Изобретение относится к области оптико-электронных систем управления, предназначенных преимущественно для автоматического сопровождения подвижных объектов с перемещающегося основания и может быть использовано в образцах техники, работающих в условиях воздействия помех и пропадании информационных сигналов, а также в установках для научных исследований.
Известен способ управления [патент РФ 2191407 от 23.10.2000, G01S 17/66, G05D 3/12, Н04N 7/18 (прототип)], заключающийся в том, что выделяют сигнал ошибки управления, управляют объектом, организуют цепь обратной связи по выходной координате, формируют признак недостоверности сигнала ошибки, при отсутствии этого признака производят оценку входного сигнала, а при наличии признака недостоверности сигнала ошибки управления проводят прогнозирование входного сигнала.
Система управления для осуществления указанного способа, и выбранная в качестве прототипа [патент РФ 2191407 от 23.10.2000, G01S 17/66, G05D 3/12, Н04N 7/18 (прототип)] содержит последовательно соединенные оптико-электронный прибор (устройство выделения ошибки), блок определения координат в стробе, первый коммутатор, блок формирования координат в растре, второй коммутатор, на второй вход которого подается сигнал с выхода устройства прогнозирования координат, устройства наведения и стабилизации (объект управления), выход которого соединен со вторым входом оптико-электронного прибора и со вторым входом устройства прогнозирования координат (устройство обработки сигналов), а первый вход устройства прогнозирования координат соединен с выходом блока формирования координат в растре.
Недостатком указанных технических решений является использование формирователя логики инерционного сопровождения (ФЛИС), работающего в прямоугольной системе координат, поэтому переключение управления устройства наведения и стабилизации проводится по отфильтрованному признаку срыва сопровождения, при этом на кратковременных интервалах времени устройства наведения и стабилизации остается разомкнутым, то есть на выходе блока определения координат в стробе формируется максимально возможный сигнал, который, поступая на вход устройства наведения и стабилизации, вызывает движение выходного вала с постоянным ускорением. Это приводит к формированию значительного смещения оптической оси оптико-электронного прибора относительно объекта слежения (вплоть до выхода изображения объекта слежения из поля зрения). Также к недостаткам можно отнести использование второго коммутатора, так как при переключении возможно значительное рассогласование между выходами блока формирования координат в растре и устройства прогнозирования координат, что приводит к возникновению переходного процесса при управлении выходным валом. Еще одним недостатком является использование блока задания программного перемещения для восстановления автоматического сопровождения. При условии, что переход в инерцию был обусловлен воздействием оптических помех, изображение которых сходно с изображением объекта слежения, возможна ситуация, когда в стробе будет изображение помехи, что приведет к ее захвату на автосопровождение. Кроме того, при автосопровождении объекта оптико-электронным прибором в устройстве прогнозирования координат в соответствии с ожидаемым положением объекта в пространстве по сигналу с выхода устройства наведения и стабилизации, координатами объекта в растре, полученных из блока формирования координат в растре, формируется полная координата объекта. На основании этих координат и принятой гипотезы о траектории объекта в устройстве прогнозирования координат рассчитываются параметры этой траектории с использованием, например, методов наименьших квадратов, наибольшего правдоподобия, сплайн-функций и т.п. При автоматическом сопровождении управление устройством наведения и стабилизации осуществляется пропорционально ошибки управления, что не позволяет обеспечить отработку высоко динамичных управляющих воздействий при движущихся и маневрирующих объектов слежения и даже может происходить срыв сопровождения. При инерционном сопровождении осуществляется переходе на сопровождение по прогнозируемым координатам. Следовательно, при управлении устройством наведения и стабилизации в инерционном режиме по прогнозируемым координатам не учитываются инерционные свойства объекта слежения. В случае отсутствия возможности или нецелесообразности измерения выходных координат и измерения команд управления затруднена возможность прогнозирования ошибки управления. В связи с этим динамика формирования команд управления в инерционном режиме будет не соответствовать динамике формирования команд управления объектом в автоматическом режиме, что также ухудшит точность работы системы управления.
Способ обработки сигналов [патент РФ 2318234 от 02.02.2006, Н01S 3/102 (прототип)], заключающийся в том, что измеряют ошибку управления и команды управления, формируют признак отсутствия (недостоверности) сигнала ошибки управления, при отсутствии этого признака осуществляют оценку производных входного сигнала и фильтрацию ошибки управления, при наличии признака отсутствие сигнала ошибки управления производится прогнозирование производных входного сигнала и ошибки управления.
Недостатком известного способа обработки сигналов является то, что при оценке и прогнозировании производных входного сигнала не учитываются инерционных свойств объекта слежения, а при прогнозировании ошибки управления не учитываются инерционные свойства объекта управления. Это приводит к неправильному формирования ошибки управления в инерционном режиме, а следовательно уменьшению точности и даже срыву управления.
Общим недостатком указанных технических решений является низкая точность работы системы в условиях помех и пропадания сигнала ошибки управления.
Задачей изобретения является повышение помехоустойчивости и повышение устойчивости и точности отработки высоко динамических управляющих воздействий в условиях помех измерения, прерывании оптической связи и в условиях возмущений, вызванных работой комплекса, увеличение допустимого времени нахождения в инерционном режиме, снижение вероятности срыва сопровождения объекта, снижение вероятности ложного захвата объекта.
Решение поставленной задачи достигается тем, что в способе управления объектом включающем, выделение сигнала ошибки управления, формирование команды управления объектом, формирование признака недостоверности сигнала ошибки управления, при отсутствии этого признака производится фильтрация сигнала ошибки управления, формирование сигнала компенсации фазового запаздывания фильтрации сигнала ошибки управления, а при наличии признака недостоверности сигнала ошибки управления проводится прогнозирование сигнала ошибки управления и формирование по ней команд управления, при этом передаточная функция образовавшегося с помощью цепи внутренней обратной связи замкнутого контура выбирается в соответствии с передаточной функцией системы управления объектом, в процессе управления формируется обратная связь по выходным координатам или по командам управления, при отсутствии признака недостоверности сигнала ошибки управления фильтрация сигнала ошибки управления осуществляется с учетом инерционных свойств входного сигнала и объекта управления, а управление производится по неотфильтрованному или отфильтрованному сигналу ошибки управления, при наличии признака недостоверности сигнала ошибки прогнозирование сигнала ошибки управления производится с учетом сигнала по цепи внутренней обратной связи и инерционных свойств входного сигнала и объекта управления.
Для осуществления способа система управления, включающая последовательно соединенные объект управления, устройство выделения ошибки, устройство обработки сигналов и блок переключения, второй вход которого соединен с выходом устройства выделения ошибки, снабжена блоком компенсации фазового запаздывания, выход которого соединен со вторым входом устройства обработки сигналов, а вход с выходом объекта управления, и блоком управления, вход которого соединен с выходом блока переключения, а выход со входом объекта управления.
Для осуществления способа система управления, включающая последовательно соединенные объект управления, устройство выделения ошибки, устройство обработки сигналов и блок переключения, второй вход которого соединен с выходом устройства выделения ошибки, снабжена блоком компенсации фазового запаздывания, выход которого соединен с со вторым входом устройства обработки сигналов, и блоком управления, вход которого соединен с выходом блока переключения, а выход с входами объекта управления и блока компенсации фазового запаздывания.
В обеих системах управления, реализующих указанный способ, объект управления представляет собой исполнительный привод, вход которого является входом объекта управления, а выход - выходом объекта управления.
В обеих системах управления, реализующих указанный способ, объект управления представляет собой последовательно соединенные гироскопический датчик угла, вход которого является входом объекта управления, и исполнительный привод, выход которого является выходом объекта управления.
Решение поставленной задачи достигается тем, что в способе обработки сигналов включающем измерение значений сигнала ошибки управления ивх, формирование признака недостоверности сигнала ошибки управления,
при отсутствии этого признака осуществляется фильтрация измеренных значений сигнала ошибки управления, формирование разницы между измеренным ивх и отфильтрованным ивхо значениями ошибки управления, в соответствии с полученной разницей производится оценка значения входного сигнала ио, оценка значения скорости входного сигнала  , оценка значения ускорения входного сигнала
, оценка значения ускорения входного сигнала  , а при наличии признака недостоверности сигнала ошибки управления осуществляется формирование прогнозируемого значения сигнала ошибки управления ивхп, оценки прогнозируемого значения входного сигнала ип, оценки прогнозируемого значения скорости входного сигнала
, а при наличии признака недостоверности сигнала ошибки управления осуществляется формирование прогнозируемого значения сигнала ошибки управления ивхп, оценки прогнозируемого значения входного сигнала ип, оценки прогнозируемого значения скорости входного сигнала  , оценки прогнозируемого значения ускорения входного сигнала
, оценки прогнозируемого значения ускорения входного сигнала  , осуществляется измерение значений выходного сигнала ивых объекта управления, при отсутствии признака недостоверности сигнала ошибки управления осуществляется оценка значения входного сигнала ио с учетом инерционности изменения входного сигнала, оценка значения скорости входного сигнала
, осуществляется измерение значений выходного сигнала ивых объекта управления, при отсутствии признака недостоверности сигнала ошибки управления осуществляется оценка значения входного сигнала ио с учетом инерционности изменения входного сигнала, оценка значения скорости входного сигнала  с учетом инерционности изменения скорости входного сигнала, оценка значения ускорения входного сигнала
с учетом инерционности изменения скорости входного сигнала, оценка значения ускорения входного сигнала  с учетом инерционности изменения ускорения входного сигнала, при этом реализуются следующие зависимости
с учетом инерционности изменения ускорения входного сигнала, при этом реализуются следующие зависимости
 ;
;
 ;
;
 ;
;
 ,
,
где k1и - коэффициент, учитывающий инерционность изменения входного сигнала,
k2и - коэффициент, учитывающий инерционность изменения скорости входного сигнала,
k3и - коэффициент, учитывающий инерционность изменения ускорения входного сигнала,
k1п - коэффициент, учитывающий влияние скорости входного сигнала,
k2п - коэффициент, учитывающий влияние ускорения входного сигнала,
k3п - коэффициент, учитывающий влияние выходного сигнала,
kкфз - коэффициент компенсации фазового запаздывания,
kl - коэффициент, учитывающий быстроту оценки входного сигнала,
k2 - коэффициент, учитывающий быстроту оценки скорости входного сигнала,
k3 - коэффициент, учитывающий быстроту оценки ускорения входного сигнала,
при наличии признака недостоверности сигнала ошибки управления осуществляется оценка прогнозируемого значения входного сигнала ип с учетом прогнозируемой инерционности изменения входного сигнала, оценка прогнозируемого значения скорости входного сигнала  с учетом прогнозируемой инерционности изменения скорости входного сигнала, оценка прогнозируемого значения ускорения входного сигнала
с учетом прогнозируемой инерционности изменения скорости входного сигнала, оценка прогнозируемого значения ускорения входного сигнала  с учетом прогнозируемой инерционности изменения ускорения входного сигнала, при этом реализуются следующие зависимости
с учетом прогнозируемой инерционности изменения ускорения входного сигнала, при этом реализуются следующие зависимости
 ;
;
 ;
;
 ;
;
 ,
,
где k1пи - коэффициент, учитывающий прогнозируемую инерционность изменения входного сигнала,
k2пи - коэффициент, учитывающий прогнозируемую инерционность изменения скорости входного сигнала,
k2пи - коэффициент, учитывающий прогнозируемую инерционность изменения ускорения входного сигнала.
Решение поставленной задачи достигается тем, что в способе обработки сигналов включающем измерение значений сигнала ошибки управления ивх, формирование признака недостоверности сигнала ошибки управления,
при отсутствии этого признака осуществляется фильтрация измеренных значений сигнала ошибки управления, формирование разницы между измеренным ивх и отфильтрованным ивхо значениями ошибки управления, в соответствии с полученной разницей производится оценка значения входного сигнала ио, оценка значения скорости входного сигнала  , оценка значения ускорения входного сигнала
, оценка значения ускорения входного сигнала  , а при наличии признака недостоверности сигнала ошибки управления осуществляется формирование прогнозируемого значения сигнала ошибки управления ивхп, оценки прогнозируемого значения входного сигнала ип, оценки прогнозируемого значения скорости входного сигнала
, а при наличии признака недостоверности сигнала ошибки управления осуществляется формирование прогнозируемого значения сигнала ошибки управления ивхп, оценки прогнозируемого значения входного сигнала ип, оценки прогнозируемого значения скорости входного сигнала  , оценки прогнозируемого значения ускорения входного сигнала
, оценки прогнозируемого значения ускорения входного сигнала  , осуществляется измерение значений выходного сигнала ивых объекта управления, при отсутствии признака недостоверности сигнала ошибки управления осуществляется оценка прогнозируемого значения входного сигнала ип с учетом инерционности изменения входного сигнала, оценка прогнозируемого значения скорости входного сигнала
, осуществляется измерение значений выходного сигнала ивых объекта управления, при отсутствии признака недостоверности сигнала ошибки управления осуществляется оценка прогнозируемого значения входного сигнала ип с учетом инерционности изменения входного сигнала, оценка прогнозируемого значения скорости входного сигнала  с учетом инерционности изменения скорости входного сигнала, оценка прогнозируемого значения ускорения входного сигнала с учетом инерционности изменения ускорения входного сигнала, оценка значения входного сигнала ио с учетом оценки прогнозируемого значения входного сигнала, оценка значения скорости входного сигнала
с учетом инерционности изменения скорости входного сигнала, оценка прогнозируемого значения ускорения входного сигнала с учетом инерционности изменения ускорения входного сигнала, оценка значения входного сигнала ио с учетом оценки прогнозируемого значения входного сигнала, оценка значения скорости входного сигнала  с учетом оценки прогнозируемого значения скорости входного сигнала, оценка значения ускорения входного сигнала
с учетом оценки прогнозируемого значения скорости входного сигнала, оценка значения ускорения входного сигнала  с учетом оценки прогнозируемого значения ускорения входного сигнала, при этом реализуются следующие зависимости
с учетом оценки прогнозируемого значения ускорения входного сигнала, при этом реализуются следующие зависимости 






где k1и - коэффициент, учитывающий инерционность изменения входного сигнала,
k2и - коэффициент, учитывающий инерционность изменения скорости входного сигнала,
k3и - коэффициент, учитывающий инерционность изменения ускорения входного сигнала,
k1п - коэффициент, учитывающий влияние скорости входного сигнала,
k2п, k3п - коэффициенты, учитывающие влияние ускорения входного сигнала,
k4п - коэффициент, учитывающий влияние выходного сигнала,
kкфз - коэффициент компенсации фазового запаздывания,
k1 - коэффициент, учитывающий быстроту оценки входного сигнала,
k2 - коэффициент, учитывающий быстроту оценки скорости входного сигнала,
k3 - коэффициент, учитывающий быстроту оценки ускорения входного сигнала,
при наличии признака недостоверности сигнала ошибки управления осуществляется оценка прогнозируемого значения входного сигнала ип с учетом прогнозируемой инерционности изменения входного сигнала, оценка прогнозируемого значения скорости входного сигнала  с учетом прогнозируемой инерционности изменения скорости входного сигнала, оценка прогнозируемого значения ускорения входного сигнала
с учетом прогнозируемой инерционности изменения скорости входного сигнала, оценка прогнозируемого значения ускорения входного сигнала  с учетом прогнозируемой инерционности изменения ускорения входного сигнала, при этом реализуются следующие зависимости
с учетом прогнозируемой инерционности изменения ускорения входного сигнала, при этом реализуются следующие зависимости




где kпи - коэффициент, учитывающий прогнозируемую инерционность изменения входного сигнала,
k2пи - коэффициент, учитывающий прогнозируемую инерционность изменения скорости входного сигнала,
k3пи - коэффициент, учитывающий прогнозируемую инерционность изменения ускорения входного сигнала.
Решение поставленной задачи достигается тем, что в способе обработки сигналов включающем измерение значений сигнала ошибки управления ивх и команды управления иупр, формирование признака недостоверности сигнала ошибки управления, при отсутствии этого признака осуществляется фильтрация измеренных значений сигнала ошибки управления, формирование разницы между измеренным ивх и отфильтрованным ивхо значениями ошибки управления, в соответствии с полученной разницей производится оценка значения скорости входного сигнала  , оценка значения ускорения входного сигнала
, оценка значения ускорения входного сигнала  , а при наличии признака недостоверности сигнала ошибки управления осуществляется формирование прогнозируемого значения сигнала ошибки управления ивхп, оценки прогнозируемого значения скорости входного сигнала
, а при наличии признака недостоверности сигнала ошибки управления осуществляется формирование прогнозируемого значения сигнала ошибки управления ивхп, оценки прогнозируемого значения скорости входного сигнала  , оценки прогнозируемого значения ускорения входного сигнала
, оценки прогнозируемого значения ускорения входного сигнала  , при отсутствии признака недостоверности сигнала ошибки управления осуществляется оценка отфильтрованного значения ошибки управления ивхо с учетом инерционности изменения входного и выходного сигналов, оценка значения скорости входного сигнала
, при отсутствии признака недостоверности сигнала ошибки управления осуществляется оценка отфильтрованного значения ошибки управления ивхо с учетом инерционности изменения входного и выходного сигналов, оценка значения скорости входного сигнала  с учетом инерционности изменения скорости входного сигнала, оценка значения ускорения входного сигнала
с учетом инерционности изменения скорости входного сигнала, оценка значения ускорения входного сигнала  с учетом инерционности изменения ускорения входного сигнала, при этом реализуются следующие зависимости
с учетом инерционности изменения ускорения входного сигнала, при этом реализуются следующие зависимости
 ;
;
 ;
;
 ;
;
где k1и - коэффициент, учитывающий инерционность изменения входного и выходного сигналов,
k2и - коэффициент, учитывающий инерционность изменения скорости входного сигнала,
k3и - коэффициент, учитывающий инерционность изменения ускорения входного сигнала,
k1п - коэффициент, учитывающий влияние скорости входного сигнала,
k2п - коэффициент, учитывающий влияние ускорения входного сигнала,
k3п, k4п - коэффициенты, учитывающие влияние команды управления,
kкфз - коэффициент компенсации фазового запаздывания,
k1 - коэффициент, учитывающий быстроту оценки входного сигнала,
k2 - коэффициент, учитывающий быстроту оценки скорости входного сигнала,
k3 - коэффициент, учитывающий быстроту оценки ускорения входного сигнала,
при наличии признака недостоверности сигнала ошибки управления осуществляется оценка прогнозируемого значения сигнала ошибки управления ивхп с учетом прогнозируемой инерционности изменения входного и выходного сигналов, оценка прогнозируемого значения скорости входного сигнала  с учетом прогнозируемой инерционности изменения скорости входного сигнала, оценка прогнозируемого значения ускорения входного сигнала
с учетом прогнозируемой инерционности изменения скорости входного сигнала, оценка прогнозируемого значения ускорения входного сигнала  с учетом прогнозируемой инерционности изменения ускорения входного сигнала, при этом реализуются следующие зависимости
с учетом прогнозируемой инерционности изменения ускорения входного сигнала, при этом реализуются следующие зависимости
 ;
;
 ;
;
 ,
,
где k1пи - коэффициент, учитывающий прогнозируемую инерционность изменения входного и выходного сигналов,
k2пи - коэффициент, учитывающий прогнозируемую инерционность изменения скорости входного сигнала,
k3пи - коэффициент, учитывающий прогнозируемую инерционность изменения ускорения входного сигнала.
Решение поставленной задачи достигается тем, что в способе обработки сигналов включающем измерение значений сигнала ошибки управления ивх и команд управления иупр, формирование признака недостоверности сигнала ошибки управления, при отсутствии этого признака осуществляется фильтрация измеренных значений сигнала ошибки управления, формирование разницы между измеренным ивх и отфильтрованным ивхо значениями ошибки управления, в соответствии с полученной разницей производится оценка значения скорости входного сигнала  , оценка значения ускорения входного сигнала
, оценка значения ускорения входного сигнала  , а при наличии признака недостоверности сигнала ошибки управления осуществляется формирование прогнозируемого значения сигнала ошибки управления ивхп, оценки прогнозируемого значения скорости входного сигнала
, а при наличии признака недостоверности сигнала ошибки управления осуществляется формирование прогнозируемого значения сигнала ошибки управления ивхп, оценки прогнозируемого значения скорости входного сигнала  , оценки прогнозируемого значения ускорения входного сигнала
, оценки прогнозируемого значения ускорения входного сигнала  , при отсутствии признака недостоверности сигнала ошибки управления осуществляется оценка прогнозируемого значения сигнала ошибки управления ивхп с учетом инерционности изменения входного и выходного сигналов, оценка прогнозируемого значения скорости входного сигнала
, при отсутствии признака недостоверности сигнала ошибки управления осуществляется оценка прогнозируемого значения сигнала ошибки управления ивхп с учетом инерционности изменения входного и выходного сигналов, оценка прогнозируемого значения скорости входного сигнала  с учетом инерционности изменения скорости входного сигнала, оценка прогнозируемого значения ускорения входного сигнала
с учетом инерционности изменения скорости входного сигнала, оценка прогнозируемого значения ускорения входного сигнала  с учетом инерционности изменения ускорения входного сигнала, оценка отфильтрованного значения сигнала ошибки управления ивхо с учетом оценки прогнозируемого значения сигнала ошибки управления, оценка значения скорости входного сигнала
с учетом инерционности изменения ускорения входного сигнала, оценка отфильтрованного значения сигнала ошибки управления ивхо с учетом оценки прогнозируемого значения сигнала ошибки управления, оценка значения скорости входного сигнала  с учетом оценки прогнозируемого значения скорости входного сигнала, оценка значения ускорения входного сигнала
с учетом оценки прогнозируемого значения скорости входного сигнала, оценка значения ускорения входного сигнала  с учетом оценки прогнозируемого значения ускорения входного сигнала, при этом
с учетом оценки прогнозируемого значения ускорения входного сигнала, при этом






где k1и - коэффициент, учитывающий инерционность изменения входного и выходного сигналов,
k2и - коэффициент, учитывающий инерционность изменения скорости входного сигнала,
k3и - коэффициент, учитывающий инерционность изменения ускорения входного сигнала,
k1п - коэффициент, учитывающий влияние скорости входного сигнала,
k2п, k3п - коэффициенты, учитывающие влияние ускорения входного сигнала,
k4п, k5п - коэффициенты, учитывающие влияние команды управления,
kкфз - коэффициент компенсации фазового запаздывания,
k1 - коэффициент, учитывающий быстроту оценки входного сигнала,
k2 - коэффициент, учитывающий быстроту оценки скорости входного сигнала,
k3 - коэффициент, учитывающий быстроту оценки ускорения входного сигнала,
при наличии признака недостоверности сигнала ошибки управления осуществляется оценка прогнозируемого значения сигнала ошибки управления ивхп с учетом прогнозируемой инерционности изменения входного и выходного сигналов, оценка значения скорости входного сигнала с учетом прогнозируемой инерционности изменения скорости входного сигнала, оценка значения ускорения входного сигнала с учетом прогнозируемой инерционности изменения ускорения входного сигнала, при этом



где k1пи - коэффициент, учитывающий прогнозируемую инерционность изменения и выходного сигналов,
k2пи - коэффициент, учитывающий прогнозируемую инерционность изменения скорости входного сигнала,
k3пи - коэффициент, учитывающий прогнозируемую инерционность изменения ускорения входного сигнала.
По любому из четырех способах обработки сигналов при неучете инерционности изменения входного сигнала все составляющие в оценках пропорциональные коэффициенту, учитывающему инерционность изменения входного и выходного сигналов, исключаются.
По любому из четырех способах обработки сигналов при неучете инерционности изменения скорости входного сигнала все составляющие в оценках пропорциональные коэффициенту, учитывающему инерционность изменения скорости входного сигнала, исключаются.
По любому из четырех способах обработки сигналов при неучете инерционности изменения ускорения входного сигнала все составляющие в оценках пропорциональные коэффициенту, учитывающему инерционность изменения ускорения входного сигнала, исключаются.
В заявляемых технических решениях предлагается для повышения помехоустойчивости системы осуществлять обработку высокочастотных помех в сигналах ошибок управления с учетом выходных координат или команд управления, а для повышения устойчивости и точности при отработке высоко динамических управляющих воздействий в условиях пропадания входных сигналов осуществлять изменение составляющей команды управления объектом пропорциональной прогнозируемому входному сигналу с учетом инерционных свойств объектов слежения и управления, а также сигнала обратной связи по выходным координатам или командам управления.
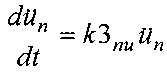
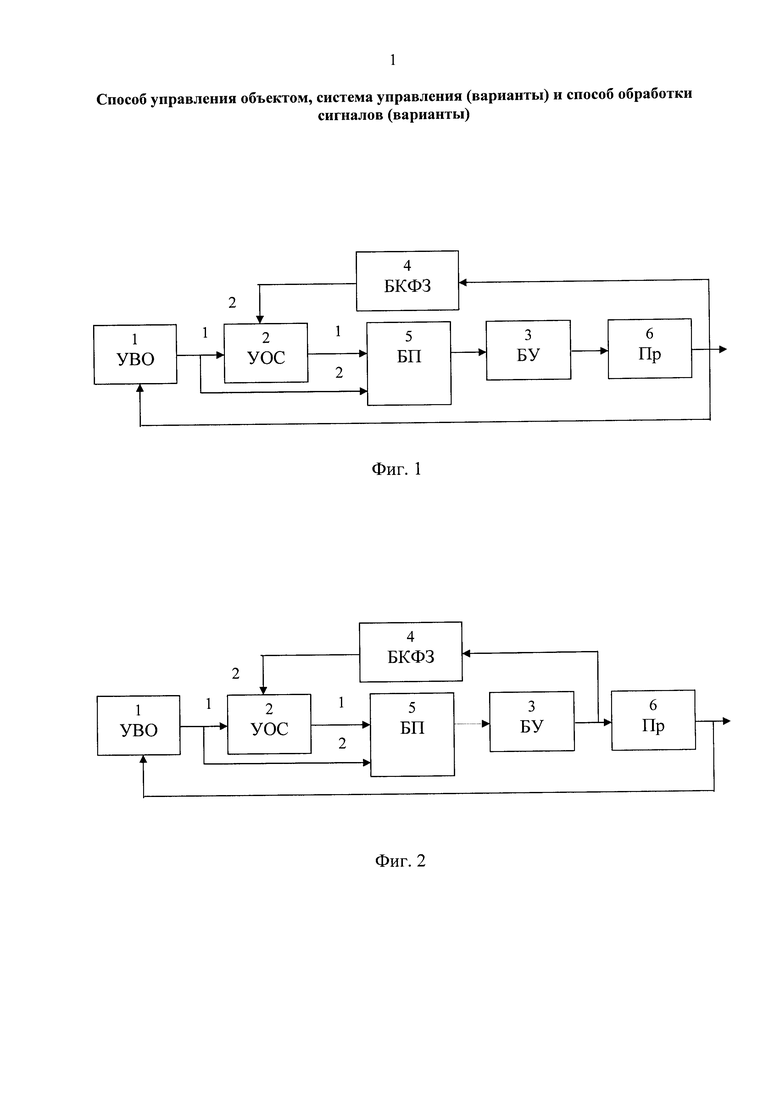
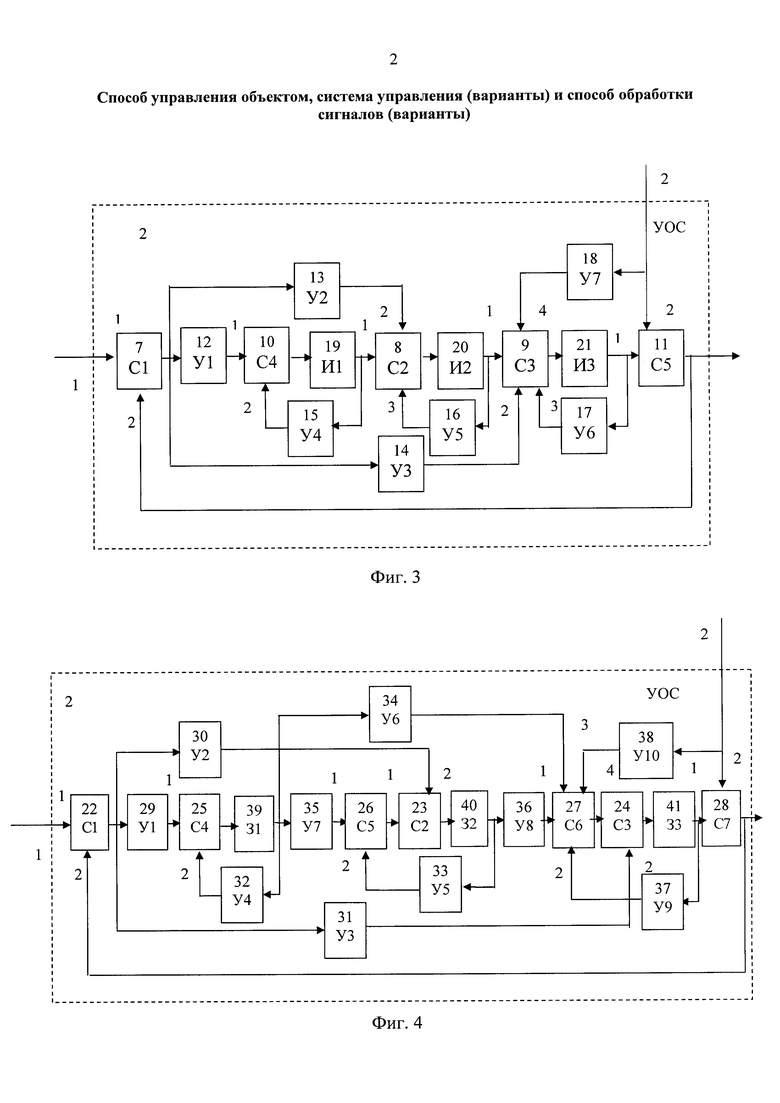
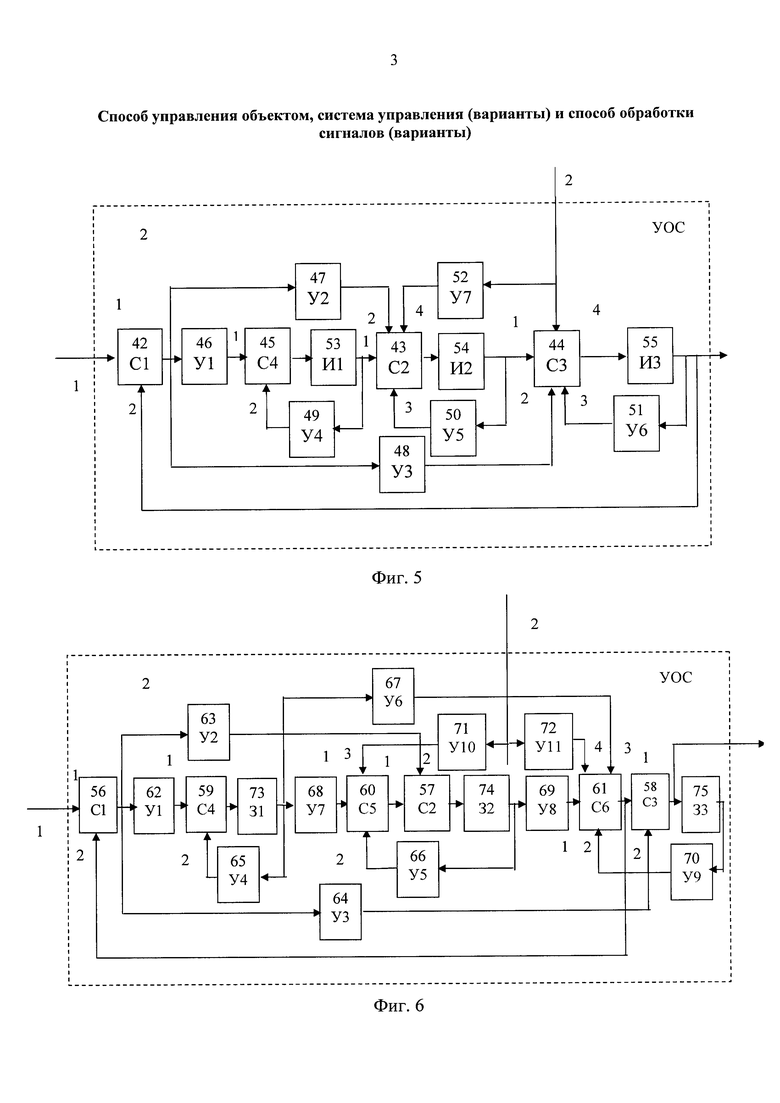
Предлагаемые технические решения поясняются фиг. 1-6. На фиг. 1 представлен первый вариант системы управления, на фиг. 2 представлен второй вариант системы управления. На фиг. 3-6 представлена реализация с помощью соответственно первый, второй, третий и четвертый способов обработки сигналов.
Способ управления объектом включает выделение сигнала ошибки управления, формирование команды управления объектом, в процессе управления формирование обратной связи по выходным координатам или по командам управления так, что передаточная функция образовавшегося с помощью цепи внутренней обратной связи замкнутого контура выбирается в соответствии с передаточной функцией системы управления объектом, формирование признака недостоверности сигнала ошибки управления, при отсутствии этого признака производится фильтрация сигнала ошибки управления с учетом инерционных свойств входного сигнала и объекта управления, формирование сигнала компенсации фазового запаздывания фильтрации сигнала ошибки управления и формирование команд управления по неотфильтрованному или отфильтрованному сигналу ошибки управления, а при наличии признака недостоверности сигнала ошибки управления проводится прогнозирование сигнала ошибки управления с учетом цепи внутренней обратной связи и инерционных свойств входного сигнала и объекта управления и формирование по ней команд управления.
Фиг. 1 и 2 представляют собой варианты реализации способ управления объектом.
На фиг. 1 и 2 обозначено: 1 - устройство выделения ошибки (УВО); 2 - устройство обработки сигналов (УОС); 3 - блок управления (БУ); 4 - блок компенсации фазового запаздывания (БКФЗ); 5 - блок переключения (БП); 6 - объект управления - привод (Пр).
Реализацию первого варианта способа обработки сигналов поясняет фиг. 3, на которой обозначено: 7, 8, 9, 10, 11 - первый, второй, третий, четвертый, пятый сумматоры; 12, 13, 14, 15, 16, 17, 18 - первый, второй, третий, четвертый, пятый, шестой, седьмой усилители; 19, 20, 21 - первый, второй и третий интеграторы.
Реализацию второго варианта способа обработки сигналов поясняет фиг. 4, на которой обозначено: 22, 23, 24, 25, 26, 27, 28 - первый, второй, третий, четвертый, пятый, шестой и седьмой сумматоры; 29, 30, 31, 32, 33, 34, 35, 36, 37, 38 - первый, второй, третий, четвертый, пятый, шестой, седьмой, восьмой, девятый, десятый усилители; 39, 40, 41 - первая, вторая и третья задержки.
Реализацию третьего варианта способа обработки сигналов поясняет фиг. 5, на которой обозначено: 42, 43, 44, 45 - первый, второй, третий, четвертый сумматоры; 46, 47, 48, 49, 50, 51, 52 - первый, второй, третий, четвертый, пятый, шестой, седьмой усилители; 53, 54, 55 - первый, второй и третий интеграторы.
Реализацию четвертого варианта способа обработки сигналов поясняет фиг. 6, на которой обозначено: 56, 57, 58, 59, 60, 61 - первый, второй, третий, четвертый, пятый и шестой сумматоры; 62, 63, 64, 65, 66, 67, 68, 69, 70, 71, 72 - первый, второй, третий, четвертый, пятый, шестой, седьмой, восьмой, девятый, десятый, одиннадцатый усилители; 73, 74, 75 - первая, вторая и третья задержки.
Устройство выделения ошибки 1 представляет собой пеленгационное устройство и предназначено для определения выходных координат объекта управления относительно требуемой траектории и выполнено по известной схеме (Белянский П.В., Сергеев Б.Б. Управление наземными антеннами и радиотелескопами. - М.: Сов. радио, 1980, с. 63-70, рис. 2.7-2.9) [1]. В качестве оптико-электронного прибора также могут быть использованы телевизионные камеры, тепловизоры, радиолокаторы, субмиллиметровые телескопы, визуализаторы ультрафиолетового и рентгеновского излучений аналогично прототипу.
Блок 3 представляет собой корректирующий фильтр (Лебедев А.А., Карабанов В.А. Динамика систем управления беспилотными летательными аппаратами. - М.: Машиностроение, 1965, с. 366-371, рис. 7.15) и обеспечивает требуемые динамические свойства (например, быстродействие, полоса пропускания, запасы устойчивости и др.) первого и второго вариантов системы управления.
Блок 5 представляет собой коммутатор (Алексенко А.Г., Коломбет Е.А., Стародуб Г.И. Применение прецизионных аналоговых ИС. - М.: Радио и связь, 1981, с. 190-193, рис.7.23б) [2].
Устройства 12, 13, 14, 15, 16, 17, 18, 29, 30, 31, 32, 33, 36, 37, 38, 46, 47, 48, 49, 50, 51, 52, 62, 63, 64, 65, 66, 70, 71 представляют собой усилитель с коэффициентом передачи регулируемым ([2] с. 57-59, рис. 2.3) в соответствии с формированием признака недостоверности или наличия сигнала ошибки в процессе управления.
Устройства 34, 35, 67, 68, 69, 72 представляют собой усилитель с постоянным коэффициентом передачи ([2] с. 57-59, таблица 2.1).
Устройства 7, 8, 10, 11, 22, 28, 42, 45, 56 представляют собой сумматор аналоговых сигналов с двумя входами (инвертирующим и не инвертирующим) ([2] с. 75-77, рис. 3.2).
Устройства 9 представляют собой сумматор аналоговых сигналов с тремя входами (одним инвертирующим и двумя не инвертирующими) ([2] с. 75-77, рис. 3.2).
Устройства 23, 24, 25, 26, 57, 58, 59 представляют собой сумматор аналоговых сигналов с двумя входами ([2] с. 75-77, рис. 3.1).
Устройство 27 представляет собой сумматор аналоговых сигналов с четырьмя входами ([2] с. 75-77, рис. 3.1).
Устройство 43, 61 представляет собой сумматор аналоговых сигналов с четырьмя входами (одним инвертирующим и три не инвертирующими) ([2] с. 75-77, рис. 3.2).
Устройство 44 представляет собой сумматор аналоговых сигналов с четырьмя входами (два инвертирующим и два не инвертирующими) ([2] с. 75-77, рис. 3.2).
Устройство 60 представляет собой сумматор аналоговых сигналов с тремя входами ([2] с. 75-77, рис. 3.1).
Интеграторы 19, 20, 21, 53, 54, 55 представляют собой аналоговый интегратор ([2] с. 77-79, табл. 3.1).
Устройства 39, 40, 41, 73, 74, 75 представляют собой устройства выборки и хранения ([2] с. 178-183, рис. 7.6).
Первый вариант объекта управления 6 представляет собой исполнительный привод выполнен по известной схеме ([1] с. 63-70, рис. 2.7-2.9). Исполнительное устройство может представлять собой пневматический, гидравлический, электропривод, в том числе на базе двух- и трехкоординатных моментных двигателей, и т.п.
Второй вариант объекта управления 6 представляет собой последовательно соединенные гироскопический датчик угла, выполненный по известной схеме (Магнус К. Гироскоп. Теория и применение. - М.: Мир, 1974, с. 401-407) и исполнительный привод, выполненный по известной схеме([1] с. 63-70, рис. 2.7-2.9).
Цифровая реализация первого, второго, третьего или четвертого вариантов устройства обработки сигналов, а также устройства 3, 4, 5 может быть осуществлена на логических микросхемах (Справочник по интегральным микросхемам. - М.: Энергия, 1981) или вычислительной системы (Васенков А.А. Микропроцессорные БИС и микро-ЭВМ. - М.: Советское радио, 1980).
Первый вариант система управления с первым и вторым вариантами объекта управления 6 работает следующим образом.
На выходе устройства 1 формируется сигнал пропорциональный величине ошибки управления ε, т.е. определяется разница между входным сигналом ϕвх и сигналом с выхода объекта управления 6 ϕвых. С выхода устройства 1 сигнал поступает на первый вход устройства обработки сигналов 2 и второй вход блока переключений 5. Сигнал с выхода устройства обработки сигналов 2 поступает через блок переключения 5 на вход блока управления 3. Сформированный в блоке 3 командный сигнал и поступает на вход привода 6, обеспечивая уменьшение ошибки управления ε. Сигнал с выхода привода 6 поступает через блок компенсации фазового запаздывания 4 на второй вход устройства обработки сигналов 2, обеспечивая компенсацию фазового запаздывания сигнала ошибки управления ε, вносимого устройством 2.
В первом варианте системы управления для первого и второго вариантов объекта управления 6 используются устройства 2, реализующие первый и второй варианты способа обработки сигналов.
Устройство 2, реализующее первый вариант способа обработки сигналов, работает следующим образом. Сигнал пропорциональный величине ошибки управления ε, поступающий на первый вход устройства 2, проходит через последовательно соединенные устройства 7, 12, 10, 19, 8, 20, 9, 21, 11, сигнал с выхода которого поступает на второй вход сумматора 7. Сигнал с выхода сумматора 7 поступает через усилитель 13 на второй вход сумматора 8, а через усилитель 14 на второй вход сумматора 9. Подача сигнала с выхода интегратора 19 через усилитель 15 на второй вход сумматора 10, сигнала с выхода интегратора 20 через усилитель 16 на третий вход сумматора 8, а также сигнала с выхода интегратора 21 через усилитель 17 на третий вход сумматора 9 обеспечивает учет инерционности изменения значений ускорения и скорости входного сигнала, а также значений входного и выходного сигналов соответственно. На выходе сумматора 11, являющимся выходом устройства 2, путем подачи на четвертый вход сумматора 9 через усилитель 18 выходного положения привода 6, подаваемому по второму входу устройства 2, и сравнения на сумматоре 11 сигнала с выхода интегратора 21 и выходного положения привода 6 обеспечивается формирование как отфильтрованного значения ошибки управления ε, так и его прогнозируемого значения в случае пропадания входного сигнала путем обнуления коэффициентов усилителей 12, 13 и 14, а также изменением коэффициентов усилителей 15, 16 и 17 в соответствии с прогнозируемыми инерционными свойствами объекта слежения и объекта управления 6, т.е. обеспечивается учет прогнозируемой инерционности изменения значений ускорения и скорости входного сигнала, а также значений входного и выходного сигналов соответственно.
Устройство 2, реализующее второй вариант обработки сигналов, работает следующим образом. Сигнал пропорциональный величине ошибки управления ε, поступающий на первый вход устройства 2, проходит через последовательно соединенные устройства 22, 29, 25, 39, 35, 26, 23, 40, 36, 27, 24, 41 и 28, сигнал с выхода которого поступает на второй вход сумматора 22. Сигнал с выхода сумматора 22 поступает через усилитель 30 на второй вход сумматора 23, а через усилитель 31 на второй вход сумматора 24. Подача с выхода задержки 39 сигнал через усилитель 32 на второй вход сумматора 25, сигнала с выхода задержки 40 через усилитель 33 на второй вход сумматора 26 и сигнала с выхода задержки 41 через усилитель 37 на второй вход сумматора 27 обеспечивает учет инерционности изменения значений ускорения и скорости входного сигнала, а также значений входного и выходного сигналов соответственно. При этом сигнал с выхода блока задержки 39 через усилитель 34 поступается на третий вход сумматора 27. На выходе сумматора 28, являющимся выходом устройства 2, путем подачи на четвертый вход сумматора 27 через усилитель 38 выходного положения привода 6, подаваемому по второму входу устройства 2, и сравнения на сумматоре 28 сигнала с выхода задержки 41 и выходного положения привода 6 обеспечивается формирование как отфильтрованного значения ошибки управления ε, так и его прогнозируемого значения в случае пропадания входного сигнала путем обнуления коэффициентов усилителей 29, 30 и 31, а также изменением коэффициентов усилителей 32, 33 и 37 в соответствии с прогнозируемыми инерционными свойствами объекта слежения и объекта управления 6, т.е. т.е. обеспечивается учет прогнозируемой инерционности изменения значений ускорения и скорости входного сигнала, а также значений входного и выходного сигналов соответственно.
Второй вариант система управления работает следующим образом.
На выходе устройства 1 формируется сигнал пропорциональный величине ошибки управления ε, т.е. определяется разница между входным сигналом ϕвх и сигналом с выхода объекта управления 6 ϕвых. С выхода устройства 1 сигнал поступает на первый вход устройства обработки сигналов 2 и на второй вход блока переключения 5. Сигнал с выхода устройства обработки сигналов 2 через блок 5 поступает на вход блока управления 3. Сформированный в блоке 3 командный сигнал u поступает через блок компенсации фазового запаздывания 4 на второй вход устройства обработки сигналов 2, обеспечивая компенсацию фазового запаздывания сигнала ошибки управления, вносимого устройством 2, и на вход привода 6, обеспечивая уменьшение ошибки управления ε.
Во втором варианте системы управления для первого варианта объекта управления 6 используется устройства 2, реализующее первый и второй варианты способа обработки сигналов.
Устройство 2, реализующее первый вариант способа обработки сигналов, работает следующим образом. Сигнал пропорциональный величине ошибки управления ε, поступающий на первый вход устройства 2, проходит через последовательно соединенные устройства 7, 12, 10, 19, 8, 20, 9, 21, 11, сигнал с выхода которого поступает на второй вход сумматора 7. Сигнал с выхода сумматора 7 поступает через усилитель 13 на второй вход сумматора 8, а через усилитель 14 на второй вход сумматора 9. Подача сигнала с выхода интегратора 19 через усилитель 15 на второй вход сумматора 10, сигнала с выхода интегратора 20 через усилитель 16 на третий вход сумматора 8 и сигнала с выхода интегратора 21 через усилитель 17 на третий вход сумматора 9 обеспечивает учет инерционности изменения значений ускорения и скорости входного сигнала, а также значений входного и выходного сигналов соответственно. На выходе сумматора 11, являющимся выходом устройства 2, путем подачи на четвертый вход сумматора 9 через усилитель 18 выходного положения привода 6, подаваемому по второму входу устройства 2, и сравнения на сумматоре 11 сигнала с выхода интегратора 21 и выходного положения привода 6 обеспечивается формирование как отфильтрованного значения ошибки управления ε, так и его прогнозируемого значения в случае пропадания входного сигнала путем обнуления коэффициентов усилителей 12, 13 и 14, а также изменением коэффициентов усилителей 15, 16 и 17 в соответствии с прогнозируемыми инерционными свойствами объекта слежения и объекта управления 6, т.е. обеспечивается учет прогнозируемой инерционности изменения значений ускорения и скорости входного сигнала, а также значений входного и выходного сигналов соответственно.
Устройство 2, реализующее второй вариант обработки сигналов, работает следующим образом. Сигнал пропорциональный величине ошибки управления ε, поступающий на первый вход устройства 2, проходит через последовательно соединенные устройства 22, 29, 25, 39, 35, 26, 23, 40, 36, 27, 24, 41 и 28, сигнал с выхода которого поступает на второй вход сумматора 22. Сигнал с выхода сумматора 22 поступает через усилитель 30 на второй вход сумматора 23, а через усилитель 31 на второй вход сумматора 24. Подача с выхода задержки 39 сигнала через усилитель 32 на второй вход сумматора 25, сигнала с выхода задержки 40 через усилитель 33 на второй вход сумматора 26 и сигнала с выхода задержки 41 через усилитель 37 на второй вход сумматора 27 обеспечивает учет инерционности изменения значений ускорения и скорости входного сигнала, а также значений входного и выходного сигналов соответственно. При этом сигнал с выхода блока задержки 39 через усилитель 34 поступается на третий вход сумматора 27. На выходе сумматора 28, являющимся выходом устройства 2, путем подачи на четвертый вход сумматора 27 через усилитель 38 выходного положения привода 6, подаваемому по второму входу устройства 2, и сравнения на сумматоре 28 сигнала с выхода задержки 41 и выходного положения привода 6 обеспечивается формирование как отфильтрованного значения ошибки управления 8, так и его прогнозируемого значения в случае пропадания входного сигнала путем обнуления коэффициентов усилителей 29, 30 и 31, а также изменением коэффициентов усилителей 32, 33 и 37в соответствии с прогнозируемыми инерционными свойствами объекта слежения и объекта управления 6, т.е. обеспечивается учет прогнозируемой инерционности изменения значений ускорения и скорости входного сигнала, а также значений входного и выходного сигналов соответственно.
Во втором варианте системы управления для второго варианта объекта управления 6 используется устройство 2, реализующее третий и четвертый варианты способа обработки сигналов.
Устройство 2, реализующее третий вариант способа обработки сигналов, работает следующим образом. Сигнал пропорциональный величине ошибки управления ε, поступающий на первый вход устройства 2, проходит через последовательно соединенные устройства 42, 46, 45, 53, 43, 54, 44, 55, сигнал с выхода которого поступает на второй вход сумматора 42. Сигнал с выхода сумматора 42 поступает через усилитель 47 на второй вход сумматора 43 и через усилитель 48 на второй вход сумматора 44. Подача сигнала с выхода интегратора 53 через усилитель 49 на второй вход сумматора 45, сигнала с выхода интегратора 54 через усилитель 50 на третий вход сумматора 43 и сигнала с выхода интегратора 55 через усилитель 51 на третий вход сумматора 44 обеспечивает учет инерционности изменения ускорения входного сигнала, а также скоростей и значений входного сигнала и команд управления соответственно. На выходе интегратора 55, являющимся выходом устройства 2, путем подачи команд управления, поступающих по второму входу устройства 2, через усилитель 52 на четвертый вход сумматора 43 и на четвертый вход сумматора 44 обеспечивается формирование как отфильтрованного значения ошибки управления ε, так и его прогнозируемого значения в случае пропадания входного сигнала путем обнуления коэффициентов усилителей 46, 47 и 48, а также изменением коэффициентов усилителей 49, 50 и 51 в соответствии с прогнозируемыми инерционными свойствами объекта слежения и объекта управления 6, т.е. обеспечивается учет инерционности изменения ускорения входного сигнала, а также скоростей и значений входного сигнала и команд управления соответственно.
Устройство 2, реализующее четвертый вариант способа обработки сигналов, работает следующим образом. Сигнал пропорциональный величине ошибки управления ε проходит через последовательно соединенные устройства 56, 62, 59, 73, 68, 60, 57, 74, 69, 61, 58, 75, 70, сигнал с выхода которого поступает на второй вход сумматора 61. Сигнал с выхода сумматора 56 поступает через усилитель 63 на второй вход сумматора 57, а через усилитель 64 на второй вход сумматора 58. Подача с выхода задержки 73 сигнала через усилитель 65 на второй вход сумматора 59 и сигнала с выхода задержки 74 через усилитель 66 на второй вход сумматора 60 обеспечивает учет инерционности изменения ускорения входного сигнала, а также скоростей входного сигнала и команд управления соответственно. При этом сигнал с выхода блока задержки 73 через усилитель 67 поступается на третий вход сумматора 61, сигнал с выхода которого поступает на второй вход сумматора 56, а подача сигнала с выхода задержки 75 через усилитель 70 на второй вход усилителя 61 обеспечивает учет инерционности изменения значений входного сигнала и команд управления. На выходе сумматора 58, являющимся выходом устройства 2, путем подачи команд управления, поступающих по второму входу устройства 2, через усилитель 71 на третий вход сумматора 60 и через усилитель 72 на четвертый вход сумматора 61 обеспечивается формирование как отфильтрованного значения ошибки управления ε, так и его прогнозируемого значения в случае пропадания входного сигнала путем обнуления коэффициентов усилителей 62, 63 и 64, а также изменением величины коэффициентов усилителей 65, 66, 70 в соответствии с инерционными свойствами объекта слежения и объекта управления 6, т.е. обеспечивает учет инерционности изменения ускорения входного сигнала, а также скоростей и значений входного сигнала и команд управления соответственно.
Инерционные свойства объекта слежения учитываются:
- для устройства 2, реализующего первый, второй, третий и четвертый варианты способа управления, ограничением динамической возможности изменения при оценке и прогнозировании входного сигнала ϕо вх (t) c помощью значения коэффициента усилителя 17, 37, 51, 70.
- для устройства 2, реализующего первый, второй, третий и четвертый варианты способа управления, ограничением динамической возможности изменения при оценке и прогнозировании скорости  входного сигнала с помощью значения коэффициентов усилителей 16, 33, 50, 66;
входного сигнала с помощью значения коэффициентов усилителей 16, 33, 50, 66;
- для устройства 2, реализующего первый, второй, третий и четвертый варианты способа управления, ограничением динамической возможности изменения при оценке и прогнозировании ускорения  входного сигнала с помощью значения коэффициентов усилителей 15, 32, 49, 65;
входного сигнала с помощью значения коэффициентов усилителей 15, 32, 49, 65;
Инерционные свойства объекта управления 6 учитываются:
- для устройства 2, реализующего первый и второй варианты способа управления, ограничением динамической возможности изменения при оценке и прогнозировании выходного сигнала ϕо вых относительно входного с помощью значения коэффициента усилителя 17, 37.
В первом и втором варианте реализации системы управления повышение помехоустойчивости достигается путем:
- формирования на выходе блока 4 сигнала, пропорционального выходным координатам объекта управления 6;
- формирования на выходе устройства 2 как отфильтрованного сигнала ошибки управления ε, так и его прогноза в случае пропадания входного сигнала (недостоверности сигнала ошибки управления);
- подачей сигнала компенсации фазового запаздывания с выхода устройства 4 на второй вход устройства обработки сигналов 2;
- определенной последовательностью соединения вновь вводимых элементов 3, 4, 10, 11, 15-18, 25-28, 32-41, 45, 49-52, 59-61, 65-75 и выполнением определенных параметрических соотношений.
Обосновать работу первого и второго варианта системы управления можно следующим образом.
При автоматическом сопровождении (отсутствии признака недостоверности сигнала ошибки управление 6 и подачи сигнала со второго входа блока переключений 5 на вход блока управления 3, формирование команд управления u осуществляется по нефильтрованной ошибке управление ε. В этом случае динамические свойства в значительной степени задается блоком 3 и передаточная функция системы управления имеет вид

где Wi - передаточная функция i-го блока.
При автоматическом сопровождении (отсутствии признака недостоверности сигнала ошибки управление ε) и подачи сигнала с первого входа блока переключений 5 на вход блока управления 3, т.е. при формировании команд управления и по отфильтрованной ошибке управление 6, передаточная функция по командам управления и в зависимости от сигналов ошибки управления 6 для первого и второго вариантов системы управления имеет вид:

где
- передаточная функция устройства обработки сигналов 2; WMО - передаточная точная функция модели объекта управления: WMO=W4 - первого варианта объекта управления 6, WMО=W4 W20 - второго варианта объекта управления 6.
Передаточная функция W2 устройства 2 обеспечивает фильтрацию ошибки управление s и минимальное фазовое запаздывание в полосе пропускания системы управления.
Передаточная функция для первого и второго вариантов системы управления имеет вид

где W6 - передаточная функция объекта управления.
При WMO=W6, т.е. обеспечении соответствия передаточной функции образовавшегося с помощью цепи внутренней обратной связи замкнутого контура передаточной функции системы управления, передаточная функция примет вид

т.е. в системе управления обеспечивается дополнительное подавление помех с помощью устройства 2 при сохранении динамических характеристик (запасов устойчивости и т.д.) системы, так как в характеристическое уравнение (знаменатель (4)) не входит W2. Это позволяет выбирать полосу пропускания устройства 2 равную полосе пропускания системы управления и обеспечивать эффективное подавление высокочастотных помех.
При автоматическом сопровождении (отсутствии признака недостоверности сигнала ошибки управление ε) и формирование команд управления u как по отфильтрованной, так и по нефильтрованной ошибке управление ε в устройстве 2 осуществляется
оценка прогнозируемого на один шаг дискретизации значения ускорения входного сигнала :
- для устройства 2, реализующего второй вариант способа обработки сигналов, на выходе блока 32,
- для устройства 2, реализующего четвертый вариант способа обработки сигналов, на выходе блока 65,
оценка прогнозируемого на один шаг дискретизации значения скорости входного сигнала  :
:
- для устройства 2, реализующего второй вариант способа обработки сигналов, на выходе блока 26,
- для устройства 2, реализующего четвертый вариант способа обработки сигналов, на выходе блока 60,
оценка прогнозируемого на один шаг дискретизации значения входного сигнала ип ϕо вх:
- для устройства 2, реализующего второй вариант способа обработки сигналов, на выходе блока 27,
оценка значения ускорения входного сигнала  :
:
- для устройства 2, реализующего первый вариант способа обработки сигналов, на выходе блока 19;
- для устройства 2, реализующего второй вариант способа обработки сигналов, на выходе блока 25,
- для устройства 2, реализующего третий вариант способа обработки сигналов, на выходе блока 53,
- для устройства 2, реализующего четвертый вариант способа обработки сигналов, на выходе блока 59,
оценка значения скорости входного сигнала  :
:
- для устройства 2, реализующего первый вариант способа обработки сигналов, на выходе блока 20;
- для устройства 2, реализующего второй вариант способа обработки сигналов, на выходе блока 23,
- для устройства 2, реализующего третий вариант способа обработки сигналов, на выходе блока 54,
- для устройства 2, реализующего четвертый вариант способа обработки сигналов, на выходе блока 57,
оценка значения входного сигнала ио:
- для устройства 2, реализующего первый вариант способа обработки сигналов, на выходе блока 21;
- для устройства 2, реализующего второй вариант способа обработки сигналов, на выходе блока 24,
и оценка отфильтрованного значения ошибки управления ивхо:
- для устройства 2, реализующего первый вариант способа обработки сигналов, на выходе блока 11;
- для устройства 2, реализующего второй вариант способа обработки сигналов, на выходе блока 28;
- для устройства 2, реализующего третий вариант способа обработки сигналов, на выходе блока 55;
- для устройства 2, реализующего четвертый вариант способа обработки сигналов, на выходе блока 58.
При появлении признака недостоверности сигнала ошибки управление в устройстве обработки сигналов 2 осуществляется отключение:
- 12, 13, 14 усилителей (первый вариант реализации способа обработки сигналов);
- 29, 30, 31 усилителей (второй вариант реализации способа обработки сигналов);
- 46, 47, 48 усилителей (третий вариант реализации способа обработки сигналов);
- 62, 63, 64 усилителей (четвертый вариант реализации способа обработки сигналов);
путем обнуления значений коэффициентов, и соответствующее изменение значений коэффициентов:
- усилителей 15, 16, 17 (первый вариант реализации способа обработки сигналов);
- усилителей 32, 33, 34 (второй вариант реализации способа обработки сигналов);
- усилителей 49, 50, 51 (третий вариант реализации способа обработки сигналов);
- усилителей 65, 66, 67 (четвертый вариант реализации способа обработки сигналов)
до величины определяемой прогнозируемыми инерционными свойствами объекта слежения и инерционными свойствами объекта управления 6, а также оценку прогнозируемого значения ускорения входного сигнала  :
:
- для устройства 2, реализующего первый вариант реализации способа обработки сигналов, на выходе блока 19;
- для устройства 2, реализующего второй вариант реализации способа обработки сигналов, на выходе блока 25;
- для устройства 2, реализующего третий вариант реализации способа обработки сигналов, на выходе блока 53;
- для устройства 2, реализующего четвертый вариант реализации способа обработки сигналов, на выходе блока 59;
оценку прогнозируемого значения скорости входного сигнала  :
:
- для устройства 2, реализующего первый вариант реализации способа обработки сигналов, на выходе блока 19;
- для устройства 2, реализующего второй вариант реализации способа обработки сигналов, на выходе блока 25;
- для устройства 2, реализующего третий вариант реализации способа обработки сигналов, на выходе блока 53;
- для устройства 2, реализующего четвертый вариант реализации способа обработки сигналов, на выходе блока 59;
и оценку прогнозируемого значения входного сигнала ип:
- для устройства 2, реализующего первый вариант способа обработки сигналов, на выходе блока 21;
- для устройства 2, реализующего второй вариант способа обработки сигналов, на выходе блока 24,
а также формирование прогнозированной ошибки управления ивхп:
- для устройства 2, реализующего первый вариант способа обработки сигналов, на выходе блока 11;
- для устройства 2, реализующего второй вариант способа обработки сигналов, на выходе блока 28;
- для устройства 2, реализующего третий вариант способа обработки сигналов, на выходе блока 55;
- для устройства 2, реализующего четвертый вариант способа обработки сигналов, на выходе блока 58,
что обеспечивает устойчивое управление объектом в условиях пропадания входного сигнала.
Анализ формул (1) - (5) показывает, что в рассматриваемой системе обеспечивается повышение помехоустойчивости и устойчивости отработки управляющих воздействий системы управления.
Установлено экспериментально, что (5) справедливо, если для отношения коэффициентов передачи элементов систему управления в полосе рабочих частот выполняется зависимость

Значения коэффициентов из диапазона 0,7…1,3 в (6) определяются при настройке каждого конкретного образца системы с целью наиболее полной реализации условия (5). Это обстоятельство вызвано отличием параметров конкретного образца системы от номинала.
Таким образом, предлагаемые способ управления объектом, система управления (варианты), способ обработки сигналов (варианты) обеспечивают повышение помехоустойчивости системы управления и повышение устойчивости и точности системы управления при отработке высоко динамических управляющих воздействий за счет динамического формирования команд с помощью блока управления 6 и компенсации фазовой задержки устройства обработки сигналов сигнала ошибки управления путем формирования внутренней обратной связи с передаточной функцией образовавшегося замкнутого контура в соответствии с передаточной функции системы управления объектом, а также учете инерционных свойств объекта слежения и объекта управления при автоматическом сопровождении и при переходе на сопровождение по прогнозируемым координатам.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ (ВАРИАНТЫ) | 2016 |
|
RU2628757C1 |
| СПОСОБ УПРАВЛЕНИЯ ОБЪЕКТОМ (ВАРИАНТЫ) И СИСТЕМА (ВАРИАНТЫ) ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2209443C2 |
| СИСТЕМА УПРАВЛЕНИЯ ИНЕРЦИОННЫМ ОБЪЕКТОМ (ВАРИАНТЫ) | 1999 |
|
RU2169938C2 |
| СПОСОБ УПРАВЛЕНИЯ ИНЕРЦИОННЫМ ПРИВОДОМ АНТЕННЫ | 2012 |
|
RU2518685C1 |
| СПОСОБ СОПРОВОЖДЕНИЯ ОБЪЕКТА И СПОСОБ ФОРМИРОВАНИЯ СИГНАЛА УПРАВЛЕНИЯ ПОЛОЖЕНИЕМ ЛУЧА ПРИЕМНО-ПЕРЕДАЮЩЕГО АНТЕННОГО УСТРОЙСТВА СИСТЕМЫ СОПРОВОЖДЕНИЯ ОБЪЕКТА | 2011 |
|
RU2476904C1 |
| Устройство управления весовым порционным дозатором | 1981 |
|
SU1008625A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ КУРСОМ СУДНА И СИСТЕМА АВТОРУЛЕВОГО ДЛЯ РЕАЛИЗАЦИИ СПОСОБА | 2004 |
|
RU2282884C2 |
| Система автоматического управления пространственным разворотом объекта | 1989 |
|
SU1679467A1 |
| Адаптивная система управления | 1986 |
|
SU1399700A1 |
| СПОСОБ КОМАНДНОГО ТЕЛЕУПРАВЛЕНИЯ РАКЕТОЙ | 2004 |
|
RU2280227C1 |
Изобретение относится к области оптико-электронных систем управления, предназначенных преимущественно для автоматического сопровождения подвижных объектов с перемещающегося основания, и может быть использовано в образцах техники, работающих в условиях воздействия помех и пропадании информационных сигналов, а также в установках для научных исследований. Способ управления объектом, включающий выделение сигнала ошибки управления, формирование команды управления объектом, формирование признака недостоверности сигнала ошибки управления, при отсутствии этого признака производится фильтрация сигнала ошибки управления, формирование сигнала компенсации фазового запаздывания фильтрации сигнала ошибки управления, а при наличии признака недостоверности сигнала ошибки управления проводится прогнозирование сигнала ошибки управления и формирование по ней команд управления. При этом передаточная функция образовавшегося с помощью цепи внутренней обратной связи замкнутого контура выбирается в соответствии с передаточной функцией системы управления объектом. Причем в процессе управления формируется обратная связь по выходным координатам или по командам управления. При отсутствии признака недостоверности сигнала ошибки управления фильтрация сигнала ошибки управления осуществляется с учетом инерционных свойств входного сигнала и объекта управления, а управление производится по неотфильтрованному или отфильтрованному сигналу ошибки управления. При наличии признака недостоверности сигнала ошибки прогнозирование сигнала ошибки управления производится с учетом сигнала по цепи внутренней обратной связи и инерционных свойств входного сигнала и объекта управления. Технический результат заключается в повышении помехоустойчивости и повышении устойчивости и точности отработки высоко динамических управляющих воздействий в условиях помех измерения, прерывании оптической связи и в условиях возмущений, вызванных работой комплекса, увеличении допустимого времени нахождения в инерционном режиме, снижении вероятности срыва сопровождения объекта, снижении вероятности ложного захвата объекта. 7 н. и 4 з.п. ф-лы, 6 ил.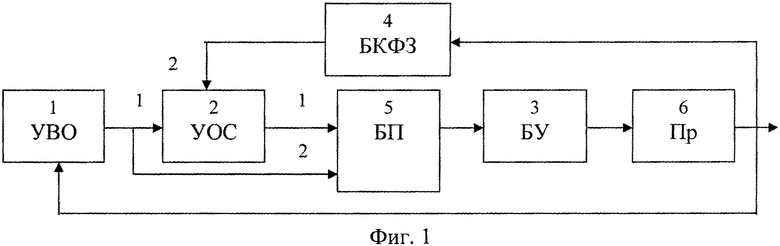
1. Способ управления объектом, включающий выделение сигнала ошибки управления, формирование команды управления объектом, формирование признака недостоверности сигнала ошибки управления, при отсутствии этого признака производится фильтрация сигнала ошибки управления, формирование сигнала компенсации фазового запаздывания фильтрации сигнала ошибки управления, а при наличии признака недостоверности сигнала ошибки управления проводится прогнозирование сигнала ошибки управления и формирование по ней команд управления, при этом передаточная функция образовавшегося с помощью цепи внутренней обратной связи замкнутого контура выбирается в соответствии с передаточной функцией системы управления объектом, отличающийся тем, что в процессе управления формируется обратная связь по выходным координатам или по командам управления, при отсутствии признака недостоверности сигнала ошибки управления фильтрация сигнала ошибки управления осуществляется с учетом инерционных свойств входного сигнала и объекта управления, а управление производится по неотфильтрованному или отфильтрованному сигналу ошибки управления, при наличии признака недостоверности сигнала ошибки прогнозирование сигнала ошибки управления производится с учетом сигнала по цепи внутренней обратной связи и инерционных свойств входного сигнала и объекта управления.
2. Система управления, включающая последовательно соединенные объект управления, устройство выделения ошибки, устройство обработки сигналов и блок переключения, второй вход которого соединен с выходом устройства выделения ошибки, отличающаяся тем, что система снабжена блоком компенсации фазового запаздывания, выход которого соединен со вторым входом устройства обработки сигналов, а вход с выходом объекта управления, и блоком управления, вход которого соединен с выходом блока переключения, а выход со входом объекта управления.
3. Система управления по п. 2, отличающаяся тем, что объект управления представляет собой исполнительный привод, вход которого является входом объекта управления, а выход - выходом объекта управления.
4. Система управления по п. 2, отличающаяся тем, что объект управления представляет собой последовательно соединенные гироскопический датчик угла, вход которого является входом объекта управления, и исполнительный привод, выход которого является выходом объекта управления.
5. Система управления, включающая последовательно соединенные объект управления, устройство выделения ошибки, устройство обработки сигналов и блок переключения, второй вход которого соединен с выходом устройства выделения ошибки, отличающаяся тем, что система снабжена блоком компенсации фазового запаздывания, выход которого соединен со вторым входом устройства обработки сигналов, и блоком управления, вход которого соединен с выходом блока переключения, а выход с входами объекта управления и блока компенсации фазового запаздывания.
6. Система управления по п. 5, отличающаяся тем, что объект управления представляет собой исполнительный привод, вход которого является входом объекта управления, а выход - выходом объекта управления.
7. Система управления по п. 5, отличающаяся тем, что объект управления представляет собой последовательно соединенные гироскопический датчик угла, вход которого является входом объекта управления, и исполнительный привод, выход которого является выходом объекта управления.
8. Способ обработки сигналов, включающий измерение значений сигнала ошибки управления uвх, формирование признака недостоверности сигнала ошибки управления, при отсутствии этого признака осуществляется фильтрация измеренных значений сигнала ошибки управления, формирование разницы между измеренным uвх и отфильтрованным uвхо значениями ошибки управления, в соответствии с полученной разницей производится оценка значения входного сигнала uo, оценка значения скорости входного сигнала  , оценка значения ускорения входного сигнала
, оценка значения ускорения входного сигнала  , а при наличии признака недостоверности сигнала ошибки управления осуществляется формирование прогнозируемого значения сигнала ошибки управления uвхn, оценки прогнозируемого значения входного сигнала un, оценки прогнозируемого значения скорости входного сигнала
, а при наличии признака недостоверности сигнала ошибки управления осуществляется формирование прогнозируемого значения сигнала ошибки управления uвхn, оценки прогнозируемого значения входного сигнала un, оценки прогнозируемого значения скорости входного сигнала  , оценки прогнозируемого значения ускорения входного сигнала
, оценки прогнозируемого значения ускорения входного сигнала  , отличающийся тем, что осуществляется измерение значений выходного сигнала uвых объекта управления, при отсутствии признака недостоверности сигнала ошибки управления осуществляется оценка значения входного сигнала uo с учетом инерционности изменения входного сигнала, оценка значения скорости входного сигнала
, отличающийся тем, что осуществляется измерение значений выходного сигнала uвых объекта управления, при отсутствии признака недостоверности сигнала ошибки управления осуществляется оценка значения входного сигнала uo с учетом инерционности изменения входного сигнала, оценка значения скорости входного сигнала  с учетом инерционности изменения скорости входного сигнала, оценка значения ускорения входного сигнала
с учетом инерционности изменения скорости входного сигнала, оценка значения ускорения входного сигнала  с учетом инерционности изменения ускорения входного сигнала, при этом реализуются следующие зависимости:
с учетом инерционности изменения ускорения входного сигнала, при этом реализуются следующие зависимости:



где  - коэффициент, учитывающий инерционность изменения входного сигнала,
- коэффициент, учитывающий инерционность изменения входного сигнала,
 - коэффициент, учитывающий инерционность изменения скорости входного сигнала,
- коэффициент, учитывающий инерционность изменения скорости входного сигнала,
 - коэффициент, учитывающий инерционность изменения ускорения входного сигнала,
- коэффициент, учитывающий инерционность изменения ускорения входного сигнала,
k1n - коэффициент, учитывающий влияние скорости входного сигнала,
k2n - коэффициент, учитывающий влияние ускорения входного сигнала,
k3n - коэффициент, учитывающий влияние выходного сигнала,
kкфз - коэффициент компенсации фазового запаздывания,
k1 - коэффициент, учитывающий быстроту оценки входного сигнала,
k2 - коэффициент, учитывающий быстроту оценки скорости входного сигнала,
k3 - коэффициент, учитывающий быстроту оценки ускорения входного сигнала,
при наличии признака недостоверности сигнала ошибки управления осуществляется оценка прогнозируемого значения входного сигнала un с учетом прогнозируемой инерционности изменения входного сигнала, оценка прогнозируемого значения скорости входного сигнала  с учетом прогнозируемой инерционности изменения скорости входного сигнала, оценка прогнозируемого значения ускорения входного сигнала
с учетом прогнозируемой инерционности изменения скорости входного сигнала, оценка прогнозируемого значения ускорения входного сигнала  с учетом прогнозируемой инерционности изменения ускорения входного сигнала, при этом реализуются следующие зависимости:
с учетом прогнозируемой инерционности изменения ускорения входного сигнала, при этом реализуются следующие зависимости:


где  - коэффициент, учитывающий прогнозируемую инерционность изменения входного сигнала,
- коэффициент, учитывающий прогнозируемую инерционность изменения входного сигнала,
 - коэффициент, учитывающий прогнозируемую инерционность изменения скорости входного сигнала,
- коэффициент, учитывающий прогнозируемую инерционность изменения скорости входного сигнала,
 - коэффициент, учитывающий прогнозируемую инерционность изменения ускорения входного сигнала.
- коэффициент, учитывающий прогнозируемую инерционность изменения ускорения входного сигнала.
9. Способ обработки сигналов, включающий измерение значений сигнала ошибки управления uвх, формирование признака недостоверности сигнала ошибки управления, при отсутствии этого признака осуществляется фильтрация измеренных значений сигнала ошибки управления, формирование разницы между измеренным uвх и отфильтрованным uвхо значениями ошибки управления, в соответствии с полученной разницей производится оценка значения входного сигнала uo, оценка значения скорости входного сигнала  , оценка значения ускорения входного сигнала
, оценка значения ускорения входного сигнала  , а при наличии признака недостоверности сигнала ошибки управления осуществляется формирование прогнозируемого значения сигнала ошибки управления uвхn, оценки прогнозируемого значения входного сигнала un, оценки прогнозируемого значения скорости входного сигнала
, а при наличии признака недостоверности сигнала ошибки управления осуществляется формирование прогнозируемого значения сигнала ошибки управления uвхn, оценки прогнозируемого значения входного сигнала un, оценки прогнозируемого значения скорости входного сигнала  , оценки прогнозируемого значения ускорения входного сигнала
, оценки прогнозируемого значения ускорения входного сигнала  , отличающийся тем, что осуществляется измерение значений выходного сигнала uвых объекта управления, при отсутствии признака недостоверности сигнала ошибки управления осуществляется оценка прогнозируемого значения входного сигнала un с учетом инерционности изменения входного сигнала, оценка прогнозируемого значения скорости входного сигнала
, отличающийся тем, что осуществляется измерение значений выходного сигнала uвых объекта управления, при отсутствии признака недостоверности сигнала ошибки управления осуществляется оценка прогнозируемого значения входного сигнала un с учетом инерционности изменения входного сигнала, оценка прогнозируемого значения скорости входного сигнала  с учетом инерционности изменения скорости входного сигнала, оценка прогнозируемого значения ускорения входного сигнала с учетом инерционности изменения ускорения входного сигнала, оценка значения входного сигнала uo с учетом оценки прогнозируемого значения входного сигнала, оценка значения скорости входного сигнала
с учетом инерционности изменения скорости входного сигнала, оценка прогнозируемого значения ускорения входного сигнала с учетом инерционности изменения ускорения входного сигнала, оценка значения входного сигнала uo с учетом оценки прогнозируемого значения входного сигнала, оценка значения скорости входного сигнала  с учетом оценки прогнозируемого значения скорости входного сигнала, оценка значения ускорения входного сигнала
с учетом оценки прогнозируемого значения скорости входного сигнала, оценка значения ускорения входного сигнала  с учетом оценки прогнозируемого значения ускорения входного сигнала, при этом реализуются следующие зависимости:
с учетом оценки прогнозируемого значения ускорения входного сигнала, при этом реализуются следующие зависимости:







где  - коэффициент, учитывающий инерционность изменения входного сигнала,
- коэффициент, учитывающий инерционность изменения входного сигнала,
 - коэффициент, учитывающий инерционность изменения скорости входного сигнала,
- коэффициент, учитывающий инерционность изменения скорости входного сигнала,
 - коэффициент, учитывающий инерционность изменения ускорения входного сигнала,
- коэффициент, учитывающий инерционность изменения ускорения входного сигнала,
k1n - коэффициент, учитывающий влияние скорости входного сигнала,
k2n, k3n - коэффициенты, учитывающие влияние ускорения входного сигнала,
k4n - коэффициент, учитывающий влияние выходного сигнала,
kкфз - коэффициент компенсации фазового запаздывания,
k1 - коэффициент, учитывающий быстроту оценки входного сигнала,
k2 - коэффициент, учитывающий быстроту оценки скорости входного сигнала,
k3 - коэффициент, учитывающий быстроту оценки ускорения входного сигнала,
при наличии признака недостоверности сигнала ошибки управления осуществляется оценка прогнозируемого значения входного сигнала un с учетом прогнозируемой инерционности изменения входного сигнала, оценка прогнозируемого значения скорости входного сигнала  с учетом прогнозируемой инерционности изменения скорости входного сигнала, оценка прогнозируемого значения ускорения входного сигнала
с учетом прогнозируемой инерционности изменения скорости входного сигнала, оценка прогнозируемого значения ускорения входного сигнала  с учетом прогнозируемой инерционности изменения ускорения входного сигнала, при этом реализуются следующие зависимости:
с учетом прогнозируемой инерционности изменения ускорения входного сигнала, при этом реализуются следующие зависимости:




где  - коэффициент, учитывающий прогнозируемую инерционность изменения входного сигнала,
- коэффициент, учитывающий прогнозируемую инерционность изменения входного сигнала,
 - коэффициент, учитывающий прогнозируемую инерционность изменения скорости входного сигнала,
- коэффициент, учитывающий прогнозируемую инерционность изменения скорости входного сигнала,
 - коэффициент, учитывающий прогнозируемую инерционность изменения ускорения входного сигнала.
- коэффициент, учитывающий прогнозируемую инерционность изменения ускорения входного сигнала.
10. Способ обработки сигналов, включающий измерение значений сигнала ошибки управления uвх и команды управления uупр, формирование признака недостоверности сигнала ошибки управления, при отсутствии этого признака осуществляется фильтрация измеренных значений сигнала ошибки управления, формирование разницы между измеренным uвх и отфильтрованным uвхо значениями ошибки управления, в соответствии с полученной разницей производится оценка значения скорости входного сигнала  , оценка значения ускорения входного сигнала
, оценка значения ускорения входного сигнала  , а при наличии признака недостоверности сигнала ошибки управления осуществляется формирование прогнозируемого значения сигнала ошибки управления uвхn, оценки прогнозируемого значения скорости входного сигнала
, а при наличии признака недостоверности сигнала ошибки управления осуществляется формирование прогнозируемого значения сигнала ошибки управления uвхn, оценки прогнозируемого значения скорости входного сигнала  , оценки прогнозируемого значения ускорения входного сигнала
, оценки прогнозируемого значения ускорения входного сигнала  , отличающийся тем, что при отсутствии признака недостоверности сигнала ошибки управления осуществляется оценка отфильтрованного значения ошибки управления uвхо с учетом инерционности изменения входного и выходного сигналов, оценка значения скорости входного сигнала
, отличающийся тем, что при отсутствии признака недостоверности сигнала ошибки управления осуществляется оценка отфильтрованного значения ошибки управления uвхо с учетом инерционности изменения входного и выходного сигналов, оценка значения скорости входного сигнала  с учетом инерционности изменения скорости входного сигнала, оценка значения ускорения входного сигнала
с учетом инерционности изменения скорости входного сигнала, оценка значения ускорения входного сигнала  с учетом инерционности изменения ускорения входного сигнала, при этом реализуются следующие зависимости:
с учетом инерционности изменения ускорения входного сигнала, при этом реализуются следующие зависимости:



где  - коэффициент, учитывающий инерционность изменения входного и выходного сигналов,
- коэффициент, учитывающий инерционность изменения входного и выходного сигналов,
 - коэффициент, учитывающий инерционность изменения скорости входного сигнала,
- коэффициент, учитывающий инерционность изменения скорости входного сигнала,
 - коэффициент, учитывающий инерционность изменения ускорения входного сигнала,
- коэффициент, учитывающий инерционность изменения ускорения входного сигнала,
k1n - коэффициент, учитывающий влияние скорости входного сигнала,
k2n - коэффициент, учитывающий влияние ускорения входного сигнала,
k3n, k4n - коэффициенты, учитывающие влияние команды управления,
kкфз - коэффициент компенсации фазового запаздывания,
k1 - коэффициент, учитывающий быстроту оценки входного сигнала,
k2 - коэффициент, учитывающий быстроту оценки скорости входного сигнала,
k3 - коэффициент, учитывающий быстроту оценки ускорения входного сигнала,
при наличии признака недостоверности сигнала ошибки управления осуществляется оценка прогнозируемого значения сигнала ошибки управления uвхn с учетом прогнозируемой инерционности изменения входного и выходного сигналов, оценка прогнозируемого значения скорости входного сигнала  с учетом прогнозируемой инерционности изменения скорости входного сигнала, оценка прогнозируемого значения ускорения входного сигнала
с учетом прогнозируемой инерционности изменения скорости входного сигнала, оценка прогнозируемого значения ускорения входного сигнала  с учетом прогнозируемой инерционности изменения ускорения входного сигнала, при этом реализуются следующие зависимости:
с учетом прогнозируемой инерционности изменения ускорения входного сигнала, при этом реализуются следующие зависимости:


где  - коэффициент, учитывающий прогнозируемую инерционность изменения входного и выходного сигналов,
- коэффициент, учитывающий прогнозируемую инерционность изменения входного и выходного сигналов,
 - коэффициент, учитывающий прогнозируемую инерционность изменения скорости входного сигнала,
- коэффициент, учитывающий прогнозируемую инерционность изменения скорости входного сигнала,
 - коэффициент, учитывающий прогнозируемую инерционность изменения ускорения входного сигнала.
- коэффициент, учитывающий прогнозируемую инерционность изменения ускорения входного сигнала.
11. Способ обработки сигналов, включающий измерение значений сигнала ошибки управления uвх и команд управления uупр, формирование признака недостоверности сигнала ошибки управления, при отсутствии этого признака осуществляется фильтрация измеренных значений сигнала ошибки управления, формирование разницы между измеренным uвх и отфильтрованным uвхо значениями ошибки управления, в соответствии с полученной разницей производится оценка значения скорости входного сигнала  , оценка значения ускорения входного сигнала
, оценка значения ускорения входного сигнала  , а при наличии признака недостоверности сигнала ошибки управления осуществляется формирование прогнозируемого значения сигнала ошибки управления uвхn, оценки прогнозируемого значения скорости входного сигнала
, а при наличии признака недостоверности сигнала ошибки управления осуществляется формирование прогнозируемого значения сигнала ошибки управления uвхn, оценки прогнозируемого значения скорости входного сигнала  , оценки прогнозируемого значения ускорения входного сигнала
, оценки прогнозируемого значения ускорения входного сигнала  , отличающийся тем, что при отсутствии признака недостоверности сигнала ошибки управления осуществляется оценка прогнозируемого значения сигнала ошибки управления uвхn с учетом инерционности изменения входного и выходного сигналов, оценка прогнозируемого значения скорости входного сигнала
, отличающийся тем, что при отсутствии признака недостоверности сигнала ошибки управления осуществляется оценка прогнозируемого значения сигнала ошибки управления uвхn с учетом инерционности изменения входного и выходного сигналов, оценка прогнозируемого значения скорости входного сигнала  с учетом инерционности изменения скорости входного сигнала, оценка прогнозируемого значения ускорения входного сигнала с учетом инерционности изменения ускорения входного сигнала, оценка отфильтрованного значения сигнала ошибки управления uвхо с учетом оценки прогнозируемого значения сигнала ошибки управления, оценка значения скорости входного сигнала
с учетом инерционности изменения скорости входного сигнала, оценка прогнозируемого значения ускорения входного сигнала с учетом инерционности изменения ускорения входного сигнала, оценка отфильтрованного значения сигнала ошибки управления uвхо с учетом оценки прогнозируемого значения сигнала ошибки управления, оценка значения скорости входного сигнала  с учетом оценки прогнозируемого значения скорости входного сигнала, оценка значения ускорения входного сигнала
с учетом оценки прогнозируемого значения скорости входного сигнала, оценка значения ускорения входного сигнала  с учетом оценки прогнозируемого значения ускорения входного сигнала, при этом
с учетом оценки прогнозируемого значения ускорения входного сигнала, при этом






где  - коэффициент, учитывающий инерционность изменения входного и выходного сигналов,
- коэффициент, учитывающий инерционность изменения входного и выходного сигналов,
 - коэффициент, учитывающий инерционность изменения скорости входного сигнала,
- коэффициент, учитывающий инерционность изменения скорости входного сигнала,
 - коэффициент, учитывающий инерционность изменения ускорения входного сигнала,
- коэффициент, учитывающий инерционность изменения ускорения входного сигнала,
k1n - коэффициент, учитывающий влияние скорости входного сигнала,
k2n, k3n - коэффициенты, учитывающие влияние ускорения входного сигнала,
k4n, k5n - коэффициенты, учитывающие влияние команды управления,
kкфз - коэффициент компенсации фазового запаздывания,
k1 - коэффициент, учитывающий быстроту оценки входного сигнала,
k2 - коэффициент, учитывающий быстроту оценки скорости входного сигнала,
k3 - коэффициент, учитывающий быстроту оценки ускорения входного сигнала,
при наличии признака недостоверности сигнала ошибки управления осуществляется оценка прогнозируемого значения сигнала ошибки управления uвхn с учетом прогнозируемой инерционности изменения входного и выходного сигналов, оценка значения скорости входного сигнала  с учетом прогнозируемой инерционности изменения скорости входного сигнала, оценка значения ускорения входного сигнала
с учетом прогнозируемой инерционности изменения скорости входного сигнала, оценка значения ускорения входного сигнала  с учетом прогнозируемой инерционности изменения ускорения входного сигнала, при этом
с учетом прогнозируемой инерционности изменения ускорения входного сигнала, при этом



где  - коэффициент, учитывающий прогнозируемую инерционность изменения и выходного сигналов,
- коэффициент, учитывающий прогнозируемую инерционность изменения и выходного сигналов,
 - коэффициент, учитывающий прогнозируемую инерционность изменения скорости входного сигнала,
- коэффициент, учитывающий прогнозируемую инерционность изменения скорости входного сигнала,
 - коэффициент, учитывающий прогнозируемую инерционность изменения ускорения входного сигнала.
- коэффициент, учитывающий прогнозируемую инерционность изменения ускорения входного сигнала.
| ОПТИКО-ЭЛЕКТРОННАЯ СИСТЕМА СОПРОВОЖДЕНИЯ | 2000 |
|
RU2191407C2 |
| СПОСОБ УПРАВЛЕНИЯ ОБЪЕКТОМ (ВАРИАНТЫ), СИСТЕМА УПРАВЛЕНИЯ (ВАРИАНТЫ), УСТРОЙСТВО ОБРАБОТКИ СИГНАЛОВ И БЛОК ПОВЫШЕНИЯ АСТАТИЗМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2006 |
|
RU2318234C9 |
| US 3906196 A1, 16.09.1975 | |||
| СПОСОБ ОПРЕДЕЛЕНИЯ ФАЗОВОЙ СВЯЗИ КАНАЛОВ И БЛОК ДЛЯ ЕГО РЕАЛИЗАЦИИ (ВАРИАНТЫ), ДВУМЕРНЫЙ СПОСОБ УПРАВЛЕНИЯ И ДВУМЕРНАЯ СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2002 |
|
RU2236080C2 |

