1. Область техники
Изобретение относится к области авиационной техники и может быть использовано на летательных аппаратах (ЛА), группе ЛА для оценки их местоположения с гарантированной точностью по получаемой информации от бортовой однопозиционной пассивной станции для формирования целевой информации по наземным источникам радиоизлучения (ИРИ) и оценки их местоположения в интересах обеспечения применения авиационных средств поражения (АСП).
2. Уровень техники
На современных боевых летательных аппаратах источниками информации по ИРИ могут быть системы радиотехнической разведки (РТР), широкополосная пассивная головка самонаведения (ШПРГС) и комплекс средств связи ОСНОД (объединенная система связи, обмена данными, навигации и опознавания) обеспечивающих поступление и обработку информации от взаимодействующих ЛА, наземных пунктов управления, пунктов управления воздушного базирования.
Основным методом определения местоположения радиоизлучающей цели (РИЦ) по информации системы РТР или нескольких пеленгаторов, которыми могут быть в том числе взаимодействующие ЛА, является метод триангуляции (Мельников Ю. П. Радиотехническая разведка. Методы оценки эффективности местоопределения источников излучения. Радиотехника, 2008), заключающийся в последовательном или многопозиционном измерении азимутальных пеленгов ИРИ с последующим вычислением оценки координат (дальности) до точки их пересечения. Для одиночного ЛА обязательным условием является движение ЛА таким образом, чтобы пеленг на РИЦ изменялся во времени. Также при наличии измерения азимута и угла места местоположение определяется угломестным способом (Мельников Ю. П. Воздушная радиотехническая разведка (методы оценки эффективности), Радиотехника, 2005), заключающимся в определении координат/дальности до точки пересечения угломестного пеленга ИРИ с подстилающей поверхностью.
Основными недостатками приведенных способов является: независимая обработка информации от каждого источника, которая увеличивает вероятность размножения целей, обнаруженных разными системами, низкая достоверность информации о реальных целях, необходимость измерения двух углов для получения требуемой точности оценки координат и увеличенное время экстраполяции между замерами, т.к. отсутствует комплексирование замеров от нескольких источников информации.
Из уровня техники также известны следующие способы определения местоположения целей.
Способ определения координат источника радиоизлучения (патент
RU 2339966, опубл. 27.11.2008, МПК G01S 5/00), который заключается в приеме сигнала ИРИ узкобазовым многопозиционным пассивным локатором, с последующим восстановлением закономерности изменения фазы несущей частоты на интервале синтезирования, с последующим определением местоположения за время синтезирования.
Способ и устройство определения координат источника радиоизлучения (Патент RU 2419106, опубл. 20.05.2011, МПК G01S 13/46), представляющий собой метод повышения точности местоопределения ИРИ за счет более полного и объективного измерения положения антенной решетки измерителя в условиях воздействия возмущающих факторов (ветровая нагрузка, перегрузка при маневрах и др.)
Недостатком указанных изобретений является относительная низкая точность определения местоположения источника радиоизлучения (ИРИ) в связи с тем, что используется связка антенной системы и обработки сигнала ИРИ без учета пространственного положения носителя. Еще одним существенным недостатком приведенных способов является невозможность определения координат ИРИ с помощью одиночного однокоординатного (измеряется только один угол) измерителя, поскольку в представленных методах для определения местоположения ИРИ используются два угла (азимут и угол места).
Решаемая изобретением задача состоит в определении местоположения ИРИ с гарантированной точностью на основе анализа получаемой информации от системы радиотехнической разведки в виде однокоординатного пеленга на источник излучения в связанной системе координат (ССК).
Таким образом, техническим результатом предлагаемого изобретения является возможность устойчивого (по отношению к возмущениям в измерительном тракте), быстрого (по сравнению с традиционными триангуляционными методами) определения местоположения/дальности до ИРИ по информации однокоординатного пеленгатора (системы РТР), с формированием оценки гарантированной точности определения дальности.
3. Сущность изобретения.
Под оценкой гарантированной точности понимается максимальная норма геометрических размеров области допустимых оценок координат (дальности) РИЦ, с учетом воздействия на измерительные тракты пассивных радиотехнических систем всей возможной совокупностью возмущающих воздействий (как высокочастотных шумовых, так и низкочастотных немоделируемых возмущений, частично пересекающихся с полезным сигналом в частотной области) в произвольных сочетаниях.
Предлагаемый способ включает в себя следующие существенные признаки:
- завязка трассы по первому замеру для последующей обработки;
- оценку гарантированной точности определения дальности, что отсутствует в других известных способах;
- решение задачи оценивания вплоть до дальности радиогоризонта, с учетом превышения ЛА над поверхностью геоида;
- минимизацию времени определения местоположения ИРИ за счет использования оценки гарантированной точности;
- отождествление измерений по ИРИ в одну трассу;
- формирование БД ИРИ;
- наличие универсального интерфейса выходных данных;
- масштабирование на задачи многопозиционной пеленгации.
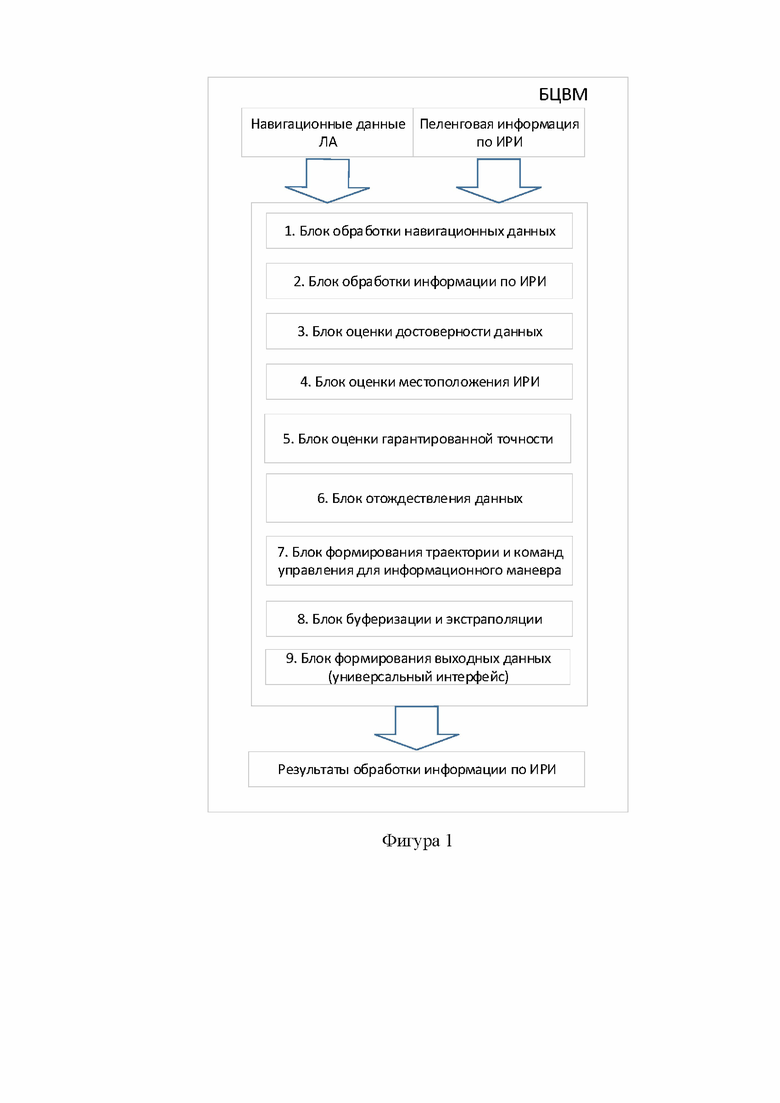
Способ реализуется в бортовой центральной вычислительной машине (БЦВМ) и включает в себя следующие блоки:
1. Блок обработки навигационных данных.
2. Блок обработки информации по ИРИ.
3. Блок оценки достоверности данных.
4. Блок оценки местоположения ИРИ.
5. Блок оценки гарантированной точности.
6. Блок отождествления данных по ИРИ.
7. Блок формирования траектории и команд управления для информационного маневра.
8. Блок буферизации и экстраполяции.
9. Блок формирования выходных данных (универсальный интерфейс).
Техническая задача решается, а технический результат достигается настоящим изобретением за счет того, что при поступлении навигационной информации по летательному аппарату и информации об источнике радиоизлучения (ИРИ) от однокоординатной системы радиотехнической разведки в блок обработки информации по ИРИ (2), и в блок обработки навигационных данных (1), выполняется преобразование полученных пеленгационных измерений из ССК в НПСК (нормальная подвижная система координат) носителя, с расчетом азимутального пеленга в плоскости местного горизонта, для устранения неоднозначности измерений однокоординатного пеленгатора, измеряющего бортовой пеленг в ССК.
Затем осуществляется обработка преобразованных данных в блоке оценки местоположения ИРИ (4), блоке оценки гарантированной точности (5), блоке отождествления данных по ИРИ (6), где при получении нового замера производится ассоциация этого замера с существующими трассами, при этом возможны два случая: 1- произошла ассоциация замера с существующей трассой, далее по этому замеру выполняются дальнейшие вычисления, 2- нет ассоциации замера с существующими трассами, тогда по этому замеру выполняется формирование новой трассы.
Для определения дальности и азимута ИРИ применяется нелинейный кинематический азимутально-дальностный фильтр калмановской структуры, обеспечивающий высокую устойчивость процесса оценивания по отношению к высокочастотным возмущениям в измерительном канале.
Для обеспечения устойчивости процесса определения дальности до ИРИ по отношению к функциональным (немоделируемым) возмущениям в измерительном тракте вводится оценка гарантированной точности определения дальности. Для формирования оценки гарантированной точности определения дальности используется аппроксимация выпуклой оболочки информационного множества допустимых оценок дальности до ИРИ - D, сформированная в процессе оценивания местоположения ИРИ. Тогда центр шара  наименьшего возможного радиуса, содержащего множество D, представляет собой чебышевский центр этого множества и является оценкой дальности, тогда чебышевский радиус
наименьшего возможного радиуса, содержащего множество D, представляет собой чебышевский центр этого множества и является оценкой дальности, тогда чебышевский радиус  множества D определяет гарантированную точность данной оценки:
множества D определяет гарантированную точность данной оценки:

где:
B - нормированное векторное пространство;
 - оценка дальности, принадлежащая информационному множеству допустимых оценок D;
- оценка дальности, принадлежащая информационному множеству допустимых оценок D;
 - произвольная оценка дальности, принадлежащая нормированному векторному пространству B;
- произвольная оценка дальности, принадлежащая нормированному векторному пространству B;
 - операторы взятия (определения) верхней/нижней граней множества.
- операторы взятия (определения) верхней/нижней граней множества.
С учетом единичной размерности рассматриваемой задачи, чебышевский шар представляет собой отрезок  , чебышевский центр множества D совпадает с серединой данного отрезка, а чебышевский радиус равен половине длины вышеуказанного отрезка, где
, чебышевский центр множества D совпадает с серединой данного отрезка, а чебышевский радиус равен половине длины вышеуказанного отрезка, где  - нижняя, а
- нижняя, а  - соответственно, верхняя допустимые оценки дальности.
- соответственно, верхняя допустимые оценки дальности.
Используя обозначения и для обозначения верхней и нижней граней множества возможных оценок дальности, получим:
где  - чебышевский центр множества (минимаксная оценка дальности), а
- чебышевский центр множества (минимаксная оценка дальности), а  - чебышевский радиус множества, т.е. оценка гарантированной точности.
- чебышевский радиус множества, т.е. оценка гарантированной точности.
Если информационное множество задачи определения дальности оказывается замкнутым (т.е. набрана минимальная азимутальная база), производится определение чебышевского радиуса информационного множества, величина которого по определению является оценкой гарантированной точности определения дальности до ИРИ.
При достижении заданного порога точности оценки местоположения ИРИ, информация записывается в блок буферизации и экстраполяции (8), при этом информация обновляется при каждом поступлении новых данных по ИРИ, и одновременно осуществляется оценка необходимости выполнения информационного маневра в блоке формирования траектории и команд управления для информационного маневра (7).
При наличии необходимости (недостаточной динамике азимутального пеленга ИРИ, малом значении бортового пеленга ИРИ и не достигнутой требуемой точности оценки координат ИРИ) в блоке формирования траектории и команд управления для информационного маневра (7) формируется рациональная траектория полета, обеспечивающая реализацию вышесказанных критериев в части динамики пеленга ИРИ, а также соответствующие ей заданные параметры управления (заданная перегрузка, крен заданный и т.д.). В качестве базовой траектории движения ЛА используется траектория типа «логарифмическая спираль», когда бортовой пеленг ИРИ (угол между проекциями оси X’ ССКН и вектора, соединяющего начало ССКН с РИЦ, на плоскость XZ ССКН) поддерживается равным некоторому заранее заданному значению курсового угла (ΔΨзад). Решение задачи оценивания выполняется вплоть до дальности радиогоризонта, с учетом превышения ЛА над поверхностью геоида.
В случае отсутствия информационного контакта с ИРИ, информация по последним данным по ИРИ из блоков оценки местоположения ИРИ (4), оценки гарантированной точности (5), отождествления данных по ИРИ (6) записывается в блок буферизации и экстраполяции (8), где выполняется экстраполяция параметров ИРИ на время отсутствия информации по ИРИ, а при возобновлении информационного контакта данные по ИРИ обновляются.
На последнем этапе вся обработанная информация поступает в блок формирования выходных данных (9), который формирует выходной формуляр по ИРИ (координаты местоположения ИРИ, ошибки по определению координат, радиотехнические параметры, идентификационные признаки, признаки отождествления и другие данные) и выдает данные по ИРИ потребителю, используя универсальный интерфейс.
Таким образом, заявленное изобретение обеспечивает возможность повышения точности и скорости оценки местоположения ИРИ с заданной гарантированной точностью, а также сокращение времени формирования данной оценки только по информации однокоординатной системы РТР.
Способ может использоваться для обеспечения задач радиотехнической разведки, применения авиационных средств поражения с ШПРГС. Задача выполняется на фоне каждого этапа полета, при наличии информации по ИРИ ведется обработка параметрической информации об ИРИ от РТР.
Предлагаемый способ обеспечивает формирование набора параметров сопровождаемого объекта (цели) по имеющейся на борту самолета информации, характеризующих его местоположение, ошибки по определению координат, радиотехнические параметры, идентификационные признаки, признаки отождествления и другие данные.
4. Перечень фигур.
Заявленное изобретение поясняется чертежами.
На фигуре 1 представлена схема приема и обработки информации по ИРИ для формирования трасс ИРИ и оценки их местоположения.
Представленными на фигуре позициями обозначены следующие блоки предлагаемого способа определения местоположения неподвижных источников радиоизлучения при однокоординатной пеленгации в связанной системе координат летательного аппарата:
1. Блок обработки навигационных данных.
2. Блок обработки информации по ИРИ.
3. Блок оценки достоверности данных.
4. Блок оценки местоположения ИРИ.
5. Блок оценки гарантированной точности.
6. Блок отождествления данных по ИРИ.
7. Блок формирования траектории и команд управления для информационного маневра.
8. Блок буферизации и экстраполяции.
9. Блок формирования выходных данных (универсальный интерфейс).
5. Осуществление изобретения
Предлагаемый способ определения местоположения неподвижных источников радиоизлучения при однокоординатной пеленгации в связанной системе координат летательного аппарата реализуется в бортовой центральной вычислительной машине и может использоваться на различных летательных аппаратах, например, на самолетах, беспилотных летательных аппаратах (БПЛА), вертолетах и т.д.
Все технические средства, обеспечивающие работу, применение которых предусмотрено изобретением, разрабатываются и выпускаются отечественными промышленными предприятиями.
Предусмотренное способом взаимодействие средств реализуется в известных интерфейсах, используемых в авиастроении.
Предлагаемый способ проверен и подтвердил эффективность при проведении стендовых и летных испытаниях.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ТРАССИРОВАНИЯ НАЗЕМНЫХ И МОРСКИХ РАДИОИЗЛУЧАЮЩИХ ЦЕЛЕЙ | 2023 |
|
RU2807613C1 |
| СПОСОБ ПОЛУЧЕНИЯ РАДИОТЕХНИЧЕСКОЙ ИНФОРМАЦИИ И РАДИОТЕХНИЧЕСКИЙ КОМПЛЕКС ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2562616C1 |
| СПОСОБ БОНДАРЕНКО А.В. ПОЛУЧЕНИЯ РАДИОТЕХНИЧЕСКОЙ ИНФОРМАЦИИ И РАДИОТЕХНИЧЕСКИЙ КОМПЛЕКС ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2599259C1 |
| АДАПТИВНЫЙ СПОСОБ ПРОСТРАНСТВЕННОГО ОТОЖДЕСТВЛЕНИЯ ПЕЛЕНГОВ С НАЗЕМНЫМИ ИСТОЧНИКАМИ РАДИОИЗЛУЧЕНИЯ И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2018 |
|
RU2686481C1 |
| Способ определения координат источников радиосигналов с взаимно перекрывающимися спектрами | 2024 |
|
RU2834966C1 |
| Способ пространственного отождествления пеленгов с наземными источниками радиоизлучения | 2020 |
|
RU2731682C1 |
| Способ определения координат источника радиоизлучений с борта летательного аппарата по двум азимутальным пеленгам | 2016 |
|
RU2638177C1 |
| Способ определения координат радиоизлучающего объекта в рабочей зоне многопозиционного пассивного радиотехнического комплекса и устройство для его осуществления | 2020 |
|
RU2757197C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ И ПАРАМЕТРОВ ДВИЖЕНИЯ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЙ ПО ИЗМЕРЕНИЯМ ИХ НЕСУЩЕЙ ЧАСТОТЫ | 2021 |
|
RU2776078C1 |
| СПОСОБ ТРАССОВОГО СОПРОВОЖДЕНИЯ ВОЗДУШНЫХ МАНЕВРИРУЮЩИХ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЯ ПО ПЕЛЕНГОВОЙ ИНФОРМАЦИИ ОТ ОДНОПОЗИЦИОННОЙ СИСТЕМЫ РАДИОТЕХНИЧЕСКОЙ РАЗВЕДКИ ВОЗДУШНОГО БАЗИРОВАНИЯ | 2017 |
|
RU2660498C1 |
Изобретение относится к области авиационной техники и может быть использовано на летательных аппаратах (ЛА), группе ЛА для оценки их местоположения с гарантированной точностью по получаемой информации от бортовой однопозиционной пассивной станции для формирования целевой информации по наземным ИРИ и оценки их местоположения в интересах обеспечения применения авиационных средств поражения (АСП). Техническим результатом изобретения является возможность устойчивого и быстрого определения местоположения/дальности до ИРИ по информации однокоординатного пеленгатора с формированием оценки гарантированной точности определения дальности. Заявленный способ направлен на определение местоположения неподвижных источников радиоизлучения с оцениванием гарантированной точности при однокоординатной пеленгации ИРИ в связанной системе координат летательного аппарата. Способ реализуется в бортовой центральной вычислительной машине (БЦВМ). БЦВМ включает в себя следующие блоки: блок обработки навигационных данных (1); блок обработки информации по ИРИ (2); блок оценки достоверности данных (3); блок оценки местоположения ИРИ (4); блок оценки гарантированной точности (5); блок отождествления данных по ИРИ (6); блок формирования траектории и команд управления для информационного маневра (7); блок буферизации и экстраполяции (8); блок формирования выходных данных (универсальный интерфейс) (9). 2 з.п. ф-лы, 1 ил.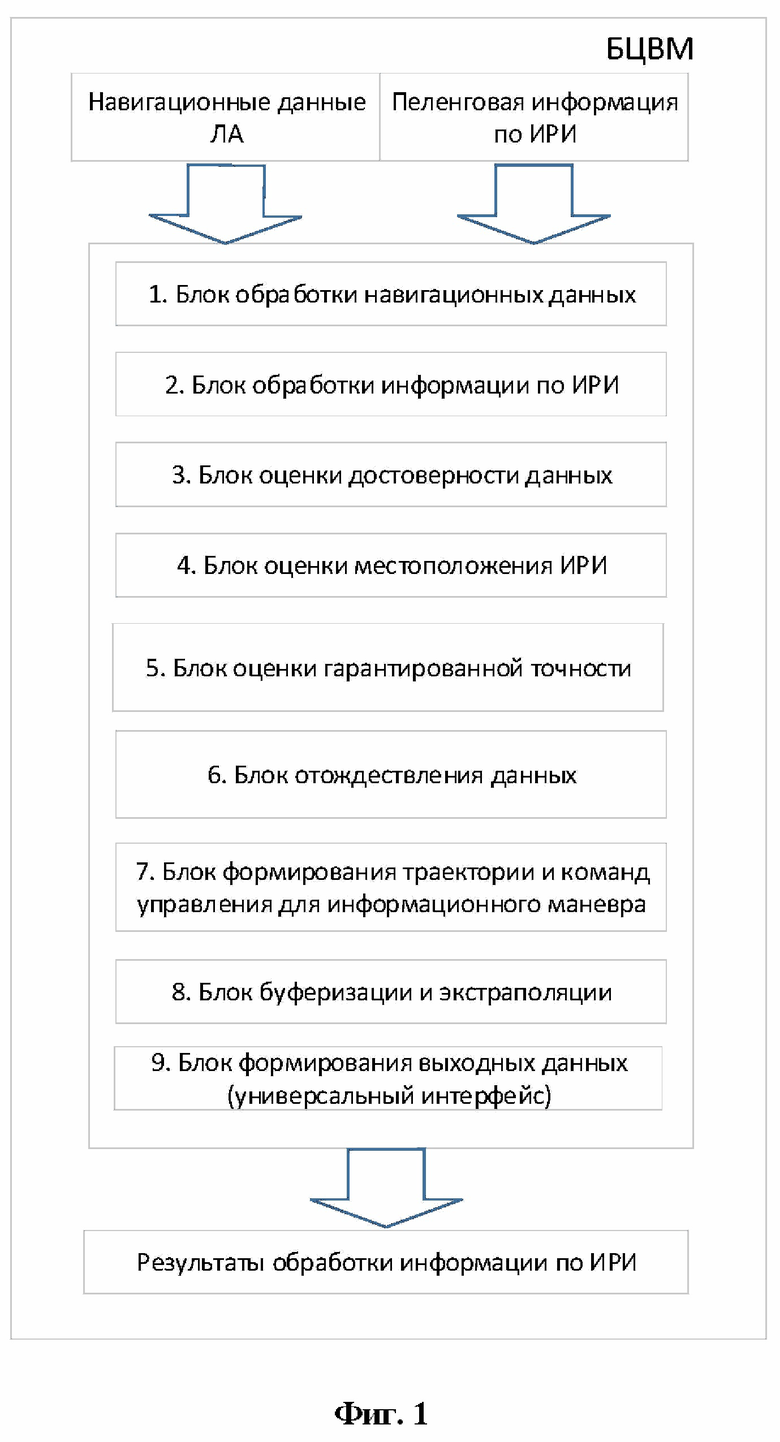
1. Способ определения местоположения неподвижных источников радиоизлучения при однокоординатной пеленгации в связанной системе координат летательного аппарата, реализуемый в бортовой центральной вычислительной машине, отличающийся тем, что при поступлении навигационной информации по летательному аппарату и информации об источнике радиоизлучения (ИРИ) от однокоординатной системы радиотехнической разведки в блок обработки информации по ИРИ (2) и в блок обработки навигационных данных (1) выполняется преобразование полученной информации для проверки на достоверность в блоке оценки достоверности данных (3), после чего осуществляется последующая обработка преобразованных данных в блоке оценки местоположения ИРИ (4), блоке оценки гарантированной точности (5), блоке отождествления данных по ИРИ (6), в которых выполняется формирование новой трассы или привязка измерения к той или иной существующей трассе, фильтрация измерений с оценкой местоположения ИРИ, оценка гарантированной точности определения дальности, а при достижении заданного порога точности оценки местоположения ИРИ информация записывается в блок буферизации и экстраполяции (8), при этом информация обновляется при каждом поступлении новых данных по ИРИ, и одновременно осуществляется оценка необходимости выполнения информационного маневра в блоке формирования траектории и команд управления для информационного маневра (7), после чего вся обработанная информация поступает в блок формирования выходных данных (9), который формирует выходной формуляр по ИРИ и выдает данные по ИРИ потребителю, используя универсальный интерфейс.
2. Способ по п. 1, отличающийся тем, что при наличии необходимости в блоке формирования траектории и команд управления для информационного маневра (7) формируется оптимальная траектория полета и требуемые команды управления ЛА.
3. Способ по п. 1, отличающийся тем, что в случае отсутствия информационного контакта с ИРИ информация по последним данным по ИРИ из блоков оценки местоположения ИРИ (4), оценки гарантированной точности (5), отождествления данных по ИРИ (6) записывается в блок буферизации и экстраполяции (8), где выполняется экстраполяция параметров ИРИ на время отсутствия информации по ИРИ, а при возобновлении информационного контакта данные по ИРИ обновляются.
| Способ определения дальности до неподвижного источника излучения движущимся пеленгатором | 2016 |
|
RU2617447C1 |
| СПОСОБ ТРАССИРОВАНИЯ НАЗЕМНЫХ И МОРСКИХ РАДИОИЗЛУЧАЮЩИХ ЦЕЛЕЙ | 2023 |
|
RU2807613C1 |
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2009 |
|
RU2419106C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2007 |
|
RU2339966C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ИСТОЧНИКА ИМПУЛЬСНЫХ РАДИОСИГНАЛОВ | 2018 |
|
RU2695321C1 |
| Способ обнаружения и азимутального пеленгования наземных источников радиоизлучения с летно-подъемного средства | 2020 |
|
RU2732505C1 |
| ГАЛИЙ В.А., ИВАНИЩЕВ С.Н., БУКРИЙ В.Н | |||
| Определение гарантированной дальности обнаружения низколетящих целей радиолокационными станциями обнаружения надводного корабля // Вопросы | |||

