексирования, к первому входу которого подключены выходы гироскопа, акселерометра, магнитометра, барометра, ультразвукового сонара, а ко второму входу подключен выход приемника спутниковых сигналов, устройство сравнения, ко входам которого подключены выход сканирующего лидара и первый выход модуля памяти, устройство выбора и коррекции маршрута, ко входам которого подключены второй выход модуля памяти, выходы интерфейса оперативного управления и устройства мониторинга нештатных ситуаций, причем выходы устройства комплексирования, устройства сравнения и устройства выбора и коррекции маршрута соединены со входами нейронного процессора, выход которого подключен ко входу интерфейса устройств управления движением, согласно изобретению введен блок микрофонов, выходы которого соединены со входами блока усилителей, выходы которых соединены с входами блока аналогово-цифровых преобразователей, соединенных с микроконтроллером, который соединен с входами нейронного процессора и блоком цифро-аналоговых преобразователей, выходы которых соединены с блоком динамиков, при этом дополнительно введен блок температурных датчиков, выходы которого соединены с входами нейронного процессора.
Сущность изобретения поясняется чертежом, где представлена структурная схема устройства.
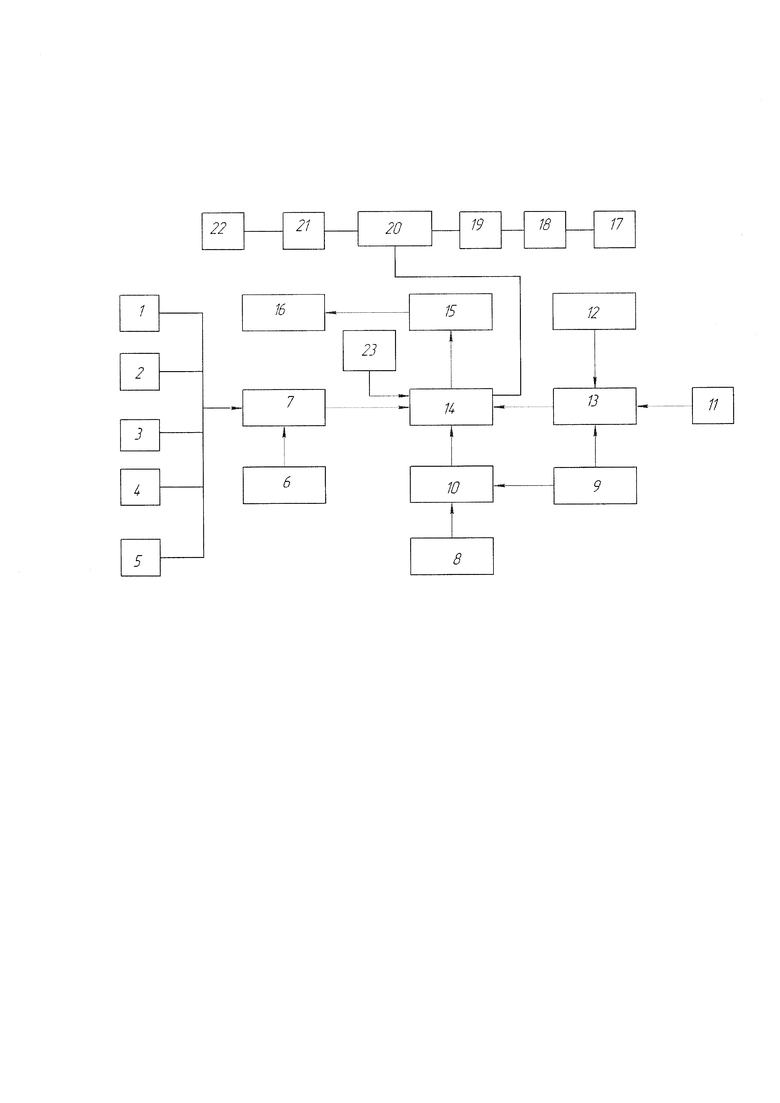
Устройство состоит из гироскопа 1, акселерометра 2, магнитометра 3, барометра 4, ультразвукового сонара 5, приемника спутниковых сигналов 6, устройства комплексирования 7, сканирующего лидара 8, модуля памяти 9, устройства сравнения 10, модуля памяти 9, интерфейса оперативного управления 11, устройства мониторинга нештатных ситуаций 12, устройства выбора и коррекции маршрута 13, нейронного процессора 14, интерфейса исполнительных устройств 15, устройства управления движением 16, блока микрофонов 17, блока усилителей 18, блока аналогово-цифровых преобразователей 19, микроконтроллера 20, блока цифро-аналоговых преобразователей 21, блока динамиков 22, блока температурных датчиков 23.
Выходы гироскопа 1, акселерометра 2, магнитометра 3, барометра 4, ультразвукового сонара 5 соединены с первым входом устройства комплексирования 7, а выход приемника спутниковых сигналов 6 соединен со вторым входом устройства комплексирования 7. Выход сканирующего лидара 8 и первый выход модуля памяти 9 соединены со входом устройства сравнения 10, а второй выход модуля памяти 9, а также выходы интерфейса оперативного управления 11 и устройства мониторинга нештатных ситуаций 12 соединены со входом устройства выбора и коррекции маршрута 13. Выходы устройства комплексирования 7, устройства сравнения 10 и устройства выбора и коррекции маршрута 13 соединены со входами нейронного процессора 14. Вход интерфейса исполнительных устройств 15 соединен с выходом нейронного процессора 15, а выход подключен ко входам устройств управления движением 16. Выход блока микрофонов 17 соединен со входом блока усилителей 18, выход которого соединен со входом блока аналогово-цифрового преобразователей 19. Выход блока аналогово-цифрового преобразователей 19 соединен с микроконтроллером 20, который соединен с входами нейронного процессора 14 и входами блоком цифро-аналоговых преобразователей 21. Выходы блока цифро-аналоговых преобразователей 21 соединены с входами блока динамиков 20. Выход блока температурных датчиков 23 соединены с входами нейронного процессора 15.
Устройство работает следующим образом. С гироскопа 1, акселерометра 2, магнитометра 3, барометра 4, ультразвукового сонара 5 информация об угловой скорости, линейном ускорении, направлении движения и высоте БПЛА поступает на первый вход устройства комплексирования 7, реализованного на основе фильтра Калмана. На второй вход устройства комплексирования 7 с выхода приемника спутниковых сигналов 6 поступает навигационная информация с ГЛОНАСС, GPS или другой глобальной навигационной спутниковой системы. В случае стабильного приема спутникового сигнала, навигация БПЛА может осуществляться по сигналам глобальной спутниковой системы связи. В случае отсутствия спутникового сигнала из-за особенностей географического ландшафта, случайных обстоятельств или преднамеренного воздействия навигация БПЛА осуществляется с помощью навигационных датчиков, т.е. в автономном режиме. При появлении сигналов спутниковой связи траектория движения БПЛА корректируется с помощью устройства комплексирования 7, в котором учитываются как показания датчиков 1-5, так и приемника 5 спутниковых сигналов 6. Комплексирование сигналов датчиков и сигналов спутниковой связи повышает достоверность навигационных данных в условиях воздействия внешних факторов. Дополнительная навигационная информация поступает со сканирующего лидара 8, который формирует двумерную или трехмерную картину окружающего пространства. Далее, в устройстве сравнения 10 происходит сопоставление этой картины с электронной картой местности, предварительно загруженной в модуль памяти 9. В зоне радиосвязи в полетное задание могут вноситься изменения с помощью интерфейса оперативного управления И. Для предотвращения конфликтных ситуаций выходы модуля памяти 9 и интерфейса оперативного управления 11 подключены к входам устройства выбора и коррекции маршрута 13. Устройство мониторинга нештатных ситуаций 12 отслеживает состояние и работоспособность всех узлов системы управления, сигнализирую в случае опасности (например, низкий уровень заряда аккумуляторной батареи) об этом в устройство выбора и коррекции маршрута 13.
Для аппаратного ускорения алгоритмов работы нейронных сетей в процессе управления БПЛА применен нейронный процессор 14. Интеллектуальная обработка информации, поступающей в нейронный процессор 14 с выходов устройства комплексирования 7, устройства сравнения 10, микроконтроллера 20, блока температурных датчиков 23 и устройства выбора и коррекции маршрута 13 позволяет повысить вероятность принятия правильного решения в случае воздействия внешних факторов или возникновения нештатных ситуаций.
Управляющие сигналы с выхода нейронного процессора 14 через интерфейс устройств управления движением 15 поступают на устройства управления движением 16. В случае БПЛА вертолетного типа (мультикоптера) устройства управления движением 16 представляют собой три и более несущих винта. Маневрирование осуществляется путем изменения скорости вращения винтов.
Блока микрофонов 17 состоит из нескольких микрофонов, которые производят измерение шума, производимого винтами БПЛА и окружающей средой. Сигнал с блока микрофонов 17 усиливается в блоке усилителей 18 и переводится из аналогового в цифровой вид в блоке аналогово-цифровых преобразователей 19. Микроконтроллер 20 анализирует информацию с аналогово-цифровых преобразователей 19 и формирует электрические сигналы в цифровом виде, которые в блоке цифро-аналоговых преобразователей 21 преобразуются в аналоговые электрические сигналы. В блоке динамиков 22 происходит преобразования электрических сигналов в звуковые сигналы излучаемые в окружающее пространство.
Микроконтроллер 21 формирует сигналы для блока динамиков 22 в двух режимах. В обоих режимах микроконтроллер 21 сначала выполняет операцию быстрого преобразования Фурье, тем самым находится спектр сигналов от каждого микрофона из блока микрофонов 17.
В первом режиме, формируется сигнал, в спектре которого присутствуют гармонические составляющие спектра измеренного сигнала, но при этом каждая гармоническая составляющая спектра выходного сигнала сдвинута на угол 180 градусов. Далее происходит сложение измеренного и излученного акустического сигнала в окружающем пространстве вокруг БПЛА, при этом происходит снижение уровня шума.
Во втором режиме, для каждого гармонического воздействия из полученного спектра формируется сигнал, в спектре которого частоты смещены на 1/10 Гц, тем самым в окружающем пространстве создается ощущение для человека, который отслеживает БПЛА по звуку, что БПЛА летает вокруг человека (Мандельштам Л.И. Лекции по теории колебаний. - М. -Издательство «Наука», 1972.).
Блок температурных датчиков 23 состоит из нескольких датчиков температуры, которые измеряют температуру окружающей среды и элементов конструкции БПЛА. Полученные данные о температурах передаются в нейронный процессор 14, который на основе полученной 7 информации вносит корректировки в движение БПЛА и корректируют работу микроконтроллера 20, так как температура и давление воздуха влияют на процесс распространения акустического сигнала.
Преимуществом устройства является возможность снизить уровень шума БПЛА и возможность легко модифицировать форму излучаемого акустического колебания за счет использования нескольких динамиков и совместной работы микроконтроллера 20 и нейронного процессора 14.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ТОЧНОЙ ПОСАДКИ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2016 |
|
RU2615587C9 |
| ИНТЕГРИРОВАННЫЙ КОМПЛЕКС БОРТОВОГО ОБОРУДОВАНИЯ МАЛОРАЗМЕРНОГО БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2023 |
|
RU2820041C1 |
| АВИАЦИОННАЯ СИСТЕМА ОБРАБОТКИ ДАННЫХ АЭРОСЪЕМКИ ДЛЯ ОПРЕДЕЛЕНИЯ ОПТИМАЛЬНЫХ ЗОН И УПРАВЛЕНИЯ РЕЖИМАМИ РАБОТЫ ЦЕЛЕВЫХ НАГРУЗОК БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2024 |
|
RU2840814C1 |
| КОМПЛЕКС РАСПРЕДЕЛЕННОГО УПРАВЛЕНИЯ ИНТЕЛЛЕКТУАЛЬНЫМИ РОБОТАМИ ДЛЯ БОРЬБЫ С МАЛОГАБАРИТНЫМИ БЕСПИЛОТНЫМИ ЛЕТАТЕЛЬНЫМИ АППАРАТАМИ | 2019 |
|
RU2717047C1 |
| Беспилотный аппарат и комплекс наблюдения для него | 2016 |
|
RU2642202C1 |
| БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ КОМПЛЕКС | 2023 |
|
RU2810956C1 |
| Беспилотный летательный комплекс | 2024 |
|
RU2836414C1 |
| БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ И КОМПЛЕКС АВИАНАБЛЮДЕНИЯ ДЛЯ НЕГО | 2012 |
|
RU2518440C2 |
| Способ точной посадки беспилотного летательного аппарата и устройство для реализации способа | 2021 |
|
RU2773978C1 |
| СПОСОБ И СИСТЕМА НАВИГАЦИИ ПАССАЖИРСКОГО ДРОНА В ГОРНОЙ МЕСТНОСТИ | 2018 |
|
RU2681278C1 |
Устройство автоматического управления беспилотным летательным аппаратом (БПЛА) с подавлением шума содержит гироскопа, акселерометр, магнитометр, барометр, ультразвуковой сонар, приемник спутниковых сигналов, устройство комплексирования, сканирующий лидар, модуль памяти, устройство сравнения, интерфейс оперативного управления, устройство мониторинга нештатных ситуаций, устройство выбора и коррекции маршрута, нейронный процессор, интерфейс исполнительных устройств, устройство управления движением, блок микрофонов, блок усилителей, блок аналогово-цифровых преобразователей, микроконтроллер, блок цифро-аналоговых преобразователей, блок динамиков, блок температурных датчиков, соединенные определенным образом. Обеспечивается снижение уровня шума БПЛА, упрощение конструкции и повышение оперативности управления. 1 ил.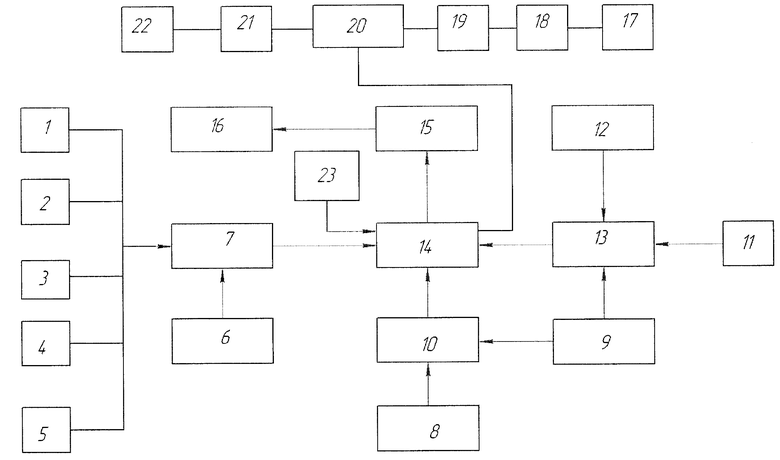
Устройство автоматического управления беспилотным летательным аппаратом с подавлением шума, содержащая гироскоп, акселерометр, магнитометр, барометр, ультразвуковой сонар, приемник спутниковых сигналов, модуль памяти, интерфейс оперативного управления, устройство мониторинга нештатных ситуаций, интерфейс устройств управления движением, выход которого соединен со входом устройств управления движением, устройство комплексирования, к первому входу которого подключены выходы гироскопа, акселерометра, магнитометра, барометра, ультразвукового сонара, а ко второму входу подключен выход приемника спутниковых сигналов, устройство сравнения, ко входам которого подключены выход сканирующего лидара и первый выход модуля памяти, устройство выбора и коррекции маршрута, ко входам которого подключены второй выход модуля памяти, выходы интерфейса оперативного управления и устройства мониторинга нештатных ситуаций, причем выходы устройства комплексирования, устройства сравнения и устройства выбора и коррекции маршрута соединены со входами нейронного процессора, выход которого подключен ко входу интерфейса устройств управления движением отличающаяся тем, что введен блок микрофонов, выходы которого соединены со входами блока усилителей, выходы которых соединены с входами блока аналогово-цифровых преобразователей, соединенных с микроконтроллером, который соединен с входами нейронного процессора и блоком цифро-аналоговых преобразователей, выходы которых соединены с блоком динамиков, при этом дополнительно введен блок температурных датчиков, выходы которого соединены с входами нейронного процессора.
| US 20230234717 A1, 27.07.2023 | |||
| ПОДАВЛЕНИЕ ШУМОВ С ИСПОЛЬЗОВАНИЕМ СЕГМЕНТИРОВАННОГО, ЧАСТОТНО-ЗАВИСИМОГО ФАЗОВОГО ПОДАВЛЕНИЯ | 2018 |
|
RU2755511C2 |
| УСТРОЙСТВО ДЛЯ КАНТОВКИ РАСКАТА | 1965 |
|
SU214483A1 |
| СПОСОБ И СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДРОНОМ | 2018 |
|
RU2714977C1 |
| CN 108196566 A, 22.06.2018 | |||
| CA 2998207 A1, 23.03.2017. | |||

