Изобретение относится к машиностроению и может найти применение в робототехнике (для создания механизмов параллельной структуры), в строительстве (для создания подвижных каркасов строительных сооружений), в индустрии складывающейся объемной тары и в радиолокационных устройствах (для создания рефлекторов переменной формы).
Известен шарнирный механизм параллелограмма, содержащий замкнутую кинематическую цепь с вращательными кинематическими парами (А.Ф. Крайнев, Фундаментальный словарь «Механика машин», - М.: «Машиностроение». С. 159, рис. б) - аналог.
Недостатками известного шарнирного механизма параллелограмма являются неработоспособность и избыточная (т.е. не зависящая от приводного двигателя) подвижность механизма в особых (крайних) положениях, когда шарнирный механизм становится неуправляемым и может самопроизвольно переходить из параллелограмма (с вращением ведущего и ведомого кривошипов в одну сторону) в анти-параллелограмм (с вращением этих кривошипов, наоборот, в разные стороны).
Наиболее близким, по технической сущности и достигаемому эффекту, к предлагаемому изобретению является многоконтурный шарнирный механизм, содержащий шарнирно-сочлененные между собой звенья, образующие замкнутую кинематическую по периферии которой расположены три шарнирных четырехзвенника с одной общей вершиной М, лежащей на общей линии, соединяющей центры шарниров каждого из трехшарнирных шатунов всех параллелограммов (Крайнев А.Ф. Словарь-справочник по механизмам. Издание второе. - М.: «Машиностроение», 1987. С. 385, рис. а) - прототип.
Недостатками указанного многоконтурного шарнирного механизма являются:
1. Сложность конструкции и трудоемкость точного изготовления сложных трехшарнирных звеньев, применяемых в качестве шатунов в замкнутой кинематической цепи.
2. Большие габариты и сложность сборки замкнутых контуров механизма с избыточными связями (в количестве q≥1) его звеньев.
3. Данный шарнирный механизм содержит вредные избыточные связи звеньев (повышающие трение в кинематических парах и поэтому снижающие срок службы механизма из-за износа), так как указанный 10-звенный механизм  с pv=14 вращательными кинематическими парами согласно (классической в механике машин) формуле Чебышева вообще имеет отрицательную подвижность (W<0) и поэтому является неработоспособным:
с pv=14 вращательными кинематическими парами согласно (классической в механике машин) формуле Чебышева вообще имеет отрицательную подвижность (W<0) и поэтому является неработоспособным:

Следовательно, данная многоконтурная замкнутая кинематическая цепь указанного механизма (по сравнению с нормальным механизмом, где W2=1) содержит следующее количество вредных избыточных связей (q), равное:

В основу изобретения положена техническая задача, заключающаяся в создании работоспособного многоконтурного шарнирного механизма без вредных избыточных связей (q=0), упрощении его конструкции, снижении трудоемкости его изготовления и сборки, а также уменьшении его габаритов.
Получение технического результата достигается за счет того, что предлагаемый многоконтурный шарнирный VIP-механизм содержит замкнутую кинематическую цепь, которая составлена из установленных один внутри другого шарнирных параллелограммов, вершины которых попарно соединены между собой через двухшарнирные звенья посредством многократных, например, двойных шарниров, составленных из вращательных кинематических пар с параллельными осями вращения таким образом, что вся собираемая в замкнутые контуры кинематическая цепь состоит только из простых двухшарнирных звеньев и только из многократных соединяющих их шарниров с параллельными между собой осями их углового поворота.
Сущность изобретения поясняется чертежами на фиг. 1, фиг. 2, фиг. 3, фиг. 4 и фиг. 5.
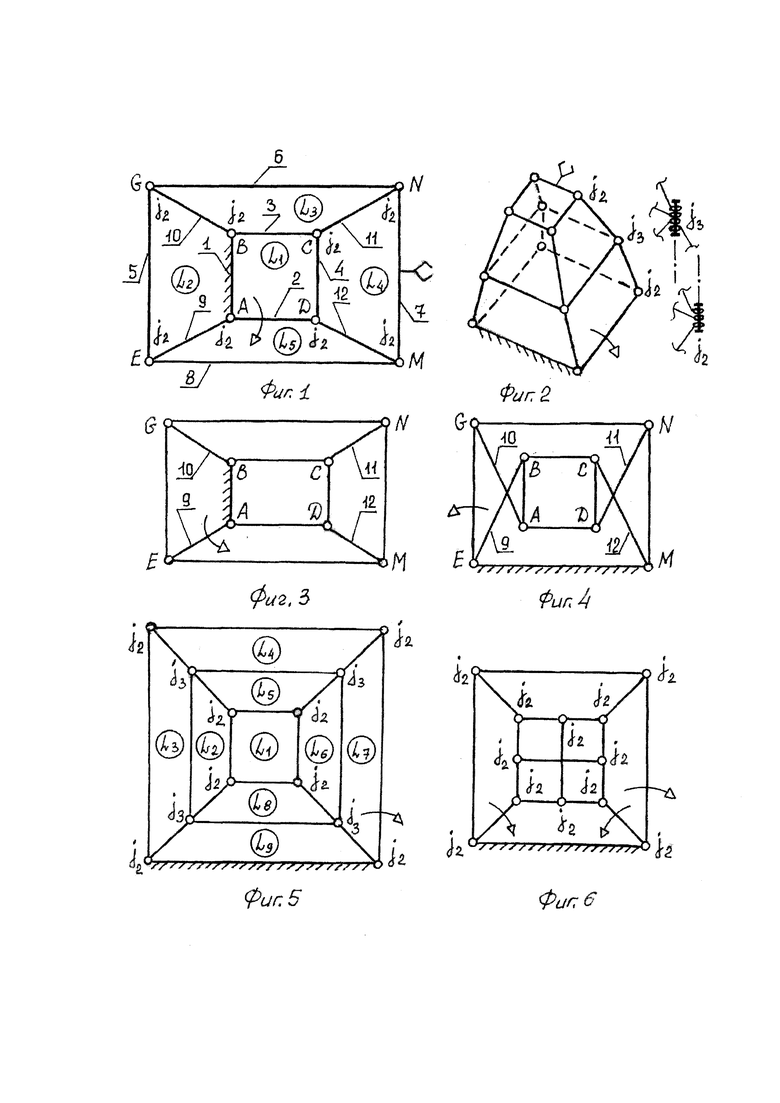
На фиг. 1 изображен общий вид многоконтурного шарнирного VIP-механизма, содержащего шарнирно-сочлененные между собой звенья, образующие замкнутую кинематическую цепь, которая составлена из установленных один внутри другого параллелограммов ABCD (поставлен из звеньев 1, 2, 3 и 4) и EGNM (составлен из звеньев 5, 6, 7 и 8), вершины которых (А и Е, В и G, С и N, D и М) попарно соединены между собой через двушарнирные звенья 9, 10, 11 и 12 посредством многократных, например, двойных шарниров (обозначены «j2»), составленные их вращательных кинематических пар таким образом, что вся собираемая в замкнутые контуры (обозначены 1, 2, 3, 4, 5, 6, 7, 8, 9, 10, 11 и 12) и только из установленных на всех вершинах параллелограммов ABCD и EGNM многократных соединяющих их шарниров А, В, С, D, Е, G, N и М с параллельными между собой осями их углового поворота.
Для представленного на фиг. 1 варианта выполнения шарнирного механизма со стойкой ЕМ и ведущим звеном EG, замкнутая кинематическая цепь которого состоит из 12 звеньев ( включая стойку), 16 вращательных кинематических пар pv=16 (по 2 пары на каждой из 8 вершин А, В, С, D, Е, G, N, М) согласно формуле Чебышева можно установить его заданную положительную подвижность:
включая стойку), 16 вращательных кинематических пар pv=16 (по 2 пары на каждой из 8 вершин А, В, С, D, Е, G, N, М) согласно формуле Чебышева можно установить его заданную положительную подвижность:

Таким образом, представленный на фиг. 1 многоконтурный шарнирный механизм, имеющий W=+1, является вполне работоспособным и не содержит вредных избыточных связей (q=0).
На фиг. 2 представлен вариант сборки замкнутой кинематической цепи пространственного многоконтурного шарнирного VIP-механизма, с параллельными между собой осями углового поворота всех многократных шарниров ( pv=28, W=+1).
pv=28, W=+1).
На фиг. 3 представлен вариант сборки цепи 5-контурного шарнирного VIP-механизма с расположением соединяющих параллелограммы двухшарнирных звеньев 9, 10, 11 и 12 в одной плоскости их сборки в замкнутые контуры и выбором в качестве ведущего соединяющего звена 9.
На фиг. 4 представлен вариант сборки кинематической цепи 5-контурного шарнирного VIP-механизма с соединением вершин параллелограммов ABCD и EGNM через попарно скрещивающиеся двухшарнирные звенья 9 и 10, а также 11 и 12, расположенные в параллельных плоскостях и сборки в замкнутые контуры.
На фиг. 5 представлен вариант сборки 9-контурного шарнирного VIP-механизма (с замкнутыми контурами L1, L2, L3, L4, L5, L6, L7, L8 и L9, состоящего из 20 только двухшарнирных звеньев  соединенных между собой только многократными шарнирами (это 8 двойных шарниров - обозначены «j2» и 4 тройных шарнира - обозначены «j3»), содержащими pv=2*8+3*4=28 вращательных кинематических пар.
соединенных между собой только многократными шарнирами (это 8 двойных шарниров - обозначены «j2» и 4 тройных шарнира - обозначены «j3»), содержащими pv=2*8+3*4=28 вращательных кинематических пар.
Расчет подвижности шарнирного VIP-механизма на фиг. 5 по формуле Чебышева:

также дает положительный результат, который указывает на его полную работоспособность и отсутствие в цепи вредных избыточных связей и неуправляемых подвижностей.
На фиг. 6 представлен вариант сборки 18-звенного  шарнирного VIP-механизма со всеми двойными шарнирами (j2) на основе pv=24 вращательных кинематических пар, который согласно формуле Чебышева:
шарнирного VIP-механизма со всеми двойными шарнирами (j2) на основе pv=24 вращательных кинематических пар, который согласно формуле Чебышева:

имеет увеличенное до W=3 число управляемых степеней свободы.
Работа представленного многоконтурного шарнирного VIP-механизма заключается в следующем.
Поворот относительно стойки ведущего звена 1 VIP-механизма через многократные шарниры преобразуется в различные законы движения всех остальных двухшарнирных звеньев VIP-механизма и обеспечивает широкий диапазон кинематических характеристик, устанавливаемых на эти ведомые звенья рабочих органов (за счет возникающей переменной конфигурации всех замкнутых контуров кинематической цепи).
Достигаемый в предлагаемом многоконтурном шарнирном VIP-механизме положительный эффект заключается в следующем:
1. Упрощение конструкции, снижение трудоемкости изготовления и сборки многоконтурного механизма, а также уменьшение его габаритов за счет выполнения на основе только предельно простых двухшарнирных звеньев.
2. Снижение потерь на трение и увеличение срока службы шарнирного механизма за счет выполнения его замкнутой кинематической цепи без вредных избыточных связей с заданной управляемой во всех положениях подвижностью звеньев при W≥+1.
3. Расширение функциональных возможностей и расширение рабочего пространства движений рабочего органа за счет выполнения VIP-механизма с пространственной замкнутой кинематической цепью (фиг. 2).
| название | год | авторы | номер документа |
|---|---|---|---|
| ПЛАТФОРМЕННЫЙ РОБОТ | 2020 |
|
RU2751778C1 |
| ПЛАТФОРМЕННЫЙ СТЫКОВОЧНЫЙ МАНИПУЛЯТОР | 2020 |
|
RU2751781C1 |
| ШАРНИРНЫЙ КРИВОШИПНЫЙ МЕХАНИЗМ | 2020 |
|
RU2740526C1 |
| ПАУТИННЫЙ ШАРНИРНЫЙ МЕХАНИЗМ | 2024 |
|
RU2830218C1 |
| МЕХАНИЗМ ПЛАВАЮЩЕГО ШАРНИРНОГО ПАРАЛЛЕЛОГРАММА | 2021 |
|
RU2765387C1 |
| СИММЕТРИЧНЫЙ ПЛАТФОРМЕННЫЙ МАНИПУЛЯТОР С ТРЕМЯ СТЕПЕНЯМИ СВОБОДЫ | 2021 |
|
RU2776578C1 |
| ПЛАТФОРМЕННЫЙ МЕХАНИЗМ ОТНОСИТЕЛЬНОГО МАНИПУЛИРОВАНИЯ | 2021 |
|
RU2758391C1 |
| ПАРАЛЛЕЛОГРАММНЫЙ ПРЯМОЛИНЕЙНО-НАПРАВЛЯЮЩИЙ МЕХАНИЗМ | 2021 |
|
RU2769002C1 |
| КОПИРУЮЩИЙ МАНИПУЛЯТОР | 2020 |
|
RU2751779C1 |
| СФЕРИЧЕСКИЙ ПЛАТФОРМЕННЫЙ МАНИПУЛЯТОР-ТРИПОД | 2024 |
|
RU2839627C1 |
Изобретение относится к машиностроению и может быть использовано в манипуляторах параллельной структуры, в области строительства на основе подвижных каркасов и в радиолокационных устройствах с антеннами переменной формы. Многоконтурный шарнирный механизм содержит шарнирно сочлененные между собой звенья, образующие замкнутую кинематическую цепь. Упомянутая кинематическая цепь образована двухшарнирными звеньями, шарнирно сочлененными между собой с образованием установленных один внутри другого шарнирных параллелограммов. Вершины параллелограммов попарно соединены между собой двухшарнирными звеньями и вращательными кинематическими парами с параллельно расположенными осями их углового поворота. В результате обеспечивается упрощение конструкции и снижение трудоемкости изготовления и сборки многоконтурного шарнирного механизма, а также расширение пространства движения рабочего органа. 2 з.п. ф-лы, 6 ил.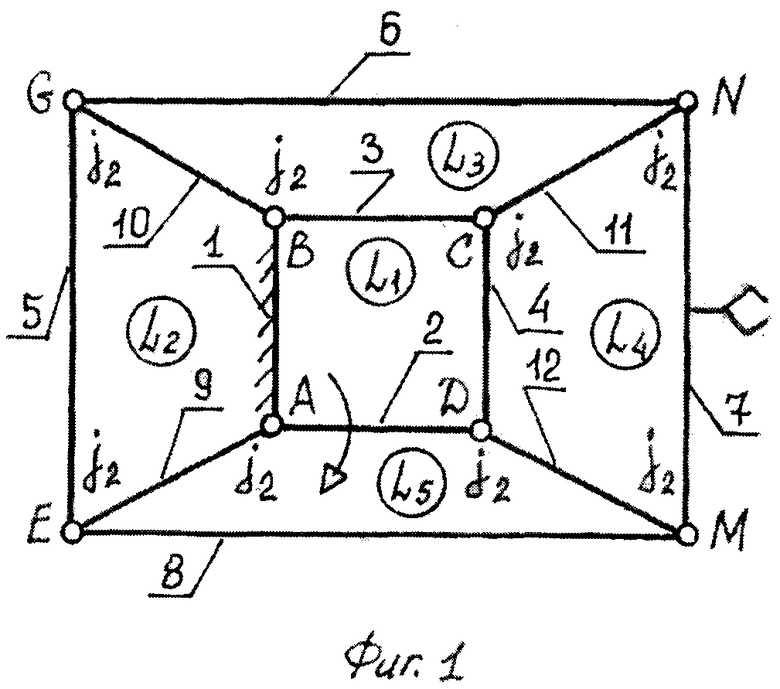
1. Многоконтурный шарнирный механизм, содержащий шарнирно сочлененные между собой звенья, образующие замкнутую кинематическую цепь, отличающийся тем, что замкнутая кинематическая цепь образована двухшарнирными звеньями, шарнирно сочлененными между собой с образованием установленных один внутри другого шарнирных параллелограммов, вершины которых попарно соединены между собой посредством двухшарнирных звеньев и вращательных кинематических пар с параллельно расположенными осями их углового поворота.
2. Механизм по п. 1, отличающийся тем, что двухшарнирные звенья замкнутой кинематической цепи расположены в одной плоскости.
3. Механизм по п. 1, отличающийся тем, что вершины шарнирных параллелограммов попарно соединены между собой посредством попарно скрещивающихся двушарнирных звеньев, расположенных в параллельных плоскостях.
| 0 |
|
SU186575A1 | |
| СКЛАДНОЙ МЕХАНИЗМ С ШЕСТЬЮ СТЕПЕНЯМИ СВОБОДЫ | 2019 |
|
RU2720270C1 |
| ПРОСТРАНСТВЕННЫЙ ПЛАТФОРМЕННЫЙ VIP-МАНИПУЛЯТОР | 2019 |
|
RU2722165C1 |
| 0 |
|
SU191807A1 | |
| Н. Н. Ворожцов-младший; А. Г. Хмельницкий, В. П. Старостини В. А. Коптюг | 0 |
|
SU173729A1 |
| US 4976582 A1, 11.12.1990. | |||

