Изобретение относится к радиолокации и может быть применено в системах воздушно-космической обороны, для контроля воздушно-космической обстановки, а также для управления процессом наведения и перехвата боеголовок баллистических ракет, орбитальных боевых блоков и других гиперзвуковых и высотных целей в верхних слоях атмосферы и в ближнем космосе.
Перехват воздушно космических целей требует большой избыточности числа противоракет по сравнению с возможным числом боеголовок при массированной атаке. Частичный перехват боеголовок не решает задачи воздушно-космической обороны, т.к. даже одна пропущенная боеголовка способна уничтожить целый город. Обеспечить избыточность числа противоракет можно, если сделать противоракеты простыми и малоразмерными, а следовательно, достаточно дешевыми в массовом производстве. Существующие технические решения позволяют сделать космическую противоракету со стартовой массой около двухсот килограмм. При этом, для достижения необходимых для перехвата скоростей до восьми и более километров в секунду и высот в сотни и тысячи километров, масса последней ступени противоракеты должна быть 20-25 раз меньше стартовой, т.е. около восьми килограмм. Чтобы поразить боеголовку массой около четырех килограмм, которые можно разместить в последней ступени такой противоракеты, требуется обеспечить промах не более нескольких метров, применив при этом боевую часть направленного кинетического действия.
Однако на таком перехватчике не остается места для размещения радиолокационной головки самонаведения (ГСН), требующей антенны диаметром в несколько длин волны. Применение оптической ГСН возможно, но конструктивно сложно. В частности, из за малого теплового излучения головной части баллистической ракеты и ее боеголовок на высоте более 80 километров. Более приемлемым по простоте решением могло бы быть применение командного дистанционного наведения противоракеты при радиолокационном контроле ее положения относительно цели с земли.
Но при этом возникает необходимость высокого пространственного радиолокационного разрешения нескольких элементов, расположенных между собой на сравнительно малых расстояниях (сотни метров) при расстояниях до радиолокатора, составляющих сотни километров. Эта задача осложняется также возможностью разделения цели на множество элементов, включая ложные цели. При этом необходимо предусмотреть возможность перехвата на более ранней стадии полета, чтобы было время на групповой запуск дополнительных противоракет. Также требуется производить классификацию элементов и распределение их между противоракетами. Погрешность измерения положения противоракет относительно элементов цели должна составлять не более десяти метров, а на этапе управления подрывом боевой части направленного действия - не более трех пяти метров.
Наибольшей точностью измерения координат при больших дальностях обладают многопозиционные системы радиолокации, в которых координаты элементов цели определяются путем измерения времени прохождения радиосигнала от радиопередатчика к двум и более разнесенным относительно передатчика и между собой приемникам, (см., например, монографию: ЧЕРНЯК В.С. «Многопозиционная радиолокация», М., Изд. «Радио и связь» 1993 г.). При этом в случае, если цель одноэлементная, то нет необходимости использовать узкую диаграмму направленности антенн приемников и передатчика. Можно использовать чисто дальнометрические измерения, точность которых на порядок (и более) выше по сравнению использованием измерений углов - особенно при больших расстояниях до цели. Точность определения всех трех координат одноэлементной цели при этом почти не зависит от расстояния и определяется главным образом точностью измерения времени задержки сигналов в каналах, проходящих через точку расположения цели. Даже при расстояниях до цели в тысячи километров, погрешность дальнометрического измерения координат элемента цели может быть менее одного метра, что подтверждается практикой использования систем глобального спутникового радиопозиционирования.
Однако, если цель многоэлементная, то, из-за большой дальности, в зону пересечения главных лепестков ДН передающей и приемной антенн может попадать несколько элементов цели, если расстояние между последними не велико. Так что, на приемной позиции трудно или невозможно определить - к какой цели относится тот или другой импульс. Импульсы приходят в каждый приемник с разными задержками, зависящими от взаимного расположения различных элементов цели в пространстве. Возникает проблема так называемой межпозиционной идентификации. В известном способе многопозиционной радиолокации она решается, как и в однопозиционной радиолокации, с применением достаточно малой угловой ширины диаграммы ДН главного лепестка приемных, а также часто и передающей, антенн. В этих условиях, указанную межпозиционную идентификацию приходится производить с использованием анализа амплитудных соотношений сигналов, а также дополнительной информации, например известной скорости или ускорения различных элементов цели, различий эффективной площади рассеяния (ЭПР) разных элементов цели, и других дополнительных признаков, имеющих часто недостоверный - вероятностный характер (см., например: Гл. 15, П 15.4 на стр. 392-:-400 вышеуказанной монографии).
И хотя все наблюдаемые в природе физические процессы имеют, как мы знаем, лишь вероятностный характер, для выше охарактеризованных применений, т.е. для дистанционного командного управления процессом наведения и перехвата боеголовок на больших высотах, имеющиеся вероятностности радиолокационного определения координат многоэлементной цели слишком далеки от достоверности. И связано это именно с отсутствием надежного метода межпозиционной идентификации данных, получаемых на приемных позициях. Для повышения достоверности данных приходится применять очень малые углы ДН антенн, что приводит к большим размерам антенн, составляющим несколько метров. При применении узконаправленных антенн затрудняется процесс сканирования больших объемов пространства при необходимости сведения множества лучей в одну точку, увеличиваются необходимые размеры антенн, что затрудняет их размещение на автомобилях, плав, средствах и т.п.
Следует заметить, что высокая направленность передатчика и приемников в многопозиционной радиолокации, т.е. чрезмерное сужение ДН, в принципе не является необходимым и применяется только для того, чтобы уменьшить влияние преднамеренных помех. Достигается это путем направления главного луча диаграммы направленности всех антенн в небо, т.е. по направлениям, где маловероятно появление постановщиков помех.
Таким образом, одной из проблем применения многопозиционной радиолокации в противоракетной обороне является проблема повышения достоверности межпозиционной идентификации радиолокационных данных на больших дальностях расположения цели от радиолокационной инфраструктуры, базирующейся, по необходимости, на поверхности земли или воды, и без необходимости сужения при этом ДН применяемых антенн. Решению этой проблемы и посвящено предлагаемое изобретение.
Предлагается способ активной многопозиционной радиолокации многоэлементной цели, состоящий в излучении передатчиком, в определенный момент времени, импульса и в приеме суммарного рассеянного импульса от множества элементов цели на два, разнесенные относительно передатчика и между собой, приемника с последующим установлением соответствия, полученного на каждом из двух приемников множества, задержанных на разное время, импульсов, элементам цели. Цель изобретения достигается тем, что соответствие полученных на двух приемных позициях времен задержек импульсов соответствующим элементам многоэлементной цели определяется путем вычисления координат цели для всех сочетаний импульсов, взятых по одному с каждого из двух приемников, с последующей проверкой равенства полученных координат координатам, вычисленным при замене сигнала одного из вышеуказанных приемников на сигнал с дополнительного - третьего приемника, разнесенного относительно двух указанных приемников и относительно передатчика. Таким образом, необходимая для указанной идентификации данных избыточность информации создается путем введения дополнительной - третьей позиции приема. Т.е. имеется возможность получения координат элементов цели с использованием альтернативной приемной базы. Любое изменение конфигурации локационной базы, состоящей из двух приемников и одного передатчика, должно оставлять неизменными получаемые значения координат элемента цели. Т.е. процесс идентификации в предлагаемом способе производится путем варьирования пространственной конфигурации базы расположения приемников и передатчика. А поскольку цель движется, то возможность варьирования конфигурации путем перемещения приемников или передатчика отпадает. Поэтому и приходится вводить третий приемник, чтобы производить локацию с двух альтернативных приемных баз одновременно.
При этом устраняется всякая неоднозначность идентификации данных, независимо от ширины ДН антенн и от числа одновременно попадающих в ДН антенн элементов цели. Увеличивается только количество сочетаний задержек импульсов, взятых по одной с каждой из двух позиций, которое растет с увеличением числа элементов цели, попадающих одновременно в ДН антенн, квадратично. Однако обработка такой информации вполне укладывается в возможности современных средств цифровой обработки.
Изобретение поясняется нижеследующим детальным описанием примера выполнения и тремя фигурами.
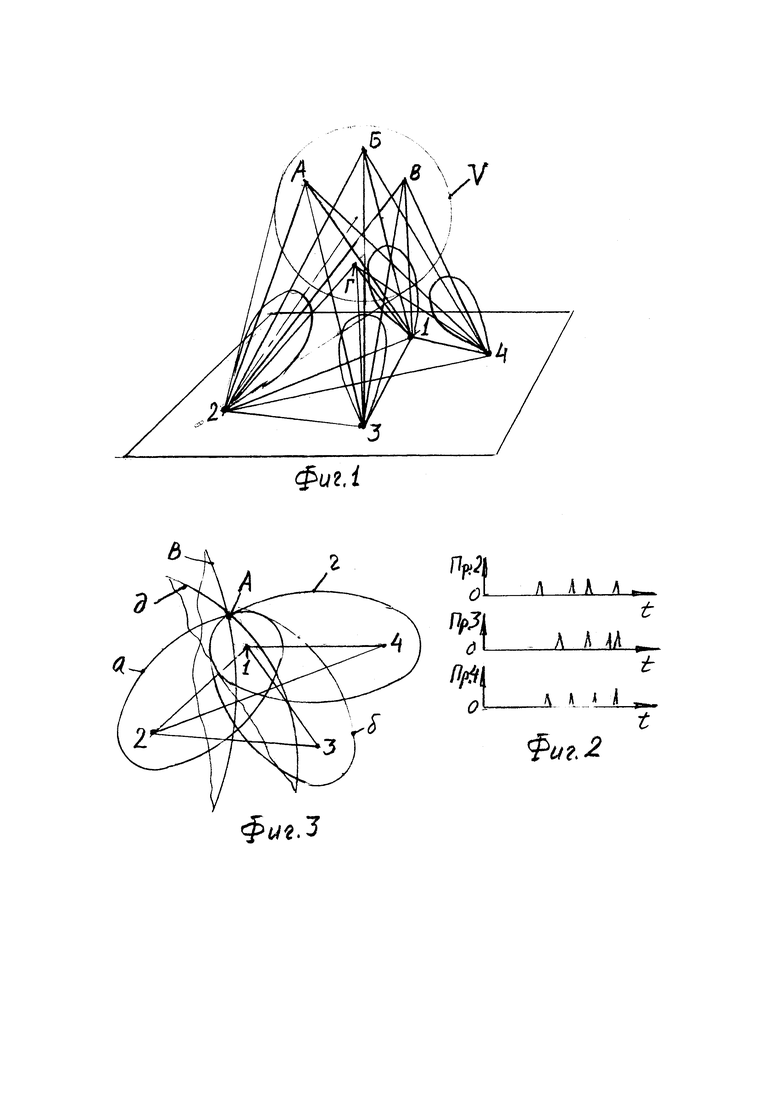
На фиг. 1 изображен пример конфигурации многопозиционной системы радиолокации, пригодной для осуществления предлагаемого способа.
Обозначение позиций на фиг. 1:
1 - позиция расположения передатчика,
2, 3 и 4 - позиции расположения трех приемников,
А, Б, В, Г - текущее расположение элементов цели.
Овалами изображены направления главных лепестков диаграмм направленности (ДН) антенн передатчика и приемников, оси которых пересекаются в центре текущей зоны наблюдения пространства.
На фиг. 2 изображены совмещенные по времени графики уровня выходного сигнала от времени на трех приемниках: Пр. 2(t); Пр. 3(t); Пр. 4(t).
На фиг. 3 проиллюстрирован процесс вычисления координат элемента цели по двум суммарным и одной разностной задержкам сигнала (т.е. по методу взаимного пересечения двух эллипсоидов «а» и «б» вращения и одного гиперболоида «в» вращения).
Угловая ширина лепестков ДН передающей и всех приемных антенн такова, что зона их пересечения охватывает некоторый объем V пространства, в котором может разместиться некоторое количество элементов цели. В рассматриваемом примере мы имеем четыре элемента цели. При этом приемные и передающая позиции расположены по сторонам треугольника произвольной конфигурации, стороны которого соизмеримы со средней высотой, на которой могут располагаться цели.
Передатчик 1 излучает достаточно короткий радиоимпульс, который позволяет точно сопоставить его с определенным моментом времени. Момент времени излучения можно отсчитывать от времени окончания импульса. Это позволяет применять достаточно длинные импульсы, сформированные широкополосным шумоподобным сигналом, детектируемым на приемной стороне путем интегральной свертки его с сигналом синхронного детектора, изменяющемуся по закону, совпадающему с законом квазишумовой модуляции передатчика. Накапливая таким образом на выходе приемника сигнал, преобладающий над уровнем шумов, некогерентных к функции применяемой шумоподобной модуляции передатчика, можно получить преобладание сигнала над некогерентным шумом, создаваемым, в частности, и средствами постановки помех, установленных на самих элементах цели.
Предлагаемый способ активной многопозиционной радиолокации состоит в следующем.
В результате излучения передатчиком 1 одного импульса, на выходе каждого из трех приемников 2, 3, 4 мы получаем четыре дискретных импульса отметки времени приема излучения передатчика, рассеянного четырьмя соответствующими элементами А, Б, В, Г цели (см. фиг. 2), отражающие задержку времени при распространении через точки расположения элементов А, Б, В, Г цели относительно момента времени излучения одного импульса передатчиком 1. Однако неизвестно, какой из четырех импульсов на каждой позиции какому из элементов А, Б, В, Г соответствует. Чтобы определить это производят процедуру так называемой межпозиционной идентификации. Для этого, в предлагаемом способе, производят последовательно выборку всех возможных сочетаний импульсов, взятых по одному с двух позиций, например с позиций 2 и 3. Всего для двух приемных позиций и четырех импульсов на каждой из них, если отсутствуют случайные слияния двух и более импульсов, получим четыре в квадрате, т.е. 16 возможных сочетаний.
Для каждого сочетания по полученным данным о временах задержки сигналов вычисляем три возможные координаты цели, оставляя только те из них, которые совпадают с координатами, вычисленными при использовании данных полученных с двух других позиций, в число которых включена третья позиция (приемник 4).
Координаты вычисляем, как и обычно, находя конфигурации трех поверхностей, соответствующих постоянным значениям сумм или/и разностей расстояний, соответствующих (через скорость света) замеренным значениям времени распространения сигналов. В примере изображенном на фиг. 3 двум значениям суммы расстояний от передатчика 1 к приемникам 2 и 3 на пути, проходящем, например, через элемент цели А, соответствуют эллипсоиды вращения «а» и «б» с фокусами, расположенными на передающей и соответствующих приемных позициях, а постоянному значению разности соответствует гиперболоид «в» вращения с фокусами расположенными на двух приемных позициях «а» и «б». Координаты точки А пересечения построенных по временам задержек трех поверхностей «а», «б», «в» и будут координатами элемента цели. Достоверными являются только те, вычисленные указанным образом координаты, которые не изменяются при переходе от одной конфигурации фигуры расположения приемных и передающей позиций к другой - в частности, включающей позицию приемника 4, которой будут соответствовать другой эллипсоид вращения «г», и другой гиперболоид вращения «д», имеющие фокусы в точках 1; 4 и 2; 4 соответственно. Очевидно, что новые эллипсоид «г» и гиперболоид «д», пересекутся со старым эллипсоидом «а» в той же точке А, если они построены с использованием новых времен задержек, взятых с приемника 4 при новых расстояниях, проходящих через тот же элемент А цели. В случае же, если мы взяли для альтернативного расчета эллипсоид и гиперболоид, относящиеся к разным элементам цели, точка пересечения нового сочетания поверхностей, не совпадет с точкой А, полученной в первом расчете.
Таким образом, предлагаемый способ межпозиционной идентификации основан на том, что при любом изменении конфигурации расположения трех базисных позиций результат вычислений координат должен оставаться неизменным, если выбранное сочетание времен задержки соответствует совокупности сигналов от одного из действительно существующего элемента цели. Для неправильно выбранных сочетаний при изменении конфигурации базиса вычисляемые значения координат будут изменяться, что позволяет делать однозначный вывод о ложности выбранного сочетания импульсов. Предлагаемый способ можно рассматривать, также, как новую разновидность избыточности измерений, которые служат для достоверной (не вероятностной) межпозиционной идентификации. Причем избыточность располагаемой информации, для повышения достоверности и точности определения координат цели, может быть увеличена добавлением дополнительных - четвертой и пятой точек для вариации конфигурации радиолокационной базы. А поскольку многопозиционная радиолокационная система для охвата большой территории должна быть построена в виде непрерывной сети, то для альтернативных вычислений координат достаточно использовать соседние элементы радиолокационной сети. В этом случае применение предлагаемого способа не связано с необходимостью увеличения числа радиолокационных станций.
Следует также заметить, что большие располагаемые объемы памяти и быстродействия современных средств цифровой обработки информации позволяют вместо вычислений путем решения сложных систем уравнений второго порядка находить решение путем использования предварительно составленных цифровых таблиц трехмерных функций координат в зависимости от заданных значений суммарных и разностных времен задержек, а затем, путем перебора ячеек памяти, напоминающему поиск нужной информации по известному сочетанию признаков, находить координаты точки пересечения трех вышеупомянутых поверхностей (эллипсоидов или /и гиперболоидов), которая соответствует искомой координате элемента цели. Т.е. весь процесс вычислений координат цели по данным задержкам времени будет сведен с выборке их из запоминающего устройства с использованием сочетания времен задержки в качестве адреса. Данный процесс аналогичен процессу поиска нужной информации в словаре, что не представляет трудностей для программирования.
На основе предлагаемого способа может быть создана радиолокационная сеть, континентальная, а с применением мобильных плав. Средств и глобальная, позволяющая производить контроль пусков баллистических ракет, а также производить командное управление наведением противоракет и перехватом их боеголовок без использования без привлечения спутниковых систем позиционирования, которые не могут рассматриваться, как надежные в случае всевозможных конфликтов. Причем такой способ наведения противоракет упрощает их конструкцию, позволяя сделать их выпуск массовым и обеспечить их численное превосходство над ракетными средствами нападения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ НАВЕДЕНИЯ ПРОТИВОРАКЕТЫ | 2021 |
|
RU2814291C2 |
| СПОСОБ НАВЕДЕНИЯ ПРОТИВОРАКЕТЫ НА СВЕРХЗВУКОВУЮ ЦЕЛЬ | 2022 |
|
RU2825905C2 |
| ОПТИЧЕСКАЯ СИСТЕМА СВЯЗИ ЧЕРЕЗ АТМОСФЕРУ | 2020 |
|
RU2813447C2 |
| Способ межпозиционного отождествления результатов измерений и определения координат воздушных целей в многопозиционной радиолокационной системе | 2019 |
|
RU2713193C1 |
| Способ глобальной активно-пассивной многопозиционной спутниковой радиолокации земной поверхности и околоземного пространства и устройство для его осуществления | 2019 |
|
RU2700166C1 |
| КИНЕТИЧЕСКАЯ БОЕГОЛОВКА С АЭРОДИНАМИЧЕСКИМ НАВЕДЕНИЕМ | 2022 |
|
RU2825027C2 |
| СПОСОБ ОБЗОРА ПРОСТРАНСТВА РАДИОЛОКАЦИОННЫМИ СТАНЦИЯМИ С ФАЗИРОВАННЫМИ АНТЕННЫМИ РЕШЕТКАМИ | 2012 |
|
RU2646847C2 |
| ПРИЁМНОЕ УСТРОЙСТВО ДЛЯ ШИРОКОПОЛОСНОЙ РАДИОСИСТЕМЫ | 2022 |
|
RU2827301C2 |
| РАДИОЛОКАЦИОННЫЙ КОМПЛЕКС | 2010 |
|
RU2422849C1 |
| ТРИАНГУЛЯЦИОННО-ГИПЕРБОЛИЧЕСКИЙ СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ РАДИОИЗЛУЧАЮЩИХ ВОЗДУШНЫХ ОБЪЕКТОВ В ПРОСТРАНСТВЕ | 2012 |
|
RU2503969C1 |
Изобретение относится к радиолокации и может быть применено в системах контроля воздушно-космической обстановки, а также в системах наведения противоракет. Техническим результатом является возможность разрешения множества близко расположенных между собой элементов цели при больших дальностях расположения цели от наземной радиолокационной инфраструктуры и при использовании антенн с широким углом диаграммы направленности. В заявленном способе предлагается производить межпозиционную идентификацию полученных на трех разнесенных между собой и передатчиком приемниках задержек времени распространения сигнала, рассеянного множеством элементов цели, путем проверки независимости получаемых координат от изменения конфигурации взаимного расположения приемников и передатчика. 3 ил.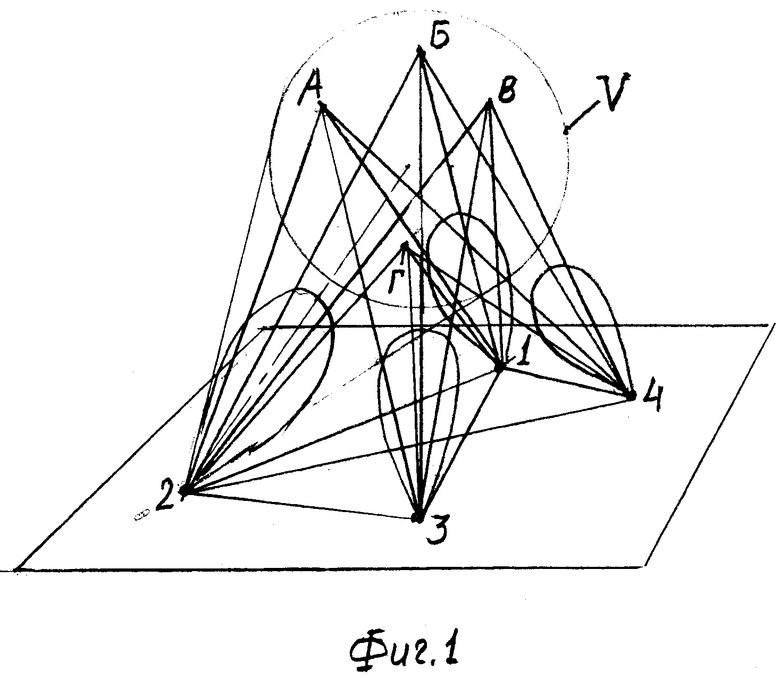
Способ активной многопозиционной радиолокации многоэлементной цели, состоящий в излучении передатчиком, в определенный момент времени, импульса и в приеме суммарного импульса от множества элементов цели на два разнесенных относительно передатчика и между собой приемника с последующим установлением соответствия, полученного на каждом из двух приемников, множества задержанных на разное время импульсов элементам цели, отличающийся тем, что указанное соответствие определяется путем вычисления координат цели для всех сочетаний импульсов, взятых по одному с каждого из двух приемников, с последующей проверкой равенства полученных координат координатам, вычисленным при замене сигнала одного из вышеуказанных двух приемников на сигнал с дополнительного – третьего приемника, разнесенного относительно передатчика и относительно двух указанных приемников.
| Способ межпозиционного отождествления результатов измерений и определения координат воздушных целей в многопозиционной радиолокационной системе | 2019 |
|
RU2713193C1 |
| СПОСОБ МНОГОПОЗИЦИОННОГО ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ДКМВ ПЕРЕДАТЧИКОВ | 2004 |
|
RU2285935C2 |
| СПОСОБ ОПЕРАТИВНОГО ПОЛУЧЕНИЯ РАДИОЛОКАЦИОННОЙ ИНФОРМАЦИИ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2560934C1 |
| СПОСОБ ОБНАРУЖЕНИЯ И ОПРЕДЕЛЕНИЯ КООРДИНАТ И ПАРАМЕТРОВ ЦЕЛИ В МНОГОПОЗИЦИОННОЙ РАДИОЛОКАЦИОННОЙ СИСТЕМЕ | 2006 |
|
RU2330306C1 |
| СПОСОБ РЕГИСТРАЦИИ ОТРАЖЕННОГО СИГНАЛА ПРИ РАДИОЛОКАЦИИ | 2013 |
|
RU2519443C1 |
| Способ определения параметров движения и траекторий воздушных объектов при полуактивной бистатической радиолокации | 2018 |
|
RU2687240C1 |
| JP 2012088163 A, 10.05.2012 | |||
| JP 2008139166 A, 19.06.2008 | |||
| EP 0058095 A1, 18.08.1982. | |||

