Изобретение относится к медицинской технике, а именно к средствам управления мехатронными устройствами, такими как экзопротезы конечностей, и может быть использовано при изготовлении таких протезов для конечного пользователя.
Общеизвестно, что наиболее эффективным является протез конечности, максимально адаптированный под индивидуальные потребности конкретного человека, нуждающегося в таком протезе. В свою очередь, на степень такой адаптации прямое влияние оказывают факторы, непосредственно связанные с использованием протеза. Так, в случае, например, протеза нижней конечности на эффективность его использования прямое влияние оказывают походка и связанные с ней профили движения. Таким образом, представляется возможным сделать очевидный вывод о том, что для эффективного управления протезом, (протезами верхних и/или нижних конечностей) необходима информация о действующих на него силовых факторах. В зависимости от приоритетов актуален выбор различных вариантов исполнения соответствующих силомоментных датчиков - от готовых решений с высокой точностью, массой и стоимостью до полностью интегрированной в конструкцию системой тензорезисторов (см, например, https://www.nupoc.northwestern.edu/docs/news/instrumented-componentssag.pdf). Компромиссным решением является выбор расположения силомоментных датчиков в соответствии с заранее определенной моделью нагружения и геометрии изделия.
С учетом сказанного, задача, решаемая при создании заявленного изобретения, состоит в синтезе геометрии, количества и схемы расположения тензорезисторов силомоментного датчика протеза конечностей, при этом технический результат, достигаемый при решении такой задачи, состоит в повышении точности восстановления сил и моментов, действующих на протез, с реализацией модели нагружения, максимально приближенной к паттернам движения человека и удовлетворяющей требованиям по циклической и статической прочности.
Для достижения поставленного результата предлагается способ определения мест расположения тензорезисторов силомоментного датчика экзопротеза конечности, включающий первоначальный выбор значений действующих на экзопротез сил, определение моментов сил и построение матрицы их корреляции; выбор допустимой погрешности измерения восстанавливаемых нагружений, расчетные значения которых обусловлены системой управления экзопротезом; выбор допустимых габаритов силомоментного датчика; выбор допускаемых напряжений и испытательных нагружений, которые должен выдерживать экзопротез; последующее построение на основе полученных данных геометрии несущих элементов силомоментного датчика, построением матрицы откликов для всех возможных комбинаций расположения тензорезисторов с учетом скалирования тестовых нагружений под требования допустимой погрешности измерения восстанавливаемых нагружений и определение для полученной геометрии силомоментного датчика количества и схемы расположения тензорезисторов.
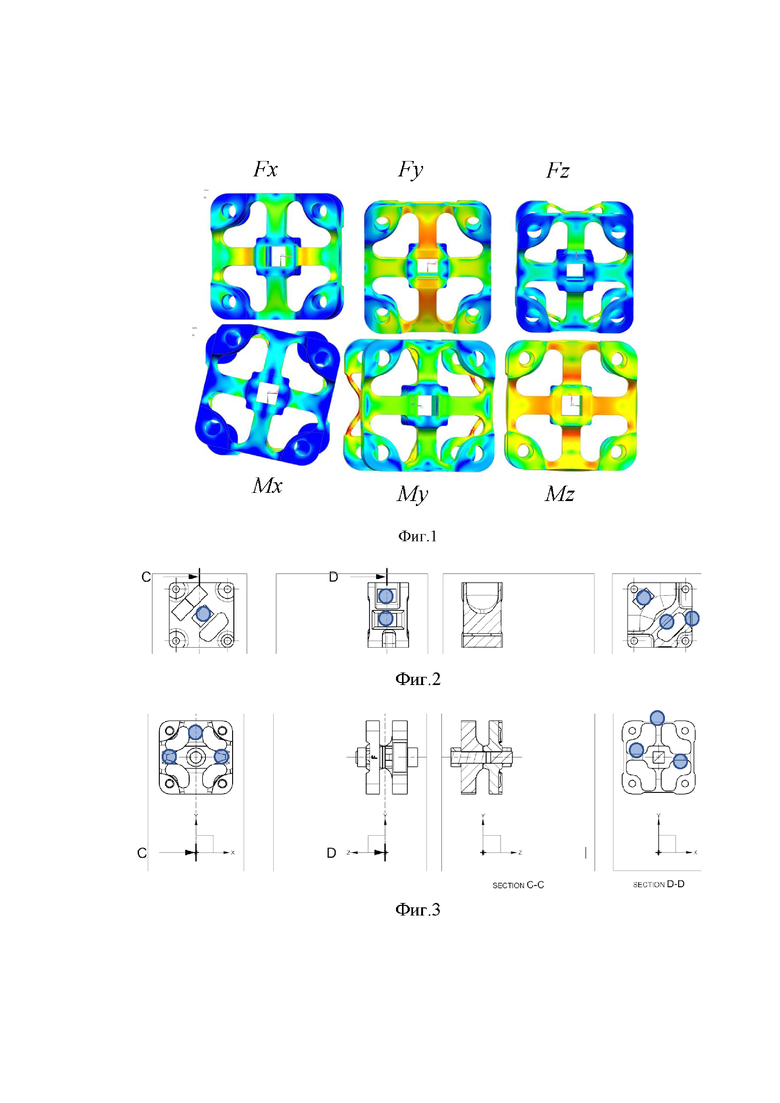
Сущность изобретения поясняется с учетом фиг.1, на которой показан отклик конструкции на действие модели нагружения в рамках итерации оптимизации параметров конструкции, а также фиг.2, 3 с вариантами конструкции датчика, полученными согласно заявленному способу без и с ограничениями на симметрию, соответственно.
Идеология заявленного способа состоит в том, что синтез рациональной геометрии датчика реализуется как градиентный поиск максимума целевой функции минимального сингулярного значения матрицы откликов на действие модели нагружения при ограничениях на напряжения в конструкции.
В вариантах практической реализации заявленного способа (геометрия, количество и схема расположения тензорезисторов силомоментного датчика экзопротеза конечностей) использует следующие исходные данные:
модель нагружения экзопротеза, а именно описание значений действующих сил, моментов сил, и их матрица корреляции; выбор оптимальных параметров (размеров элементов) геометрии несущих элементов силомоментного датчика осуществляется путем решения оптимизационной задачи градиентным методом по критерию максимизации минимального сингулярного значения матрицы откликов при ограничении на максимальное значение эквивалентных напряжений по Мизесу на уровне предела пропорциональности для выбранного материала несущего элемента, допустимых габаритах силомоментного датчика и условии на симметрию конструкции; например, для случая проектирования протеза колена с микропроцессорным управлением модель нагружения строится на основе записей трех сил и трёх моментов на стенде-протезе референтным силомоментным датчиком при реализации характерных паттернов ходьбы;
допустимая погрешность измерения восстанавливаемых нагружений, расчетные значения которых обусловлены системой управления экзопротезом;
допустимые габариты силомоментного датчика;
конструкция соединительных элементов силомоментного датчика с прочими элементами экзопротеза;
требования по допускаемым напряжениям и описание испытательных нагружений, которые должен выдерживать экзопротез.
Определение количества и синтез схемы расположения тензорезисторов для полученной геометрии силомоментного датчика осуществляется построением матрицы откликов для всех возможных комбинаций расположения тензорезисторов с учетом скалирования тестовых нагружений под требования допустимой погрешности измерения восстанавливаемых нагружений.
При неполном базисе восстанавливаемых нагружений матрица откликов определяется как AT(AAT+BBT)-1, где A - матрица откликов на восстанавливаемые нагружения, В - матрица откликов на дополнение к базису восстанавливаемых нагружений. Матрица откликов строится на основе решения линейной статической задачи при действии модели нагружения. Синтез силомоментного датчика экзопротеза конечности человека позволяет посредством измерения упругих деформаций материала датчика с помощью конечного числа тензорезисторов определять базис нагружения в декартовой системе координат, связанной с датчиком. В общем случае полный базис нагружения состоит из 3-х сил Fx, Fy, Fz в направлении осей координат и 3-х моментов сил Мх, Мy, Mz вокруг осей координат, характерных, например, для походки человека,
Методом сингулярного разложения матрицы откликов производится ортогонализация модели нагружения по критерию ортогональности откликов на соответствующие нагружения. Места расположения тензорезисторов определяются в местах максимумов по модулю сингулярных форм матрицы откликов - см. пример откликов на действие сил и моментов на фиг.1. Синтезированный силомоментный датчик экзопротеза, состоящий из системы тензорезисторов, расположенных в определенных местах, и параметров геометрии, обладает свойством оптимальности по признаку соотношения точностей восстановления сил и моментов при минимальной массе при реализации модели нагружения близкой к паттерну походки человека и удовлетворяет требованиям по циклической и статической прочности.
В зависимости от допустимых габаритов силомоментного датчика и условий на симметрию существует возможность синтеза различных вариантов исполнения конструкции датчика. Способ позволяет определить множество варьируемых параметров геометрии конструкции и множество потенциальных мест установки тензорезисторов с учетом их габаритов (размеров), требований монтажа (плоскостность области монтажа тензорезистора), технологичности (доступность для монтажа тензорезистора и его выводов). Примеры варианты конструкции датчика с выбранными местами расположения тензорезисторов представлены на фиг.2, 3 для условий ограничения по симметрии относительно осей X, Y и без него, соответственно.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ПРОТЕЗОМ НИЖНЕЙ КОНЕЧНОСТИ | 2023 |
|
RU2834153C1 |
| СПОСОБ ИЗМЕРЕНИЯ ТРЁХ КОМПОНЕНТОВ НАГРУЗКИ В СЕЧЕНИИ РЕЛЬСА ПРИ КОНТАКТНОМ ВЗАИМОДЕЙСТВИИ С КОЛЕСОМ ЖЕЛЕЗНОДОРОЖНОГО ПОДВИЖНОГО СОСТАВА | 2016 |
|
RU2623665C1 |
| СПОСОБ БЕСПЛАТФОРМЕННОЙ ИНЕРЦИАЛЬНОЙ НАВИГАЦИИ | 2022 |
|
RU2806707C1 |
| Устройство для изучения влияния адгезивов на ретенцию протезов | 1985 |
|
SU1409223A1 |
| Способ автономной ориентации объектов в околоземном пространстве | 2022 |
|
RU2787971C1 |
| СПОСОБ АВТОНОМНОЙ ИНЕРЦИАЛЬНОЙ ОРИЕНТАЦИИ ПОДВИЖНЫХ ОБЪЕКТОВ | 2022 |
|
RU2800846C1 |
| Способ управления космическим аппаратом дистанционного зондирования Земли | 2019 |
|
RU2722598C1 |
| СПОСОБ, УСТРОЙСТВО И УПРАВЛЯЮЩЕЕ УСТРОЙСТВО ДЛЯ САМОАДАПТИВНОЙ КОМПЕНСАЦИИ СИЛЫ ТЯЖЕСТИ МАНИПУЛЯТОРА C НЕСКОЛЬКИМИ НАГРУЗКАМИ | 2020 |
|
RU2813435C1 |
| СИСТЕМА И СПОСОБ ИЗГОТОВЛЕНИЯ | 2000 |
|
RU2305864C2 |
| СПОСОБ УПРАВЛЕНИЯ КИНЕТИЧЕСКИМ МОМЕНТОМ КОСМИЧЕСКОГО АППАРАТА С ПОМОЩЬЮ РЕАКТИВНЫХ ИСПОЛНИТЕЛЬНЫХ ОРГАНОВ | 2003 |
|
RU2253596C2 |
Изобретение относится к медицинской технике, а именно к средствам управления мехатронными устройствами, такими как экзопротезы конечностей. Способ определения мест расположения тензорезисторов силомоментного датчика экзопротеза конечности, в котором выбирают значения действующих на экзопротез сил, определяют моменты сил и строят матрицы их корреляции. Выбирают допустимую погрешность измерения восстанавливаемых нагружений, расчетные значения которых обусловлены системой управления экзопротезом. Выбирают допустимые габариты силомоментного датчика. Выбирают допускаемые напряжения и испытательные нагружения, которые должен выдерживать экзопротез. Затем строят на основе полученных данных геометрию несущих элементов силомоментного датчика, строят матрицы откликов для всех возможных комбинаций расположения тензорезисторов с учетом скалирования тестовых нагружений под требования допустимой погрешности измерения восстанавливаемых нагружений и определяют для полученной геометрии силомоментного датчика количество и схему расположения тензорезисторов. Затем посредством тензорезисторов измеряют упругие деформации материала датчика и определяют базис нагружения в декартовой системе координат, связанной с датчиком. Базис нагружения состоит из трех сил Fx, Fy, Fz в направлении осей координат и трех моментов сил Mx, My, Mz вокруг осей координат. Техническим результатом является повышение точности восстановления сил и моментов, действующих на протез, с реализацией модели нагружения, максимально приближенной к паттернам движения человека и удовлетворяющей требованиям по циклической и статической прочности. 3 ил.
Способ определения мест расположения тензорезисторов силомоментного датчика экзопротеза конечности, в котором выбирают значения действующих на экзопротез сил, определяют моменты сил и строят матрицы их корреляции; выбирают допустимую погрешность измерения восстанавливаемых нагружений, расчетные значения которых обусловлены системой управления экзопротезом; выбирают допустимые габариты силомоментного датчика; выбирают допускаемые напряжения и испытательные нагружения, которые должен выдерживать экзопротез; затем строят на основе полученных данных геометрию несущих элементов силомоментного датчика, строят матрицы откликов для всех возможных комбинаций расположения тензорезисторов с учетом скалирования тестовых нагружений под требования допустимой погрешности измерения восстанавливаемых нагружений и определяют для полученной геометрии силомоментного датчика количество и схему расположения тензорезисторов, а затем посредством тензорезисторов измеряют упругие деформации материала датчика и определяют базис нагружения в декартовой системе координат, связанной с датчиком, при этом базис нагружения состоит из трех сил Fx, Fy, Fz в направлении осей координат и трех моментов сил Mx, My, Mz вокруг осей координат.
| СЕНСОРНОЕ УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УСИЛИЙ И/ИЛИ МОМЕНТОВ И ЕГО ПРИМЕНЕНИЕ | 2006 |
|
RU2391944C2 |
| US 11666463 B2, 06.06.2023 | |||
| US 10792169 B2, 06.10.2020 | |||
| Способ и комплекс бионического управления техническими устройствами | 2020 |
|
RU2756162C1 |
| US 20200237530 A1, 30.07.2020. | |||

