Изобретение относится к беспилотным летательным аппаратам сельскохозяйственного назначения и может быть использовано для опрыскивания растений рабочими растворами пестицидов и минеральных удобрений.
Известен беспилотный летательный аппарат сельскохозяйственного назначения, включающий корпус, по бокам которого жестко закреплены четыре горизонтальные штанги. На свободном конце каждой горизонтальной штанги сверху установлен двигатель с лопастями воздушного винта. В торце каждой горизонтальной штанги шарнирно закреплен рычаг с отверстием для штифта, а с боку жестко закреплена дугообразная пластина с позиционирующими отверстиями, выполненными под равными углами, где рычаг соединен с дугообразной пластиной через позиционирующие отверстия с помощью штифта. В верхней части корпуса установлена опорная стойка с модулем GPS-позиционирования. Нижняя часть корпуса оснащена шасси и двумя Т-образными шпонками. В нижней части корпуса, между шасси размещена емкость для рабочего раствора путем установки Т-образных шпонок в Т-образные пазы, выполненные в основании емкости. Емкость оснащена в верхней части заливной горловиной, по бокам - пустыми полостями для размещения аккумуляторных батарей, а в нижней части - сливной трубкой, которая соединена с насосом, установленным на кронштейне, жестко закрепленным за шасси. С боку на емкости дополнительно с помощью пластин закреплена трубка индикации уровня жидкости, которая соединена со сливной трубкой соединительной трубкой. Насос подающей трубкой соединен со штуцером, содержащим распределительные трубки, которые соединены с форсунками, установленными на свободных концах штоков, закрепленных за горизонтальные штанги шарнирами (см. патент CN № 206900640 U, М. Кл. B64С 27/00, 27/08, B64D 1/18, 47/00, 19.01.2018).
Недостатками данного беспилотного летательного аппарата сельскохозяйственного назначения является низкое качество обработки растений рабочим раствором.
Задача, на решение которой направлено изобретение - повышение качества обработки растений рабочим раствором.
Для решения этой задачи в беспилотном летательном аппарате сельскохозяйственного назначения, включающем корпус, по бокам которого жестко закреплены четыре горизонтальные штанги, где на свободном конце каждой горизонтальной штанги сверху установлен двигатель с лопастями воздушного винта, в верхней части корпуса установлена опорная стойка с модулем GPS-позиционирования, а нижняя часть корпуса оснащена шасси и двумя Т-образными шпонками, причем в нижней части корпуса, между шасси размещена емкость для рабочего раствора путем установки Т-образных шпонок в Т-образные пазы, выполненные в основании емкости; емкость оснащена в верхней части заливной горловиной, по бокам - пустыми полостями для размещения аккумуляторных батарей, а в нижней части - сливной трубкой, которая соединена с насосом, установленным на кронштейне, жестко закрепленном за шасси; насос подающей трубкой соединен со штуцером, содержащим распределительные трубки, которые соединены с форсунками, установленными на свободных концах штоков, закрепленных за горизонтальные штанги шарнирами, согласно изобретению, между насосом и подающей трубкой установлен расходомер жидкости, передающий сигналы закрепленному на боку емкости регулятору, через который осуществляется питание электродвигателя насоса, а регулятор соединен линией связи с модулем GPS-позиционирования.
Установка между насосом и подающей трубкой расходомера жидкости, передающего сигналы закрепленному на боку емкости регулятору, через который осуществляется питание электродвигателя насоса, и соединение регулятора линией связи с модулем GPS-позиционирования позволяют автоматически регулировать подачу рабочего раствора при действии возмущений в зависимости от скорости движения беспилотного летательного аппарата в горизонтальном направлении. В результате обеспечивается равномерное распределение рабочего раствора на растения согласно установленной норме. Таким образом, повышается качество обработки растений рабочим раствором.
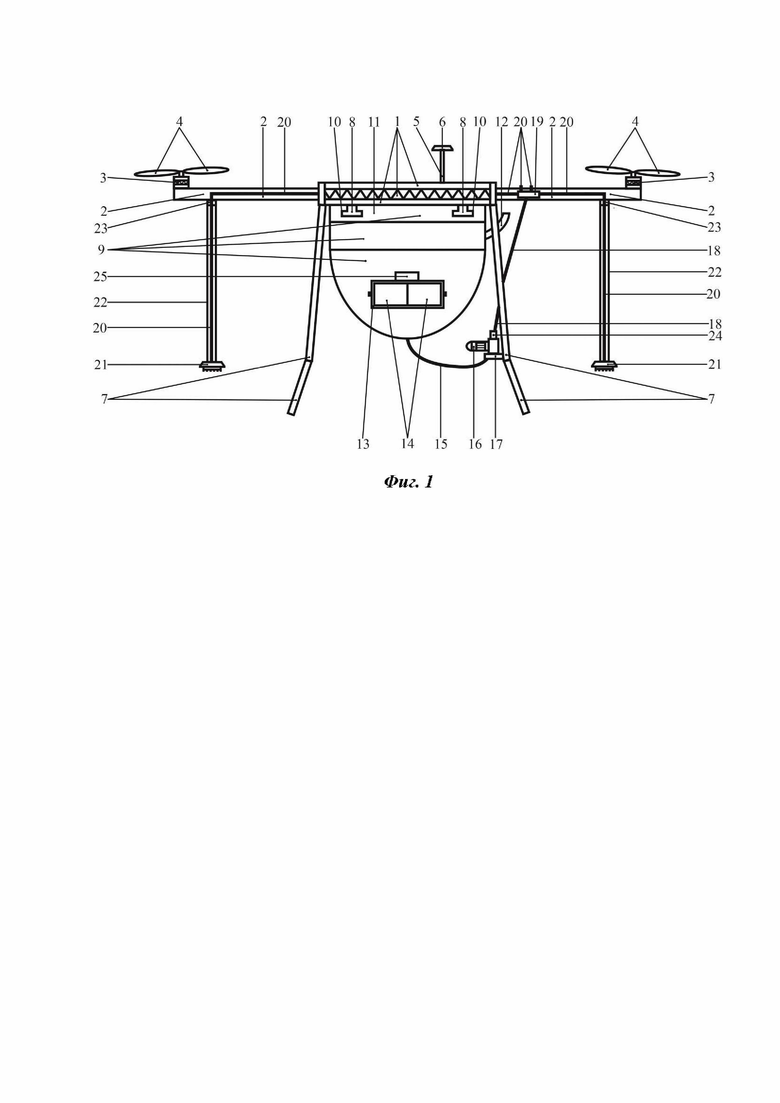
На фиг. 1 показан беспилотный летательный аппарат сельскохозяйственного назначения, вид сбоку.
Беспилотный летательный аппарат сельскохозяйственного назначения включает корпус 1, по бокам которого жестко закреплены четыре горизонтальные штанги 2. На свободном конце каждой горизонтальной штанги 2 сверху установлен двигатель 3 с лопастями воздушного винта 4. В верхней части корпуса 1 установлена опорная стойка 5 с модулем GPS-позиционирования 6, а нижняя часть корпуса 1 оснащена шасси 7 и двумя Т-образными шпонками 8. В нижней части корпуса 1 между шасси 7 размещена емкость 9 для рабочего раствора путем установки Т-образных шпонок 8 в Т-образные пазы 10, выполненные в основании 11 емкости 9. Емкость 9 оснащена в верхней части заливной горловиной 12, по бокам - пустыми полостями 13 для размещения аккумуляторных батарей 14, а в нижней части - сливной трубкой 15, которая соединена с насосом 16, установленным на кронштейне 17, жестко закрепленном за шасси 7. Насос 16 подающей трубкой 18 соединен со штуцером 19, содержащим распределительные трубки 20, которые соединены с форсунками 21, установленными на свободных концах штоков 22, закрепленных за горизонтальные штанги 2 шарнирами 23. Между насосом 16 и подающей трубкой 18 установлен расходомер жидкости 24, передающий сигналы закрепленному на боку емкости регулятору 25, через который осуществляется питание электродвигателя насоса 16, а регулятор 25 соединен линией связи с модулем GPS-позиционирования 6.
Беспилотный летательный аппарат сельскохозяйственного назначения работает следующим образом. Предварительно заряжаются аккумуляторные батареи 14 и устанавливаются в пустые полости 13 емкости 9, подсоединяются провода бортовой сети беспилотного летательного аппарата к клеммам аккумуляторных батарей 14. Через заливную горловину 12 в емкость 9 заливается рабочий раствор до установленного уровня, соответствующего допустимой грузоподъемности беспилотного летательного аппарата. Оператор настраивает регулятор 25 (вводит значения нормы расхода рабочего раствора и объема залитого в емкость) и сигналами с пульта управления запускает беспилотный летательный аппарат и направляет его в зону обработки. При входе беспилотного летательного аппарата в зону обработки оператор сигналом с пульта управления включает насос 16, который начинает подавать рабочий раствор из емкости 9 через сливную трубку 15 к форсункам 21 подающей трубкой 18, соединенной со штуцером 19, содержащим распределительные трубки 20. Регулятор 25 по сигналам модуля GPS-позиционирования 6 вычисляет скорость движения беспилотного летательного аппарата в горизонтальном направлении и устанавливает расход рабочего раствора путем изменения напряжения питания электродвигателя насоса 16 в зависимости от рассчитанной скорости и установленной нормы на единицу обрабатываемой площади. Расходомер жидкости 24, установленный между насосом 16 и подающей трубкой 18, измеряет фактический расход рабочего раствора и передает сигналы регулятору 25, который сравнивает расчетный расход с фактическим и корректирует расход рабочего раствора путем изменения напряжения питания электродвигателя насоса 16. Регулятор 25 по сигналам расходомера жидкости 24 вычисляет объем израсходованной жидкости и при достижении ранее введенного оператором значения объема отключает питание электродвигателя насоса 16. Также регулятор 25 по сигналам расходомера жидкости 24 при резком падении фактического расхода рабочего раствора отключает питание электродвигателя насоса 16. Оператор, получив сигнал от беспилотного летательного аппарата о выработке рабочего раствора, сигналами с пульта управления возвращает беспилотный летательный аппарат к месту заправки и обслуживания, где производится заправка емкости рабочим раствором, настраивается регулятор, заменяются аккумуляторные батареи, выполняются операции технического диагностирования и технического обслуживания.
Использование предложенного беспилотного летательного аппарата сельскохозяйственного назначения позволит повысить качество обработки растений средствами защиты и подкормки минеральными удобрениями.
| название | год | авторы | номер документа |
|---|---|---|---|
| Беспилотный авиационный робототехнический комплекс для внесения пестицидов | 2022 |
|
RU2779780C1 |
| Мобильный робот для контактного нанесения пестицидов | 2023 |
|
RU2797047C1 |
| Способ ультрамалообъемного опрыскивания сельскохозяйственных растений и устройство для его осуществления с использованием беспилотных авиационных средств вертолетного типа | 2019 |
|
RU2730640C1 |
| Способ внесения сыпучих средств защиты растений и комплекс для его осуществления | 2018 |
|
RU2694502C1 |
| Беспилотный летательный аппарат для внесения пестицидов в точном садоводстве | 2023 |
|
RU2793020C1 |
| Беспилотный летательный аппарат для обработки пестицидами пропашных культур | 2023 |
|
RU2808295C1 |
| Беспилотный летательный аппарат для обработки пестицидами садовых деревьев и кустарников | 2023 |
|
RU2808292C1 |
| Беспилотный летательный аппарат для внесения пестицидов в промышленном садоводстве и питомниководстве | 2023 |
|
RU2808008C1 |
| Беспилотный летательный аппарат и способ посадки такого аппарата | 2022 |
|
RU2808061C1 |
| Воздухоплавательный роботизированный аппарат для мониторинга и внесения средств защиты растений, удобрений в точном земледелии | 2019 |
|
RU2703198C1 |
Изобретение относится к конструкциям беспилотных летательных аппаратов. Беспилотный летательный аппарат сельскохозяйственного назначения включает корпус, четыре горизонтальные штанги, на свободных концах которых установлен двигатель с лопастями. В верхней части корпуса установлен модуль GPS-позиционирования. В нижней части корпуса между шасси размещена емкость для рабочего раствора путем установки Т-образных шпонок в Т-образные пазы, выполненные в основании емкости. Емкость в нижней части оснащена сливной трубкой, которая соединена с насосом, установленным на кронштейне, жестко закрепленном на шасси. Между насосом и подающей трубкой установлен расходомер жидкости, передающий сигналы закрепленному на боку емкости регулятору, через который осуществляется питание электродвигателя насоса, а регулятор соединен линией связи с модулем GPS-позиционирования. Обеспечивается повышение качества обработки растений рабочим раствором. 1 ил.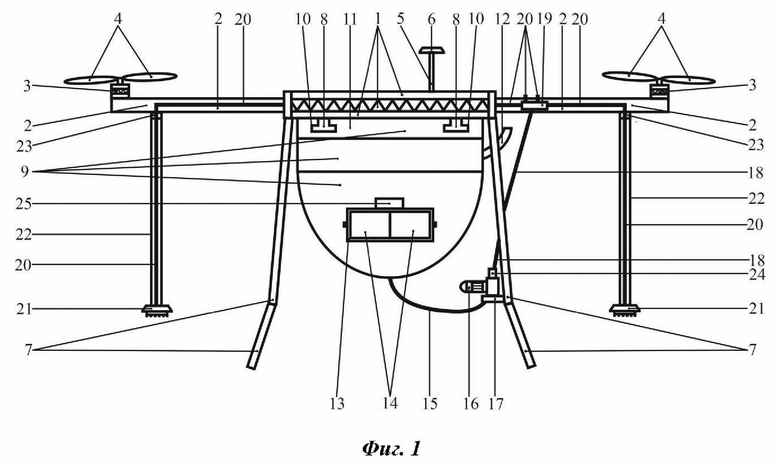
Беспилотный летательный аппарат сельскохозяйственного назначения, включающий корпус, по бокам которого жестко закреплены четыре горизонтальные штанги, где на свободном конце каждой горизонтальной штанги сверху установлен двигатель с лопастями воздушного винта, в верхней части корпуса установлена опорная стойка с модулем GPS-позиционирования, а нижняя часть корпуса оснащена шасси и двумя Т-образными шпонками, причем в нижней части корпуса между шасси размещена емкость для рабочего раствора путем установки Т-образных шпонок в Т-образные пазы, выполненные в основании емкости; емкость оснащена в верхней части заливной горловиной, по бокам – пустыми полостями для размещения аккумуляторных батарей, а в нижней части – сливной трубкой, которая соединена с насосом, установленным на кронштейне, жестко закрепленном за шасси; насос подающей трубкой соединен со штуцером, содержащим распределительные трубки, которые соединены с форсунками, установленными на свободных концах штоков, закрепленных за горизонтальные штанги шарнирами, отличающийся тем, что между насосом и подающей трубкой установлен расходомер жидкости, передающий сигналы закрепленному на боку емкости регулятору, через который осуществляется питание электродвигателя насоса, а регулятор соединен линией связи с модулем GPS-позиционирования.
| CN 206900640 U, 19.01.2018 | |||
| 0 |
|
SU194376A1 | |
| DE 102018104827 A1, 05.09.2019 | |||
| Многофункциональная беспилотная летающая система для опрыскивания растений в труднодоступных местах | 2022 |
|
RU2793489C1 |
| US 20220247347 A1, 04.08.2022 | |||
| Способ получения вторичных алифатических аминов | 1932 |
|
SU31940A1 |

