Изобретение относится к судостроению, конкретно к созданию необитаемых подводных аппаратов планирующего типа с повышенной автономностью (подводных планеров), и может быть использовано для увеличения безопасности движения в толще воды.
Одним из существенных ограничений применения подводных планеров в условиях реального моря является частая невозможность выполнения своевременного обнаружения и обхода подводных препятствий. Это обстоятельство напрямую влияет на обеспечение безопасности движения подводного планера.
Известен подводный планер (Zhou M., Bachmayer R., de Young B. Working towards seafloor and underwater iceberg mapping with a Slocum glider //2014 IEEE/OES Autonomous Underwater Vehicles (AUV). – IEEE, 2014. – С. 1-5), содержащий корпус с размещенным на нем эхолотом. В ходе выполнения рабочей миссии подводный планер движется по пилообразной траектории, которая практически всегда происходит со значительными углами дифферента ±20÷30 градусов, в связи с чем диаграмма направленности эхоприбора ориентирована под некоторым углом в пространстве, а не в горизонтальном плоскости или вертикальном направлении относительно дна или поверхности воды. С учетом достаточной узкой диаграммы направленности эхолота возможны случаи, в которых не происходит своевременного обнаружения подводного объекта, а также отсутствует возможность производить непрерывную оценку реальной высоты аппарата над донной поверхностью, что является основным недостатком данного технического решения. Кроме того, недостатком использования эхолотов в составе подводных планеров является то, что они жестко связаны с их корпусом, что не позволяет подводному планеру своевременно обнаружить и совершить обход подводных препятствий.
Известно также техническое решение подводный планер для определения траектории и способ его использования (патент KR № 1019941050000, МПК B63C 11/48, G01S 14/04, G01S 7/52, G05D 1/10, опубл. 28.06.2019 г.). Подводный планер содержит корпус и установленный в его носовой части обтекатель из звукопрозрачного материала. В обтекателе размещен модуль с акустическим датчиком для обнаружения подводного объекта по излученному и принятому акустическому сигналу, при этом модуль с акустическим датчиком установлен на валу подвижного подвеса в горизонтальной плоскости подводного планера. В корпусе размещены модуль регулирования плавучести, датчик плавучести, датчик глубины погружения, датчик угла дифферента. В режиме планирования с заглублением за счет отрицательной плавучести и дифферента на нос заданный угол поворота модуля обнаружения препятствий от продольной оси планера составляет -60 градусов, что обеспечивает излучение акустического сигнала вертикально к донной поверхности. В режиме планирования с всплытием за счет положительной плавучести и дифферента на корму заданный угол поворота модуля обнаружения препятствий от продольной оси планера составляет +60 градусов, что обеспечивает излучение акустического сигнала вертикально к поверхности воды. В режимах горизонтального движения планера под маршевым движителем придонном слое и приповерхностном слое воды заданный угол поворота модуля обнаружения составляет 0°, что обеспечивает излучение акустического сигнала и обнаружение препятствий по ходу движения аппарата. Тем самым обеспечена возможность изменения угла поворота акустического датчика относительно продольной оси аппарата в соответствие с режимом движения подводного планера, за счет которой реализуется корректное измерение или высоты над дном в режиме погружения, или расстояния до препятствий у поверхности воды при всплытии, или обнаружение препятствия в горизонтальной плоскости по ходу движения. Подводный планер реализует возможность ориентировать ось излучения эхолокационного прибора в продольно-вертикальной плоскости аппарата для измерения расстояния над грунтом или обнаружения препятствия, расположенного по курсу движения подводного планера и препятствия над ним. Данное техническое решение является наиболее близким по технической сущности и выбрано за прототип.
Однако известное техническое решение имеет существенный недостаток, который заключаются в том, что при погружении подводного планера невозможно одновременно решить задачи корректной оценки расстояния до поверхности дна вместе с обнаружением препятствий в горизонтальном направлении движения подводного планера, а при всплытии отсутствует возможность одновременной оценки вертикальной дальности до возможных объектов на поверхности моря с обнаружением препятствий в горизонтальном направлении движения. К недостаткам известного устройства следует отнести и то, что для перемещения акустического модуля используется шаговый электродвигатель.
Задачей изобретения является разработка конструкции подводного планера, которая обеспечит безопасность его эксплуатации при одновременном наличии препятствий в толще воды, как по горизонтальному ходу движения, так и в вертикальном направлении в ходе всплытия или заглубления, а также стабилизацию углового положения акустического модуля без использования энергозатратного электропривода.
Сущность изобретения заключается в том, что подводный планер с подвижным акустическим модулем содержит корпус и установленный в его носовой части обтекатель из звукопрозрачного материала, в обтекателе размещен модуль с акустическим датчиком для обнаружения подводного объекта по излученному и принятому акустическому сигналу, при этом модуль с акустическим датчиком установлен на валу подвижного подвеса в горизонтальной плоскости подводного планера, в корпусе размещены модуль регулирования плавучести, датчик плавучести, датчик глубины погружения, датчик угла дифферента. В модуле с акустическим датчиком перпендикулярно валу подвижного подвеса дополнительно установлены верхний и нижний акустические датчики на вертикальной оси под углом 90 градусов относительно оси первого акустического датчика, поплавок, размещенный на вертикальной оси под верхним акустическим датчиком, и груз, размещенный над нижним акустическим датчиком, обеспечивающие модулю с акустическими датчиками стабилизирующий угловое положение в пространстве маятниковый момент, в диапазоне рабочих дифферентов планера первым акустическим датчиком измеряется горизонтальное расстояние до препятствий, расположенных по курсу движения планера на глубине его погружения, нижним акустическим датчиком измеряется вертикальное расстояние до дна или донных предметов и верхним акустическим датчиком измеряется вертикальное расстояние до надводных предметов, расположенных на поверхности воды в направлении перпендикулярном зеркалу воды.
Кроме того, в качестве акустического датчика используется эхолот.
Технический результат изобретения заключается в том, что проводится одновременное оценивание вертикальных дальностей до препятствий как над, так и под подводным планером, а также горизонтальной дальности до препятствий в толще воды по ходу движения подводного планера.
Это стало возможно благодаря дополнительным нижнему и верхнему акустическим датчикам и размещению акустического модуля на подвижном валу, ось вращения которого расположена параллельно поперечной оси аппарата, а также наличию груза, расположенного под осью вращения устройства, и поплавка, расположенного выше оси вращения модуля, которые создают необходимый момент остойчивости.
Предлагаемое техническое устройство позволяет обнаружить потенциально опасные объекты на пути движения подводного планера, оценить расстояние до дна и произвести обследование в предполагаемом районе его всплытия на поверхность с целью дальнейшей коррекции траектории движения и гарантированного обхода обнаруженных препятствий.
На основании изложенного можно заключить, что совокупность существенных признаков заявленного изобретения имеет причинно-следственную связь с достигнутым техническим результатом.
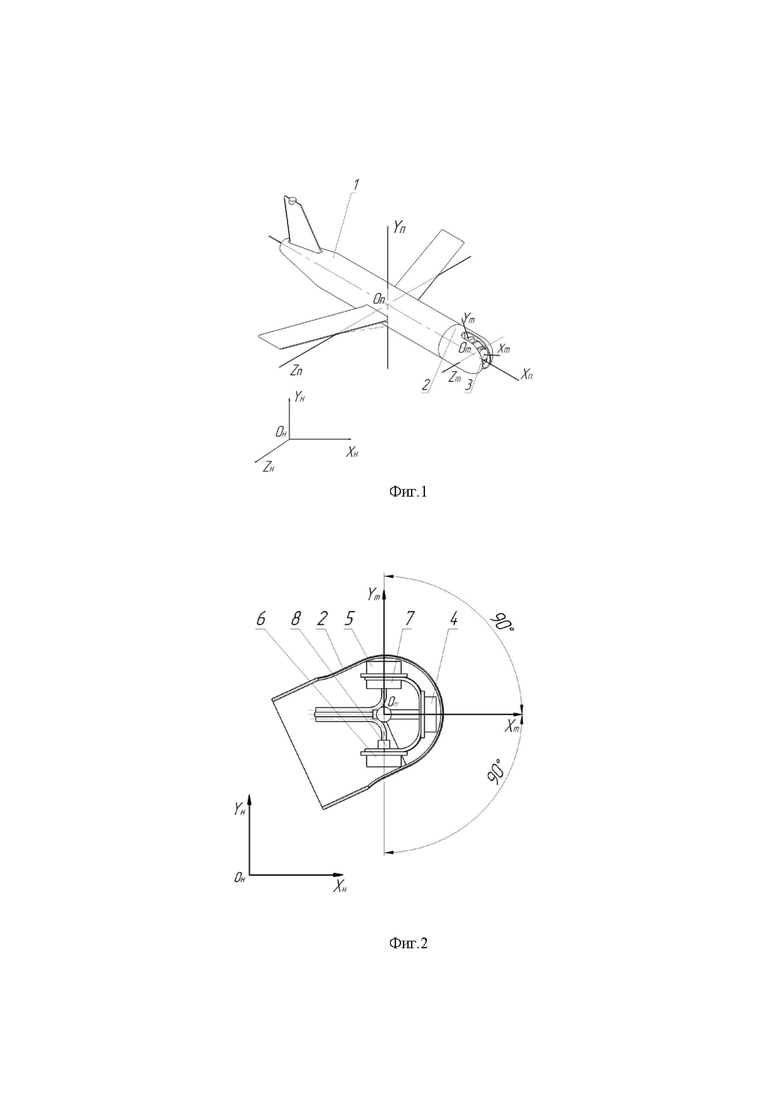
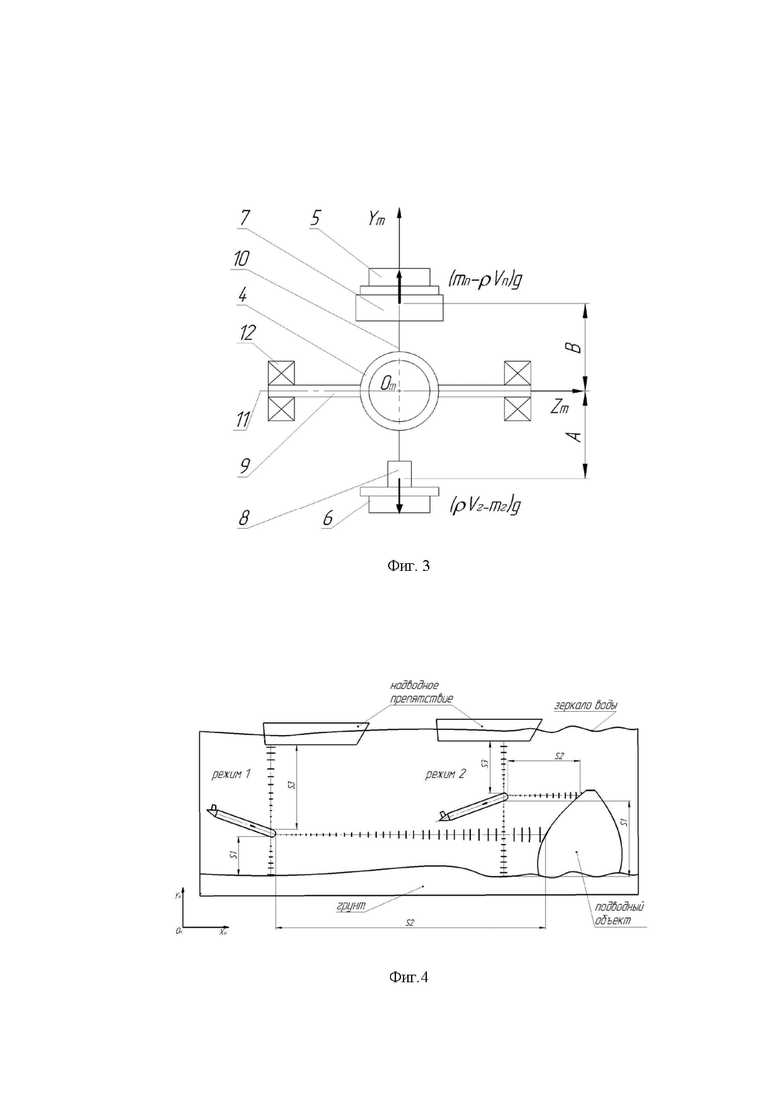
Сущность изобретения поясняется чертежами, где на фиг.1 показано размещение подвижного акустического модуля в составе подводного планера, где OнXнYнZн – неподвижная система; на фиг.2 – состав акустического модуля, где ρ – плотность воды, g – ускорение свободного падения; на фиг.3 - компоновка акустического модуля в обтекателе подводного планера; на фиг. 4 приведена схема работы подвижного акустического модуля при движении подводного планера.
В составе акустического модуля (фиг.2) поплавок с массой mп и объемом Vп расположен выше оси вращения модуля OmZm, а груз с массой mг и объемом Vг расположен ниже этой оси, при этом ось вращения модуля OmZm ориентирована в пространстве параллельно поперечной оси OпZп связанной системы координат подводного планера OпXпYпZп.
В схеме работы (фиг. 4) показаны: режим 1 - погружение с горизонтальным скольжением, режим 2 – всплытие с горизонтальным скольжением, где S1 – фиксируемое минимальное расстояние до дна, S2 – расстояние до подводного препятствия по курсу движения подводного планера и S3 – минимальное расстояние от планера до надводного препятствия.
Заявленный подводный планер с подвижным акустическим модулем содержит корпус 1 и установленный в его носовой части обтекатель 2 из звукопрозрачного материала (фиг. 1). В обтекателе размещен подвижный акустический модуль 3 с первым (горизонтальным) акустическим датчиком 4, верхним акустическим датчиком 5, нижним акустическим датчиком 6, поплавком 7 и грузом 8, который установлен на валу 9 (фиг. 2). В корпусе 1 подводного планера также размещены модуль регулирования плавучести, датчик плавучести, датчик глубины погружения и датчик дифферента (на чертежах не показаны). Верхний акустический датчик 5 и нижний акустический датчик 6 установлены на вертикальной оси 10 под углом 90 градусов относительно оси OmXm горизонтального акустического датчика 4 и оси вращения 11 подвижного акустического модуля 3 (фиг. 3). Поплавок 7, размещенный под верхним акустическим датчиком 5, и груз 8, размещенный над нижним акустическим датчиком 6, обеспечивают подвижному акустическому модулю 3 маятниковый момент, стабилизирующий его угловое положение в пространстве во всем диапазоне рабочих дифферентов подводного планера, за счет чего горизонтальным акустическим датчиком 4 измеряется расстояние S2 до препятствий по курсу движения на глубине его погружения, нижним акустическим датчиком 6 измеряется вертикальное расстояние S1 до дна и придонных предметов, а верхним акустическим датчиком 5 определяется вертикальное расстояние S3 до поверхности воды и препятствий в приповерхностном слое воды (фиг. 4).
Заявленный подводный планер с подвижным акустическим модулем работает следующим образом.
При движении по пилообразной траектории (фиг. 4) подводный планер 1 находится преимущественно в двух положениях: в дифференте на нос при погружении с горизонтальным скольжением (режим 1) или в дифференте на корму при всплытии с горизонтальным скольжением (режим 2). Существуют также незначительные по длительности промежуточные состояния без хода при изменении направления дифферента и знака плавучести. При наклоне подводного планера на некоторый угол дифферента А ось 10 крепления акустических датчиков 5 и 6 продолжает оставаться в вертикальном положении, параллельной вертикальной оси ОнYн неподвижной системы координат благодаря действию на подвижный акустический модуль 3 результирующего стабилизирующего момента остойчивости от силы тяжести груза 8 и силы Архимеда поплавка 7, а также возможности вращения оси 11, установленной в подшипники 12. Ось вращения 11 подвижного акустического модуля 3 ориентирована параллельно поперечной оси ОпZп системы координат, связанной с подводным планером (фиг. 3). Горизонтальная направленность излучения горизонтального акустического датчика 4 обусловлена тем, что его ось ОмXм расположена перпендикулярно оси 10. В результате этого, при движении подводного планера по пилообразной траектории излучение горизонтального акустического датчика 4 всегда будет происходить параллельно плоскости OнXнZн неподвижной системы координат. Излучение верхнего акустического датчика 5 будет направлено по вертикали к поверхности воды (параллельно оси OнYн неподвижной системы координат), а излучение нижнего акустического датчика 6 будет направлено по вертикали ко дну (параллельно оси OнYн неподвижной системы координат).
Заявленное техническое решение позволяет:
- повысить безопасность эксплуатации подводного планера при одновременном наличии препятствий в толще воды, как по горизонтальному ходу движения, так и в вертикальном направлении в ходе всплытия или заглубления;
- обеспечить строгую вертикальную и горизонтальную направленности излучения соответствующих акустических датчиков вне зависимости от углового положения подводного планера по дифференту;
- стабилизировать направленность излучения акустических датчиков за счет восстанавливающего момента, обусловленного наличием груза, расположенного под осью вращения и поплавка, расположенного выше оси вращения акустического модуля.
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОНОМНЫЙ НЕОБИТАЕМЫЙ ПОДВОДНЫЙ АППАРАТ ДЛЯ ИЗМЕРЕНИЯ ДИФФЕРЕНЦИАЛЬНЫХ ХАРАКТЕРИСТИК ВЕКТОРНОГО ЗВУКОВОГО ПОЛЯ | 2017 |
|
RU2664971C1 |
| Подводный планер для локализации источника звука | 2017 |
|
RU2664973C1 |
| Гидроакустический комплекс для обнаружения движущегося подводного источника звука, измерения азимутального угла на источник звука и горизонта источника звука в мелком море | 2018 |
|
RU2687886C1 |
| САМОТРАНСПОРТИРУЮЩАЯСЯ МИНА-ГЛАЙДЕР И СПОСОБ ЕЕ ПОСТАНОВКИ | 2016 |
|
RU2668021C2 |
| Комплекс для осуществления подводных работ | 2022 |
|
RU2785237C1 |
| АВТОНОМНЫЙ НЕОБИТАЕМЫЙ ПОДВОДНО-НАДВОДНЫЙ АППАРАТ ПЛАНЕРНОГО ТИПА | 2024 |
|
RU2831312C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПОПРАВОК К ГЛУБИНАМ, ИЗМЕРЕННЫМ ЭХОЛОТОМ ПРИ СЪЕМКЕ РЕЛЬЕФА ДНА АКВАТОРИИ | 2009 |
|
RU2461021C2 |
| ПОДВОДНЫЙ ПЛАНЕР (ВАРИАНТЫ) | 2012 |
|
RU2490164C1 |
| Подводный планер-глайдер | 2021 |
|
RU2763456C1 |
| Подводный планер-глайдер | 2024 |
|
RU2834250C1 |
Изобретение относится к судостроению, к созданию необитаемых подводных аппаратов планирующего типа с повышенной автономностью. Подводный планер содержит корпус и установленный в его носовой части обтекатель. В обтекателе размещен подвижный акустический модуль с горизонтальным акустическим датчиком, верхним и нижним акустическими датчиками, поплавком и грузом, который установлен на валу. Верхний и нижний акустические датчики установлены на вертикальной оси под углом 90 градусов относительно оси горизонтального акустического датчика и оси вращения подвижного акустического модуля. Поплавок, размещенный под верхним акустическим датчиком, и груз, размещенный над нижним акустическим датчиком, обеспечивают подвижному акустическому модулю маятниковый момент, стабилизирующий его угловое положение в пространстве во всем диапазоне рабочих дифферентов подводного планера. Проводится одновременное оценивание вертикальных дальностей до препятствий как над, так и под подводным планером, а также горизонтальной дальности до препятствий в толще воды по ходу движения планера. Увеличивается безопасность маневрирования в толще воды. 1 з.п. ф-лы, 4 ил.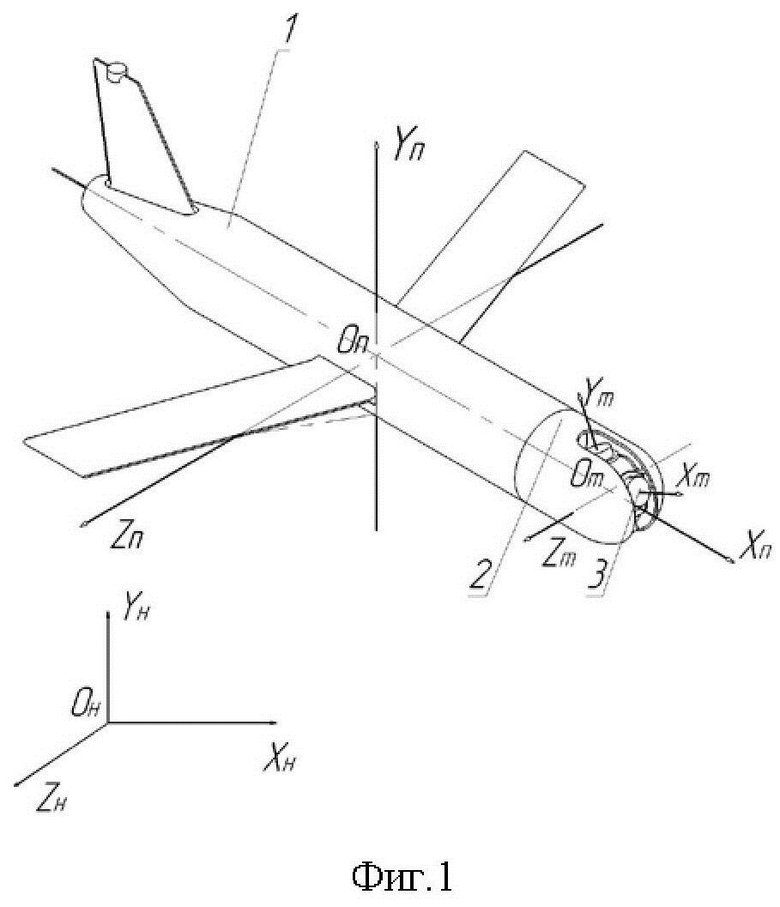
1. Подводный планер с подвижным акустическим модулем, состоящий из корпуса и установленного в его носовой части обтекателя из звукопрозрачного материала, в обтекателе размещен модуль с акустическим датчиком для обнаружения подводного объекта по излученному и принятому акустическому сигналу, при этом модуль с акустическим датчиком установлен на валу подвижного подвеса в горизонтальной плоскости подводного планера, в корпусе размещены модуль регулирования плавучести, датчик плавучести, датчик глубины погружения, датчик угла дифферента, отличающийся тем, что в модуле с акустическим датчиком перпендикулярно валу подвижного подвеса дополнительно установлены верхний и нижний акустические датчики на вертикальной оси под углом 90 градусов относительно оси первого акустического датчика, поплавок, размещенный на вертикальной оси под верхним акустическим датчиком, и груз, размещенный над нижним акустическим датчиком, обеспечивающий модулю с акустическими датчиками стабилизирующий угловое положение в пространстве маятниковый момент, в диапазоне рабочих дифферентов планера первым акустическим датчиком измеряется горизонтальное расстояние до препятствий, расположенных по курсу движения планера на глубине его погружения, нижним акустическим датчиком измеряется вертикальное расстояние до дна или донных предметов и верхним акустическим датчиком измеряется вертикальное расстояние до надводных предметов, расположенных на поверхности воды в направлении, перпендикулярном зеркалу воды.
2. Подводный планер с подвижным акустическим модулем по п. 1, отличающийся тем, что в качестве акустического датчика используется эхолот.
| KR 10194105 B1, 28.06.2019 | |||
| Малогабаритный многофункциональный автономный необитаемый подводный аппарат - носитель сменной полезной нагрузки | 2018 |
|
RU2681415C1 |
| Автономный необитаемый подводный аппарат | 2019 |
|
RU2722258C1 |
| РАСПРЕДЕЛИТЕЛЬНОЕ УСТРОЙСТВО ДЛЯ ЖИДКОСТИ К НАСАДОЧНОМУ КОЛОННОМУ АППАРАТУ | 0 |
|
SU176835A1 |
| CN 106904260 A, 30.06.2017. | |||

