Предложенное техническое решение относится к области машиностроения и может быть использовано в конструкциях промышленных роботов, предназначенных для формирования изделий с применением аддитивных технологий и использованием лазерного излучения.
Известен промышленный гибридный робот для лазерной технологии, содержащий манипуляционное устройство параллельной структуры, состоящий из основания и подвижной платформы, кинематических пар и линейных приводов (Патент РФ № 2736148, МПК B22F3/105, 2019 г.)
Известный робот содержит манипуляционное устройство, выполненное в виде платформы Гью-Стюарта, состоящей из основания и платформы, связанных между собой октаэдрально скомпонованными стойками, которые выполнены в виде линейных приводов, выполненных в виде электроцилиндров. Этот робот может найти применение при резке и сварке сложных ответственных деталей, а также в медицине для оперативного изготовления различных типов имплантов.
Недостатком устройства является необходимость использовать шесть линейных приводов при выполнении самых элементарных движений, что усложняет систему управления приводами. Кроме этого, робот имеет избыточную степень свободы, связанную с вращением лазерной головки вокруг собственной оси. Следовательно, целесообразно уменьшить число двигателей до пяти. Цель разработки - повышение эксплуатационной эффективности робота при одновременном упрощении его конструкции.
Поставленная цель достигается тем, что предлагаемый промышленный гибридный робот для лазерной технологии содержит манипуляционное устройство параллельной структуры, основание, подвижную платформу, кинематические пары, линейные приводы и содержащую лазерную головку, при этом изделие формируется на трехподвижной платформе дельта-робота.
Кроме того, дельта-робот содержит три кинематические цепи в виде параллелограммов, прикрепленные с помощью шарниров к основанию и к подвижной платформе дельта-робота, перемещение которой обеспечивается тремя линейными приводами, установленными на стойках основания манипулятора. Лазерная головка вмонтирована в двухподвижный механизм шарнира Гука, который расположен на основании манипуляционного устройства, напротив подвижной платформы для обеспечения возможности углового перемещения лазерной головки вокруг двух взаимно перпендикулярных осей, с помощью двух приводов вращения.
Таким образом, в предлагаемом роботе имеется пять степеней свободы, из которых тремя линейными перемещениями может обладать подвижная платформа вместе с изделием, а двумя угловыми перемещениями - лазерная головка, установленная на неподвижной платформе робота. Разделение на угловые и линейные перемещения позволяет обеспечить одинаковую точность позиционирования угловых координат в каждой точке рабочей зоны, повысить точность изготовления изделия, за счет жесткости конструкции параллельного механизма, расширить функциональные возможности робота для изготовления деталей со сложной геометрией и, при этом упростить систему управления. Кроме того, одним из преимуществ предлагаемой конструкции является отсутствие у лазерной головки линейных перемещений вместе с системой подводки материалов, энергии, датчиков контроля и т.д., которые обладают инертностью и оказывают сопротивление движению головки, что повышает динамическую погрешность при изготовлении деталей. Другим преимуществом предлагаемого устройства является независимость угловых движений от линейных перемещений, поскольку в любой точке зоны обработки лазерная головка имеет один и тот же диапазон угловых координат.
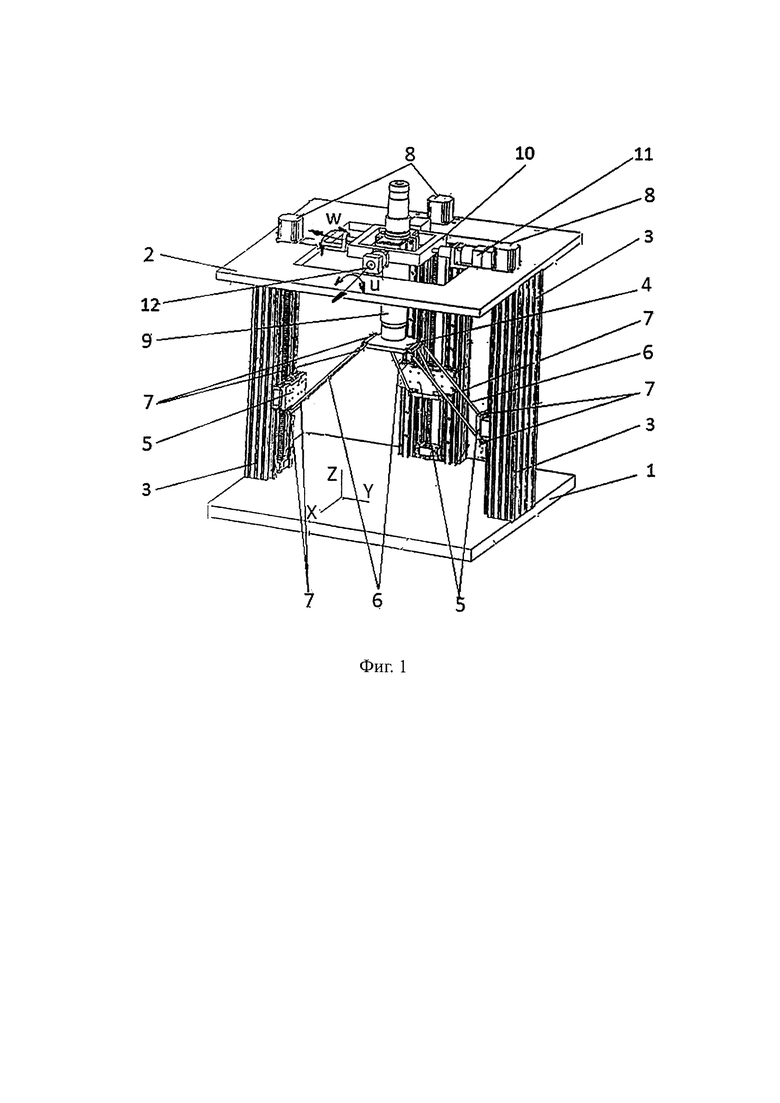
На фиг. 1 дано схематическое изображение промышленного робота.
Корпус робота состоит из неподвижного основания 1 и неподвижной платформы 2, которые соединены тремя одинаковыми стойками 3, которые представляют собой линейные приводы, выполненные в виде электроцилиндров, и установлены на основании. Конструкция робота содержит манипуляционное устройство дельта-робота, имеющего пространственную параллельную структуру, состоящую из подвижной платформы 4, связанной с тремя одинаковыми каретками 5, с помощью трех кинематических цепей в виде одинаковых параллелограммов 6, прикрепленных одинаковыми сферическими шарнирами 7. Каретки перемещаются по стойкам двигателями 8, установленными на стойках. Робот также содержит лазерную головку 9, вместе с соплом аппарата для подачи порошка, которые вмонтированы в подвижную рамку двухподвижного механизма шарнира Гука 10. Повороты лазерной головки вокруг взаимно перпендикулярных осей U и W задаются двигателями 11 и 12.
Устройство работает следующим образом.
Для выполнения аддитивных технологий роботу необходимо иметь пять степеней подвижности, которые передаются лазерной головке 9 и подвижной платформе 4. Изделие формируется на подвижной платформе, имеющей три степени подвижности, а именно, тремя линейными перемещениями по координатам х, у, z. Вращательное движение от трех двигателей 8 с помощью шарико-винтовых передач преобразуется в три независимо управляемых линейных перемещений кареток 5, базирующихся на стойках 3, установленных на основании 1. С помощью трех параллелограммов 6, имеющих шарнирное соединение 7, движение кареток передается к подвижной платформе, обеспечивая ей три степени свободы. Лазерная головка обладает двумя степенями подвижности. Это два угловых поворота лазерной головки. Угловые движения лазерной осуществляются двигателя 11 и 12, вокруг двух пересекающихся осей U и W. Двигатель 11 закреплен на неподвижной платформе 2, а двигатель 12 на подвижной рамке двухподвижного механизма шарнира Гука 10. Пространственное перемещение подвижной платформы по заданной траектории и двухподвижного механизма лазерной головки, обеспечивает формирование деталей посредством аддитивной технологии с высокой точностью, обусловленной жесткостью манипуляционной системы в виде дельта-робота и постоянством предельных значений угловых координат механизма ориентации лазерной головки выполненной в виде шарнира Гука.
Использование предложенного робота позволяет расширить его функциональные возможности для изготовления деталей со сложной геометрией, упростить систему управления и получить мобильный промышленный робот для применения лазерных технологий.
| название | год | авторы | номер документа |
|---|---|---|---|
| СТАТИЧЕСКИ СБАЛАНСИРОВАННОЕ МАНИПУЛЯЦИОННОЕ УСТРОЙСТВО ДЛЯ ЛАЗЕРНЫХ ТЕХНОЛОГИЙ | 2024 |
|
RU2829905C1 |
| Промышленный робот для реализации аддитивной технологии | 2019 |
|
RU2736148C1 |
| ПРОСТРАНСТВЕННЫЙ ПАРАЛЛЕЛОГРАММНЫЙ МАНИПУЛЯТОР-ТРИПОД | 2023 |
|
RU2824543C1 |
| ПРОСТРАНСТВЕННЫЙ МЕХАНИЗМ ОТНОСИТЕЛЬНОГО МАНИПУЛИРОВАНИЯ С ДВУХ- И ЧЕТЫРЕХПОДВИЖНЫМ МОДУЛЯМИ ПАРАЛЛЕЛЬНОЙ СТРУКТУРЫ | 2023 |
|
RU2804502C1 |
| ШЕСТИПОДВИЖНОЕ ПРОСТРАНСТВЕННОЕ УСТРОЙСТВО ПАРАЛЛЕЛЬНОЙ СТРУКТУРЫ ОТНОСИТЕЛЬНОГО МАНИПУЛИРОВАНИЯ | 2023 |
|
RU2804666C1 |
| МОДУЛЬНЫЙ МАНИПУЛЯЦИОННЫЙ РОБОТ, ПРЕДНАЗНАЧЕННЫЙ ДЛЯ ИСПОЛЬЗОВАНИЯ В ОБРАЗОВАТЕЛЬНЫХ ЦЕЛЯХ | 2023 |
|
RU2806952C1 |
| МЕХАНИЗМ ПЛАВАЮЩЕГО ШАРНИРНОГО ПАРАЛЛЕЛОГРАММА | 2021 |
|
RU2765387C1 |
| ПЛАТФОРМЕННЫЙ МАНИПУЛЯТОР С ТРЕМЯ СТЕПЕНЯМИ СВОБОДЫ | 2020 |
|
RU2751780C1 |
| ПРОСТРАНСТВЕННО-ПЛОСКИЙ ПЛАТФОРМЕННЫЙ СФЕРИЧЕСКИЙ МАНИПУЛЯТОР | 2021 |
|
RU2781602C1 |
| ПРОСТРАНСТВЕННЫЙ ПАРАЛЛЕЛОГРАММНЫЙ МЕХАНИЗМ МАНИПУЛЯТОРА | 2022 |
|
RU2784764C1 |
Изобретение относится к области машиностроения и может быть использовано в конструкциях промышленных роботов, предназначенных для формирования изделий с применением аддитивных технологий и использованием лазерного излучения. Робот содержит манипуляционное устройство параллельной структуры, основание, подвижную платформу, кинематические пары, линейные приводы и лазерную головку. Манипуляционное устройство параллельной структуры выполнено в виде дельта-робота, состоящего из упомянутой платформы и трех кинематических цепей в виде параллелограммов, прикрепленных с помощью шарниров к основанию и к подвижной платформе. Подвижная платформа выполнена с возможностью формирования на ней деталей и перемещения посредством трех линейных приводов, установленных на стойках основания робота. Лазерная головка вмонтирована в двухподвижный механизм шарнира Гука, который расположен на основании манипуляционного устройства, напротив подвижной платформы, с обеспечением углового перемещения лазерной головки вокруг двух взаимно перпендикулярных осей с помощью двух приводов вращения. В результате повышается точность изготовления изделия и обеспечивается расширение функциональных возможностей робота для изготовления деталей со сложной геометрией. 1 ил.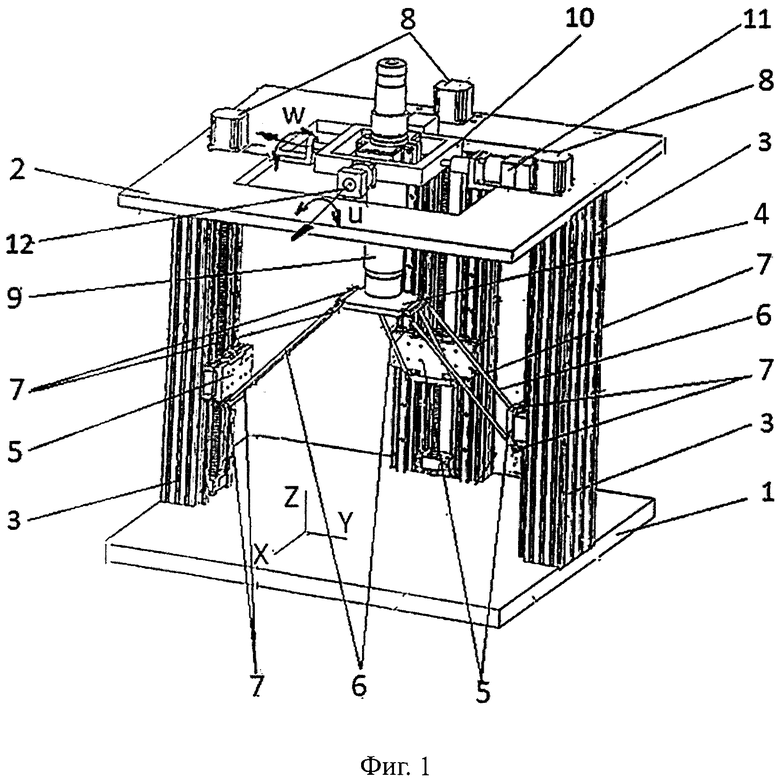
Промышленный пятикоординатный гибридный робот для лазерной технологии, содержащий манипуляционное устройство параллельной структуры, основание, подвижную платформу, кинематические пары, линейные приводы и лазерную головку, отличающийся тем, что манипуляционное устройство параллельной структуры выполнено в виде дельта-робота, состоящего из упомянутой платформы и трех кинематических цепей в виде параллелограммов, прикрепленных с помощью шарниров к основанию и к подвижной платформе, выполненной с возможностью формирования на ней деталей и перемещения посредством трех линейных приводов, установленных на стойках основания робота, при этом лазерная головка вмонтирована в двухподвижный механизм шарнира Гука, который расположен на основании манипуляционного устройства, напротив подвижной платформы, с обеспечением углового перемещения лазерной головки вокруг двух взаимно перпендикулярных осей с помощью двух приводов вращения.
| Промышленный робот для реализации аддитивной технологии | 2019 |
|
RU2736148C1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ МЕТАЛЛИЧЕСКОГО ИЗДЕЛИЯ ЛАЗЕРНЫМ ЦИКЛИЧНЫМ НАНЕСЕНИЕМ ПОРОШКОВОГО МАТЕРИАЛА И УСТАНОВКА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2550670C2 |
| WO 2019083635 A1, 02.05.2019 | |||
| CN 109049701 A, 21.12.2018. | |||

