Группа изобретений относится к области управления системами слежения за подвижными объектами, в том числе с качающегося основания.
Известен способ слежения за объектом (патент РФ №2211473 от 05.11.2001 G05D 3/12 [1], (прототип)), производящий дискретный прием измеренных координат объекта слежения от источника видеосигнала в измерительной системе координат (пеленгатор), перевод полученных сигналов ошибок слежения для каждого источника видеосигнала в стабилизированную систему координат (преобразователь из инструментальной в стабилизированную систему координат ПКИнС), расчет выходных сигналов управления слежением (корректирующее устройство), преобразование выходных сигналов управления в измерительную систему координат (преобразователь из стабилизированной в инструментальную систему координат ПКСИн), дискретный прием измеренных ошибок стабилизации в измерительной системе координат (гироскопический датчик угла), вычисление по ошибкам стабилизации коррекции положения поля измерения в исполнительной системе координат (блок наведения и стабилизации).
Указанный способ имеет низкую точность сопровождения и стабилизации линии визирования цели, поскольку не учитывает динамику движения цели.
Известна система слежения за объектом (патент РФ №2211473 от 05.11.2001 G05D 3/12 [1], (прототип)), включающая последовательно соединенные пеленгатор (оптико-электронный пеленгатор), преобразователь из инструментальной в стабилизированную систему координат ПКИнС, коммутатор, корректирующее устройство КУ и преобразователь из инструментальной в исполнительную систему координат ПКИнИ (эти блоки ПКИнС, КУ и ПКИнИ совместно с преобразователем из инструментальной в исполнительную систему координат ПКИнИ реализуются вычислительной системой), блок наведения и стабилизации БНС (привод слежения), механически связанный с пеленгатором (оптико-электронным пеленгатором) и гироскопическим датчиком ГДУ, выход которого соединен с преобразователем из инструментальной в исполнительную систему координат ПКИнИс (со вторым входом вычислительной системы), а вход с выходом преобразователя из стабилизированной в инструментальную систему координат ПКСИн (с первым выходом вычислительной системы).
Указанная система имеет низкую точность сопровождения, так как при сопровождении скоростных маневренных объектов исполнительный привод не успевает отработать сигнал управления, что приводит к увеличению ошибки сопровождения.
Известен способ компенсации движения объекта (патент РФ №2211473 от 05.11.2001 G05D 3/12 [1], (прототип)), обеспечивающий дискретный прием измеренных ошибок стабилизации в нестабилизированной системе координат, вычисление по измеренным ошибкам коррекции положения поля измерения в исполнительной системе координат.
Указанный способ имеет недостаточную точность компенсации, так как при решении задачи компенсации коррекция положения центра поля зрения осуществляется только по величине измеренных ошибок, что не обеспечивает точного слежения.
Задача предлагаемого технического решения заключается в повышении точности сопровождения оптико-электронной системы при выполнении задач сопровождения скоростных маневренных объектов в движении.
Решение указанной задачи достигается за счет того, что в известном способе слежения за объектом, включающем дискретный прием измеренных координат объекта слежения в измерительной системе координат, представляющих собой сигналы ошибок слежения, перевод полученных сигналов ошибок слежения в стабилизированную систему координат, расчет выходных сигналов управления слежением по сигналам ошибок слежения в стабилизированной системе координат, преобразование выходных сигналов управления в измерительную систему координат, дискретный прием измеренных сигналов ошибок поля зрения относительно его центральной оси в измерительной системе координат и преобразование их в исполнительную систему координат, вычисление по этим сигналам ошибок стабилизации сигналов коррекции положения центра поля зрения в исполнительной системе координат, после расчета сигналов коррекции положения центра поля зрения в исполнительной системе координат осуществляют процесс компенсации движения объекта, далее вычисляются выходные команды изменения положения центра поля зрения в исполнительной системе координат в соответствии с сигналами коррекции положения центра поля зрения и с учетом компенсации движения объекта.
По способу слежения за объектом расчет выходных сигналов управления слежением по сигналам ошибки слежения в стабилизированной системе координат осуществляется пропорционально скорости движения объекта.
Решение указанной задачи достигается за счет того, что в известную систему слежения за объектом, включающую последовательно соединенные оптико-электронный пеленгатор, вычислительную систему, привод слежения, выход которого соединен со входами с оптико-электронного пеленгатора и гироскопического датчика угла, выход которого соединен со вторым входом вычислительной системы, а второй вход с первым выходом вычислительной системы, новым является то, что что в систему введен датчик измерения угловых координат привода слежения, обеспечивающий измерение координат центра поля зрения в исполнительной системе координат, вход которого соединен с выходом привода слежения, а выход соединен с третьим входом вычислительной системы, также вычислительная система, обеспечивающая компенсацию движения объекта по измеренным в исполнительной системе координат центра поля зрения и формирующая команды компенсации к сигналам управления приводом слежения, включает последовательно соединенные первый и второй вычислители, при этом, первый вход вычислительной системы является первым входом первого вычислителя, второй вход которого является вторым входом вычислительной системы, первый выход которой является вторым выходом первого вычислителя, третий вход вычислительной системы является вторым входом второго вычислителя, а первый выход которого является вторым выходом вычислительной системы.
В системе слежения за объектом параллельно датчику измерения угловых координат привода слежения подсоединен еще один датчик измерения угловых координат привода слежения.
Решение указанной задачи достигается за счет того, что в известном способе компенсации движения объекта, включающем дискретный прием измеренных ошибок управления, представляющих разницу между необходимым и истинным положением центра поля управления, в измерительной системе координат и преобразование их в исполнительную систему координат, вычисление по измеренным ошибкам сигналов коррекции положения центра поля зрения в исполнительной системе координат, в дискретные моменты времени после расчета сигналов коррекции положения центра поля зрения принимаются измеренные координаты центра поля зрения в исполнительной системе координат, вычисляются по измеренным координатам сигналы компенсации движения объекта с учетом обратной модели динамики изменения положения центра поля зрения, вычисляются выходные команды изменения положения центра поля зрения в исполнительной системе координат пропорционально сигналам коррекции положения центра поля зрения и сигналам компенсации движения объекта.
Технический результат заключается в повышении точности оптико-электронной системы в движении при выполнении задач сопровождения скоростных маневренных объектов за счет учета параметров движения цели, используя данные с датчика определения угловых скоростей привода слежения оптико-электронной системы и внедрения алгоритмов компенсирующих связей.
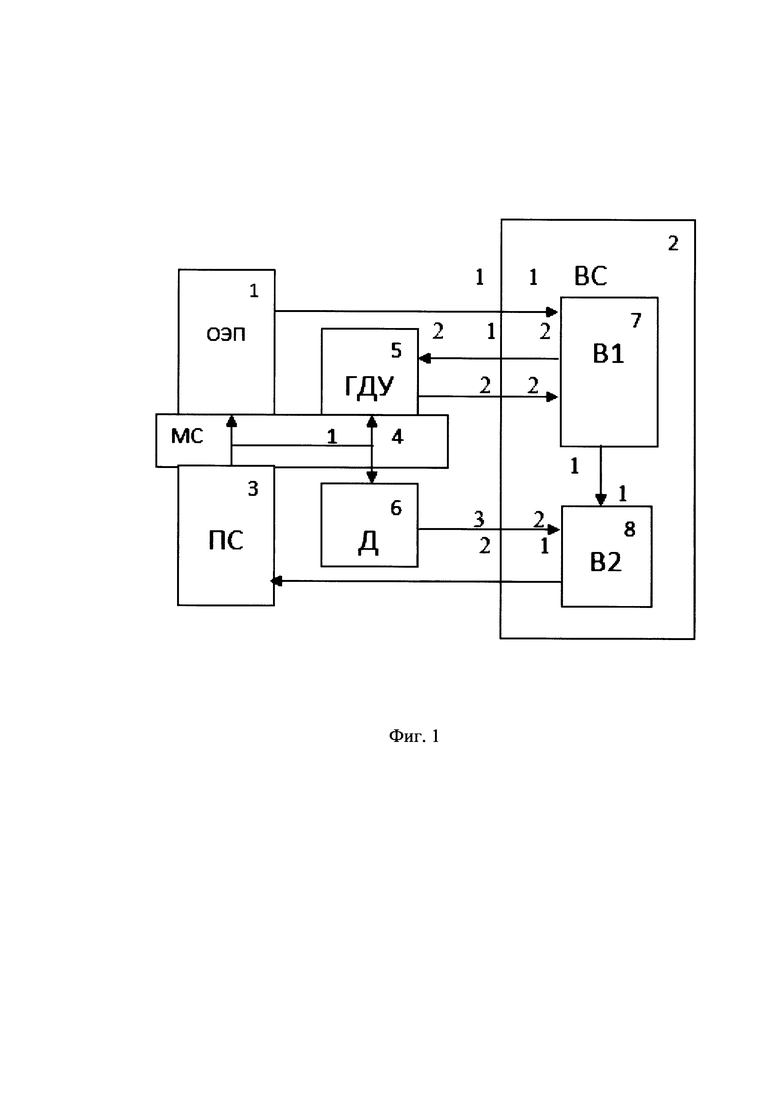
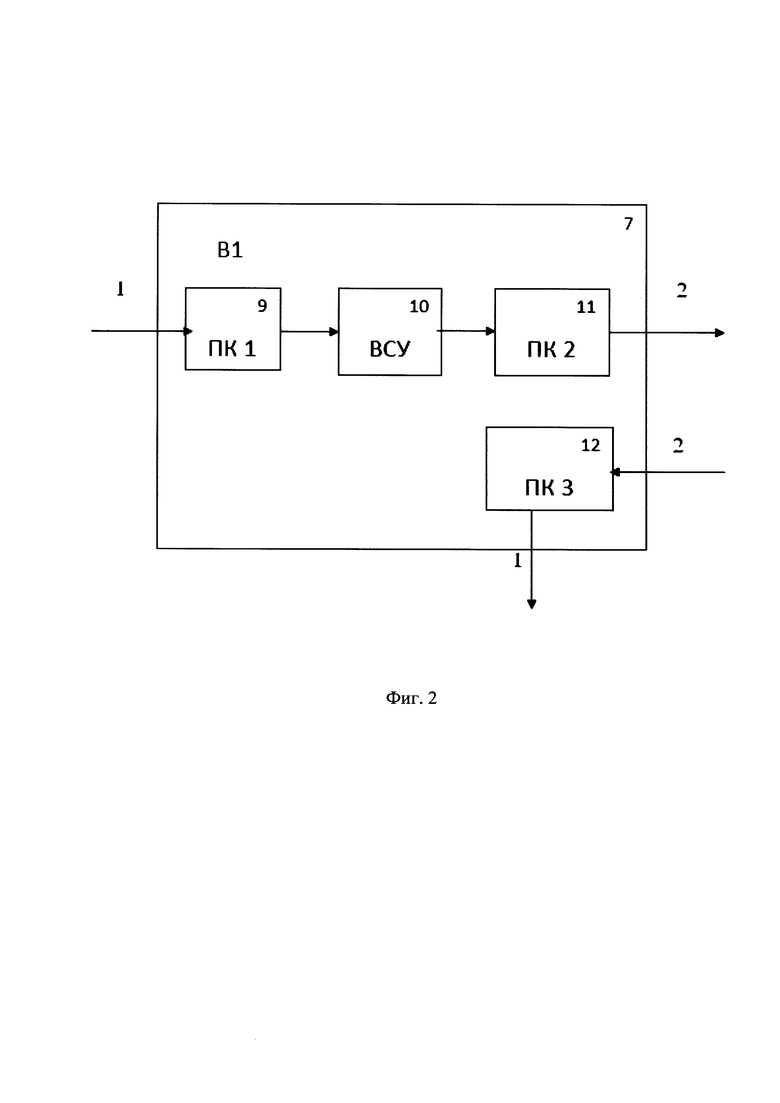
Предлагаемое техническое решение поясняется фигурами 1, 2, где Фиг. 1 изображает реализацию система слежения за объектом (для одной плоскости сопровождения), Фиг. 2 изображает выполняемые вычисления в первом вычислителе.
На фиг. 1 обозначены: 1 - оптико-электронный пеленгатор (ОЭП), 2 - вычислительная система (ВС), 3 - привод слежения (ПС), 4 - механическая связь (МС), 5 - гироскопический датчик угла (ГДУ), 6 - датчик измерения угловых скоростей (Д), 7 - первый вычислитель (В1), 8 - второй вычислитель (В2).
На фиг. 2 обозначены: 9 - преобразование из измерительной в стабилизированную систему координат (ПК1); 10 - вычисление сигналов управлениям (ВСУ), реализующее функции нелинейного корректирующего устройства (НКУ); 11 - преобразование из стабилизированной в измерительную систему координат (ПК2); 12 - преобразование из измерительной в исполнительную систему координат (ПКЗ).
Все использованные блоки и устройства являются известными или могут быть выполнены из известных блоков, соединенных известным образом.
ОЭП 1 может быть выполнен как в [2]. ГДУ 5 может быть сделан, как это изложено в [3], стр. 401-407. ВС 1 и ВС 2 могут быть выполнены как в [5]. ПС 3 может быть выполнен как в [6]. Д 6 может быть сделан как датчик угловой скорости ДУС (БИУС - блок измерения угловой скорости) в [7], стр. 293-297 и акселерометр (БИУУ - блок измерения углового ускорения) [7], стр. 293-297.
Способ слежения за объектом основан на формировании в ОЭП 1 координат объекта слежения в измерительной системе координат с последующим пересчетом в стабилизированную систему координат для исключения из сигнала составляющей от качки и уменьшения перекрестных связей между каналами. Вычисления скорости слежения, которая пересчитывается из стабилизированной системы координат в измерительную для формирования скорости управления. Вычисление ошибок стабилизации в измерительной системе. Вычисление по ошибкам стабилизации коррекции положения поля зрения (измерения) в исполнительной системе координат. В процессе стабилизации вычисляются в дискретные моменты времени координаты центра поля измерения в исполнительной системе координат. По измеренным координатам центра поля измерения вычисляется компенсация, учитывающая движение объекта, вычисляется изменение положения поля измерения в исполнительной системе координат в соответствие с коррекцией и учетом компенсирующей связи.
При слежении за объектом расчет выходных сигналов управления слежением по сигналам ошибки слежения в стабилизированной системе координат осуществляется пропорционально скорости движения объекта.
Система слежения за объектом работает следующим образом. ОЭП 1 преобразует оптический сигнал в электрический и измеряет угловые координаты объекта слежения в измерительную систему координат, которые передаются на первый вход В1 7, являющегося первым входом ВС 2, где для исключения из сигнала составляющей от качки и уменьшения перекрестных связей между каналами, сигнал с выхода ОЭП 1 пересчитывают в ПК1 9 в стабилизированную систему координат. После преобразования вычисленное значение координат в стабилизированной системе поступает на вход ВСУ (НКУ) 10. Для формирования сигнала управления скоростью прецессии ГДУ 5 вычисленная скорость слежения пересчитывается в ПК2 11 из стабилизированной системы координат в измерительную и передается на вход ГДУ 5 со второго выхода В1 7, являющегося первым выходом ВС 2. Сигнал с выхода ГДУ 5 поступает на второй вход В2 8, являющимся вторым входом ВС 7, где преобразуется в исполнительную систему координат с помощью ПКЗ 12 и поступает с первого выхода В2 7 на первый вход В2 8. Для уменьшения ошибки стабилизации ПС 3, в процессе стабилизации измеряются посредством датчика Д 6 в дискретные моменты времени координаты центра поля измерения в исполнительной системе координат и передаются на второй вход В2 8, являющимся третьим входом ВС 2, где вычисляется по измеренным координатам центра поля измерения компенсация движения объекта. При назначении команды компенсации к сигналам управления ПС 3 добавляются показания Д 6, измеряющего угловые координаты МС 4 с ПС 3. В Td2 8 вычисляются сигналы управления ПС 3 и передаются с выхода В2 8, являющегося вторым выходом ВС 2, на вход ПС 3. Под действием этого сигнала ПС 3 стремится совместить положение платформы с расположенными на ней приемным устройством пеленгатора и ГДУ 5 с положением линии визирования на объект.
В системе слежения за объектом параллельно датчику измерения угловых координат 6 (угловой скорости) привода слежения подсоединен еще один датчик измерения угловых координат привода слежения (углового ускорения).
Способ компенсации движения объекта основан на дискретном приеме измеренных ошибок стабилизации (управления) в измерительной системе координат. Вычисление по измеренным ошибкам коррекции положения поля измерения в измерительной системе координат, с последующим переводом в исполнительную систему координат. В процессе стабилизации в дискретные моменты времени измеряются координаты центра поля измерения в исполнительной системе координат, по измеренным координатам вычисляется компенсация движения объекта с учетом обратной модели динамики изменения положения поля измерения и вычисляется в исполнительной системе координат коррекция положения поля измерения с учетом полученной компенсации. В качестве координат поля измерения может использоваться угловая скорость либо угловая скорость и ускорение изменения его положения.
Обосновать работу предложенных технических решений можно следующим образом.
Источник излучения создает материальный носитель полезной информации - поток излучения. ОЭП 1 преобразует оптический сигнал в электрический и измеряет угловые координаты объекта слежения в измерительную систему координат, которые передаются на первый вход В1, являющегося первым входом ВС 2, где для исключения из сигнала составляющей от качки и уменьшения перекрестных связей между каналами, сигнал с выхода ОЭП 1 пересчитывают в ПК1 9 в стабилизированную систему координат, по зависимостям (1):

где 
 - сигналы рассогласования в измерительной системе координат;
- сигналы рассогласования в измерительной системе координат;

 - сигналы рассогласования в стабилизированной системе координат;
- сигналы рассогласования в стабилизированной системе координат;
 - координата вертикального канала привода слежения;
- координата вертикального канала привода слежения;
γ* - угол скрутки в измерительной системе координат.
После преобразования вычисленное значение координат в стабилизированной системе поступает на вход ВСУ (НКУ) 10, где проводятся такие операции над ним, чтобы, обеспечивая устойчивость системы, добиться требуемых параметров по точности и характеристикам переходных процессов [4], являющийся скоростью слежения.
Для формирования сигнала управления скоростью прецессии ГДУ 5 вычисленная скорость слежения пересчитывается в ПК2 11 из стабилизированной системы координат в измерительную по формулам (2) и передается на вход ГДУ 5 со второго выхода В1 7, являющегося первым выходом ВС 2:

где  - сигналы управления прецессией в измерительной системе координат [1];
- сигналы управления прецессией в измерительной системе координат [1];
 - сигналы управления прецессией в стабилизированной системе координат.
- сигналы управления прецессией в стабилизированной системе координат.
ГДУ 5, расположенный на той же платформе, что и приемное устройство пеленгатора, передает значение ошибки управления ПС 3 с выхода ГДУ 5 на второй вход ВС 2, являющимся вторым входом В1 7.
Пересчет координат управления ПС 3 в режиме управления от ГДУ 5 из измерительной системы координат в исполнительную вычисляется в ПК 3 по формулам (3) и поступает со второго выхода В1 7 на первый вход В2 8:

где  - ошибки стабилизации ПС 3 в исполнительной системе координат [1];
- ошибки стабилизации ПС 3 в исполнительной системе координат [1];
 - ошибки стабилизации ГДУ 5 в измерительной системе координат;
- ошибки стабилизации ГДУ 5 в измерительной системе координат;
 - угол места платформы в исполнительной системе координат.
- угол места платформы в исполнительной системе координат.
Для уменьшения ошибки стабилизации ПС 3, в процессе стабилизации измеряются посредством Д 6 в дискретные моменты времени координаты поля измерения в исполнительной системе координат и передаются в В2 8, где вычисляется по измеренным координатам компенсация  учитывающая движение объекта и изменение положения поля измерения в исполнительной системе координат в соответствии с коррекцией и с учетом компенсирующей связи. При назначении команды компенсации к сигналам управления ПС 3
учитывающая движение объекта и изменение положения поля измерения в исполнительной системе координат в соответствии с коррекцией и с учетом компенсирующей связи. При назначении команды компенсации к сигналам управления ПС 3  добавляются показания Д 6, измеряющего угловые координаты МС 4 с ПС 3.
добавляются показания Д 6, измеряющего угловые координаты МС 4 с ПС 3.
Сигналы управления ПС 3 вычисляются в В2 8 по формулам (4) и передаются с выхода В2 8, являющегося вторым выходом ВС 2, на вход ПС 3:
где  - сигналы управления привода слежения из В1 7,
- сигналы управления привода слежения из В1 7,
поступающие на вход В2 8;
 - сигналы компенсации, поступающие с выхода Д 6 на третий вход ВС 2, являющегося третьим входом В1 7.
- сигналы компенсации, поступающие с выхода Д 6 на третий вход ВС 2, являющегося третьим входом В1 7.
Сигналы компенсации движения объекта вычисляются с учетом обратной модели динамики изменения положения центра поля зрения. При этом может быть использована либо угловая скорость с датчика 6 либо угловые скорости и ускорение с двух параллельных датчиков 6. Передаточная функция выходного сигнала ϕвых(t) на выходе ПС 3 через параметры системы управления и входное воздействие ϕвх(t) со второго выхода В2 8 в этом случае будет иметь следующий вид:

где Wi - передаточные функции (индекс соответствует номеру устройства);
 - передаточная функция алгоритма коррекции положения центра поля зрения, реализованного в В2 8;
- передаточная функция алгоритма коррекции положения центра поля зрения, реализованного в В2 8;  передаточная функция обратной модели динамики изменения положения центра поля зрения, реализованной в В2 8. При выполнении условия
передаточная функция обратной модели динамики изменения положения центра поля зрения, реализованной в В2 8. При выполнении условия

выражение (8) примет вид:
Следовательно, в этом случае обеспечивается эффективное инвариантное слежение за маневрирующим объектом.
Из анализа этой формулы (5) видно, что введение компенсирующего сигнала по угловой скорости или угловой скорости и ускорения с датчиков 6 с учетом обратной модели динамики изменения положения центра поля зрения позволяют повысить точность слежения за маневренным объектом в движении.
Под действием этого сигнала ПС 3 стремится совместить положение платформы с расположенными на ней приемным устройством пеленгатора и ГДУ 5 с положением линии визирования на объект. Таким образом в движении осуществляется слежение за подвижным объектом.
Установлено экспериментально, что (5) справедливо, если для отношения коэффициентов передачи элементов систему управления в полосе рабочих частот выполняется зависимость:

Значения коэффициентов из диапазона 0,7…1,3 в (6) определяются при настройке каждого конкретного образца системы с целью наиболее полной реализации условия (5). Это обстоятельство вызвано отличием параметров конкретного образца системы от номинала.
Следовательно, использование новых элементов 6…12, соединенных в соответствии с Фиг. 1 и 2 с указанными характеристиками (1)…(6) в предлагаемых способах и системе управления выгодно отличает предлагаемые технические решения от прототипов, так как обеспечивают повышение точности сопровождения оптико-электронной системы скоростных маневренных объектов в движении.
Описанные выше технические решения позволяют повысить точность оптико-электронной системы при выполнении задач сопровождения скоростных маневренных объектов в движении за счет учета динамики движения объекта, внедрения алгоритмов стабилизации и компенсации движения объекта, при использовании данных с датчика определения угловых скоростей либо угловых скоростей и ускорений привода слежения оптико-электронной системы.
Источники информации
1. Патент Российской федерации 2211473, МПК G05D 3/12 (2000.01), 2001 г., прототип.
2. Патент Российской федерации 2168753, МПК G05D 3/12, 2000 г., прототип.
3. Магнус К. "Гироскоп. Теория и применение", М., "Мир", 1974 г., стр. 401-407.
4. Бесекерский В.А., Попов Е.П. "Теория систем автоматического регулирования", М., "Наука", 1973 г.
5. Чакраварти Дипто, Кэннон Кейси. "PowerPC: концепции, архитектура и дизайн", "Макгроу Хилл", 1994 г.
6. Беленький. Ю.М., Епифанова Л.М., Микеров А.Г. и др. "Бесконтактный моментный привод для замкнутых систем автоматического управления", "Электротехника", 1986.
7. Распопов В.Я. Теория гироскопических систем. Гиростабилизаторы. Тула: Издательсво ТулГУ, 2016. - 388 с. ISBN 978-8125-2205-6.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОМБИНИРОВАННАЯ СИСТЕМА СОПРОВОЖДЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2008 |
|
RU2389041C2 |
| СИСТЕМА СОПРОВОЖДЕНИЯ | 2007 |
|
RU2364886C1 |
| СЛЕДЯЩАЯ СИСТЕМА СОПРОВОЖДЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2008 |
|
RU2381524C1 |
| СИСТЕМА СОПРОВОЖДЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2008 |
|
RU2388010C1 |
| ИНТЕГРИРОВАННАЯ АВТОМАТИЧЕСКАЯ СИСТЕМА СОПРОВОЖДЕНИЯ | 2012 |
|
RU2498345C1 |
| СЛЕДЯЩАЯ НАБЛЮДАТЕЛЬНАЯ СИСТЕМА | 2001 |
|
RU2211473C2 |
| ИНТЕГРИРОВАННАЯ НАБЛЮДАТЕЛЬНАЯ СИСТЕМА СОПРОВОЖДЕНИЯ | 2007 |
|
RU2327188C1 |
| СИСТЕМА СОПРОВОЖДЕНИЯ | 2000 |
|
RU2197002C2 |
| ОПТИКО-ЭЛЕКТРОННАЯ СИСТЕМА УПРАВЛЕНИЯ | 2000 |
|
RU2172010C1 |
| СЛЕДЯЩАЯ ЛОКАЦИОННО-ОПТИЧЕСКАЯ СИСТЕМА СОПРОВОЖДЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2006 |
|
RU2325671C1 |
Группа изобретений относится к области управления системами слежения за подвижными объектами. Способ слежения за объектом заключается в дискретном приеме измеренных координат объекта слежения от сопровождаемого объекта, переводе сигналов ошибок слежения для каждого источника видеосигнала в стабилизированную систему координат, вычислении выходных сигналов управления слежением, преобразование выходных сигналов управления в измерительную систему координат, дискретном приеме измеренных ошибок стабилизации и последующем вычислении по ошибкам стабилизации коррекции положения центра поля зрения. При этом в процессе стабилизации принимаются в дискретные моменты времени координаты центра поля зрения, по которым вычисляется компенсация, учитывающая движение сопровождаемого объекта, и вычисляется изменение положения поля зрения в соответствии с коррекцией и с учетом компенсирующей связи. Система слежения за объектом состоит из последовательно соединенных оптико-электронного пеленгатора, вычислительной системы, привода слежения, механически связанного с оптико-электронным пеленгатором и гироскопическим датчиком, датчика измерения угловых скоростей привода слежения, механически связанного с приводом слежения. Вычислительная система состоит из последовательно соединенных первого и второго вычислителей, позволяющих обрабатывать поступающие из оптико-электронного пеленгатора сигналы и на основе их формировать управление приводом слежения оптико-электронной системы. Способ компенсации движения объекта заключается в дискретном приеме измеренных ошибок стабилизации и последующем вычислении по измеренным ошибкам коррекции положения поля измерения, при этом в процессе стабилизации в дискретные моменты времени вычисляются координаты поля зрения, компенсация по измеренным координатам с учетом обратной модели динамики изменения положения центра поля зрения и коррекция положения поля зрения с учетом полученной компенсации. В качестве координат поля зрения используется угловая скорость или угловая скорость и ускорение изменения его положения. Изобретение обеспечивает повышение точности при выполнении задач сопровождения скоростных маневренных объектов за счет учета параметров движения объекта, внедрения алгоритмов стабилизации и компенсирующих связей, а также использования данных с датчика определения угловых скоростей привода слежения оптико-электронной системы. 3 н. и 2 з.п. ф-лы, 2 ил.
1. Способ слежения за объектом, включающий дискретный прием измеренных координат объекта слежения в измерительной системе координат, представляющих собой сигналы ошибок слежения, перевод полученных сигналов ошибок слежения в стабилизированную систему координат, расчет выходных сигналов управления слежением по сигналам ошибок слежения в стабилизированной системе координат, преобразование выходных сигналов управления в измерительную систему координат, дискретный прием измеренных сигналов ошибок поля зрения относительно его центральной оси в измерительной системе координат и преобразование их в исполнительную систему координат, вычисление по этим сигналам ошибок стабилизации сигналов коррекции положения центра поля зрения в исполнительной системе координат, отличающийся тем, что после расчета сигналов коррекции положения центра поля зрения в исполнительной системе координат осуществляют процесс компенсации движения объекта, далее вычисляются выходные команды изменения положения центра поля зрения в исполнительной системе координат в соответствии с сигналами коррекции положения центра поля зрения и с учетом компенсации движения объекта.
2. Способ слежения за объектом по п. 1, отличающийся тем, что расчет выходных сигналов управления слежением по сигналам ошибки слежения в стабилизированной системе координат осуществляется пропорционально скорости движения объекта.
3. Система слежения за объектом, включающая последовательно соединенные оптико-электронный пеленгатор, вычислительную систему, привод слежения, выход которого соединен со входами с оптико-электронного пеленгатора и гироскопического датчика угла, выход которого соединен со вторым входом вычислительной системы, а второй вход с первым выходом вычислительной системы, отличающаяся тем, что введен датчик измерения угловых координат привода слежения, обеспечивающий измерение координат центра поля зрения в исполнительной системе координат, вход которого соединен с выходом привода слежения, а выход соединен с третьим входом вычислительной системы, также вычислительная система, обеспечивающая компенсацию движения объекта по измеренным в исполнительной системе координат центра поля зрения и формирующая команды компенсации к сигналам управления приводом слежения, включает последовательно соединенные первый и второй вычислители, при этом первый вход вычислительной системы является первым входом первого вычислителя, второй вход которого является вторым входом вычислительной системы, первый выход которой является вторым выходом первого вычислителя, третий вход вычислительной системы является вторым входом второго вычислителя, а первый выход которого является вторым выходом вычислительной системы.
4. Система слежения за объектом по п. 3, отличающаяся тем, что параллельно датчику измерения угловых координат привода слежения подсоединен еще один датчик измерения угловых координат привода слежения.
5. Способ компенсации движения объекта, включающий дискретный прием измеренных ошибок управления, представляющих разницу между необходимым и истинным положением центра поля управления, в измерительной системе координат и преобразование их в исполнительную систему координат, вычисление по измеренным ошибкам сигналов коррекции положения центра поля зрения в исполнительной системе координат, отличающийся, тем, что в дискретные моменты времени после расчета сигналов коррекции положения центра поля зрения принимаются измеренные координаты центра поля зрения в исполнительной системе координат, вычисляются по измеренным координатам сигналы компенсации движения объекта с учетом обратной модели динамики изменения положения центра поля зрения, вычисляются выходные команды изменения положения центра поля зрения в исполнительной системе координат пропорционально сигналам коррекции положения центра поля зрения и сигналам компенсации движения объекта.
| СЛЕДЯЩАЯ НАБЛЮДАТЕЛЬНАЯ СИСТЕМА | 2001 |
|
RU2211473C2 |
| Способ управления объектом, система управления (варианты) и способ обработки сигналов (варианты) | 2016 |
|
RU2627964C1 |
| СПОСОБ СЛЕЖЕНИЯ ЗА ПОДВИЖНЫМ ОБЪЕКТОМ | 2011 |
|
RU2473934C1 |
| СПОСОБ СЛЕЖЕНИЯ ЗА ПОДВИЖНЫМ ОБЪЕКТОМ | 2011 |
|
RU2453810C1 |
| СПОСОБ СЛЕЖЕНИЯ ЗА ОБЪЕКТОМ И ЦИФРОВАЯ ТЕЛЕВИЗИОННАЯ СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2010 |
|
RU2440691C1 |

