Изобретение относится к электротехнике, в частности к управлению режимом работы энергосистем по частоте и активной мощности.
Цель изобретения - повышение надежности параллельной работы энергосистем путем повышения качества управления активной мош,ностью гидроагрегатов ГЭС.
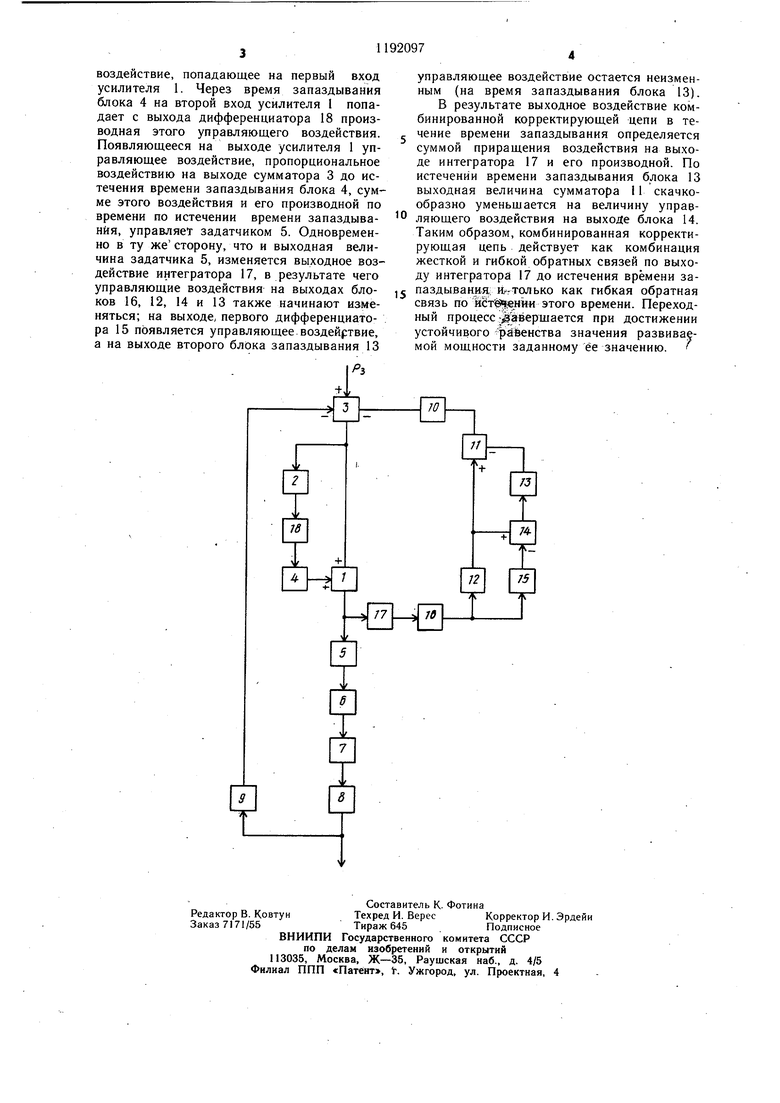
На чертеже приведена функциональная схема устройства.
Устройство содержит суммирующий и управляюш,ий усилитель 1, к первому входу которого так же, как и к входу безинерционного усилителя 2 подключен выход первого сумматора 3, а к второму входу - выход первого блока транспортного запаздывания 4. Усилитель 1 управляет через последовательно соединенные с ним задатчик открытия направляющего аппарата 5, автоматический регулятор частоты вращения 6 и исполнительный орган 7 управления гидротурбиной активной мощностью гидроагрегата 8. К выходу гидроагрегата 8 присоединен преобразующий усилитель 9, с помощью которого к второму входу первого сумматора 3 подводится измерение активной мощности, развиваемой гидроагрегатом 8. Первый вход первого сумматора 3, предназначен для приема заданногогидроагрегату значения мощности, а к третьему его входу присоединен выход второго инерционного усилителя 10, связанного своим входом с выходом третьего сумматора 11. К первому входу суммадора 11 присоединен выход третьего инерционного усилителя 12, а к второму входу сумматора 11 подключен выход второго блока запаздывания 13 таким образом, что выходная величина блока 13 противоположна по знаку выходной величине усилителя 12. Выход последнего соединен, кроме входа сумматора 11, с первым входом второго сумматора 14, выход которого соединен с входом второго блока транспортного запаздывания 13, а второй вход подключен к выходу первого дифференциатора 15 таким образом, что выходная величина этого дифференциатора действует встречно выходной величине усилителя 12. Входы усилителя 12 и дифференциатора 15 объединены и подключены через первый инерционный усилитель 16,к выходу интегратора 17, вход которого подключен к выходу суммирующего и управляющего усилителя 1. Вход первого блока транспортного запаздывания 4 соединен через второй дифференциатор 18 с выходом безинерционного усилителя 2.
В цепь формирования дифференциальной составляющей управляющего воздействия дополнительно введен блок транспортного запаздывания 4. Благодаря вводу этого блока обеспечивается задержка действия этой цепи, предназначенной для повышения быстродействия устройства, на время отклонения мощности, развиваемой гидроагрегатом в направлении, противоположном направлению изменения заданной мощности, и уменьшение этого отклонения, т.е. 5 улучшение формы процесса управления мощностью.
Ввод в . корректирующую цепь блока транспортного запаздывания 13 обеспечивает исключение из суммарного управляющего воздействия, поступающего на вход устройства автоматического управления из обеих цепей обратной связи (главной и корректирующей), компонент, обусловленных транспортным запаздыванием. В этом и заключается компенсация в системах автоматического управления вредного действия транспортного запаздывания в управляемом объекте.
В предлагаемом устройстве полностью исключается вредное влияние на динамику процесса управления транспортного запаздывания управляемого объекта и действия гидроудара.
За счет ввода блоков транспортного запаздывания в предлагаемом устройстве для автоматического управления активной мощностью гидроагрегата обеспечивается возможность достижения высокого быстродействия и улучшения формы процесса управления мощности гидроагрегата как в начальной фазе процесса, в которой проявляется действие гидроудара, так и в последующей его фазе, в которой может возникать перерегулирова ние.
Устройство работает следующим образо.м.
В установившемся режиме при неизменной заданной гидроагрегату мощности Р ,
последняя уравновешена в сумматоре 3 выходной величиной преобразующего усилителя 9, пропорциональной развиваемой гидроагрегатом 8 активной мощности Р. Поскольку при этом управляющее воздействие
0 на выходе сумматора 3 равно нулю, воздействия на обоих входах суммирующего и управляющего усилителя Гтакже равны нулю. Следовательно, равны .нулю и воздействия на выходах блоков 15 и 10. Воздействия на выходах блоков 16, 12, 14, 13 и 11 не равны нулю и определяются значением управляющего воздействия на выходе интегратора 17, которое равно выходной величине задатчика открытия 5, который занимает положение, установившееся по окон0 чании предшествующего переходного режима, в результате чего открытие направляющего аппарата гидротурбины, равное заданному задатчиком 5, соответствует мощности, развиваемой гидроагрегатом.
5 В переходном режиме, возникающем в результате изменения либо заданной, либо развиваемой гидроагрегатом мощности, на выходе сумматора 3 возникает управляющее
воздействие, попадающее на первый вход усилителя 1. Через время запаздывания блока 4 на второй вход усилителя 1 попадает с выхода дифференциатора 18 производная этого управляющего воздействия. Появляющееся на выходе усилителя 1 управляющее воздействие, пропорциональное воздействию на выходе сумматора 3 до истечения времени запаздывания блока 4, сумме этого воздействия и его производной по времени по истечении времени запаздывания, управляет задатчиком 5. Одновременно в ту же сторону, что и выходная величина задатчика 5, изменяется выходное воздействие интегратора 17, в результате чего управляющие воздействия на выходах блоков 16, 12, 14 и 13 также начинают изменяться; на выходе, первого дифференциатора 15 появляется управляющее.воздейртвие, а на выходе второго блока запаздывания 13
/
управляющее воздействие остается неизменным (на время запаздывания блока 13). В результате выходное воздействие комбинированной корректирующей цепи в течение времени запаздывания определяется суммой приращения воздействия на выходе интегратора 17 и его производной. По истечении времени запаздывания блока 13 выходная величина сумматора 11 скачкообразно уменьщается на величину управляющего воздействия на выходе блока 14. Таким образом, комбинированная корректирующая цепь действует как комбинация жесткой и гибкой обратных связей по выходу интегратора 17 до истечения времени запаздыванвд:Иггтолько как гибкая обратная связь по исте енни этого времени. Переходный процесс г аверщается при достижении устойчивого -равенства значения развивае
мои мощности заданному ее значению.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматического управления активной мощностью гидроагрегата низконапорной гидроэлектростанции | 1976 |
|
SU655059A1 |
| Устройство для экстренной разгрузки линии электропередачи при аварийном снижении предела передаваемой мощности | 1982 |
|
SU1083286A1 |
| Устройство для автоматическогоуправления активной мощностью гидро-агрегатами | 1974 |
|
SU509969A1 |
| Устройство для автоматического управления активной мощностью гидроэлектростанции | 1982 |
|
SU1034142A1 |
| Самонастраивающаяся система автоматического управления для объектов с запаздыванием | 1981 |
|
SU1173390A1 |
| Устройство автоматического регулирования толщины полосы на непрерывном прокатном стане | 1987 |
|
SU1435347A1 |
| Устройство для распределения неплановой составляющей заданной мощности в энергосистеме | 1981 |
|
SU1072173A1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ | 2013 |
|
RU2541848C1 |
| Система управления пресс-гранулятором | 1984 |
|
SU1194690A1 |
| Система автоматического управления для объектов с запаздыванием | 1987 |
|
SU1534428A1 |
УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ АКТИВНОЙ МОЩНОСТЬЮ ГИДРОАГРЕГАТА, содержащее последовательно соединенные задатчик открытия направляющего аппарата с электродвигателем, автоматич еский регулятор частоты вращения и исполнительный орган управления гидротурбиной, а также первый сумматор, первый вход которого присоединен к задатчику мощности, второй вход присоединен к выходу преобразующего уси лителя, а выход подключен к входу безинерционного усилителя и к первому входу суммирующего и управляющего усилителя, выход которого соединен непосредственно с входом задатчика открытия направляющего аппарата и через интегратор с входом первого инерционного усилителя, выход которого присоединен к входу первого дифференциатора, второй дифференциатор, вход которого подключен к выходу безинерционного усилителя, и второй инерционный усилигель, выход которого соединен с третьим входом первого сумматора, отличающееся тем, что, с целью повыщения надежности параллельной работы энергосистем путем улучщения качества управления активной мощностью гидроагрегатов, дополнительно введены первый и второй блоки транспортного запаздывания, третий инерционный усилитель и второй и третий сумматоры, при этом вход первого блока транспортного запаздывания подключен к выходу второго дифференциатора, а выход присоединен к i второму входу суммирующего и управляющего усилителя, выход первого инерцион(Л ного усилителя подключен к входу третьего инерционного усилителя, выход которого соединен с первым входом третьего сумматора и с первым выходом второго сумматора, второй вход которого присоединен к выходу первого дифференциатора, а выход подключен к входу второго блока транспортного запаздывания, выход которого присоединен к второму входу третьего сумматора, со tc присоединенного своим выходом к входу второго инерционного усилителя. о со 
| УСТРОЙСТВО для АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ АКТИВНОЙ МОЩНОСТЬЮ ГИДРОАГРЕГАТА | 0 |
|
SU404070A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Авторское свидетельство СССР № 431508, кл | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Устройство для автоматического управления активной мощностью гидроагрегата | 1972 |
|
SU463219A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
