Изобретение относится к области военной техники, а именно к автоматизированному вооружению с дистанционным управлением, которое устанавливается на робототехнические комплексы, и может быть использовано для обнаружения и огневого поражения различных целей при боевых действиях.
Наиболее близким по технической сущности является известный боевой роботизированный мобильный комплекс, содержащий легкобронированную машину с установленным на ней двигателем, трансмиссией, ходовой частью с движителем, вооружением и аппаратурой управления (Патент RU 2584766, МПК F41H 7/00 от 27.05.2015)
Недостатком известного боевого роботизированного мобильного комплекса является сложность конструкции, обусловленная необходимостью применения в качестве боевого модуля модернизированные системы вооружения, способные разместиться в ограниченном пространстве башни комплекса. Техническим результатом предложения является разработка компактного и простого в эксплуатации и изготовлении боевого модуля робототехнического комплекса с дистанционным наведением и ведением огня.
Технический результат достигается за счет того, что штатная рама автоматического гранатомета АГС-17 жестко закреплена в верхней части робототехнического комплекса, а в торцевой части автоматического гранатомета расположен шаговый двигатель, выходным звеном которого является червячный вал, который в свою очередь через червячное колесо и шестерню соединен с шестерней вертикального наведения, также в торцевой части автоматического гранатомета АГС-17 смонтирован блок электроспуска, включающий корпус с электромагнитом, якорь и двуплечий рычаг, при этом шаговый двигатель и блок электроспуска соединены и дистанционно управляются электронным блоком управления.
Предложение поясняется рисунком, на котором изображены:
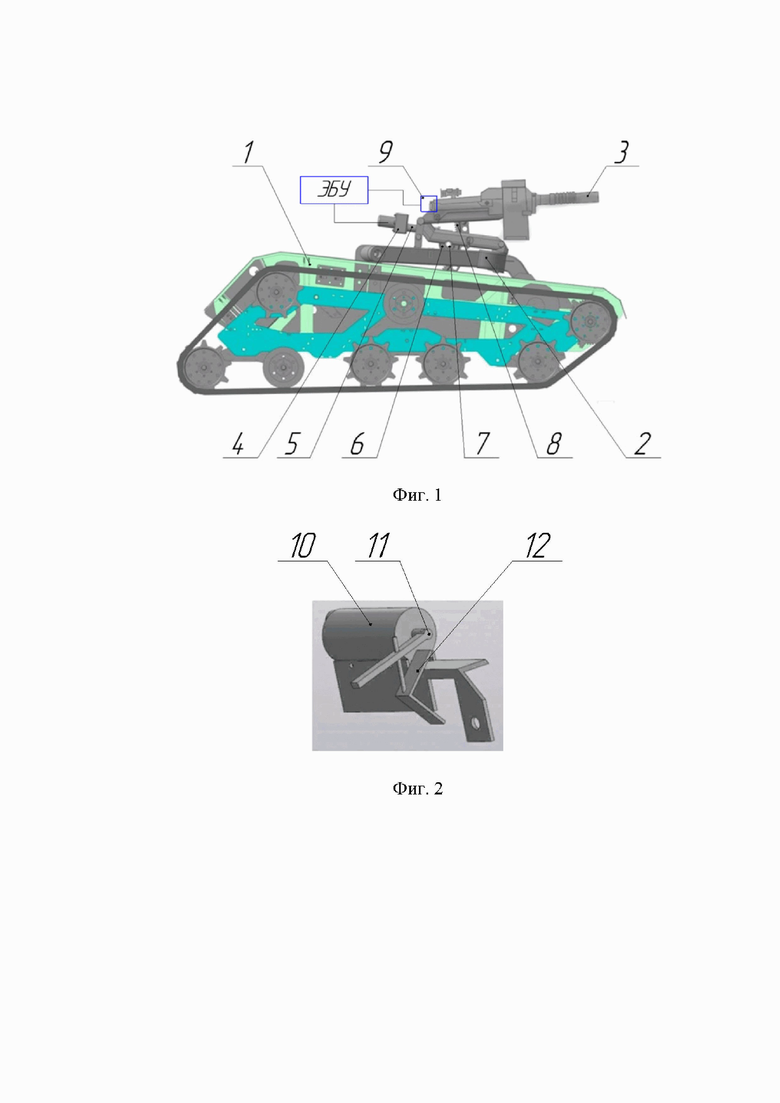
Фиг. 1 - общий вид боевого модуля робототехнического комплекса с дистанционным наведением и ведением огня;
Фиг. 2 – блок электроспуска;
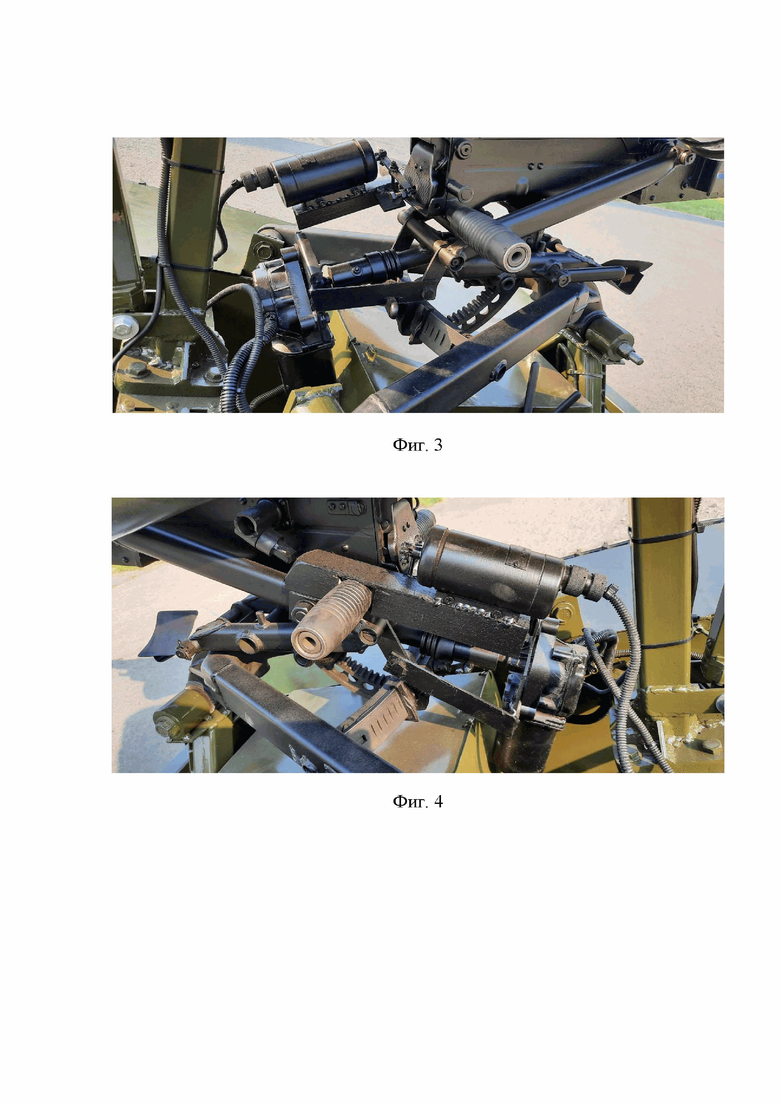
Фиг. 3, 4 – фотографии физического исполнения боевого модуля.
Заявленный боевой модуль робототехнического комплекса с дистанционным наведением и ведением огня содержит робототехнический комплекс, включающий дистанционно-управляемую машину 1 с установленным на ней двигателем, трансмиссией, ходовой частью с движителем, вооружением и аппаратурой управления, на котором установлена штатная рама 2 автоматического гранатомета 3 АГС-17 жестко закрепленная в верхней части робототехнического комплекса, а в торцевой части автоматического гранатомета 3 АГС-17 расположен шаговый двигатель 4, выходным звеном которого является червячный вал 5, который в свою очередь через червячное колесо 6 и шестерню 7 соединен с шестерней вертикального наведения 8, также в торцевой части автоматического гранатомета 3 АГС-17 смонтирован блок электроспуска 9, включающий корпус с электромагнитом 10, якорь 11 и двуплечий рычаг 12, при этом шаговый двигатель 4 и блок электроспуска 9 соединены и дистанционно управляются электронным блоком управления 13.
Заявленный боевой модуль робототехнического комплекса с дистанционным наведением и ведением огня работает следующим образом.
После установки и крепления штатной рамы 2 автоматического гранатомета 3 АГС-17 на верхнюю часть дистанционно-управляемой машины 1 наведение и ведение огня осуществляется посредством управляющих команд от оператора, которые передаются на электронный блок управления 13. Изменение горизонтального положения ствола автоматического гранатомета 3 АГС-17 осуществляется благодаря изменению положения выходного звена шагового двигателя 4, который в свою очередь, перемещает червячное колесо 6 и шестерню 7 воздействуя на шестерню вертикального наведения 8. При этом изменения вертикального положения ствола автоматического гранатомета 3 АГС-17 не происходит, так как в этой плоскости он не жестко закреплен и не имеет степени свободы.
При наведении на цель, оператор через электронный блок управления 13 воздействует на блок электроспуска 9, а именно инициирует перемещение электромагнита 10, якоря 11 и двуплечего рычага 12 в положение, обеспечивающее механическое воздействие на спусковую площадку автоматического гранатомета 3 АГС-17.
| название | год | авторы | номер документа |
|---|---|---|---|
| Боевой модуль робототехнического комплекса с дистанционным наведением и ведением огня | 2024 |
|
RU2829896C1 |
| Боевой модуль робототехнического комплекса с универсальным ложементом | 2024 |
|
RU2838709C1 |
| Боевой модуль робототехнического комплекса военного назначения с устройством прерывания очереди при стрельбе из автоматического оружия | 2023 |
|
RU2831825C1 |
| Комплекс вооружения танка | 2023 |
|
RU2818147C1 |
| БОЕВОЙ РОБОТИЗИРОВАННЫЙ МОБИЛЬНЫЙ КОМПЛЕКС | 2015 |
|
RU2584766C1 |
| Комплекс вооружения танка | 2023 |
|
RU2816418C1 |
| МОДУЛЬНАЯ АВТОМАТИЧЕСКАЯ ОГНЕВАЯ ТОЧКА АЗ-1 | 2023 |
|
RU2831239C1 |
| БОЕВОЙ МОДУЛЬ С ДИСТАНЦИОННЫМ УПРАВЛЕНИЕМ | 2016 |
|
RU2629688C1 |
| Наземный роботизированный комплекс | 2023 |
|
RU2819223C1 |
| Боевой модуль с магнитожидкостным компенсатором отдачи | 2023 |
|
RU2825790C1 |
Изобретение относится к военной технике. Боевой модуль робототехнического комплекса с дистанционным наведением и ведением огня содержит легкобронированную машину с установленным на ней двигателем, трансмиссией, ходовой частью с движителем, вооружением и аппаратурой управления. Штатная рама автоматического гранатомета АГС-17 жестко закреплена в верхней части комплекса. В торцевой части гранатомета АГС-17 расположен шаговый двигатель, выходным звеном которого является червячный вал, который, через червячное колесо и шестерню соединен с шестерней вертикального наведения. В торцевой части автоматического гранатомета АГС-17 смонтирован блок электроспуска, включающий корпус с электромагнитом, якорь и двуплечий рычаг. Шаговый двигатель и блок электроспуска соединены и дистанционно управляются электронным блоком управления. Улучшаются компактность и простота. 4 ил.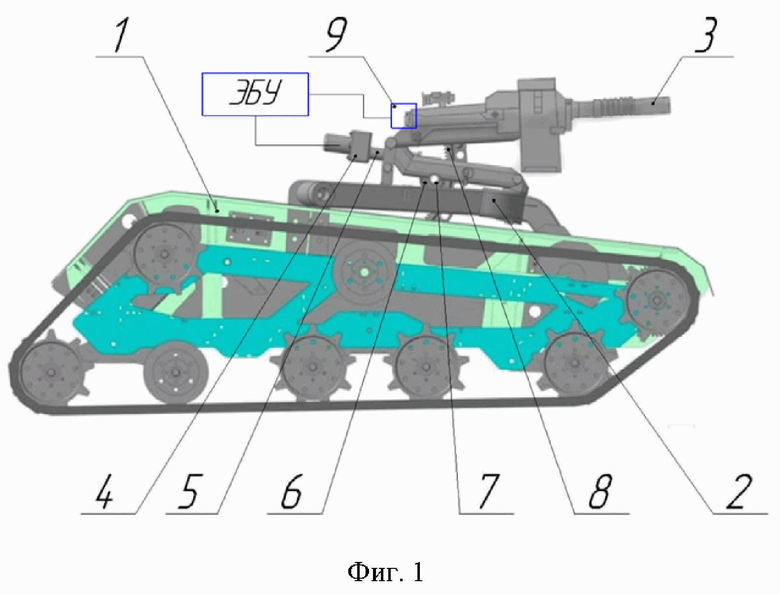
Боевой модуль робототехнического комплекса с дистанционным наведением и ведением огня, содержащий легкобронированную машину с установленным на ней двигателем, трансмиссией, ходовой частью с движителем, вооружением и аппаратурой управления, отличающийся тем, что штатная рама автоматического гранатомета АГС-17 жестко закреплена в верхней части робототехнического комплекса, а в торцевой части автоматического гранатомета АГС-17 расположен шаговый двигатель, выходным звеном которого является червячный вал, который в свою очередь через червячное колесо и шестерню соединен с шестерней вертикального наведения, также в торцевой части автоматического гранатомета АГС-17 смонтирован блок электроспуска, включающий корпус с электромагнитом, якорь и двуплечий рычаг, при этом шаговый двигатель и блок электроспуска соединены и дистанционно управляются электронным блоком управления.
| БОЕВОЙ РОБОТИЗИРОВАННЫЙ МОБИЛЬНЫЙ КОМПЛЕКС | 2015 |
|
RU2584766C1 |
| ГРАНАТОМЕТНЫЙ КОМПЛЕКС | 2013 |
|
RU2529247C1 |
| ДИСТАНЦИОННО УПРАВЛЯЕМЫЙ МОБИЛЬНЫЙ РОБОТ, ВИДЕОКАМЕРА МОБИЛЬНОГО РОБОТА, ЗВУКОПРИЕМНАЯ СИСТЕМА САМОНАВЕДЕНИЯ МОБИЛЬНОГО РОБОТА, СФЕРИЧЕСКАЯ ГРАНАТА | 2011 |
|
RU2473863C1 |
| ФОРТИФИКАЦИОННАЯ РЕАКТИВНАЯ ОГНЕВАЯ СИСТЕМА | 2014 |
|
RU2617860C2 |
| БОЕВОЙ МОДУЛЬ С ДИСТАНЦИОННЫМ УПРАВЛЕНИЕМ | 2016 |
|
RU2629688C1 |
| МЕХАНИЗМ УСТАНОВКИ ГРАНАТОМЕТА НА БОЕВУЮ МАШИНУ | 2011 |
|
RU2479816C2 |
| US 9746270 B1, 29.08.2017 | |||
| АВТОМАТИЧЕСКИЕ СИСТЕМЫ ТРАНСПОРТНЫХ СРЕДСТВ : УЧЕБНИК / В.В.БЕЛЯКОВ И ДР | |||
| - М.: ФОРУМ : ИНФРА-М, 2018 | |||
| Судно | 1918 |
|
SU352A1 |
| Телефонный аппарат, отзывающийся только на входящие токи | 1921 |
|
SU324A1 |
| МОБИЛЬНЫЕ РОБОТЫ | |||
