Изобретение относится к машиностроению, в частности к конструкции промышленного робота, предназначенного для формирования изделий с помощью аддитивной технологии, предполагающей использование лазерного луча.
Известна конструкция промышленного робота для лазерной обработки, которая смонтирована на станине и содержит блок управления, связанный с лазерной установкой, генерирующий лазерный луч, направляемый по системе его транспортировки к конечному звену антропоморфного манипулятора, несущему фокусирующее устройство. Манипулятор имеет одно неподвижное звено и, по крайней мере, пять последовательно шарнирно сочлененных подвижных звеньев, индивидуальный привод каждого из которых содержит двигатель и редуктор [RU 2030979].
Описанный выше промышленный робот работает следующим образом.
Перемещение фокусирующего устройства относительно обрабатываемой поверхности изделия, установленного на станине, производится по заданной программе с блока управления с помощью двигателей подвижных звеньев, которые посредством редукторов приводят в относительное вращение эти звенья манипулятора. Обработка изделия (сварка, резка или термообработка) осуществляется при одновременной работе лазерной установки и приводов манипулятора. При этом луч лазера проходит внутри неподвижного звена манипулятора и направляется системой зеркал, расположенных в подвижных звеньях манипулятора таким образом, что направление луча совпадает с осями вращения подвижных звеньев. Благодаря этому луч достигает фокусирующего устройства независимо от конкретного расположения звеньев и обработка лазерным лучом может производиться по любой запрограммированной траектории.
Физической основой, используемой в роботе технологии, является термическое воздействие сфокусированного лазерного луча на обрабатываемом изделии. Лазерная технология дает возможность изготовления изделия из отдельных; фрагментов путем сварки, а также его резки и термообработки, которая может быть поверхностной, с целью придания определенных свойств, в частности, прочностных.
Однако конструкция робота не обеспечивает возможности использования процесса наплавки, так как в ней не предусмотрено соответствующее оборудование, что значительно снижает технологические возможности робота в целом. Другими словами, обладая энергетическими возможностями, робот-аналог не может обеспечить прямого формирования изделия из металла путем наплавки. Кроме того, в роботе система доставки лазерного луча от соответствующей установки к фокусирующему устройству обеспечивается совокупностью зеркал, смонтированных в подвижных звеньях манипулятора, что значительно усложняет конструкцию робота, а сочлененность звеньев манипулятора, образующих консоль, снижает его жесткость, что влияет на точность выполняемых операций.
Другим аналогом является промышленный робот для лазерной обработки [CN 201720607 U], который свободен от первого из названных выше недостатков предыдущего аналога. Он содержит станину, блок управления и лазерную установку с системой транспортировки лазерного луча к конечному звену антропоморфного манипулятора, несущего фокусирующее устройство, коаксиально которому смонтировано сопло аппарата подачи газопорошковой смеси, при этом система управления аппарата подачи связана с блоком управления роботом.
Известно, что процесс наплавки может быть осуществлен как с использованием проволоки, так и посредством применения металлического порошка. Наплавка проволокой используется, как правило, для проведения грубых операций, поскольку не может обеспечить высокой точности. Это объясняется тем, что используемая проволока имеет на порядок больший размер в сравнении с гранулометрическим составом порошковых материалов. В связи с этим, при наплавке проволокой слои получаются массивными и требуют значительной последующей механической обработки. Кроме того, проведение наплавки проволокой является невозможным в труднодоступных местах, на наклонных и отвесных поверхностях, так как расплавленный металл под действием силы тяжести способен к растеканию.
В случае применения порошковой наплавки частицы порошка подаются коаксиально лазерному лучу с помощью транспортирующего инертного газа под давлением, поддающимся регулированию, что позволяет производить наплавку под самыми различными углами без каких-либо ограничений. Газопорошковая лазерная наплавка дает возможность одновременно использовать порошки различного химического состава и проводить в процессе наплавки «in-situ» синтез сплавов, создавая изделия с градиентным химическим составом и, соответственно, свойствами, при этом появляется возможность проводить операцию наплавки на конструкциях, изготовленных из разных типов металла с применением одного сопла. Для лазерной наплавки с применением проволоки такие операции трудноосуществимы и связаны с большой потерей времени или не доступны в принципе.
Недостатком описанного робота является ограниченность технологических возможностей манипулятора по реализации сложных траекторий перемещения фокусирующего устройства при формировании изделий значительных размеров, т.е. отдельные элементы которых находятся вне досягаемости манипулятора. Кроме того, ему присущи и сложность конструкции манипулятора, пониженная жесткость последнего и, как следствие, снижение точности при формировании изделия, а значит и его качества. Известна конструкция промышленного робота, описанная в патенте СА 2815480. Он содержит станину, на которой установлен антропоморфный манипулятор с неподвижным звеном и несколько шарнирно сочлененных подвижных звеньев, конечное из которых несет фокусирующее устройство, оптически связанное с лазерной установкой посредством ряда зеркал, расположенных внутри звеньев манипулятора и образующих систему транспортировки лазерного луча к изделию, формирующемуся на подвижной платформе в процессе эксплуатации робота. Платформа кинематически связана с электродвигателем, закрепленным на станине и замкнутым на блок системы его управления, которая, в свою очередь, замкнут на блок управления работой промышленным роботом и, в частности, манипулятором и лазерной установкой. В комплект оборудования робота входит аппарат подачи газопорошковой смеси к фокусирующему устройству. Аппарат сопряжен с системой его управления и выполнен с ней в едином блоке, который связан с блоком управления работой робота. Описанный выше промышленный робот предназначен для реализации аддитивных технологий в промышленности, которые имеет значительные перспективы. Производство изделий со сложной геометрией и из специфических материалов распространено в транспортном и энергетическом машиностроении, аэрокосмической промышленности, восстановительной хирургии и дентальной медицине. Непосредственное выращивание изделий из металла мотивировано высокой экономической целесообразностью.
Таким образом, вышеописанный робот решает задачу расширения технологических возможностей путем введения в него подвижной платформы, однако сложность конструкции манипулятора, присущая, как аналогам, так и прототипу, пониженная его жесткость и, как следствие, снижение точности при формировании изделия, а значит, и его качества, остаются неустранимыми недостатками всех вышеописанных промышленных роботов, снабженных многозвенной манипуляционной системой.
В качестве прототипа предлагаемому изобретению выбрано техническое решение, описанное в CN 109049701 и относящееся к промышленному роботу для формирования изделия с помощью аддитивной технологии. Робот содержит манипуляционное устройство, выполненное в виде платформы Гью-Стюарта, которая состоит из основания и платформы, связанных между собой октаэдрально скомпонованными стойками, выполненными в виде линейных приводов. Кроме того, робот имеет фокусирующее устройство лазерной установки, соединенное с соплом аппарата для подачи газопорошковой смеси, подвижный стол для размещения формируемого изделия и систему управления, связанную с лазерной установкой, приводами стоек, аппаратом подачи газопорошковой смеси подвижным столом. Все перечисленные выше устройства, включая и платформу Гью-Стюарта, составляющие совместно ^ промышленный робот, скомпонованы на общей несущей раме, представляющей собой каркас пустотелого параллелепипеда, внутри которого и размещаются эти устройства. Особенностью робота является то, что собственно платформа, как часть манипуляционного устройства, несет подвижный стол для формирования изделия и является, таким образом, приводом для этого стола. Что же касается фокусирующего устройства лазерной установки и сопла аппарата для подачи газопорошковой смеси, то они расположены отдельно и связаны с механизмом их перемещения, представляющим собой двухкоординатную систему, образованную парой перпендикулярных направляющих, по которым перемещается пара кареток, одна из которых несет, совмещенные в одном узле, фокусирующее устройство и сопло. Механизм перемещения расположен на раме над платформой Гью-Стюарта, линейные приводы которой предназначены для отработки третьей, т.е. вертикальной координаты, что, в целом, дает возможность реализации аддитивной технологии для формирования изделия.
Недостатком робота-прототипа является сложность его конструкции, предопределяемая, прежде всего, наличием отдельного привода перемещения фокусирующего устройства и сопла, а также наличием несущей рамы.
Задачей изобретения является упрощение конструкции промышленного робота для формирования изделия с помощью аддитивной технологии.
Поставленная задача решается за счет того, что в промышленном роботе для формирования изделия с помощью аддитивной технологии, содержащем манипуляционное устройство, выполненное в виде платформы Гью-Стюарта, состоящей из основания и платформы, связанных между собой октаэдрально скомпонованными стойками, которые выполнены в виде линейных приводов, а также фокусирующее устройство лазерной установки, соединенное с соплом аппарата для подачи газопорошковой смеси, стол для размещения формируемого изделия и систему управления, связанную с лазерной установкой приводами стоек, аппаратом подачи газопорошковой смеси и подвижным столом, причем последний расположен на основании манипуляционного устройства, а фокусирующее устройство лазерной установки с соплом для подачи газопорошковой смеси установлено на платформе манипуляционного устройства напротив подвижного стола. При этом линейные приводы стоек выполнены в виде электроцилиндров.
Технический результат изобретения заключается в том, что за счет расположения фокусирующего устройства, сопла аппарата ^.подачи газопрошковой смеси и подвижного стола на платформе и основании манипуляционного устройства, выполненного в виде платформы Гью-Стюарта, значительно упрощается конструкция робота, следствием чего является снижение трудоемкости его изготовления, материалоемкости, уменьшение габаритов, что, в конечном итоге, ведет к улучшению экономических показателей.
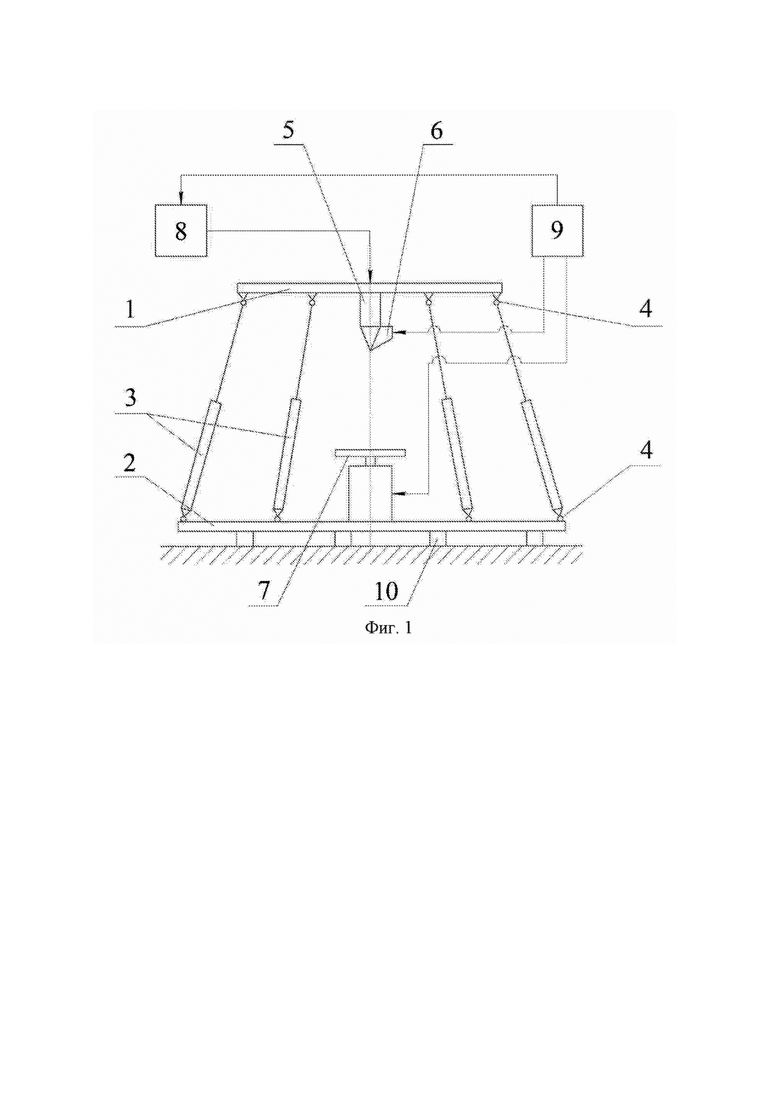
На чертеже дано схематическое изображение промышленного робота предлагаемой конструкции.
Промышленный робот для формирования изделия с помощью аддитивной технологии содержит манипуляционную устройство, выполненную в виде платформы Гью-Стюарта, которая состоит из собственно платформы 1 и основания 2, связанных между собой с помощью октаэдрально скомпонованных стоек 3, соединенных с платформой 1 и основанием 2 с помощью шарнирных соединений 4. Стойки 3 представляют собой линейные приводы, выполненные, например, в виде электроцилиндров. Между платформой 1 и основанием 2, по их центральной части, напротив друг друга, на первой смонтировано фокусирующее устройство 5 лазерной установки, являющейся источником лазерного луча, соединенное с соплом 6 аппарата подачи металлической газопорошковой смеси, а на втором - подвижный стол 7 манипуляционного устройства. Фокусирующее устройство 5 связано с лазерной установкой 8, являющейся источником лазерного луча. В блоке 9 размещена система управления роботом, включая управление лазерной установкой 8, приводами стоек 3, соплом 6 аппаратом подачи газопорошковой смеси и подвижным столом 7. Основание 3 установлено на опорах 10.
Платформа Гью-Стюарта имеет шесть степеней свободы, включая три поступательных и три вращательных как абсолютно твердое тело, или иначе говоря, обладающее абсолютной жесткостью. Длину стоек 3 можно изменять по команде с блока управления 9, и тем самым изменять ориентацию платформы 1, а вместе с нею и ориентацию фокусирующего устройства 5. Перемещение в пространстве по необходимой траектории фокусирующего устройства 5 дополняется перемещением подвижного стола 7, что обеспечивает формирование изделий посредством аддитивной технологии с высокой точностью, обусловленной жесткостью манипуляционной системы, выполненной в виде платформы Гью-Стюарта.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРОМЫШЛЕННЫЙ ГИБРИДНЫЙ РОБОТ ДЛЯ ЛАЗЕРНОЙ ТЕХНОЛОГИИ | 2023 |
|
RU2817720C1 |
| Способ роботизированной лазерной наплавки для изделий из штамповой стали | 2023 |
|
RU2820294C1 |
| Способ выращивания монокристалла и устройство для его осуществления | 2017 |
|
RU2638850C1 |
| СПОСОБ ЛАЗЕРНОЙ ОБРАБОТКИ ИЗДЕЛИЯ И УСТРОЙСТВО ЕГО РЕАЛИЗУЮЩЕЕ | 2018 |
|
RU2697124C2 |
| СИСТЕМА ИМИТАЦИИ АКСЕЛЕРАЦИОННЫХ ВОЗДЕЙСТВИЙ ПОЛУНАТУРНОГО МОДЕЛИРУЮЩЕГО КОМПЛЕКСА ЭРГОНОМИЧЕСКОГО ПРОЕКТИРОВАНИЯ | 2024 |
|
RU2834755C1 |
| Способ лазерной наплавки покрытий на образец и устройство для его осуществления | 2017 |
|
RU2656906C1 |
| СПОСОБ ЧЕТЫРЕХСОПЛОВОЙ ГАЗОПОРОШКОВОЙ ЛАЗЕРНОЙ НАПЛАВКИ С РЕГУЛИРОВАНИЕМ РАСХОДА ПОРОШКА | 2016 |
|
RU2660499C2 |
| Способ сверхзвуковой лазерной наплавки порошковых материалов и устройство его реализующее | 2018 |
|
RU2676064C1 |
| УСТРОЙСТВО АВТОМАТИЗАЦИИ ИСПЫТАНИЙ ДВИЖИТЕЛЕЙ АВТОНОМНЫХ ОБЪЕКТОВ | 2020 |
|
RU2739905C1 |
| МНОГОФУНКЦИОНАЛЬНЫЙ ЛАЗЕРНЫЙ МОДУЛЬ МЛМ (КОМПЛЕКС) | 2021 |
|
RU2769194C1 |
Изобретение относится к области машиностроения и может быть использовано в конструкциях промышленных роботов, предназначенных для формирования изделий посредством аддитивной технологии с использованием лазерного луча. Робот содержит манипуляционное устройство, выполненное в виде платформы Гью-Стюарта, состоящей из основания и платформы, связанных между собой октаэдрально скомпанованными стойками, выполненными в виде линейных приводов, фокусирующее устройство лазерной установки, соединенное с соплом аппарата для подачи газопорошковой смеси, стол для размещения формируемого изделия и систему управления, связанную с лазерной установкой, линейными приводами стоек, аппаратом подачи газопорошковой смеси и подвижным столом. При этом подвижный стол расположен на основании манипуляционного устройства, а фокусирующее устройство лазерной установки с соплом для подачи газопорошковой смеси установлено на платформе манипуляционного устройства напротив подвижного стола. Использование изобретения позволяет значительно упростить конструкцию робота и уменьшить его габариты. 1 з.п. ф-лы, 1 ил.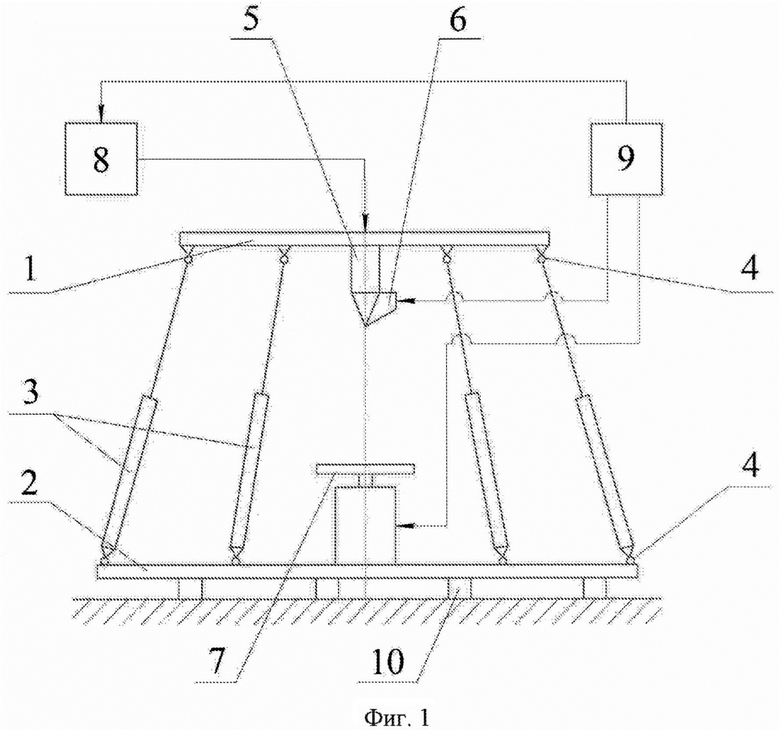
1. Промышленный робот для формирования изделия с помощью аддитивной технологии, содержащий манипуляционное устройство, выполненное в виде платформы Гью-Стюарта, состоящей из основания и платформы, связанных между собой октаэдрально скомпанованными стойками, выполненными в виде линейных приводов, фокусирующее устройство лазерной установки, соединенное с соплом аппарата для подачи газопорошковой смеси, стол для размещения формируемого изделия и систему управления, связанную с лазерной установкой, линейными приводами стоек, аппаратом подачи газопорошковой смеси и подвижным столом, отличающийся тем, что подвижный стол расположен на основании манипуляционного устройства, а фокусирующее устройство лазерной установки с соплом для подачи газопорошковой смеси установлено на платформе манипуляционного устройства напротив подвижного стола.
2. Промышленный робот по п. 1, отличающийся тем, что линейные приводы стоек выполнены в виде электроцилиндров.
| CN 109049701 A, 21.12.2018 | |||
| 0 |
|
SU161667A1 | |
| Металлическая многослойная прокладка с эластичной набивкой | 1949 |
|
SU86512A1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ МЕТАЛЛИЧЕСКОГО ИЗДЕЛИЯ ЛАЗЕРНЫМ ЦИКЛИЧНЫМ НАНЕСЕНИЕМ ПОРОШКОВОГО МАТЕРИАЛА И УСТАНОВКА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2550670C2 |
| US 2009206065 A1, 20.08.2009 | |||
| CN 109228307 A, 18.01.2019. | |||

