Изобретение относится к теплицам и может быть использовано для производства продукции растениеводства в закрытом грунте по технологии вертикального земледелия.
Известна роботизированная теплица, включающая основание, где вдоль длинных сторон размещены ряды вертикальных опор, которые параллельны друг другу. Сверху рядов вертикальных опор уложены двутавровые продольные балки, таким образом, что нижние полки двутавровых продольных балок опираются на вертикальные опоры, а верхние полки двутавровых продольных балок, дополнительно оснащенные с нижней стороны зубчатыми рейками, находятся на одном уровне. На верхние полки двутавровых продольных балок на роликах установлены опорные тележки, которые оснащены кронштейнами. К кронштейнам закреплены серводвигатели, оснащенные зубчатыми колесами, которые входят в зацепление с зубчатыми рейками. Опорные тележки соединены между собой ограничителями и ходовым винтом, который приводится в движение серводвигателем. Робот включает в себя подвижную платформу, через которую проходят ограничители и ходовой винт. К подвижной платформе в вертикальном положении закреплена электрическая телескопическая штанга, направленная вниз и оснащенная на конце захватывающим устройством. На основании теплицы со стороны одного ряда вертикальных опор размещен продольный транспортер для подачи короба к роботу (см. пат. РФ № 2818343, М.Кл. A01G9/00, 9/14, 9/24, 02.05.2024, бюл. № 13).
Недостатком данной роботизированной теплицы является низкая производственная мощность.
Задача, на решение которой направлено изобретение – повышение производственной мощности роботизированной теплицы без увеличения площади земельного участка под ней.
Для решения этой задачи в роботизированной теплице, содержащей основание, где вдоль длинных сторон размещены ряды вертикальных опор, которые параллельны друг другу, сверху рядов вертикальных опор уложены двутавровые продольные балки, таким образом, что нижние полки двутавровых продольных балок опираются на вертикальные опоры, а верхние полки двутавровых продольных балок, дополнительно оснащенные с нижней стороны зубчатыми рейками, находятся на одном уровне, на верхние полки двутавровых продольных балок на роликах установлены опорные тележки, которые оснащены кронштейнами, где к кронштейнам закреплены серводвигатели, оснащенные зубчатыми колесами, которые входят в зацепление с зубчатыми рейками, при этом опорные тележки соединены между собой ограничителями и ходовым винтом, который приводится в движение серводвигателем; робот включает в себя подвижную платформу, через которую проходят ограничители и ходовой винт, а к подвижной платформе в вертикальном положении закреплена электрическая телескопическая штанга, направленная вниз и оснащенная на конце захватывающим устройством, причем на основании теплицы со стороны одного ряда вертикальных опор размещен продольный транспортер для подачи короба к роботу, согласно изобретению, роботизированная теплица выполнена многоэтажной, где перекрытие нижнего этажа является основанием верхнего этажа, продольные транспортеры, расположенные на этажах, по краям дополнительно снабжены направляющими, при этом по углам роботизированной теплицы со стороны продольных транспортеров в проемах перекрытий вертикально установлены закрытый подающий спиральный транспортер и закрытый принимающий спиральный транспортер; закрытый подающий спиральный транспортер, включающий вертикальную трубчатую опору, транспортерную спираль и спиральную направляющую, соединен с продольными транспортерами подающими промежуточными транспортерами, а закрытый принимающий спиральный транспортер, состоящий из вертикальной трубчатой опоры, транспортерной спирали и спиральной направляющей, соединен с продольными транспортерами принимающими промежуточными транспортерами, причем место соединения закрытого подающего спирального транспортера с подающими промежуточными транспортерами, имеющее разрыв в спиральной направляющей длиной равной ширине подающего промежуточного транспортера, оснащено направляющими рейками, каждая из которых одним концом через шарнир закреплена за спиральную направляющую, а другим концом шарниром соединена со штоком пневмоцилиндра, гильза которого шарниром закреплена за вертикальную трубчатую опору, при этом место соединения закрытого принимающего спирального транспорта с принимающими промежуточными транспортерами, имеющее разрыв в спиральной направляющей длиной равной ширине принимающего промежуточного транспортера, оснащено направляющими рейками, каждая из которых одним концом через шарнир закреплена за спиральную направляющую, а другим концом шарниром соединена со штоком пневмоцилиндра, гильза которого шарниром закреплена за вертикальную трубчатую опору.
Исполнение роботизированной теплицы многоэтажной, где перекрытие нижнего этажа является основанием верхнего этажа, продольные транспортеры, расположенные на этажах, по краям дополнительно снабжен направляющими, при этом по углам роботизированной теплицы со стороны транспортеров в проемах перекрытий вертикально установлены закрытый подающий спиральный транспортер и закрытый принимающий спиральный транспортер; закрытый подающий спиральный транспортер, включающий в себя вертикальную трубчатую опору, транспортерную спираль и спиральную направляющую, соединен с продольными транспортерами подающими промежуточными транспортерами, а закрытый принимающий спиральный транспортер, состоящий из вертикальной трубчатой опоры, транспортерной спирали и спиральной направляющей, соединен с продольными транспортерами принимающими промежуточными транспортерами, причем место соединения закрытого подающего спирального транспортера с подающими промежуточными транспортерами, имеющее разрыв в спиральной направляющей длиной равной ширине подающего промежуточного транспортера, оснащено направляющими рейками, каждая из которых одним концом через шарнир закреплена за спиральную направляющую, а другим концом шарниром соединена со штоком пневмоцилиндра, гильза которого шарниром закреплена за вертикальную трубчатую опору, при этом место соединения закрытого принимающего спирального транспорта с принимающими промежуточными транспортерами, имеющее разрыв в спиральной направляющей длиной равной ширине принимающего промежуточного транспортера, оснащено направляющими рейками, каждая из которых одним концом через шарнир закреплена за спиральную направляющую, а другим концом шарниром соединена со штоком пневмоцилиндра, гильза которого шарниром закреплена за вертикальную трубчатую опору, позволяет организовать на каждом этаже производство продукции, а также перемещать пустые коробы и коробы с продукцией между складами (вспомогательных материалов, продукции) и этажами теплицы, а следовательно увеличивается производственная мощность роботизированной теплицы при неизменной площади земельного участка под теплицей.
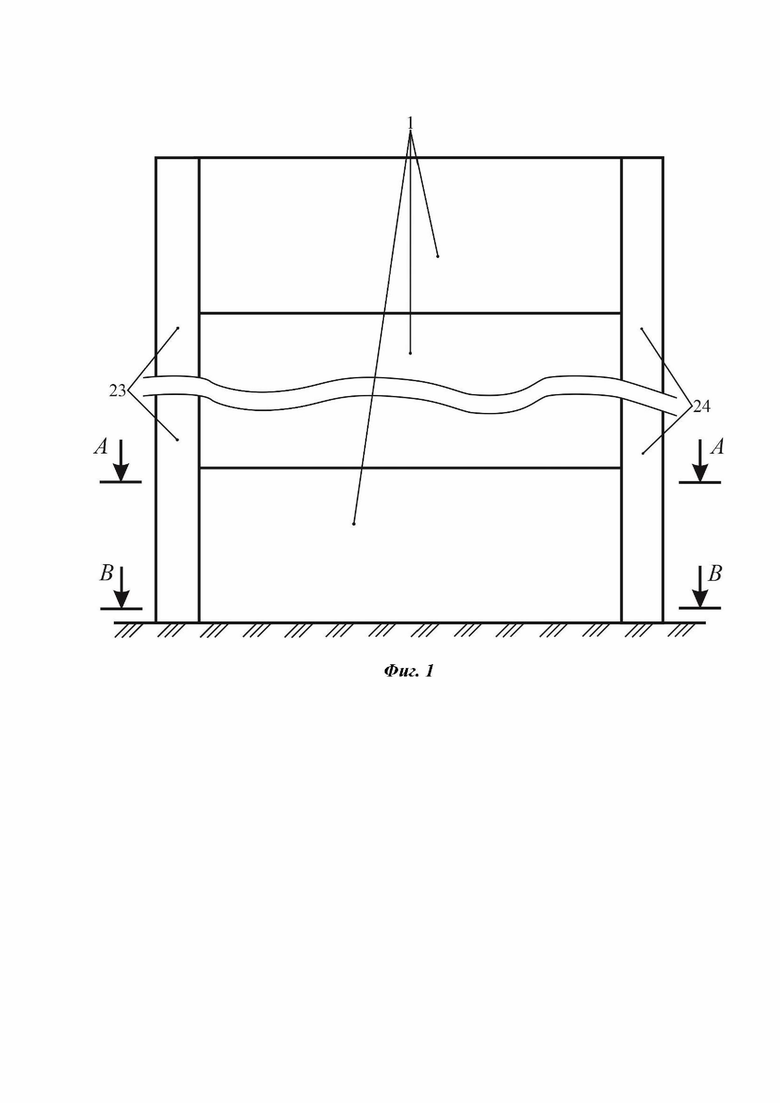
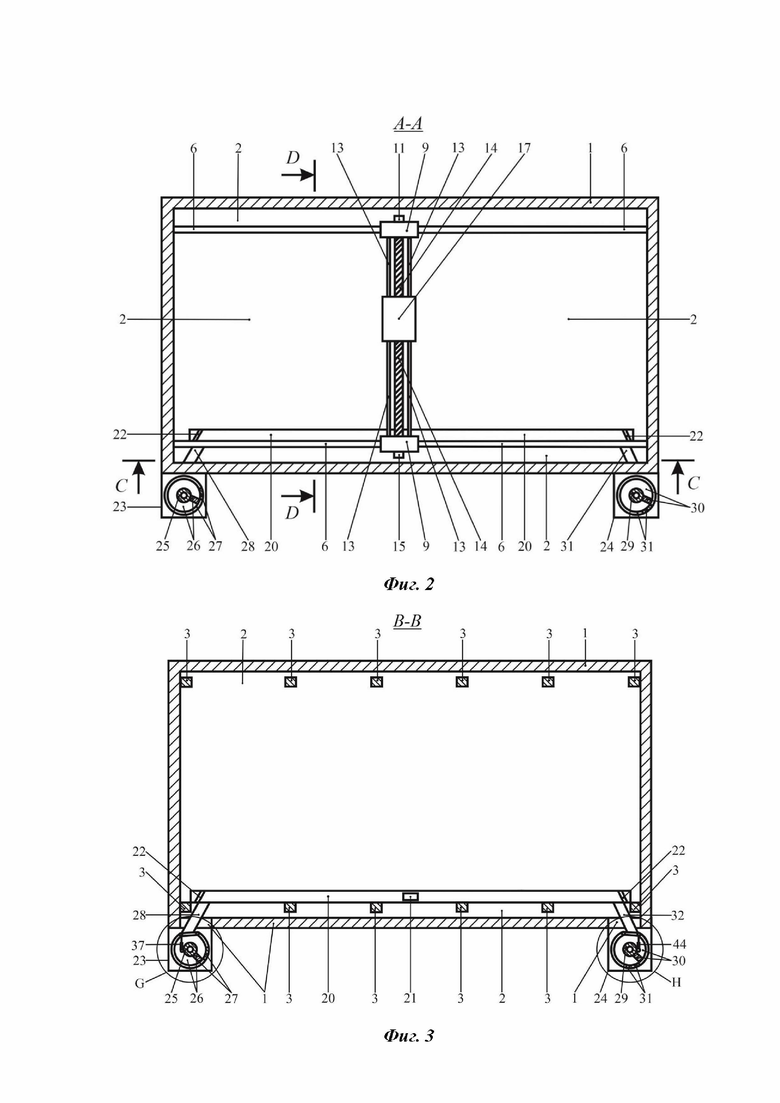
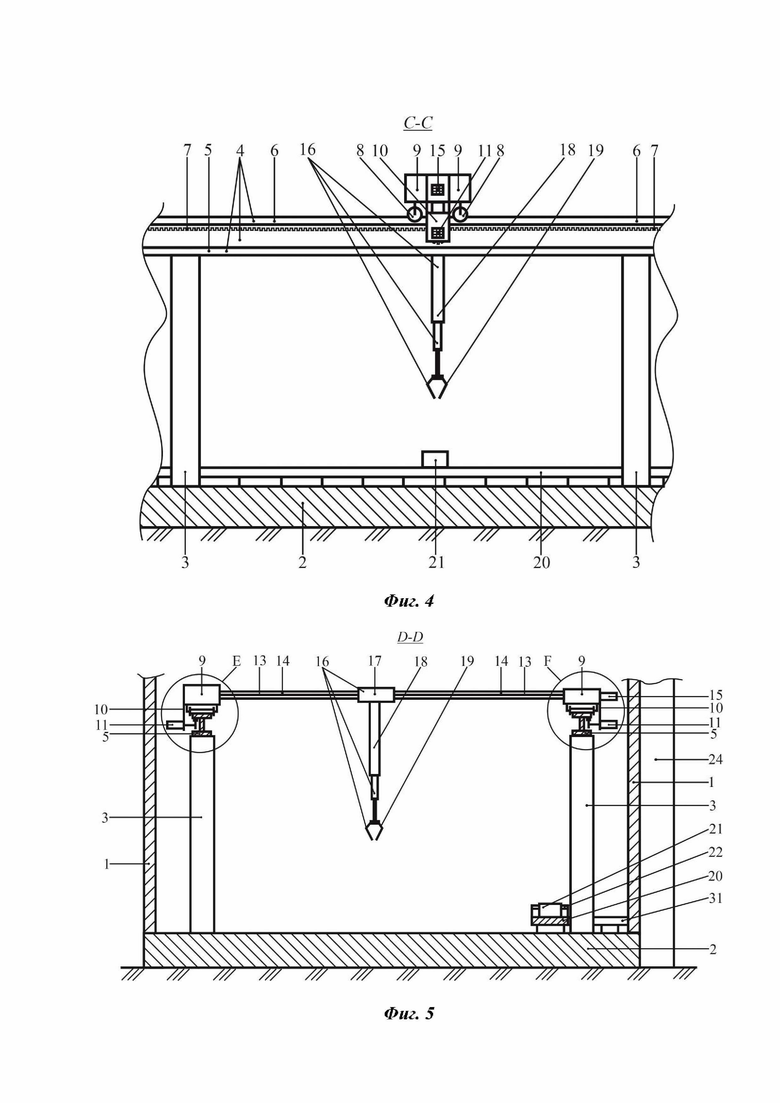
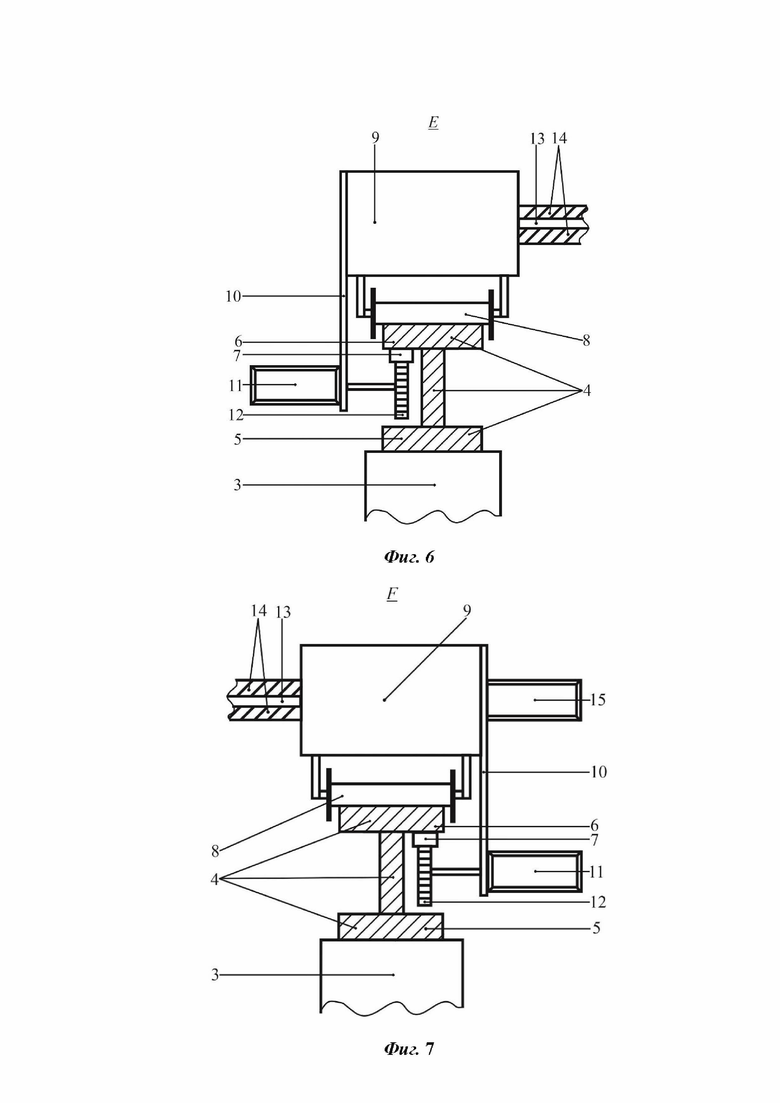
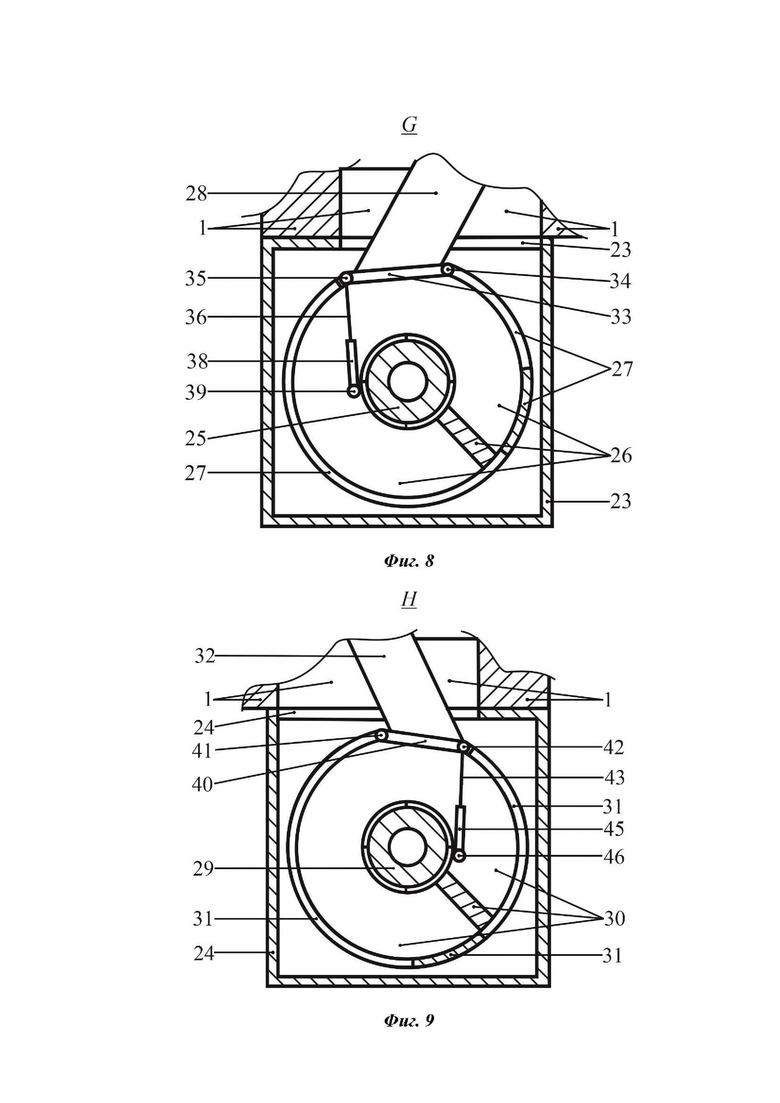
На фиг. 1 показана роботизированная теплица, вид с боку; на фиг. 2 – разрез А–А на фиг. 1; на фиг. 3 – разрез В–В на фиг. 1; на фиг. 4 – разрез С–С на фиг. 2; на фиг. 5 – разрез D–D на фиг. 2; на фиг. 6 – позиция Е на фиг. 5; на фиг. 7 – позиция F на фиг. 5; на фиг. 8 – позиция G на фиг. 3; на фиг. 9 – позиция H на фиг. 3.
Роботизированная теплица включает несколько этажей 1. Каждый этаж 1 содержит основание 2, где вдоль длинных сторон размещены ряды вертикальных опор 3, которые параллельны друг другу. Перекрытие нижнего этажа 1 является основанием верхнего этажа 1. Сверху рядов вертикальных опор 3 уложены двутавровые продольные балки 4, таким образом, что нижние полки 5 двутавровых продольных балок 4 опираются на вертикальные опоры 3, а верхние полки 6 двутавровых продольных балок 4, дополнительно оснащенные с нижней стороны зубчатыми рейками 7, находятся на одном уровне. На верхние полки 6 двутавровых продольных балок 4 на роликах 8 установлены опорные тележки 9, которые оснащены кронштейнами 10. К кронштейнам 10 закреплены серводвигатели 11, оснащенные зубчатыми колесами 12, которые входят в зацепление с зубчатыми рейками 7. Опорные тележки 9 соединены между собой ограничителями 13 и ходовым винтом 14, который приводится в движение серводвигателем 15. Робот 16 включает в себя подвижную платформу 17, через которую проходят ограничители 13 и ходовой винт 14. К подвижной платформе 17 в вертикальном положении закреплена электрическая телескопическая штанга 18, направленная вниз и оснащенная на конце захватывающим устройством 19. На основании 2 теплицы со стороны одного ряда вертикальных опор 3 размещен продольный транспортер 20 для подачи короба 21 к роботу 16, где продольный транспортер 20 по краям дополнительно снабжен направляющими 22. По углам роботизированной теплицы со стороны продольных транспортеров 20 в проемах перекрытий вертикально установлены закрытый подающий спиральный транспортер 23 и закрытый принимающий спиральный транспортер 24. Закрытый подающий спиральный транспортер 23, включающий в себя вертикальную трубчатую опору 25, транспортерную спираль 26 и спиральную направляющую 27, соединен с продольными транспортерами 20 подающими промежуточными транспортерами 28. Закрытый принимающий спиральный транспортер 24, состоящий из вертикальной трубчатой опоры 29, транспортерной спирали 30 и спиральной направляющей 31, соединен с продольными транспортерами 20 принимающими промежуточными транспортерами 32. Место соединения закрытого подающего спирального транспортера 23 с подающими промежуточными транспортерами 28, имеющее разрыв в спиральной направляющей 27 длиной равной ширине подающего промежуточного транспортера 28, оснащено направляющими рейками 33, каждая из которых одним концом через шарнир 34 закреплена за спиральную направляющую 27, а другим концом шарниром 35 соединена со штоком 36 пневмоцилиндра 37, гильза 38 которого шарниром 39 закреплена за вертикальную трубчатую опору 25. Место соединения закрытого принимающего спирального транспорта 24 с принимающими промежуточными транспортерами 32, имеющее разрыв в спиральной направляющей 31 длиной равной ширине принимающего промежуточного транспортера 32, оснащено направляющими рейками 40, каждая из которых одним концом через шарнир 41 закреплена за спиральную направляющую 31, а другим концом шарниром 42 соединена со штоком 43 пневмоцилиндра 44, гильза 45 которого шарниром 46 закреплена за вертикальную трубчатую опору 29.
Роботизированная теплица при сборе урожая работает следующим образом. Из склада вспомогательного материала (на рисунках не показан) короб 21 по закрытому подающему спиральному транспортеру 23 по транспортерной спирали 26 поднимается вверх до заданного этажа 1. При достижении коробом 21 заданного этажа 1 оператор подает сигнал устройству управления (на рисунках не показано) пневмоцилиндра 37. Шток 36 втягивается в гильзу 38, направляющая рейка 33 за счет шарниров 34, 35, 39 поворачивается в сторону вертикальной трубчатой опоры 25 и перекрывает транспортерную спираль 26. Короб 21 контактируя с направляющей рейкой 33 разворачивается по направлению подающего промежуточного транспортера 28. В результате этого короб 21 перемещается на подающий промежуточный транспортер 26, где по нему движется к продольному транспортеру 20. Затем направляющая рейка 33 путем выдвижения штока 36 из гильзы 38 пневмоцилиндра 37 устанавливается в исходное положение, а транспортерная спираль 26 становится свободной для движения по ней других коробов 21. При достижении коробом 21 продольного транспортера 20, короб 21 взаимодействует с направляющей 22. В результате этого короб 21 переходит на продольный транспортер 20 и подается к роботу 16 со стороны захватывающего устройства 19. Устройством распознавания изображения (на рисунках не показано) определяется конкретное место расположения объекта урожая. Затем с помощью серводвигателей 11 и серводвигателя 15 осуществляется соответственно продольное и поперечное перемещения робота 16 к месту расположения объекта урожая. Определенное место расположения объекта урожая с помощью устройства распознавания изображения (на рисунках не показано) передается блоку управления робота (на рисунках не показан) в виде координат. Блок управления роботом (на рисунках не показан) запускает в работу серводвигатели 11, в результате этого зубчатые колеса 12, которые входят в зацепление с зубчатыми рейками 7, начинают вращаться, что приводит в движение опорные тележки 9. Опорные тележки 9 на роликах 8 начинают перемещаться по двутавровым продольным балкам 4, где вместе с ними вдоль основания 2 теплицы перемещаются ограничители 13 и ходовые винты 14, на которые подвешен робот 16, до момента установки робота 16 напротив места расположения объекта урожая. Одновременно с этим серводвигателем 15 ходовой винт 14 приводится во вращение, в результате этого при взаимодействии резьбовых отверстий ходового винта 14 и подвижной платформы 17 подвижная платформа 17 начинает перемещаться вдоль ограничителей 13 до момента установки робота 16 над объектом урожая. Таким образом, на основании переданных координат робот 16 перемещается к месту расположения объекта урожая и фиксируется в заданном положении над объектом урожая. После этого посредством электрической телескопической штанги 18 захватывающее устройство 19 с открытыми рычагами наводится на объект урожая, где четыре рычага складываются, и объект урожая захватывается с последующим его отделением от растения. Затем электрическая телескопическая штанга 18 складывается. В результате этого захватывающее устройство 19 с объектом урожая поднимаются на требуемую высоту. Одновременно с этим в работу включаются серводвигатели 11 и серводвигатель 15, которые на основании полученных данных от блока управления роботом (на рисунках не показан) о месте расположения короба 21, устанавливают робот 16 над коробом 21 аналогичным способом как устанавливался робот 16 над объектом урожая. Зафиксировав робота 16 над коробом 21 электрическая телескопическая штанга 18 опускает захватывающее устройство 19 до контакта объекта урожая с твердой поверхностью в коробе 21. В результате этого объект урожая укладывается в короб 21, а рычаги захватывающего устройства 19 открываются. Уложив объект урожая в короб 21 электрической телескопической штангой 18 захватывающее устройство 19 с открытыми рычагами поднимаются на требуемую высоту. В последующем роботу 16 от блока управления роботом (на рисунках не показан), который получил информацию от устройства распознавания изображения (на рисунках не показано), передаются данные о месте расположения следующих объектов урожая. На основании полученных координат установка робота 16 над местом расположения объекта урожая, сбор объекта урожая роботом 16, установка робота 16 над коробом 21 и укладка объекта урожая в короб 21 выполняются аналогично описанному выше.
После заполнения короба 21 объектами урожая (продукцией) продольный транспортер 20 перемещает короб 21 с продукцией до принимающего промежуточного транспортера 32. При взаимодействии короба 21 с направляющей 22, он перемещается на принимающий промежуточный транспортер 32, по которому поступает к закрытому принимающему спиральному транспортеру 24. Предварительно оператор подает сигнал устройству управления (на рисунках не показано) пневмоцилиндра 44. Происходит втягивание штока 43 в гильзу 45 пневмоцилиндра 44, направляющая рейка 40 за счет шарниров 41, 42, 46 поворачивается в сторону вертикальной трубчатой опоры 29 и перекрывает транспортерную спираль 30. При достижении коробом 21 принимающего спирального транспортера 24, он взаимодействует с направляющей рейкой 40 и разворачиваются по направлению движения транспортерной спирали 30. После этого направляющая рейка 40 выдвижением штока 43 из гильзы 45 пневмоцилиндра 44 устанавливается в исходное положение, а транспортерная спираль 30 становится свободной для движения по ней других коробов 21. Закрытый принимающий спиральный транспортер 24 отправляет короб 21 с продукцией на склад продукции (на рисунках не показан).
Использование данной роботизированной теплицы позволит увеличить производство продукции растениеводства в защищенном грунте по технологии вертикального земледелия.
| название | год | авторы | номер документа |
|---|---|---|---|
| Роботизированная теплица | 2023 |
|
RU2818343C1 |
| СУШИЛКА РОЛИКОВАЯ СЕКЦИОННАЯ С СОПЛОВЫМИ КОРОБАМИ, ПРИВОДОМ И МЕХАНИЗМАМИ ЗАГРУЗКИ И ВЫГРУЗКИ С ЛЕНТОЧНЫМ КОНВЕЙЕРОМ | 2009 |
|
RU2430004C1 |
| УСТРОЙСТВО ДЛЯ ТУШЕНИЯ ПОЖАРА В ПОМЕЩЕНИИ | 2024 |
|
RU2840076C1 |
| Система и способ обследования живой рыбы | 2018 |
|
RU2821412C1 |
| Поточная линия для сборки и сварки металлоконструкций | 1980 |
|
SU939174A1 |
| МОНОРЕЛЬСОВАЯ ТРАНСПОРТНАЯ СИСТЕМА КОНВЕРТИРУЕМОГО ТИПА | 1999 |
|
RU2158211C1 |
| Система обработки живой рыбы и связанные с ней способы | 2018 |
|
RU2745559C1 |
| Переналаживаемая роботизированная система | 1981 |
|
SU998097A1 |
| СПОСОБ УВЕЛИЧЕНИЯ СОПРОТИВЛЯЕМОСТИ ПОДКРАНОВОЙ БАЛКИ ДИНАМИЧЕСКИМ ВОЗДЕЙСТВИЯМ КОЛЕС МОСТОВЫХ КРАНОВ | 2011 |
|
RU2486127C2 |
| РУКАВНАЯ ЛЕНТОЧНАЯ ТРАНСПОРТНАЯ УСТАНОВКА | 1987 |
|
RU2067962C1 |
Изобретение относится к теплицам и может быть использовано для производства продукции растениеводства в закрытом грунте по технологии вертикального земледелия. Роботизированная теплица включает несколько этажей. Каждый этаж содержит основание, где вдоль длинных сторон размещены ряды вертикальных опор, которые параллельны друг другу. Перекрытие нижнего этажа является основанием верхнего этажа. Сверху рядов вертикальных опор уложены двутавровые продольные балки таким образом, что нижние полки двутавровых продольных балок опираются на вертикальные опоры, а верхние полки двутавровых продольных балок, дополнительно оснащенные с нижней стороны зубчатыми рейками, находятся на одном уровне. На верхние полки двутавровых продольных балок на роликах установлены опорные тележки, которые оснащены кронштейнами. К кронштейнам закреплены серводвигатели, оснащенные зубчатыми колесами, которые входят в зацепление с зубчатыми рейками. Опорные тележки соединены между собой ограничителями и ходовым винтом, который приводится в движение серводвигателем. Робот включает в себя подвижную платформу, через которую проходят ограничители и ходовой винт. К подвижной платформе в вертикальном положении закреплена электрическая телескопическая штанга, направленная вниз и оснащенная на конце захватывающим устройством. На основании теплицы со стороны одного ряда вертикальных опор размещен транспортер для подачи короба к роботу. По углам теплицы, со стороны продольных транспортеров, в проемах перекрытий вертикально установлены закрытый подающий спиральный транспортер и закрытый принимающий спиральный транспортер. Оба спиральных транспортера включают в себя вертикальную трубчатую опору, транспортерную спираль и спиральную направляющую. Подающий спиральный транспортер и принимающий спиральный транспортер соединены с продольными транспортерами подающими промежуточными транспортерами. Места соединения подающего спирального транспортера с подающими промежуточными транспортерами и принимающего спирального транспортера с принимающими промежуточными транспортерами имеют разрыв в своей спиральной направляющей и оснащены направляющими рейками, каждая из которых одним концом через шарнир закреплена за свою спиральную направляющую, а другим концом шарниром соединена со штоком своего пневмоцилиндра, гильза которого шарниром закреплена за вертикальную трубчатую опору. Разрыв в каждой из спиральных направляющих выполнен длиной, равной ширине соответствующего ему спирального и промежуточного транспортеров. Изобретение обеспечивает повышение производственной мощности роботизированной теплицы без увеличения площади земельного участка под ней. 9 ил.
Роботизированная теплица, содержащая основание, вдоль длинных сторон которого размещены ряды вертикальных опор, которые параллельны друг другу, при этом сверху рядов вертикальных опор уложены двутавровые продольные балки таким образом, что нижние полки двутавровых продольных балок опираются на вертикальные опоры, а верхние полки двутавровых продольных балок, дополнительно оснащенные с нижней стороны зубчатыми рейками, находятся на одном уровне, причем на верхние полки двутавровых продольных балок на роликах установлены опорные тележки, которые оснащены кронштейнами, к которым закреплены серводвигатели, оснащенные зубчатыми колесами, которые входят в зацепление с зубчатыми рейками, кроме того, опорные тележки соединены между собой ограничителями и ходовым винтом, приводимым в движение серводвигателем, при этом ограничители и ходовой винт проходят через подвижную платформу робота с закрепленной на ней вертикально электрической телескопической штангой, направленной вниз и оснащенной на конце захватывающим устройством, причем на основании теплицы со стороны одного ряда вертикальных опор размещен продольный транспортер для подачи короба к роботу, отличающаяся тем, что роботизированная теплица выполнена многоэтажной, где перекрытие нижнего этажа является основанием верхнего этажа, а продольные транспортеры, расположенные на этажах, по краям дополнительно снабжены направляющими, при этом по углам роботизированной теплицы со стороны продольных транспортеров, в проемах перекрытий, вертикально установлены закрытый подающий спиральный транспортер и закрытый принимающий спиральный транспортер, причем закрытый подающий спиральный транспортер, включающий вертикальную трубчатую опору, транспортерную спираль и спиральную направляющую, соединен с продольными транспортерами подающими промежуточными транспортерами, а закрытый принимающий спиральный транспортер, состоящий из вертикальной трубчатой опоры, транспортерной спирали и спиральной направляющей, соединен с продольными транспортерами принимающими промежуточными транспортерами, кроме того, место соединения закрытого подающего спирального транспортера с подающими промежуточными транспортерами, имеющее разрыв в спиральной направляющей длиной, равной ширине подающего промежуточного транспортера, оснащено направляющими рейками, каждая из которых одним концом через шарнир закреплена за спиральную направляющую, а другим концом шарниром соединена со штоком пневмоцилиндра, гильза которого шарниром закреплена за вертикальную трубчатую опору, при этом место соединения закрытого принимающего спирального транспорта с принимающими промежуточными транспортерами, имеющее разрыв в спиральной направляющей длиной, равной ширине принимающего промежуточного транспортера, оснащено направляющими рейками, каждая из которых одним концом через шарнир закреплена за спиральную направляющую, а другим концом шарниром соединена со штоком пневмоцилиндра, гильза которого шарниром закреплена за вертикальную трубчатую опору.
| Роботизированная теплица | 2023 |
|
RU2818343C1 |
| CN 216492052 U, 01.11.2021 | |||
| JP 11299364 A, 02.11.1999 | |||
| СПОСОБ СНИЖЕНИЯ ОБЛЕДЕНЕНИЯ ПОДЛОЖКИ | 2012 |
|
RU2579065C1 |
| WO 2023148352 A1, 10.08.2023. | |||

