Область техники, к которой относится изобретение
[001] Настоящая технология относится к роботизированным транспортным средствам, в частности, к механизмам управления их крышками.
Уровень техники
[002] Автономные роботизированные транспортные средства представляют собой транспортные средства, способные автономно передвигаться по частным и/или общественным территориям. Используя систему датчиков, которые определяют местоположение и/или распознают пространство вокруг роботизированного транспортного средства, логическая схема, входящая в состав роботизированного транспортного средства или связанная с ним, управляет скоростью и направлением движения роботизированного транспортного средства на основе полученной датчиками информации о местоположении и окружающем пространстве роботизированного транспортного средства.
[003] В роботизированном транспортном средстве могут использоваться разные системы датчиков, например, среди прочего, системы камер, радиолокационные системы и лидарные системы. Те или иные системы датчиков могут применяться для получения различной информации и/или информации в различных форматах о местоположении роботизированного транспортного средства и об окружающем пространстве. Например, лидарные системы могут применяться для сбора данных облака точек с целью построения трехмерных карт окружающего пространства и прочих потенциальных объектов, расположенных рядом с роботизированным транспортным средством.
[004] Такие автономные роботизированные транспортные средства служат для решения разнообразных задач, включая доставку посылок и других грузов. При этом роботизированное транспортное средство может управлять крышкой или дверцей, обеспечивающей закрывание или изолирование пространства, для размещения и/или извлечения доставляемых предметов. В процессе управления крышкой автономное роботизированное транспортное средство не должно допускать движения крышки, способного доставлять неудобства пользователю (например, получателю предметов), вызывать повреждение предметов или повреждение самой крышки либо других элементов роботизированного транспортного средства.
[005] В патентной заявке US2019330910 раскрыт способ управления узлом привода откидной крышки автомобильного транспортного средства с использованием устройства управления.
Раскрытие изобретения
[006] Разработчиками настоящей технологии было разработано устройство для механизма управления крышкой, обеспечивающее управление крышкой роботизированного транспортного средства. Такое устройство обеспечивает беспрепятственное движение крышки роботизированного транспортного средства и ее бесперебойное функционирование.
[007] Разработан способ управления работой крышки. Крышка приводится в движение электродвигателем, ток которого регулируется процессором механизма управления крышкой. В частности, крышка может поворачиваться вокруг оси вращения поворотного вала крышки.
[008] Разработчики настоящей технологии учли, что под действием внешних сил, таких как сила тяжести и ветровая нагрузка, на крышке может возникать крутящий момент, величина которого зависит от углового положения крышки относительно оси вращения. В связи с этим приводное усилие, прикладываемое электродвигателем к крышке, регулируется, исходя из углового положения крышки. В частности, в некоторых вариантах осуществления крышка может поворачиваться между первым угловым положением и вторым угловым положением, одно из которых соответствует закрытому состоянию крышки. В одном из вариантов осуществления угловой диапазон перемещения между первым и вторым угловыми положениями разделен на три части. Направление приводного усилия, создаваемого электродвигателем, изменяется в этих частях таким образом, чтобы значения приводного усилия соответствовали ожидаемым крутящим моментам внешних сил.
[009] Для этого энкодер, связанный с процессором, способен измерять величину перемещения крышки, например, ее угловое положение. На основе информации, предоставляемой энкодером, процессор может изменять знак электрического тока на разных фазах поворота крышки относительно оси вращения.
[010] В некоторых вариантах осуществления процессор на основе информации, предоставляемой энкодером, способен определять, что вращение крышки в текущий момент блокируется или тормозится. Например, если выясняется, что величина перемещения крышки меньше заданного порогового значения, ее вращение признается заблокированным или заторможенным. В результате процессор может изменить ток, поступающий в электродвигатель, чтобы сначала увеличить приводное усилие, создаваемое электродвигателем в направлении поворота крышки относительно оси вращения. Сила электрического тока может регулироваться до тех пор, пока величина перемещения не достигнет заданного порогового значения. Если после достижения порогового значения электрического тока выясняется, что величина перемещения все еще меньше заданного порогового значения, процессор может инициировать экстренное действие. Процессор может регулировать электрический ток, увеличивая или уменьшая его в зависимости от текущей фазы поворота.
[011] В соответствии с первым широким аспектом настоящей технологии реализован способ управления крышкой роботизированного транспортного средства, выполненной с возможностью ее перемещения электродвигателем между открытым и закрытым положениями, обеспечивающей доступ к внутреннему пространству роботизированного транспортного средства в открытом положении и предотвращающей доступ туда в закрытом положении. Когда крышка находится между открытым положением и первым промежуточным положением, заданным между открытым положением и закрытым положением, способ предусматривает подачу в электродвигатель первого электрического тока, имеющего первое значение, для приложения к крышке первого усилия. Когда крышка находится между первым промежуточным положением и вторым промежуточным положением, заданным между первым промежуточным положением и закрытым положением, способ дополнительно предусматривает подачу в электродвигатель второго электрического тока, имеющего второе значение, знак которого противоположен знаку первого значения, для приложения к крышке второго усилия, действующего в направлении, противоположном направлению первого усилия. Когда крышка находится между вторым промежуточным положением и закрытым положением, способ дополнительно предусматривает подачу в электродвигатель третьего электрического тока, имеющего третье значение, знак которого совпадает со знаком первого значения, для приложения к крышке третьего усилия, действующего в направлении, совпадающем с направлением первого усилия.
[012] В некоторых вариантах осуществления способа крышка выполнена с возможностью ее вращения вокруг горизонтальной оси между открытым положением и закрытым положением, а второе усилие прикладывается к крышке с целью частичного уравновешивания силы тяжести, действующей на крышку между первым промежуточным положением и вторым промежуточным положением.
[013] В некоторых вариантах осуществления способа первое и третье значения являются положительными, а второе значение - отрицательным.
[014] В некоторых вариантах осуществления способа первое и третье значения являются отрицательными, а второе значение - положительным.
[015] В некоторых вариантах осуществления способа первое значение меньше третьего значения, а первое усилие меньше третьего усилия.
[016] В некоторых вариантах осуществления способ дополнительно предусматривает запирание крышки в закрытом положении.
[017] В некоторых вариантах осуществления способ дополнительно предусматривает контроль величины перемещения крышки между открытым положением и закрытым положением, повышение первого значения первого электрического тока до увеличенного первого значения, по абсолютной величине превышающего первое значение, для приложения к крышке увеличенного первого усилия, если величина перемещения оказывается меньшей заданной величины перемещения при нахождении крышки между открытым положением и первым промежуточным положением, и инициирование экстренного действия, если увеличенное первое значение оказывается равным первому пороговому значению.
[018] В некоторых вариантах осуществления способ дополнительно предусматривает контроль величины перемещения крышки между открытым положением и закрытым положением, снижение второго значения второго электрического тока до уменьшенного второго значения, абсолютной величине меньшего второго значения, для приложения к крышке уменьшенного второго усилия, если величина перемещения оказывается меньшей заданной величины перемещения при нахождении крышки между первым промежуточным положением и вторым промежуточным положением, и инициирование экстренного действия, если уменьшенное второе значение оказывается равным второму пороговому значению.
[019] В некоторых вариантах осуществления способа инициирование экстренного действия предусматривает подачу в электродвигатель четвертого электрического тока, имеющего четвертое значение, знак которого совпадает со знаком уменьшенного второго значения, а абсолютная величина превышает абсолютную величину второго значения, для приложения к крышке четвертого усилия, действующего в направлении, совпадающем с направлением второго усилия.
[020] В некоторых вариантах осуществления способа инициирование экстренного действия предусматривает установку крышки в открытое положение и ее удержание в этом положении.
[021] В некоторых вариантах осуществления способа инициирование экстренного действия предусматривает фиксацию крышки.
[022] В некоторых вариантах осуществления способа инициирование экстренного действия дополнительно предусматривает изменение второго значения второго электрического тока между номинальным значением и уменьшенным вторым значением заданное количество раз.
[023] В некоторых вариантах осуществления способа крышка в закрытом положении располагается под углом 0 градусов к горизонтальной плоскости.
[024] В некоторых вариантах осуществления способа крышка во втором промежуточном положении располагается под углом 10 градусов к горизонтальной плоскости.
[025] В некоторых вариантах осуществления способа крышка в первом промежуточном положении располагается под углом 50 градусов к горизонтальной плоскости.
[026] В некоторых вариантах осуществления способа крышка в открытом положении располагается под углом 0 градусов к вертикальной плоскости.
[027] В соответствии со вторым широким аспектом настоящей технологии реализовано роботизированное транспортное средство, которое содержит корпус, образующий внутреннее пространство, крышку, выполненную с возможностью управления ею для обеспечения доступа к внутреннему пространству, источник электропитания и процессор, способный управлять работой крышки. Когда крышка находится между открытым положением и первым промежуточным положением, заданным между открытым положением и закрытым положением, процессор способен обеспечивать подачу от источника электропитания в электродвигатель первого электрического тока, имеющего первое значение, для приложения к крышке первого усилия. Когда крышка находится между первым промежуточным положением и вторым промежуточным положением, заданным между первым промежуточным положением и закрытым положением, процессор способен обеспечивать подачу от источника электропитания в электродвигатель второго электрического тока, имеющего второе значение, знак которого противоположен знаку первого значения, для приложения к крышке второго усилия, действующего в направлении, противоположном направлению первого усилия. Когда крышка находится между вторым промежуточным положением и закрытым положением, процессор дополнительно способен обеспечивать подачу от источника электропитания в электродвигатель третьего электрического тока, имеющего третье значение, знак которого совпадает со знаком первого значения, для приложения к крышке третьего усилия, действующего в направлении, совпадающем с направлением первого усилия.
[028] В некоторых вариантах осуществления роботизированного транспортного средства крышка выполнена с возможностью ее вращения вокруг горизонтальной оси между открытым положением и закрытым положением, а второе усилие прикладывается к крышке с целью частичного уравновешивания силы тяжести, действующей на крышку между первым промежуточным положением и вторым промежуточным положением.
[029] В некоторых вариантах осуществления роботизированного транспортного средства первое и третье значения являются положительными, а второе значение - отрицательным.
[030] В некоторых вариантах осуществления роботизированного транспортного средства первое и третье значения являются отрицательными, а второе значение - положительным.
[031] В некоторых вариантах осуществления роботизированного транспортного средства первое значение меньше третьего значения, а первое усилие меньше третьего усилия.
[032] В некоторых вариантах осуществления роботизированного транспортного средства процессор дополнительно способен запирать крышку в закрытом положении.
[033] В некоторых вариантах осуществления роботизированного транспортного средства процессор дополнительно способен контролировать величину перемещения крышки между открытым положением и закрытым положением, при нахождении крышки между открытым положением и первым промежуточным положением повышать первое значение первого электрического тока до увеличенного первого значения, по абсолютной величине превышающего первое значение, для приложения к крышке увеличенного первого усилия, если величина перемещения оказывается меньшей заданной величины перемещения, и инициировать экстренное действие, если увеличенное первое значение оказывается равным первому пороговому значению.
[034] В некоторых вариантах осуществления роботизированного транспортного средства процессор дополнительно способен контролировать величину перемещения крышки между открытым положением и закрытым положением, при нахождении крышки между первым промежуточным положением и вторым промежуточным положением снижать второе значение второго электрического тока до уменьшенного второго значения, по абсолютной величине меньшего второго значения, для приложения к крышке уменьшенного второго усилия, если величина перемещения оказывается меньшей заданной величины перемещения, и инициировать экстренное действие, если уменьшенное второе значение оказывается равным второму пороговому значению.
[035] В некоторых вариантах осуществления роботизированного транспортного средства процессор при инициировании экстренного действия дополнительно способен обеспечивать подачу в электродвигатель четвертого электрического тока, имеющего четвертое значение, знак которого совпадает со знаком уменьшенного второго значения, а абсолютная величина превышает абсолютную величину второго значения, для приложения к крышке четвертого усилия, действующего в направлении, совпадающем с направлением второго усилия.
[036] В некоторых вариантах осуществления роботизированного транспортного средства процессор при инициировании экстренного действия дополнительно способен обеспечивать установку крышки в открытое положение и ее удержание в этом положении с помощью электродвигателя.
[037] В некоторых вариантах осуществления роботизированного транспортного средства процессор при инициировании экстренного действия дополнительно способен обеспечивать фиксацию крышки с помощью электродвигателя.
[038] В некоторых вариантах осуществления роботизированного транспортного средства процессор при инициировании экстренного действия дополнительно способен обеспечивать изменение второго значения второго электрического тока электродвигателя между номинальным значением и уменьшенным вторым значением заданное количество раз.
[039] В некоторых вариантах осуществления роботизированного транспортного средства крышка в закрытом положении расположена под углом 0 градусов к горизонтальной плоскости.
[040] В некоторых вариантах осуществления роботизированного транспортного средства крышка во втором промежуточном положении расположена под углом 10 градусов к горизонтальной плоскости.
[041] В некоторых вариантах осуществления роботизированного транспортного средства крышка в первом промежуточном положении расположена под углом 50 градусов к горизонтальной плоскости.
[042] В некоторых вариантах осуществления роботизированного транспортного средства крышка в открытом положении расположена под углом 0 градусов к вертикальной плоскости.
Краткое описание чертежей
[043] Эти и другие признаки, аспекты и преимущества настоящей технологии содержатся в дальнейшем описании, в приложенной формуле изобретения и на следующих чертежах.
[044] На фиг. 1 схематически представлен пример компьютерной системы, пригодной для использования в некоторых вариантах реализации систем и/или способов в соответствии с настоящей технологией.
[045] На фиг. 2 показано электронное устройство роботизированного транспортного средства, связанное с сервером, в соответствии с некоторыми вариантами осуществления настоящей технологии.
[046] На фиг. 3 показано роботизированное транспортное средство в двух состояниях - с открытой крышкой и с закрытой крышкой.
[047] На фиг. 4 схематически представлены электронные элементы, которые могут использоваться для обеспечения работы роботизированного транспортного средства.
[048] На фиг. 5 схематически представлена система привода крышки роботизированного транспортного средства.
[049] На фиг. 6 показаны диапазоны положений крышки роботизированного транспортного средства относительно внутреннего пространства для размещения предметов.
[050] На фиг. 7 показана крышка в разных диапазонах положений, представленных на фиг. 6.
[051] На фиг. 8 показана зависимость электрического тока, подаваемого в электродвигатель крышки, от углового положения крышки в соответствии с некоторыми вариантами осуществления настоящей технологии.
[052] На фиг. 9 показана работа крышки в двух положениях при наличии препятствия, блокирующего ее движение.
[053] На фиг. 10 показаны пороги электрического тока, подаваемого в электродвигатель крышки, установленные в соответствии с некоторыми вариантами осуществления настоящей технологии.
[054] На фиг. 11 представлена блок-схема способа, реализованного в соответствии с различными вариантами осуществления раскрытой технологии.
Осуществление изобретения
[055] Ниже со ссылкой на приложенные чертежи приводится более подробное описание различных иллюстративных вариантов реализации раскрытой технологии. Вместе с тем, настоящая технология может быть реализована в разных формах и не должна считаться ограниченной рассмотренными в настоящем документе иллюстративными вариантами. Размеры и относительные размеры слоев и областей на чертежах могут быть увеличенными для наглядности. Нумерация элементов является сквозной.
[056] Представленные здесь примеры и условный язык предназначены для обеспечения лучшего понимания принципов настоящей технологии, а не для ограничения ее объема до таких специально приведенных примеров и условий. Следует понимать, что специалисты в данной области техники способны разработать различные способы и устройства, которые явно не описаны и не показаны, но реализуют принципы настоящей технологии в пределах ее существа и объема.
[057] Чтобы способствовать лучшему пониманию, последующее описание может содержать упрощенные варианты реализации настоящей технологии. Специалистам в данной области должно быть понятно, что различные варианты осуществления настоящей технологии могут быть значительно сложнее.
[058] В некоторых случаях приводятся предположительно полезные примеры модификаций настоящей технологии. Они призваны лишь способствовать пониманию и также не определяют объема или границ настоящей технологии. Представленный перечень модификаций не является исчерпывающим и специалист в данной области может разработать другие модификации в пределах объема настоящей технологии. Кроме того, если в некоторых случаях модификации не описаны, это не означает, что они невозможны и/или что описание содержит единственно возможный вариант реализации того или иного элемента настоящей технологии.
[059] Следует понимать, что для описания различных элементов в настоящем документе могут использоваться термины «первый», «второй», «третий» и т.д., но такое описание не должно считаться носящим ограничительный характер. Эти термины служат лишь для указания на различие элементов. Таким образом, без отступления от существа и объема настоящей технологии рассматриваемый первый элемент может быть назван вторым элементом. В контексте данного документа термин «и/или» означает все без исключения комбинации одного или нескольких относящихся к нему перечисленных элементов.
[060] Следует также понимать, что если элемент описан как «соединенный» или «связанный» с другим элементом, он может быть соединен или связан с другим элементом как непосредственно, так и через промежуточные элементы. Когда же элемент описывается как «непосредственно соединенный» или «непосредственно связанный» с другим элементом, это означает, что промежуточные элементы отсутствуют. Другие слова, используемые для описания взаимосвязи между элементами, следует интерпретировать подобным образом (например, «между» и «непосредственно между», «вблизи» и «в непосредственной близи» и т.д.).
[061] Терминология, используемая в настоящем документе, предназначена исключительно для описания отдельных иллюстративных вариантов реализации и не носит ограничительного характера для настоящей технологии. Здесь формы единственного числа включают в себя и формы множественного числа, если из контекста явно не следует иное. Кроме того, следует понимать, что термины «содержит/включает в себя» и/или «содержащий/включающий в себя» в контексте настоящего описания указывают на наличие указанных признаков, частей, шагов, операций, элементов и/или компонентов, но не исключают наличия или возможности добавления одного или нескольких других признаков, частей, шагов, операций, элементов, компонентов и/или их групп.
[062] Функции различных элементов, показанных на чертежах, включая все функциональные блоки, обозначенные как «процессор», могут быть реализованы с использованием специализированных аппаратных средств, а также аппаратных средств, способных обеспечивать работу соответствующего программного обеспечения. Если используется процессор, эти функции могут выполняться одним выделенным процессором, одним совместно используемым процессором или несколькими отдельными процессорами, некоторые из которых могут использоваться совместно. В некоторых вариантах осуществления настоящей технологии процессор может представлять собой процессор общего назначения, например, центральный процессор, или процессор, предназначенный для решения конкретной задачи, например, цифровой сигнальный процессор. Кроме того, явное использование термина «процессор» не должно трактоваться как указание исключительно на аппаратные средства, способные обеспечивать работу программного обеспечения, и может подразумевать, среди прочего, специализированную интегральную схему (ASIC), программируемую вентильную матрицу (FPGA), ПЗУ для хранения программного обеспечения, ОЗУ и энергонезависимое ЗУ. Также могут подразумеваться другие аппаратные средства, общего назначения и/или заказные.
[063] Программные модули либо просто модули или блоки, реализация которых предполагается на базе программных средств, могут быть представлены здесь в виде любого сочетания элементов блок-схемы или других элементов, указывающих на выполнение шагов процесса и/или содержащих текстовое описание. Такие модули могут реализовываться с помощью аппаратных средств, показанных явно или подразумеваемых. Кроме того, следует понимать, что модуль может включать в себя, например, среди прочего, компьютерную программную логику, компьютерные программные команды, программное обеспечение, стек, микропрограммное обеспечение, аппаратную схему или их сочетание, обеспечивая реализацию требуемых возможностей.
[064] В контексте данного описания термин «база данных» означает любой структурированный набор данных, независимо от его конкретной структуры, программного обеспечения для управления базой данных и компьютерных аппаратных средств для хранения таких данных, их применения или обеспечения их использования иным способом. База данных может размещаться в тех же аппаратных средствах, где реализован процесс, обеспечивающий хранение или использование информации, хранящейся в базе данных, либо в отдельных аппаратных средствах, таких как специализированный сервер или группа серверов.
[065] По меньшей мере некоторые аспекты настоящей технологии могут быть реализованы в виде системы, способа и/или компьютерного программного продукта. Компьютерный программный продукт может содержать машиночитаемый носитель (или носители) информации, хранящий машиночитаемые программные команды, при исполнении которых процессором реализуются аспекты раскрытой технологии. Машиночитаемым носителем информации может быть, например, электронное запоминающее устройство, магнитное запоминающее устройство, оптическое запоминающее устройство, электромагнитное запоминающее устройство, полупроводниковое запоминающее устройство или любое подходящее их сочетание. Открытый перечень более конкретных примеров машиночитаемого носителя информации включает в себя портативный компьютерный диск, жесткий диск, ОЗУ, ПЗУ, флэш-память, оптический диск, карту памяти, дискету, механически или визуально кодированный носитель (например, перфокарту или штрих-код) и/или любое их сочетание. Машиночитаемым носителем информации считается физический машиночитаемый носитель. Не следует в качестве него рассматривать временный сигнал, такой как радиоволны или другие свободно распространяющиеся электромагнитные волны, электромагнитные волны, распространяющиеся по волноводу или через другую среду передачи (например, световые импульсы, проходящие по волоконно-оптическому кабелю), или электрические сигналы, передаваемые по проводам.
[066] Следует понимать, что машиночитаемые программные команды могут быть загружены в соответствующие вычислительные устройства или устройства обработки непосредственно с машиночитаемого носителя информации либо на внешний компьютер или во внешнее запоминающее устройство через сеть, например, сеть Интернет, локальную сеть, глобальную сеть и/или беспроводную сеть. Сетевой интерфейс в вычислительном устройстве или в устройстве обработки может обеспечивать прием по сети машиночитаемых программных команд и их передачу для хранения на машиночитаемом носителе информации соответствующего вычислительного устройства или устройства обработки.
[067] Машиночитаемые программные команды, предназначенные для выполнения операций в контексте настоящего изобретения, могут представлять собой команды на языке ассемблера, машинные команды, микропрограммные команды, данные конфигурации для интегральных схем либо исходный или объектный код, написанный на одном или нескольких языках программирования в любом их сочетании. Машиночитаемые программные команды могут исполняться полностью на компьютере пользователя, частично на компьютере пользователя, в виде отдельного программного пакета, частично на компьютере пользователя и частично на удаленном компьютере либо полностью на удаленном компьютере или сервере. В последнем случае удаленный компьютер может быть подключен к компьютеру пользователя через сеть того или иного вида.
[068] Описание принципов, аспектов и вариантов реализации настоящей технологии, а также их конкретные примеры предназначены для охвата их структурных и функциональных эквивалентов, независимо от того, известны они в настоящее время или будут разработаны в будущем. Например, специалистам в данной области техники должно быть понятно, что все приведенные здесь блок-схемы соответствуют концептуальным представлениям иллюстративных принципиальных схем, реализующих принципы настоящей технологии. Также следует понимать, что все блок-схемы, схемы процессов, диаграммы изменения состояния, псевдокоды и т.п. соответствуют различным процессам, которые могут быть представлены на практике в виде машиночитаемых программных команд. Такие машиночитаемые программные команды могут передаваться в процессор или другое программируемое устройство обработки данных с целью создания механизма, обеспечивающего средства для реализации функций или операций, указанных на блок-схеме и/или в блоке или нескольких блоках схемы процессы, на основе команд, исполняемых процессором компьютера или другого программируемого устройства обработки данных. Машиночитаемые программные команды также могут быть сохранены на машиночитаемом носителе информации для управления компьютером, программируемым устройством обработки данных и/или другим устройством, с тем, чтобы сформировать на базе машиночитаемого носителя информации с хранящимися на нем командами изделие, содержащее команды, реализующие аспекты функции или операции, указанной на блок-схемах, схемах процессов, диаграммах изменения состояния, в псевдокоде и т.п.
[069] Машиночитаемые программные команды также могут быть загружены в компьютер, другое программируемое устройство обработки данных или иные устройства, чтобы обеспечить выполнение последовательности операционных шагов на компьютере, другом программируемом устройстве или иных устройствах и обеспечить компьютерный процесс, в котором команды, исполняемые на компьютере, другом программируемом устройстве или иных устройствах, реализуют функции или операции, указанные на блок-схемах, схемах процессов, диаграммах изменения состояния, в псевдокоде и т.п.
[070] В некоторых альтернативных вариантах осуществления функции, указанные на блок-схемах, схемах процессов, диаграммах изменения состояния, в псевдокоде и т.п., могут выполняться в порядке, отличном от указанного на чертежах. Например, два блока, расположенных на блок-схеме последовательно, в действительности могут выполняться по существу одновременно, а в некоторых случаях, в зависимости от предусмотренных функциональных возможностей, и в обратном порядке. Также следует отметить, что все функции, указанные на чертежах, и их комбинации могут быть реализованы с использованием специализированных аппаратных систем, выполняющих указанные функции или операции, или за счет сочетания специализированных аппаратных средств и компьютерных команд.
[071] С учетом вышеизложенных принципов ниже рассмотрены некоторые не имеющие ограничительного характера примеры, иллюстрирующие различные варианты реализации аспектов настоящего изобретения.
Компьютерная система
[072] На фиг. 1 представлена компьютерная система 100, реализованная в соответствии с одним не имеющим ограничительного характера вариантом осуществления настоящей технологии. Компьютерная система 100 может представлять собой портативный компьютер, планшетный компьютер, смартфон, встроенную систему управления или любую другую компьютерную систему, которая известна в настоящее время или будет разработана в будущем. Кроме того, следует понимать, что некоторые или все элементы компьютерной системы 100 могут быть виртуализированными и/или облачными. Как показано на фиг. 1, компьютерная система 100 содержит один или несколько процессоров 102, память 110, интерфейс 120 хранилища и сетевой интерфейс 140. Эти элементы системы соединены друг с другом с помощью шины 150, которая может включать в себя одну или несколько внутренних и/или внешних шин (не показаны), таких как шина PCI, шина USB, шина FireWire стандарта IEEE 1394, шина SCSI, шина Serial-ATA и т.д., с которыми различные аппаратные элементы соединены электронными средствами.
[073] Память 110, представляющая собой память с произвольным доступом или память любого другого типа, может содержать данные 112, операционную систему 114 и программу 116. Данными 112 могут быть любые данные, которые служат входными или выходными данными для любой программы в компьютерной системе 100. Операционной системой 114 может быть такая операционная система, как Microsoft Windows™ или Linux™. Программой 116 может быть любая программа или набор программ с запрограммированными командами, которые могут исполняться процессором для управления действиями компьютерной системы 100.
[074] Интерфейс 120 хранилища используется для подключения запоминающих устройств, таких как устройство 125 хранения данных, к компьютерной системе 100. Одним из типов устройства 125 хранения данных является твердотельный накопитель, в котором постоянное хранение данных может обеспечиваться интегральной схемой. Другим типом устройства 125 хранения данных является жесткий диск, например, электромеханическое устройство, в котором для хранения и извлечения цифровых данных используется магнитная память. Устройство 125 хранения данных также может представлять собой оптический накопитель, устройство чтения карт, в которое устанавливаются карты памяти, например SD-карты, или флэш-память, которая может быть подключена к компьютерной системе 100, например, через универсальную последовательную шину (USB).
[075] В некоторых вариантах осуществления в компьютерной системе 100 могут применяться известные технологии виртуальной памяти, позволяющие программам компьютерной системы 100 функционировать так, как если бы они имели доступ к большому непрерывному адресному пространству, а не к нескольким пространствам для хранения данных меньшего объема, таким как память 110 и устройство 125 хранения данных. Таким образом, несмотря на то, что данные 112, операционная система 114 и программы 116 показаны хранящимися в памяти 110, специалистам в данной области техники должно быть понятно, что эти элементы не обязательно одновременно полностью находятся в памяти 110.
[076] Процессоры 102 могут включать в себя один или несколько микропроцессоров и/или одну или несколько других интегральных схем. Процессоры 102 исполняют программные команды, хранящиеся в памяти 110. При запуске компьютерной системы 100 процессоры 102 могут сначала выполнять процедуру загрузки и/или исполнять программные команды операционной системы 114.
[077] Сетевой интерфейс 140 служит для подключения компьютерной системы 100 к другим компьютерным системам или сетевым устройствам (не показаны) через сеть 160. Сетевой интерфейс 140 может содержать комбинацию аппаратных и программных средств, которые обеспечивают взаимодействие с сетью 160. В некоторых вариантах реализации сетевой интерфейс 140 может представлять собой беспроводной сетевой интерфейс. Программное обеспечение сетевого интерфейса 140 может включать в себя программное обеспечение, в котором для обмена данными по сети 160 используются один или несколько сетевых протоколов. Сетевые протоколы могут включать в себя, например, протокол TCP/IP (протокол управления передачей/Интернет-протокол).
[078] Следует понимать, что компьютерная система 100 является лишь примером и что раскрытая технология может использоваться в компьютерных системах или других вычислительных устройствах иных конфигураций.
Роботизированное транспортное средство
[079] На фиг. 2 представлена сетевая среда 200, пригодная для использования с некоторыми не имеющими ограничительного характера вариантами реализации настоящей технологии. Среда 200 содержит вычислительное устройство 210, связанное с роботизированным транспортным средством 220. Среда 200 также содержит один или несколько серверов 235, соединенных с вычислительным устройством 210 через сеть 240 связи (например, через сеть Интернет и т.п.).
[080] Как видно на чертеже, роботизированное транспортное средство 220 может содержать корпус 222 и крышку 223. В зависимости от решаемых задач, возможны и другие конфигурации. Роботизированное транспортное средство 220 в показанном примере может использоваться для перевозки грузов (например, почты, продуктов, посылок, пакетов, цветов, медицинского оборудования и/или покупок). На фиг. 3 представлены изображение 301 роботизированного транспортного средства 220 с крышкой 223 в открытом положении и изображение 303 роботизированного транспортного средства 220 с крышкой 223 в закрытом положении. Когда крышка 223 находится в открытом положении, проем 309 в корпусе 222 обеспечивает доступ к внутреннему пространству 307 для размещения и/или извлечения предметов 305.
[081] В данном варианте осуществления крышка 223 изготовлена из полимерного материала, такого как акрилонитрил-бутадиен-стирол (АБС), с усилением по краю из алюминиевого сплава (АМг3). Масса крышки 223 составляет, например, от 2,2 до 2,7 кг, но не ограничивается этим. Расстояние от оси вращения крышки до ее центра масс в данном варианте осуществления составляет 0,4 м.
[082] Как показано на фиг. 2, в нижней части роботизированного транспортного средства 220 расположено шасси 225. Как видно из представленного варианта осуществления, предусмотрены три комплекта или пары колес, а именно колеса 226, колеса 227 и колеса 228. Роботизированное транспортное средство 220 также содержит световые или сигнальные элементы 284, 285 и 286, которые служат для предоставления визуальной информации человеку или людям, находящимся в окружающем пространстве роботизированного транспортного средства 220. Предполагается, что к шасси 225 могут крепиться различные системы и элементы роботизированного транспортного средства 220, такие как, среди прочего, система подвески, аккумуляторная батарея, панели наружной обшивки, электронные элементы и каркас корпуса. В некоторых вариантах реализации шасси 225 может быть изготовлено из алюминия. В других вариантах реализации корпус 222 и шасси 225 могут быть изготовлены из стеклопластика.
[083] В одном из вариантов реализации масса роботизированного транспортного средства 220 в порожнем состоянии может составлять 70 кг. В другом варианте реализации роботизированное транспортное средство может передвигаться со скоростью до 8 км/ч. В еще одном варианте реализации дорожный просвет роботизированного транспортного средства 220 с полной загрузкой может составлять 100 мм.
[084] Роботизированное транспортное средство 220 может представлять собой полностью автономное транспортное средство, способное передвигаться в процессе эксплуатации без участия человека, или частично автономное транспортное средство, в котором человек-оператор может выборочно дистанционно управлять некоторыми аспектами функционирования роботизированного транспортного средства, при этом другие аспекты автоматизированы, либо человек-оператор может брать на себя управление при определенных условиях (например, если роботизированное транспортное средство 220 застряло и не в состоянии определять в автономном режиме, как двигаться дальше). Одним из не имеющих ограничительного характера примеров является роботизированное транспортное средство 220, которое может функционировать автономно до тех пор, пока не возникнет неожиданная или необычная ситуация, с которой оно не способно справиться самостоятельно, и не потребуется дистанционное вмешательство человека-оператора. Следует отметить, что при этом не накладывается ограничений на конкретные параметры роботизированного транспортного средства 220, к числу которых, например, относятся производитель, модель, год выпуска, масса транспортного средства, размеры транспортного средства, распределение массы транспортного средства, площадь поверхности транспортного средства, высота транспортного средства, тип двигателя, вид шин (если таковые используются), система питания и прочие характеристики или параметры транспортного средства. Роботизированным транспортным средством 220, с которым связано вычислительное устройство 210, может быть любое роботизированное транспортное средство, предназначенное для доставки грузов, работы на складе и т.д.
[085] В по меньшей мере некоторых не имеющих ограничительного характера вариантах реализации настоящей технологии вычислительное устройство 210 связано с системами управления роботизированного транспортного средства 220. Вычислительное устройство 210 может управлять различными рабочими системами роботизированного транспортного средства 220, включая, среди прочего, систему управления двигателем, систему рулевого управления, а также системы освещения и сигнализации.
[086] В некоторых не имеющих ограничительного характера вариантах реализации настоящей технологии сетевая среда 200 может содержать спутник системы GPS (не показан), передающий сигнал GPS вычислительному устройству 210 и/или принимающий сигнал GPS от него. Следует понимать, что настоящая технология не ограничивается применением системы GPS и может быть реализована на базе любой другой технологии определения местоположения. Следует отметить, что спутник GPS может вовсе отсутствовать.
[087] В соответствии с не имеющими ограничительного характера вариантами осуществления настоящей технологии на реализацию вычислительного устройства 210 не накладывается каких-либо конкретных ограничений. Например, вычислительное устройство 210 может быть реализовано в виде блока управления двигателем транспортного средства, центрального процессора транспортного средства, компьютерной системы, встроенной в роботизированное транспортное средство 220, съемного блока управления и т.д. Следует отметить, что вычислительное устройство 210 может быть как связанным, так и не связанным с роботизированным транспортным средством 220 постоянным образом.
[088] Вычислительное устройство 210 может содержать некоторые или все элементы компьютерной системы 100, представленной на фиг. 1, в зависимости от конкретного варианта реализации настоящей технологии. В некоторых вариантах реализации вычислительное устройство 210 представляет собой бортовое компьютерное устройство и содержит процессоры 102, устройство 125 хранения данных и память 110. Иными словами, вычислительное устройство 210 содержит аппаратные средства и/или программное обеспечение и/или микропрограммное обеспечение либо их комбинацию для обработки данных и выполнения различных действий в зависимости от обрабатываемых данных. Например, вычислительное устройство 210 может получать данные от одного или нескольких датчиков и/или с сервера 235, обрабатывать полученные данные и инициировать перемещение роботизированного транспортного средства 220 на основе обрабатываемых данных.
[089] В некоторых не имеющих ограничительного характера вариантах реализации настоящей технологии сеть 240 связи представляет собой сеть Интернет. В других не имеющих ограничительного характера вариантах реализации настоящей технологии сеть 240 связи может быть реализована как любая подходящая локальная сеть (LAN, Local Area Network), глобальная сеть (WAN, Wide Area Network), частная сеть связи и т.п. Следует понимать, что варианты осуществления сети 240 связи приведены лишь в иллюстративных целях. Между вычислительным устройством 210 и сетью 240 связи предусмотрена линия связи (отдельно не обозначена), реализация которой зависит, среди прочего, от реализации вычислительного устройства 210. В качестве примера, линия связи, помимо прочего, может быть реализована в виде беспроводной линии связи. Примерами беспроводных линий связи могут служить, помимо прочего, канал сети связи 3G, канал сети связи 4G и т.п. В сети 240 связи также может использоваться беспроводное соединение с серверами 235.
[090] В некоторых вариантах реализации настоящей технологии серверы 235 реализованы в виде компьютерных серверов и могут содержать некоторые или все элементы компьютерной системы 100, представленной на фиг. 1. В одном не имеющем ограничительного характера примере серверы 235 реализованы в виде серверов Dell™ PowerEdge™, работающих под управлением операционной системы Microsoft™ Windows Server™, однако они также могут быть реализованы на базе любых других подходящих видов аппаратных средств, программного обеспечения и/или микропрограммного обеспечения либо их сочетания.
[091] В некоторых не имеющих ограничительного характера вариантах реализации настоящей технологии процессоры 102 вычислительного устройства 210 могут быть связаны с серверами 235 для получения одного или нескольких обновлений. Такие обновления могут включать в себя, среди прочего, обновления программного обеспечения, обновления карт, обновления маршрутов, обновления настроек географических озон, обновления метеоданных и т.п. В некоторых не имеющих ограничительного характера вариантах реализации настоящей технологии вычислительное устройство 210 также способно отправлять на серверы 235 определенные рабочие данные, например, информацию о пройденных маршрутах, данные о дорожной обстановке, эксплуатационные данные и т.п. Некоторые или все такие данные, передаваемые между роботизированным транспортным средством 220 и серверами 235, могут быть зашифрованы и/или обезличены.
[092] Следует отметить, что вычислительное устройство 210 может использовать ряд датчиков и систем для сбора информации об окружающем пространстве 250 роботизированного транспортного средства 220. Роботизированное транспортное средство 220 оборудовано множеством датчиков (не обозначены). Следует отметить, что для сбора различных видов данных об окружающем пространстве 250 роботизированного транспортного средства 220 могут применяться различные системы датчиков. Предполагается, что без отступления от существа и объема настоящей технологии на роботизированном транспортном средстве 220 может совместно использоваться множество различных систем датчиков.
[093] В не имеющем ограничительного характера примере, показанном на фиг. 2, роботизированное транспортное средство 220 содержит лидарную систему 280, установленную на роботизированном транспортном средстве 220 и связанную с вычислительным устройством 210. В общем случае лидарная система способна собирать данные об окружающем пространстве 250 роботизированного транспортного средства 220, например, для построения многомерной карты объектов из окружающего пространства 250 роботизированного транспортного средства 220. В частности, лидарная система 280 может определять местоположение объектов и расстояние до них, используя явление отражения световой энергии, передаваемой посредством импульсного лазерного излучения. При попадании на объект излученный лазерный импульс отражается обратно к датчику лидарной системы 280. Путем измерения времени прохождения импульса может быть рассчитано расстояние до объекта. Типичные лидарные системы способны формировать короткие импульсы лазерного излучения с частотой до нескольких сотен тысяч импульсов в секунду. В большинстве случаев энергия лучей автомобильных лидаров ограничивается безопасным для глаз уровнем излучения лазерных изделий класса 1.
[094] В по меньшей мере некоторых вариантах осуществления лидарная система 280 содержит лазерные диоды для формирования лазерных лучей, фотодиоды для приема обратных (то есть отраженных) сигналов и зеркальное устройство с сервоприводом для задания направления лазерного луча по горизонтали и вертикали. Сформированные лазерные импульсы направляются на зеркальное устройство с сервоприводом. Зеркальное устройство может быть настроено для передачи импульсов под различными вертикальными и/или горизонтальными углами. Оптический энкодер обеспечивает обратную связь для управления серводвигателем, что обеспечивает точное управление зеркалом и формируемым лазерным излучением. Обратные сигналы улавливаются фотодиодами и обрабатываются блоком обработки сигналов лидарной системы 280. Лидарная система 280 способна формировать набор данных облака точек, представляющих обнаруженные объекты, с сопутствующей информацией об измеренных расстояниях и местоположениях в трехмерной системе координат относительно лидарной системы 280.
[095] В одном из вариантов осуществления лидарная система 280 может быть реализована как вращающаяся лидарная система, излучающая шестьдесят четыре (64) световых луча, но без отступления от существа и объема настоящей технологии могут быть реализованы и другие конфигурации. Например, одна или несколько лидарных систем могут быть установлены на роботизированном транспортном средстве 220 в разных местах и/или в разных конфигурациях для сбора информации об окружающем пространстве 250 роботизированного транспортного средства 220.
[096] Как упоминалось выше, вычислительное устройство 210 может обнаруживать один или несколько объектов в окружающем пространстве 250 роботизированного транспортного средства 220 на основе данных, полученных от одной или нескольких систем камер и одной или нескольких лидарных систем. Например, вычислительное устройство 210, способное обнаруживать заданные объекты в окружающем пространстве 250 роботизированного транспортного средства 220, может идентифицировать данные лидаров и камер, связанные с заданным объектом, создавать «внедрения», представляющие признаки, связанные с этим объектом, и выделять этот объект путем формирования ограничивающей рамки для него.
[097] В не имеющем ограничительного характера примере, показанном на фиг. 2, роботизированное транспортное средство 220 содержит радиолокационные системы 281, которые установлены на роботизированном транспортном средстве 220 и связаны с вычислительным устройством 210. В общем случае одна или несколько радиолокационных систем способны собирать данные о разных частях окружающего пространства 250 роботизированного транспортного средства 220, используя радиоволны. Например, одна или несколько радиолокационных систем способны собирать радиолокационные данные о потенциальных объектах в окружающем пространстве 250 роботизированного транспортного средства 220 и эти данные могут характеризовать расстояние от радиолокационных систем до объектов, ориентацию объектов, скалярную и/или векторную скорость объектов и т.п.
[098] В частности, для обнаружения объектов и слежения за ними в радиолокационных системах 281 могут использоваться радиоволны, то есть электромагнитные волны с большей длиной волны, чем у инфракрасного излучения. Радиолокационные системы 281 могут излучать импульсы радиоволн, которые отражаются от объектов, окружающих роботизированное транспортное средство 220, вызывая обратные волны, несущие информацию о направлении, расстоянии и размере каждого объекта в окружающем пространстве роботизированного транспортного средства 220. Радиолокационная система 281 также может использоваться для определения направления и скорости движения объекта за счет передачи последовательности импульсов. В частности, радиолокационная система 281 может содержать два эхо-радара, размещенных в разных местах роботизированного транспортного средства 220, для сбора дополнительной информации о положении объекта, например, об угле объекта. Радиолокационная система 281 может анализировать фазы волн (например, как в случае с доплеровским радиолокатором), отслеживая каждую отдельную волну и обнаруживая отличия в положении, форме и виде волны при ее возврате от объекта к радиолокационной системе 281. В дальнейшем полученная информация может быть использована, чтобы определить, какому сдвигу подверглась волна - положительному или отрицательному. Отрицательный сдвиг означает, что объект, вероятнее всего, удаляется от радиолокационной системы 281, а положительный - что объект приближается к радиолокационной системе 281. Исходя из величины такого сдвига может быть определена скорость объекта.
[099] В не имеющем ограничительного характера примере, показанном на фиг. 2, роботизированное транспортное средство 220 содержит датчики 282 типа «камера», которые установлены на роботизированном транспортном средстве 220 и связаны с вычислительным устройством 210. В общем случае один или несколько датчиков типа «камера» способны собирать данные изображения о разных частях окружающего пространства 250 роботизированного транспортного средства 220. В некоторых случаях данные изображения, предоставленные одним или несколькими датчиками типа «камера», могут использоваться вычислительным устройством 210 для выполнения процедур обнаружения объектов. Например, вычислительное устройство 210 может передавать данные изображения, предоставленные одним или несколькими датчиками типа «камера», в нейронную сеть обнаружения объектов (ODNN, Object Detection Neural Network), обученную выявлению и классификации потенциальных объектов в окружающем пространстве 250 роботизированного транспортного средства 220.
[0100] В некоторых вариантах осуществления один или несколько датчиков типа «камера» могут быть оснащены объективами типа «рыбий глаз» с углом обзора более 180 градусов. Предполагается, что один или несколько датчиков типа «камера» на роботизированном транспортном средстве 220 могут иметь такую ориентацию, чтобы по меньшей мере часть роботизированного транспортного средства 220 находилась в поле обзора одного или нескольких датчиков типа «камера». В дополнительных вариантах осуществления один или несколько датчиков типа «камера» могут быть оснащены длиннофокусными объективами. Например, датчик типа «камера», ориентированный по ходу движения, может быть оснащен таким объективом, чтобы лучше различать светофор на противоположной стороне пересекаемой улицы.
[0101] В не имеющем ограничительного характера примере, показанном на фиг. 2, роботизированное транспортное средство 220 содержит ультразвуковые датчики 283, которые установлены на роботизированном транспортном средстве 220 и связаны с вычислительным устройством 210. В общем случае ультразвуковой датчик представляет собой измерительное устройство, измеряющее расстояние до объекта, используя ультразвуковые волны. Такие датчики могут содержать приемопередатчик для передачи и приема ультразвуковых импульсов, обеспечивающих получение информации о близости объекта. Звуковые волны, создаваемые одним или несколькими ультразвуковыми датчиками, могут отражаться от поверхностей раздела и формировать четкие эхосигналы. В некоторых вариантах осуществления один или несколько ультразвуковых датчиков роботизированного транспортного средства 220 могут выдавать показания о расстоянии до заданного объекта и формировать эхограмму. Предполагается, что такую информацию можно эффективно использовать для настройки порогов срабатывания в зависимости, среди прочего, от погодных условий и дорожного покрытия.
[0102] В частности, ультразвуковые датчики 283 могут использовать высокочастотные акустические волны для обнаружения объектов и определения расстояния до них. В процессе работы ультразвуковые датчики 283 передают пакеты волн и определяют время распространения волн, которые отражаются от объекта и возвращаются к ультразвуковым датчикам 283. В большинстве случаев в ультразвуковых датчиках используются акустические волны, неслышимые для человека, поскольку передаваемые волны имеют высокую амплитуду (>100 дБ), чтобы датчики могли принимать различимые отраженные волны. В некоторых вариантах осуществления ультразвуковые датчики 283 содержат излучатель, преобразующий электрическое переменное напряжение в ультразвук, и приемник, формирующий переменное напряжение при приложении к нему силы.
[0103] В по меньшей мере некоторых вариантах осуществления роботизированное транспортное средство 220 дополнительно содержит инерциальный измерительный блок, который содержит датчики движения, такие как акселерометры (например, емкостные, пьезоэлектрические или любые другие подходящие акселерометры), гироскопы (например, механические, оптические, микроэлектромеханические или любые другие подходящие гироскопы) и магнитометры, для определения положения и параметров движения роботизированного транспортного средства 220. Например, инерциальный измерительный блок может содержать три гироскопа и три акселерометра, которые обеспечивают оценку положения по шести степеням свободы. Дополнительно инерциальный измерительный блок может содержать три магнитометра для обеспечения оценки по девяти степеням свободы.
[0104] На фиг. 4 представлена схема 400 электронных элементов, которые могут использоваться для обеспечения функционирования роботизированного транспортного средства 220. Предполагается, что вычислительное устройство 210 может содержать один или несколько электронных элементов, в том числе главный контроллер 420, контроллер 410 платформы, периферийный контроллер 430 и группу контроллеров 460, 470, 480 колес. В некоторых альтернативных не имеющих ограничительного характера вариантах осуществления функции вычислительного устройства 210, главного контроллера 420, контроллера 410 платформы, периферийного контроллера 430 и/или группы контроллеров 460, 470, 480 колес могут быть объединены в одном или нескольких вычислительных устройствах.
[0105] Контроллеры колес могут быть реализованы в виде процессоров. Предполагается, что один или несколько электронных элементов роботизированного транспортного средства 220 могут быть размещены в общем и/или в отдельных изолированных корпусах. В некоторых вариантах реализации связь между различными электронными элементами может осуществляться через шины CAN (Controller Area Network). В данном варианте осуществления для связи между различными электронными элементами, в частности, между главным контроллером 420 и вычислительным устройством 210, в дополнение к шинам CAN в некоторых случаях используется протокол передачи данных Ethernet. Также предполагается, что одни электронные элементы получают питание с напряжением аккумуляторной батареи (VBAT), а другие - с напряжением 12 В. Кроме того, в обмене данными между различными электронными элементами участвуют преобразователи сигналов, которые обеспечивают преобразование информации, получаемой теми или иными электронными элементами, в подходящую форму (например, цифровую, дискретную и/или аналоговую).
[0106] В общем случае главный контроллер 420 является в некотором смысле «мозгом» роботизированного транспортного средства 220. Главный контроллер 420 представляет собой компьютерную систему, способную выполнять один или несколько компьютерных алгоритмов для распознавания объектов (например, людей, автомобилей, препятствий), планирования траектории движения роботизированного транспортного средства, определение местоположения роботизированного транспортного средства 220 в окружающем пространстве и т.д. Главный контроллер 420 может содержать маршрутизатор, через который другие элементы могут подключаться к единой бортовой сети. В одном из вариантов реализации в главный контроллер 420 могут поступать видеоданные от датчиков 282 типа «камера», данные лидара от лидарной системы 280 и радиолокационные данные от радиолокационных систем 281.
[0107] В целом, контроллер 410 платформы способен обеспечивать питание одного или нескольких электронных элементов роботизированного транспортного средства 220. Например, контроллер 410 платформы может управлять ограничением тока в соответствующих линиях питания и осуществлять переключение на питание от вспомогательного источника 414 электропитания в случае снятия и/или в процессе замены основного источника 412 электропитания. Источниками 414, 412 электропитания могут быть, например, аккумуляторные батареи. Также предполагается, что контроллер 410 платформы способен выдавать команды управления колесами и собирать данные от ультразвуковых датчиков 283. В другом варианте, без отступления от существа и объема настоящей технологии, данные ультразвуковых датчиков могут собираться одним или несколькими другими контроллерами внутри роботизированного транспортного средства 220.
[0108] В общем случае периферийный контроллер 430 способен управлять одной или несколькими периферийными системами роботизированного транспортного средства 220. Например, периферийный контроллер 430 может быть способен управлять системой 440 привода крышки и системой 450 освещения роботизированного транспортного средства 220. В частности, система 440 привода крышки содержит крышку 223 и электродвигатель, функционально связанный с крышкой 223. Система 440 привода крышки также может содержать датчики для определения параметров, характеризующих движение крышки 223, например, углового положения крышки 223, частоты вращения электродвигателя крышки 223 и/или каких-либо других параметров, относящихся к приводу крышки 223. Таким образом, периферийный контроллер 430 может, например, управлять электродвигателем крышки 223, запирая и отпирая крышку 223. Система 450 освещения содержит световые или сигнальные элементы 284, 285 и 286, которые служат для предоставления визуальной информации человеку или людям, находящимся в окружающем пространстве роботизированного транспортного средства 220. Для этого периферийный контроллер 430 может, например, управлять визуальными сигналами, выдаваемыми одним или несколькими средствами визуальной сигнализации (например, световыми или сигнальными элементами 284, 285 и 286) роботизированного транспортного средства 220.
[0109] В общем случае контроллеры 460, 470 и 480 колес способны управлять соответствующими колесами роботизированного транспортного средства 220. В некоторых вариантах осуществления роботизированное транспортное средство 220 может содержать мотор-колеса (с внутриколесными электродвигателями для приведения колес в движение). В частности, каждое мотор-колесо обеспечивает управление соответствующим колесом за счет электродвигателя, который встроен в ступицу этого колеса и непосредственно приводит его в движение. Мотор-колеса могут использоваться в роботизированном транспортном средстве вместо электродвигателя, размещенного внутри корпуса 222. В данном варианте осуществления каждое колесо содержит электронный блок, включающий в себя процессор, который может быть связан с вычислительным устройством 210, микроконтроллер (например, соответствующего мотор-колеса), подключенный к этому процессору, или любое другое вычислительное устройство. Использование мотор-колес позволяет освободить пространство в корпусе 222 и снизить риск перегрева других элементов внутри корпуса 222 под действием тепловой энергии, выделяемой электродвигателем. В частности, контроллер колес может получать значения частоты вращения для соответствующих колес от контроллера 410 платформы и регулировать токи в обмотках мотор-колес, например, для обеспечения требуемой скорости в различных условиях движения.
Работа роботизированного транспортного средства
[0110] По меньшей мере некоторые аспекты настоящей технологии позволяют обеспечивать навигацию и/или планирование движения для управления роботизированным транспортным средством 220 в окружающем пространстве 250, где присутствуют как статические, так и динамические (то есть движущиеся) объекты. Роботизированное транспортное средство 220 может передвигаться и ориентироваться в городских и/или пригородных условиях для доставки товаров, пакетов, коробок и/или прочих посылок. Роботизированное транспортное средство 220 может ориентироваться в окружающей среде (например, на улицах, на пешеходных переходах, в поле). В силу выполняемых задач роботизированное транспортное средство 220 может передвигаться по тротуарам и пешеходным дорожкам. Соответственно, модуль планирования движения в роботизированном транспортном средстве учитывает поведение пешеходов, движущихся вдоль его траектории или пересекающих ее. Кроме того, роботизированное транспортное средство 220 может пересекать дороги. Автомобили и прочие транспортные средства, движущиеся по дорогам в городских и/или пригородных условиях, могут не «замечать» малогабаритные роботизированные транспортные средства, в связи с чем, например, вероятны столкновения, в которых есть риск повреждения или уничтожения роботизированного транспортного средства 220 и его груза. Следовательно, модуль планирования движения роботизированного транспортного средства 220 может принимать во внимание объекты на проезжей части, в том числе движущиеся и припаркованные автомобили и другие транспортные средства.
[0111] Роботизированное транспортное средство 220 также может ориентироваться в помещениях, таких как офисы, склады, конференц-центры и любые другие помещения, в которых требуется передвигаться роботизированному транспортному средству 220. Таким образом, модуль планирования движения в роботизированном транспортном средстве учитывает поведение людей и других подвижных объектов (например, животных), движущихся вдоль его траектории или пересекающих ее.
[0112] Одной из основных задач транспортного средства, предназначенного для доставки, может быть доставка посылки из начального пункта в пункт назначения к определенному времени. Соответственно, модуль планирования движения может учитывать скорость движения роботизированного транспортного средства 220 и оценивать эффективность продвижения к пункту назначения. Указанные факторы имеют особое значение, когда задачи доставки носят срочный характер или когда пункт назначения расположен на значительном расстоянии.
[0113] Если, например, роботизированное транспортное средство 220 использует лидарную систему 280, то вычислительное устройство 210, связанное с роботизированным транспортным средством 220, получает данные от датчиков и имеет возможность формировать трехмерную карту точек (облако точек). Эта трехмерная карта точек может использоваться роботизированным транспортным средством, в частности, для нахождения расстояния до внешних объектов, а также для определения траектории и скорости движения.
[0114] Предполагается, что роботизированное транспортное средство 220 также может использовать трехмерную карту, предоставляемую ему серверами 235. Например, без отступления от существа и объема настоящей технологии трехмерная карта окружающей среды, в которой должно работать роботизированное транспортное средство 220, может «строиться» на серверах 235, а роботизированному транспортному средству 220 может предоставляться удаленный доступ к ней. Дополнительно или в качестве альтернативы, трехмерная карта окружающей среды может, по меньшей мере частично, передаваться роботизированному транспортному средству 220 для локального хранения и локального доступа.
[0115] Следует отметить, что серверы 235 могут собирать информацию от одного или нескольких роботизированных транспортных средств (например, парка транспортных средств), которым поставлена задача картографирования окружающей среды, создавая в результате трехмерные карты заданного региона. Например, одно или несколько роботизированных транспортных средств могут обеспечивать составление трехмерной карты улицы, квартала, района, города и т.п. Такая информация может собираться серверами 235 для получения трехмерной карты, предназначенной для использования при работе роботизированного транспортного средства 220, путем объединения данных от одного или нескольких роботизированных транспортных средств. Предполагается, что трехмерная карта, используемая роботизированным транспортным средством 220 для навигации и планирования движения, может иметь систему координат для определения местоположения различных объектов, присутствующих в окружающей среде, таких как столбы, почтовые ящики, бордюры, дороги, здания, пожарные гидранты, дорожные конусы, светофоры, пешеходные переходы, деревья, заборы, рекламные щиты, километровые указатели и т.п. В другом примере одно или несколько роботизированных транспортных средств могут обеспечивать составление трехмерной карты офиса, одного или нескольких этажей здания, торгового комплекса, конференц-центра, склада, центра обработки данных или любого другого комплекса помещений, пригодного для навигации одного или нескольких роботизированных транспортных средств. Предполагается, что трехмерная карта, используемая роботизированным транспортным средством 220 для навигации и планирования движения, может иметь систему координат для определения местоположения различных объектов, присутствующих в окружающей среде, таких как мебель, двери, стеллажи, лестницы, лестничные марши, магазины, лифты и т.п.
Работа крышки
[0116] Система 440 привода крышки в не имеющем ограничительного характера варианте осуществления, показанном на фиг. 5, содержит процессор 442, электродвигатель 444, энкодер 446 и крышку 223. Процессор 442 может быть реализован, например, аналогично процессорам 102. Система 440 привода крышки также может содержать поворотный вал 605 крышки (см. фиг. 6), позволяющий электродвигателю 444 приводить во вращение крышку 223. Узел, состоящий из процессора 442, энкодера 446 и электродвигателя 444, соединенного с поворотным валом 605 крышки, может быть назван «механизмом управления крышкой».
[0117] Электродвигателем 444 может быть любой электродвигатель, пригодный для обеспечения поворота крышки 223. Электродвигатель 444 может представлять собой, например, среди прочего, электродвигатель с железным сердечником, бесщеточный электродвигатель или электродвигатель без сердечника. Электрический ток для питания электродвигателя 444 может подаваться от основного источника 412 электропитания или вспомогательного источника 414 электропитания. Управление подачей электрического тока в электродвигатель 444 может обеспечиваться процессором 442. Например, для питания электродвигателя 444 может использоваться постоянный электрический ток, сила которого регулируется процессором 442. В одном из вариантов реализации электродвигатель 444 представляет собой редукторный электродвигатель TWIRL серии PG45775, состоящий из планетарного редуктора 45 мм серии PG45 и щеточного электродвигателя 42 мм серии RS775.
[0118] Энкодером 446 может быть любое аппаратное устройство или программное обеспечение, пригодное для кодирования данных в зависимости от величины перемещения крышки 223. Величина перемещения может характеризоваться, например, угловым положением крышки 223 относительно исходного положения, скорости вращения крышки вокруг поворотного вала 605 крышки, ускорением вращения крышки вокруг поворотного вала 605 крышки или любыми другими параметрами. В по меньшей мере некоторых вариантах осуществления энкодером 446 является магнитный энкодер TWIRL ME775. Предполагается, что без отступления от существа и объема настоящей технологии энкодер может быть встроен в электродвигатель привода крышки 223.
[0119] Как наиболее наглядно показано на фиг. 6, ось 610 вращения крышки 223 представляет собой ось поворотного вала 605 крышки. В данном варианте осуществления ось 610 вращения ортогональна оси силы тяжести. Можно утверждать, что крышка 223 поворачивается вокруг горизонтальной оси, а не, например, вокруг вертикальной оси. Как более подробно описано ниже, в связи с тем, что крышка 223 поворачивается вокруг горизонтальной оси, на вращение крышки 223 может оказывать влияние сила тяжести. Угловое положение крышки 223 относительно оси 610 определяется углом θ, который может изменяться в угловом диапазоне от θ = 0 до θ = θ0. В частности, значение θ = 0 соответствует закрытому положению крышки 223, в котором проем 309 закрыт крышкой 223. Иными словами, при θ = 0 внутреннее пространство 307 для размещения предметов изолировано.
[0120] В данном варианте осуществления поворот крышки 223 вокруг оси 610 разделен на три фазы. Иными словами, угловой диапазон θ включает в себя три угловых поддиапазона: 0 < θ < θB, θB < θ < θA и θA < θ < θ0. Для лучшего понимания, первая фаза перемещения крышки 223 соответствует перемещению крышки 223 от θ0 до θA, вторая фаза - от θA до θB, а третья фаза - от θB до 0. В частности, в данном варианте осуществления угол θB равен 10°, угол θA равен 50°, а угол θ0 равен 90°. В альтернативных вариантах осуществления количество угловых поддиапазонов (то есть фаз поворота крышки 223) и/или значения θB, θA и θ0 могут быть другими.
[0121] Следует понимать, что в связи с тем, что ось 610 вращения ортогональна направлению силы тяжести, приводное усилие, создаваемое электродвигателем 444 для поворота крышки 223 вокруг оси 610 вращения, уравновешивает, по меньшей мере частично, вес крышки 223 во время ее открывания.
[0122] Разработчики настоящей технологии учли, что движению крышки 223 могут препятствовать внешние силы. Например, сила тяжести может создавать на крышке 223 первый внешний крутящий момент. Крутящий момент, создаваемый силой 720 тяжести, зависит по меньшей мере от ориентации (углового положения) крышки 223 относительно оси 610 вращения. В частности, крутящий момент, возникающий под действием силы 720 тяжести, увеличивается при уменьшении угла θ.
[0123] На крышке 223 также может создаваться второй внешний крутящий момент под действием ветровой нагрузки. Крутящий момент, создаваемый ветровой нагрузкой 710, зависит по меньшей мере от площади эффективной поверхности крышки 223 или «площади ветровой нагрузки», которая соответствует площади поверхности крышки, подверженной ветровой нагрузке. В вариантах расположения на изображениях 701, 702 и 703 эффективная поверхность представляет собой проекцию крышки 223 на вертикальную плоскость, параллельную оси 610 вращения. Таким образом, крутящий момент, создаваемый ветровой нагрузкой 710, изменяется в зависимости от угла θ. В частности, крутящий момент, создаваемый ветровой нагрузкой 710, уменьшается при уменьшении угла θ. На изображениях 701, 702 и 703, представленных на фиг. 7, показаны приводные усилия, прикладываемые электродвигателем 444 к крышке 223, для трех различных фаз поворота крышки 223.
Первая фаза поворота имеет место в интервале от θ = θ0 до θ = θA.
[0124] На изображении 701 крышка поворачивается из положения θ = θ0 в положение θ = θA. Разработчики настоящей технологии учли, что в этой фазе первый внешний крутящий момент действует в текущем направлении поворота крышки 223 (то есть по часовой стрелке на изображении 701). При этом второй внешний крутящий момент действует в направлении, противоположном текущему направлению поворота крышки 223 (то есть против часовой стрелки на изображении 701). Иными словами, ветровая нагрузка 710 препятствует повороту крышки 223 из положения θ = θ0 в положение θ = θA. В силу различия величин внешних крутящих моментов, повороту крышки 223 из положения θ = θ0 в положение θ = θA препятствует суммарный внешний крутящий момент.
[0125] Таким образом, чтобы обеспечить фактический поворот крышки 223 в первой фазе поворота, электродвигатель 444 получает первый ток, имеющий первое значение, от источника электропитания (например, от основного источника 412 электропитания), что позволяет создать первое приводное усилие 732 для поворота крышки в направлении θ = θA. Соответственно, первое приводное усилие 732 на изображении 701 направлено по часовой стрелке для преодоления действия ветровой нагрузки 710 в первой фазе поворота крышки 223.
Вторая фаза поворота имеет место в интервале от θ = θA до θ = θB.
[0126] На изображении 702 крышка 223 вступает во вторую фазу своего поворота вокруг оси 610 вращения. На этой фазе крышка поворачивается из положения θ = θA в положение θ = θB. Разработчики настоящей технологии учли, что в этой фазе первый внешний крутящий момент увеличивается в сравнении с первой фазой, а второй внешний крутящий момент уменьшается в сравнении с первой фазой. При этом крышка 223 поворачивается из положения θ = θA в положение θ = θB под действием суммарного внешнего крутящего момента.
[0127] Таким образом, чтобы обеспечить фактический поворот крышки 223 во второй фазе поворота, электродвигатель 444 получает второй ток, имеющий второе значение, от источника электропитания (например, от основного источника 412 электропитания), что позволяет создать второе приводное усилие 734 в направлении, противоположном направлению первого приводного усилия 732, и по меньшей мере частично уравновесить силу тяжести. Соответственно, второе приводное усилие 734 на изображении 702 направлено против часовой стрелки. Можно утверждать, что во второй фазе поворот крышки 223 осуществляется в управляемом режиме под действием силы 720 тяжести.
Третья фаза поворота имеет место в интервале от θ = θB до θ = 0.
[0128] На изображении 703 крышка 223 вступает в третью фазу своего поворота вокруг оси 610 вращения. В этой фазе крышка поворачивается из положения θ = θB в положение θ = 0. Разработчики настоящей технологии учли, что в этой фазе первый внешний крутящий момент увеличивается в сравнении со второй фазой, а второй внешний крутящий момент уменьшается в сравнении со второй фазой. При этом крышка 223 поворачивается из положения θ = θB в положение θ = 0 под действием суммарного внешнего крутящего момента.
[0129] Чтобы обеспечить фактическое закрывание крышки 223, электродвигатель 444 получает третий ток, имеющий третье значение, от источника электропитания (например, от основного источника 412 электропитания), что позволяет прикладывать к крышке 223 третье приводное усилие 736 в направлении, совпадающем с направлением первого приводного усилия 732 (то есть по часовой стрелке на изображении 703), для закрывания крышки 223. После закрывания крышки 223 (то есть при θ = 0) система запирания может удерживать крышку 223 в закрытом положении. Система запирания может представлять собой, например, среди прочего, механическую систему запирания или магнитную систему запирания. В альтернативном варианте осуществления для удержания крышки 223 в закрытом положении электродвигатель 444 может создавать постоянное приводное усилие.
[0130] Таким образом, можно утверждать, что направление приводного усилия, создаваемого электродвигателем 444 на оси вращения крышки 223 при повороте крышке 223 из положения θ = θ0 в положение θ = 0, изменяется. На фиг. 8 изменение направления приводного усилия представлено в виде изменения электрического тока I, подаваемого в электродвигатель 444 для управления крышкой 223, в зависимости от угла θ. Для облегчения понимания фиг. 8 следует отметить, что описание фиг. 7 и 8 относится к процессу закрывания крышки 223. Соответственно, фиг. 8 следует изучать, начиная с больших значений угла θ и заканчивая малыми значениями угла θ. Более подробное описание процесса открывания крышки 223 (то есть изменения угла θ от 0 до θ0) приведено ниже.
[0131] В первой фазе перемещения электрический ток I имеет первое значение I1, которое в данном варианте осуществления является положительным, вследствие чего первое приводное усилие 732 в примере, представленном на изображении 701, направлено по часовой стрелке. Значение I1 может составлять, например, среди прочего, 1,1 А. После того как угол θ достигает значения θA, знак электрического тока изменяется, в результате чего во второй фазе электрический ток I принимает второе значение I2. Обнаружив, что угол θ достиг значения θA, энкодер 446 может отправить уведомление процессору 442, чтобы процессор 442 мог обеспечить изменение знака электрического тока I. Изменение знака электрического тока I между первой и второй фазами приводит к изменению направления приводного усилия относительно оси 610 вращения. В общем случае положительное значение электрического тока I вызывает приложение к крышке 223 приводного усилия, действующего в первом направлении, а противоположное значение электрического тока I вызывает приложение к крышке 223 приводного усилия, действующего во втором направлении, противоположном первому направлению.
[0132] В данном варианте осуществления значение I2 является отрицательным, поэтому второе приводное усилие 734 в примере, представленном на изображении 702, направлено против часовой стрелки. Значение I2 может составлять, например, среди прочего, -0,8 А. После того, как угол θ достигает значения θB, знак электрического тока еще раз изменяется, в результате чего в третьей фазе электрический ток I принимает третье значение I3. Как и в предыдущем примере, изменение знака электрического тока I между второй и третьей фазами приводит к тому, что направление третьего приводного усилия 736 оказывается противоположным направлению второго приводного усилия 734 относительно оси 610 вращения. В данном варианте осуществления значение I3 является положительным, поэтому третье приводное усилие 736 в примере, представленном на изображении 703, направлено по часовой стрелке. В по меньшей мере некоторых вариантах осуществления ток I1 меньше тока I3, в связи с чем первое приводное усилие 732 меньше третьего приводного усилия 736. Значение тока I3 может составлять, например, среди прочего, 2,2 А.
[0133] На изображении 901, представленном на фиг. 9, показана крышка 223, находящаяся в первой фазе поворота вокруг оси 610 вращения (то есть при θA < θ < θ0), в состоянии, когда ее движение затрудняется препятствием 950 (например, какой-либо предмет или часть тела человека). В данном варианте осуществления процессор 442, на основе информации об одной или нескольких величинах перемещения, предоставляемой энкодером 446, может обнаружить, что перемещение крышки 223 тормозится или даже блокируется.
[0134] В частности, процессор 442 может контролировать величину перемещения крышки 223, например, среди прочего, исходя из положения крышки 223, частоты вращения вала крышки 223, ускорения крышки 223 и/или каких-либо других параметров, относящихся к приводу крышки 223. При величине перемещения, меньшей заданного порогового значения, процессор 442 может изменять электрический ток I с целью увеличения приводного усилия, действующего на крышку 223 в текущем направлении вращения.
[0135] Таким образом, в первой фазе процессор 442 может повышать первое значение I1 электрического тока до увеличенного первого значения. Если после того, как увеличенное первое значение достигает первого порога ITH1, величина перемещения все еще оказывается меньше заданного порогового значения, процессор 442 инициирует экстренное действие. Более подробное описание первого порога ITH1 приведено ниже. Следует отметить, что в данном варианте осуществления увеличение приводного усилия, действующего на крышку 223 в текущем направлении вращения, когда крышка 223 находится в первой фазе, соответствует увеличению абсолютной величины первого приводного усилия 732. Чтобы наглядно показать увеличение абсолютной величины усилия, увеличенное первое приводное усилие 732 обозначено двойной стрелкой.
[0136] Подобные действия можно применить и к третьей фазе поворота. В частности, после обнаружения торможения или блокировки вращения процессор 442 может повышать третье значение I3 электрического тока до увеличенного третьего значения. Если после того, как увеличенное третье значение достигает третьего порога ITH3, величина перемещения оказывается все еще меньшей заданного порогового значения, процессор 442 инициирует экстренное действие. При этом в по меньшей мере некоторых вариантах осуществления настоящей технологии эти действия в третьей фазе поворота могут отсутствовать.
[0137] На изображении 902, представленном на фиг. 9, показана крышка 223, находящаяся во второй фазе поворота вокруг оси 610 вращения (то есть при θB < θ < θA), в состоянии, когда ее движение затрудняется препятствием 950. При обнаружении торможения или блокировки движения крышки 223 во второй фазе процессор может изменять электрический ток I с целью увеличения приводного усилия, действующего на крышку 223 в текущем направлении вращения. Таким образом, во второй фазе процессор 442 может уменьшать электрический ток со второго значения I2 до уменьшенного второго значения. Если после того, как уменьшенное второе значение достигает второго порога ITH2, величина перемещения оказывается все еще меньше заданного порогового значения, процессор 442 инициирует экстренное действие. Более подробное описание второго порога ITH2 приведено ниже. Следует отметить, что в данном варианте осуществления увеличение приводного усилия, действующего на крышку 223 в текущем направлении вращения, когда крышка 223 находится во второй фазе, соответствует снижению абсолютной величины второго приводного усилия 734. Чтобы наглядно показать снижение абсолютной величины усилия, второе приводное усилие 734 обозначено штриховой линией.
[0138] В данном варианте осуществления процессор, инициировав экстренное действие, может обеспечивать подачу в электродвигатель 444 четвертого электрического тока от источника электропитания для приложения к крышке четвертой приводного усилия с целью поворота крышки 223 в направлении, противоположном текущему направлению поворота. В результате крышка 223 открывается, что предотвращает ее повреждение и/или повреждение препятствия 950. Например, при выполнении экстренного действия, инициированного в первой или третьей фазе, четвертое приводное усилие создается в направлении, противоположном направлениям первого и третьего приводных усилий 732, 736. При выполнении экстренного действия, инициированного во второй фазе, четвертое приводное усилие создается в направлении, совпадающем с направлением второго приводного усилия 734. В том же или в другом варианте осуществления процессор 442 может обеспечивать фиксацию крышки 223 в заданном положении с помощью электродвигателя 444. Например, заданным положением может быть текущее положение или положение, в котором θ = θ0.
[0139] В альтернативном варианте осуществления процессор 442, инициировав экстренное действие, обеспечивает поворот крышки 223 назад и вперед заданное количество раз. Иными словами, если определяется, что в том или ином угловом положении крышки 223 было инициировано экстренное действие, процессор 442 сначала обеспечивает поворот крышки 223 в противоположном направлении на заданное количество градусов, а затем возобновляет ее поворот в первоначальном направлении вращения. Если вращение продолжает тормозиться или блокироваться препятствием 950, процессор обеспечивает повторяющееся перемещение крышки 223 назад и вперед заданное количество раз (например, три раза). Если вращение все равно продолжает тормозиться или блокироваться препятствием 950 в данном угловом положении, процессор 442 может зафиксировать крышку 223 с помощью электродвигателя 444.
[0140] На фиг. 10 показаны положения первого, второго и третьего порогов ITH1, ITH2 и ITH3 относительно номинальных значений I1, I2 и I3. В частности, первый порог ITH1 превышает по абсолютной величине I1, а его знак совпадает со знаком I1. Подобным образом, третий порог ITH3 превышает по абсолютной величине I3, а его знак совпадает со знаком I3. Наконец, второй порог ITH2 меньше I2 по абсолютной величине, а его знак совпадает со знаком I2. Изменение электрического тока на интервале от одного из номинальных значений I1, I2 и I3 до соответствующего порога ITH1, ITH2 или ITH3 может быть линейным, ступенчатым, экспоненциальным или иметь вид любой другой известной или заданной пользователем функции времени. Пороги ITH1, ITH2 и ITH3, например, среди прочего, могут иметь значения 2,7 А, -0,1 А и 2,7 А, соответственно.
[0141] На фиг. 11 представлена блок-схема способа 1100 управления крышкой роботизированного транспортного средства, например, крышкой 223, в соответствии с некоторыми вариантами осуществления настоящей технологии. Крышка, выполненная с возможностью ее перемещения электродвигателем, таким как электродвигатель 444, между открытым и закрытым положениями, обеспечивает доступ к внутреннему пространству роботизированного транспортного средства в открытом положении и предотвращает доступ туда в закрытом положении. В соответствии с одним или несколькими аспектами, способ 1100 или один или несколько его шагов могут быть реализованы вычислительным устройством, например, процессором 442. Способ 1100 или один или несколько его шагов могут быть представлены в виде исполняемых на компьютере команд, которые хранятся на машиночитаемом носителе, таком как физическое запоминающее устройство, загружаются в память и выполняются центральным процессором. Некоторые шаги или части шагов на блок-схеме могут быть исключены или их порядок может быть изменен.
Шаг 1105: подача первого электрического тока, имеющего первое значение, в электродвигатель для приложения к крышке первого усилия.
[0142] Способ 1100 предусматривает подачу в электродвигатель на шаге 1105, когда крышка находится между открытым положением и первым промежуточным положением, заданным между открытым и закрытым положениями, первого электрического тока, имеющего первое значение (например, I1), для приложения к крышке первого усилия. Первым усилием может быть приводное усилие, приводящее крышку во вращение вокруг оси вращения. В данном варианте осуществления открытое положение соответствует углу θ = θ0 = 90 градусов относительно горизонтальной плоскости (или 0 градусов относительно вертикальной плоскости), а первое промежуточное положение - углу θ = θA = 50 градусов относительно горизонтальной плоскости.
[0143] В по меньшей мере некоторых вариантах осуществления роботизированное транспортное средство дополнительно содержит энкодер, связанный с процессором. Процессор контролирует величину перемещения крышки, используя информацию, предоставляемую энкодером. Величина перемещения характеризуется такими параметрами текущего перемещения крышки, как угловое положение крышки, частота вращения электродвигателя крышки, ускорение крышки и/или любые другие параметры, относящиеся к приводу крышки.
[0144] В данном варианте осуществления в первой фазе, если величина перемещения оказывается меньшей первой заданной величины перемещения (например, из-за торможения или блокировки вращения препятствием), процессор может повышать первое значение первого электрического тока до увеличенного первого значения для приложения увеличенного первого усилия к крышке. Увеличенное первое значение превышает первое значение по абсолютной величине.
[0145] Кроме того, если увеличенное первое значение оказывается равным первому пороговому значению (например, ITH1), процессор может инициировать экстренное действие. Более подробное описание экстренного действия приведено ниже.
Шаг 1110: подача второго электрического тока, имеющего второе значение, в электродвигатель для приложения к крышке второго усилия.
[0146] Способ 1100 дополнительно предусматривает подачу на шаге 1110, когда крышка находится между первым промежуточным положением и вторым промежуточным положением, заданным между первым промежуточным положением и закрытым положением, второго электрического тока, имеющего второе значение, в электродвигатель для приложения к крышке второго усилия. В данном варианте осуществления второе промежуточное положение соответствует углу θ = θB = 10 градусов относительно горизонтальной плоскости.
[0147] В данном варианте осуществления знак второго значения противоположен знаку первого значения. В связи с этим второе усилие действует в направлении, противоположном направлению первого усилия. В некоторых вариантах осуществления крышка способна вращаться вокруг горизонтальной оси между открытым и закрытым положениями, вследствие чего второе усилие, приложенное к крышке, частично уравновешивает силу тяжести, действующую на крышку между первым промежуточным положением и вторым промежуточным положением. Вторым усилием может быть, например, приводное усилие.
[0148] В данном варианте осуществления во второй фазе, если величина перемещения оказывается меньшей второй заданной величины перемещения (например, из-за торможения или блокировки вращения препятствием), процессор может снижать второе значение второго электрического тока до уменьшенного второго значения для приложения уменьшенного второго усилия к крышке. Уменьшенное второе значение меньше второго значения по абсолютной величине.
[0149] Кроме того, если уменьшенное второе значение оказывается равным второму пороговому значению (например, ITH2), процессор может инициировать экстренное действие.
Шаг 1115: подача третьего электрического тока, имеющего третье значение, в электродвигатель для приложения третьего усилия к крышке.
[0150] Способ 1100 дополнительно предусматривает подачу на шаге 1115, когда крышка находится между вторым промежуточным положением и закрытым положением, третьего электрического тока, имеющего третье значение, в электродвигатель для приложения третьего усилия к крышке. В данном варианте осуществления закрытое положение соответствует углу θ = 0. После достижения закрытого положения крышка может запираться в этом положении, например, системой запирания.
[0151] В данном варианте осуществления знак третьего значения совпадает со знаком первого значения, в связи с чем третье усилие действует в направлении, совпадающем с направлением первого усилия. Третье значение может превышать первое значение, поэтому первое усилие по величине может быть меньшим третьего усилия.
[0152] В некоторых вариантах осуществления первое и третье значения являются положительными, а второе значение - отрицательным. В альтернативных вариантах осуществления первое и третье значения являются отрицательными, а второе значение - положительным.
[0153] В данном варианте осуществления в третьей фазе, если величина перемещения оказывается меньшей третьей заданной величины перемещения (например, из-за торможения или блокировки вращения препятствием), процессор может повышать третье значение третьего электрического тока до увеличенного третьего значения для приложения увеличенного третьего усилия к крышке. Увеличенное третье значение превышает третье значение по абсолютной величине.
[0154] Кроме того, если увеличенное третье значение оказывается равным третьему пороговому значению (например, ITH3), процессор может инициировать экстренное действие.
[0155] Ниже перечислены иллюстративные экстренные действия, которые могут быть инициированы. В одном из вариантов осуществления процессор, инициировав экстренное действие, обеспечивает подачу в электродвигатель четвертого электрического тока, имеющего четвертое значение, для приложения четвертого усилия к крышке. Четвертое значение задается таким образом, чтобы четвертое приводное усилие, прилагаемое электродвигателем к крышке, вызывало поворот крышки в направлении, противоположном текущему направлению поворота.
[0156] В частности, при выполнении экстренного действия, инициированного во второй фазе, знак четвертого значения совпадает со знаком уменьшенного второго значения, а абсолютная величина четвертого значения превышает абсолютную величину второго значения. Соответственно, четвертое усилие действует в том же направлении, что и второе усилие.
[0157] При выполнении экстренного действия, инициированного в первой или третьей фазе, знак четвертого значения противоположен знаку уменьшенного первого или третьего значения, соответственно. Следовательно, четвертое усилие действует в направлении, противоположном направлению первого и третьего усилий.
[0158] В альтернативном варианте осуществления процессор, инициировав экстренное действие, обеспечивает поворот крышки назад и вперед заданное количество раз. Иными словами, если определяется, что в некотором угловом положении крышки было инициировано экстренное действие, процессор сначала обеспечивает поворот крышки в противоположном направлении на заданное количество градусов, а затем возобновляет ее поворот в первоначальном направлении вращения. То есть можно утверждать, что электрический ток, подаваемый в электродвигатель, изменяется заданное количество раз между заданным значением и пороговым значением тока.
[0159] Если вращение продолжает тормозиться или блокироваться препятствием, процессор обеспечивает повторяющееся перемещение крышки назад и вперед заданное количество раз (например, три раза). Если вращение все равно продолжает тормозиться или блокироваться препятствием в данном угловом положении, то процессор может зафиксировать крышку с помощью электродвигателя. Например, после инициирования экстренного действия крышка может быть установлена в заданное положение (например, в открытое положение) и удерживаться в этом положении. В другом варианте после инициирования экстренного действия крышка может быть зафиксирована в текущем положении.
[0160] Таким образом, в некоторых вариантах осуществления экстренное действие обеспечивает по меньшей мере частичное открывание крышки, чтобы предотвратить повреждение крышки и/или препятствия, блокирующего ее вращение.
[0161] Для специалиста в данной области могут быть очевидными возможные изменения и усовершенствования описанных выше вариантов осуществления настоящей технологии.
[0162] Предшествующее описание приведено лишь в иллюстративных целях, а не для ограничения объема изобретения. Объем охраны настоящей технологии определяется исключительно объемом приложенной формулы изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| РОБОТИЗИРОВАННОЕ ТРАНСПОРТНОЕ СРЕДСТВО И ОПОРНЫЙ УЗЕЛ ЕГО КОЛЕСА | 2022 |
|
RU2830639C2 |
| ОТКРЫВАЮЩИЙ МЕХАНИЗМ КРЫШКИ РОБОТИЗИРОВАННОГО ТРАНСПОРТНОГО СРЕДСТВА | 2021 |
|
RU2810933C2 |
| УСТРОЙСТВО ДЛЯ РЕГУЛИРОВАНИЯ ПРИВОДЯЩЕГО УСИЛИЯ ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 2020 |
|
RU2731587C1 |
| Роботизированное транспортное средство для доставки товаров | 2023 |
|
RU2829939C1 |
| СПОСОБ (ВАРИАНТЫ) И СИСТЕМА ДЛЯ ЗАПРОСА НА ЗАПРАВКУ ТОПЛИВОМ ТОПЛИВНОГО БАКА | 2017 |
|
RU2706628C2 |
| Колесный узел для роботизированного транспортного средства и оснащенное им роботизированное транспортное средство. | 2023 |
|
RU2831446C1 |
| Способ управления роботизированным транспортным средством | 2021 |
|
RU2808469C2 |
| УСТРОЙСТВО ДЛЯ ПОДКЛЮЧЕНИЯ АККУМУЛЯТОРНОЙ БАТАРЕИ САМОУПРАВЛЯЕМОГО ТРАНСПОРТНОГО СРЕДСТВА | 2021 |
|
RU2810932C2 |
| СПОСОБ УПРАВЛЕНИЯ РОБОТОМ-ИНВЕНТАРИЗАТОРОМ | 2023 |
|
RU2839294C1 |
| ХИРУРГИЧЕСКАЯ СИСТЕМА С СЕНСОРНЫМ ВОСПРИЯТИЕМ ДЛЯ РОБОТИЗИРОВАННОЙ ЛАПАРОСКОПИЧЕСКОЙ ХИРУРГИИ | 2021 |
|
RU2835514C1 |
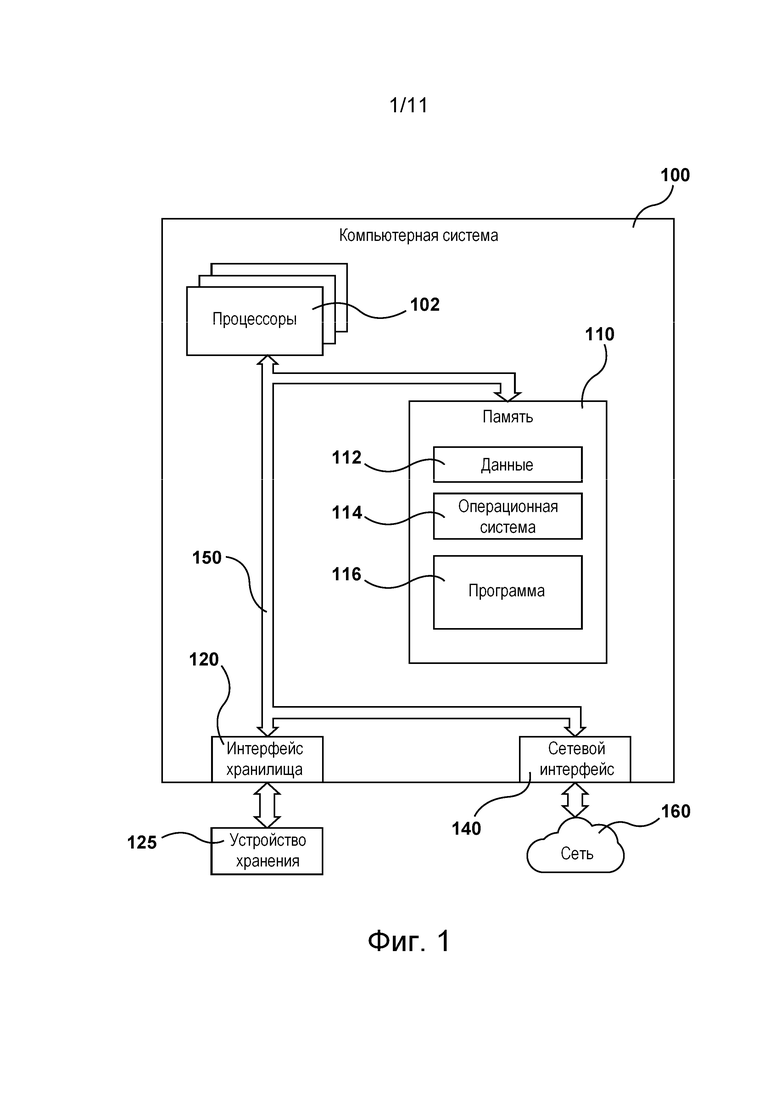
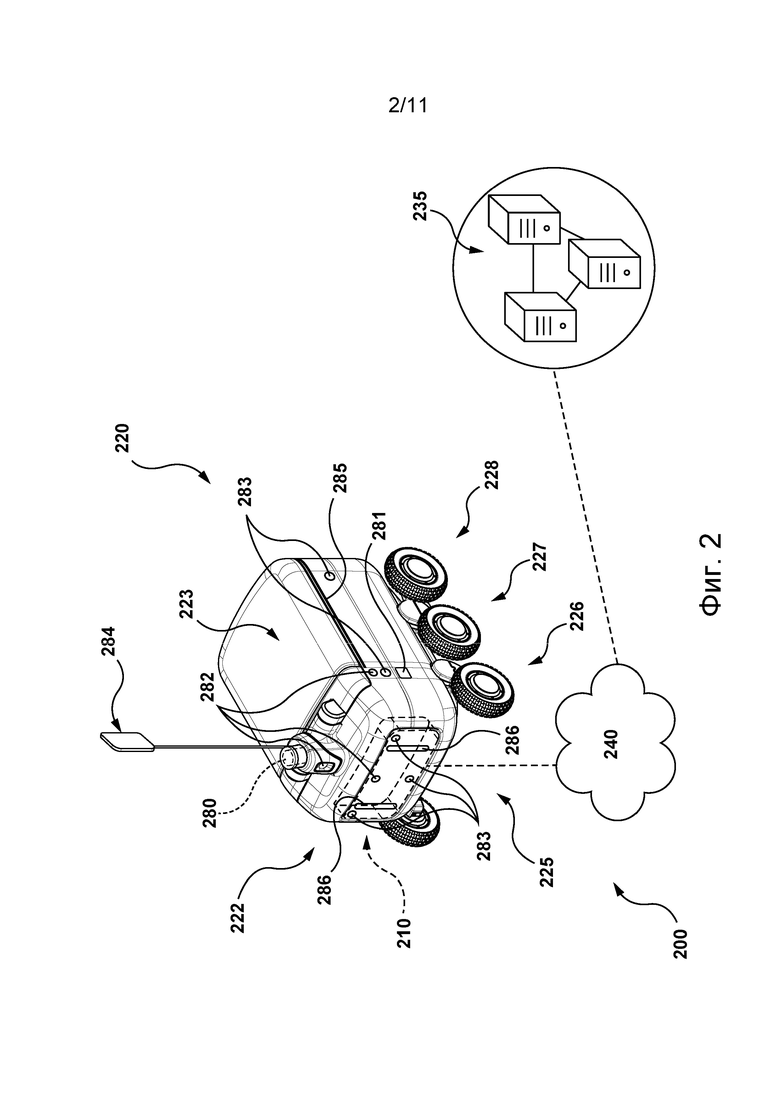
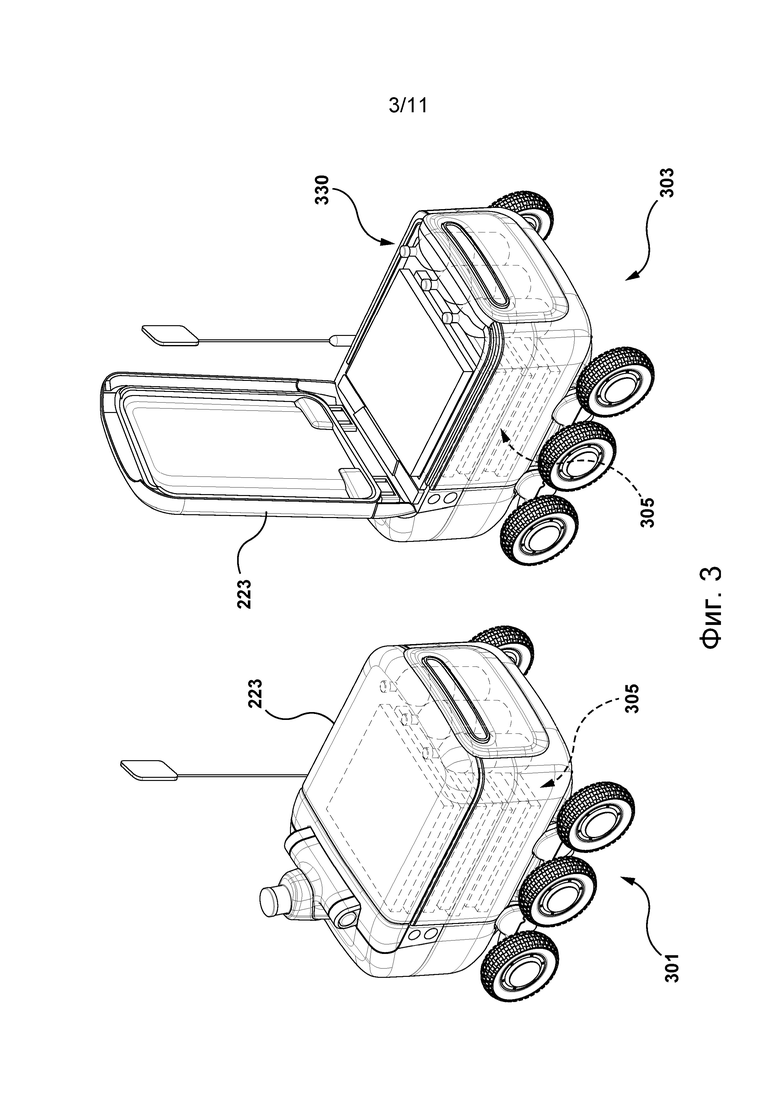
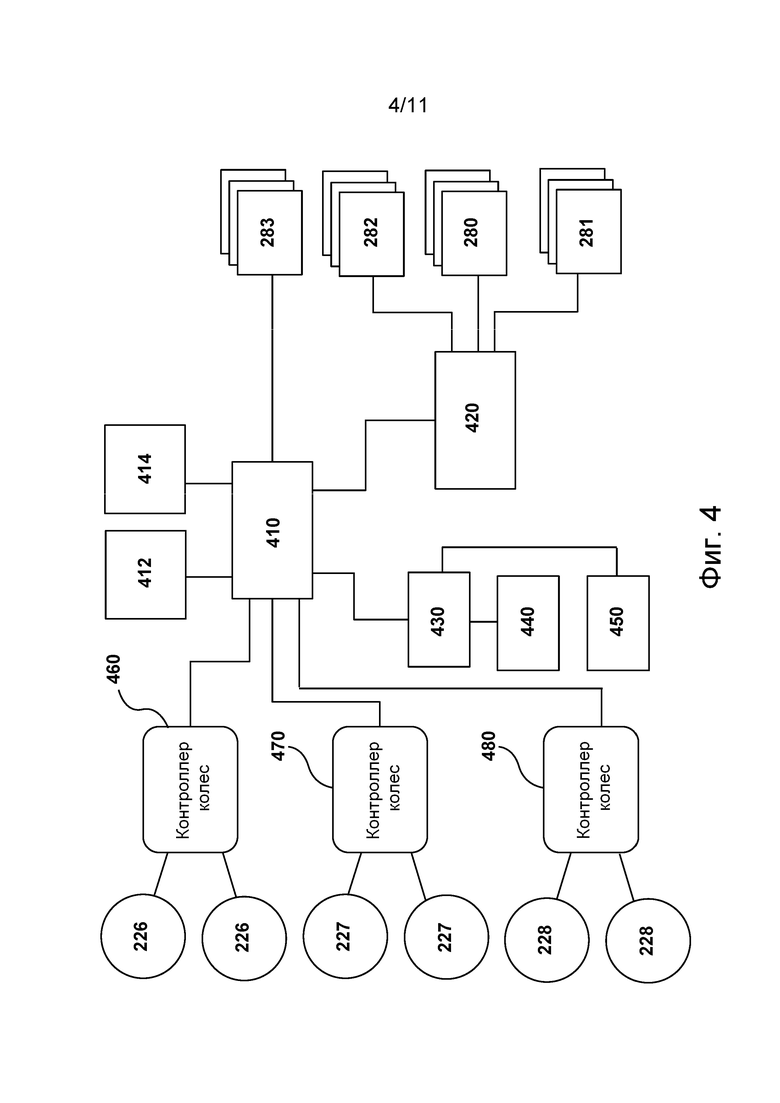
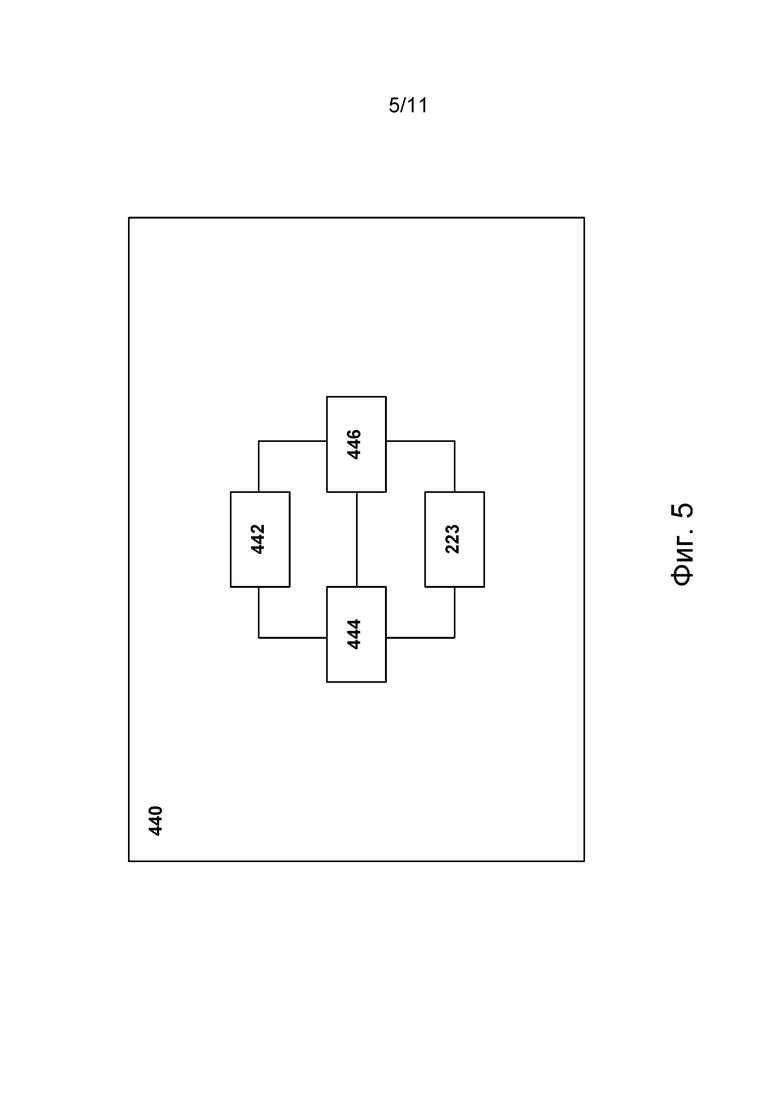
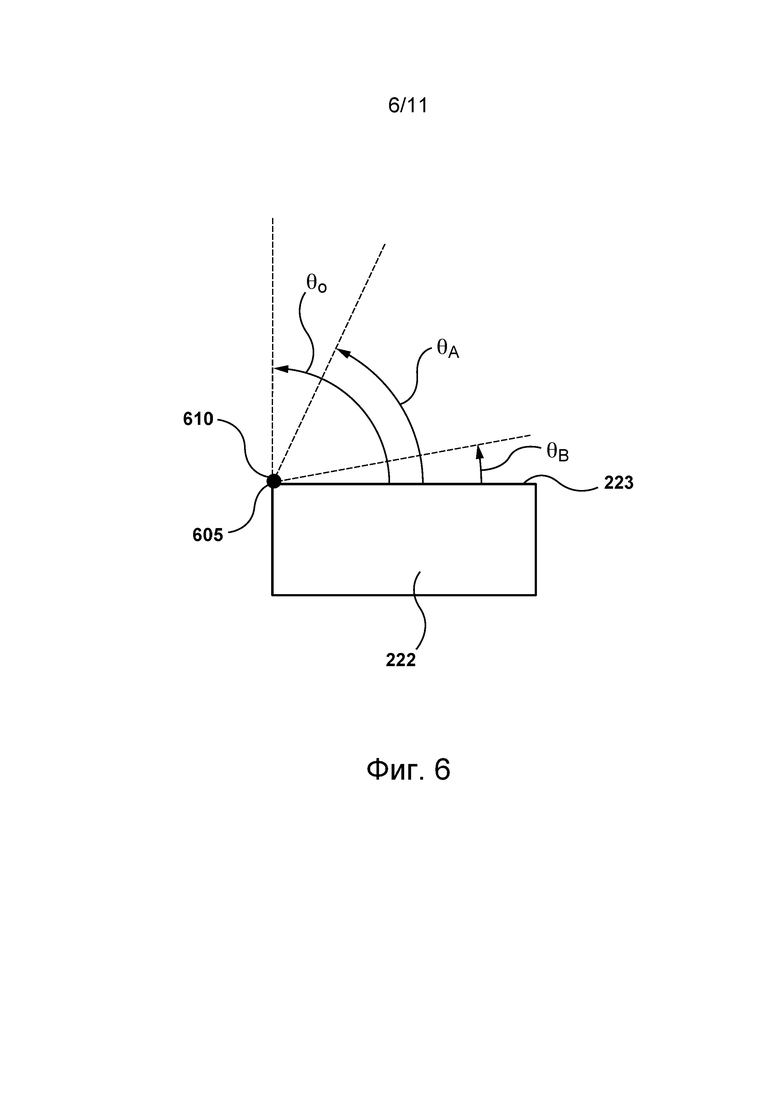
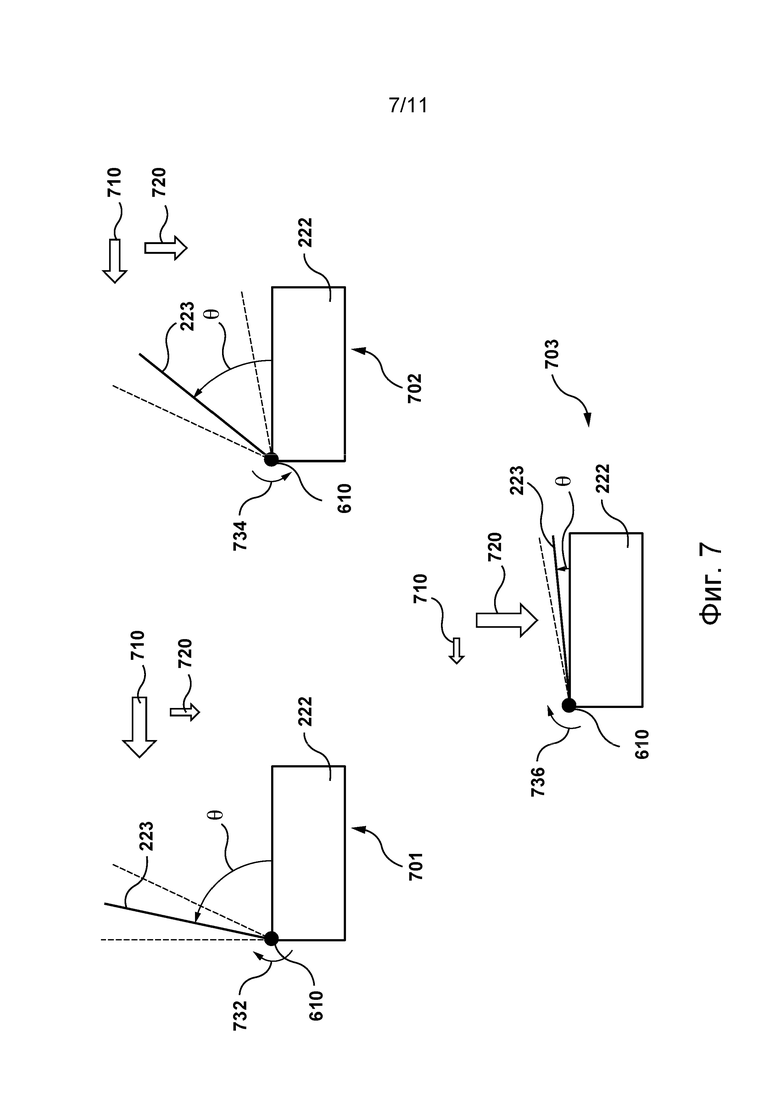
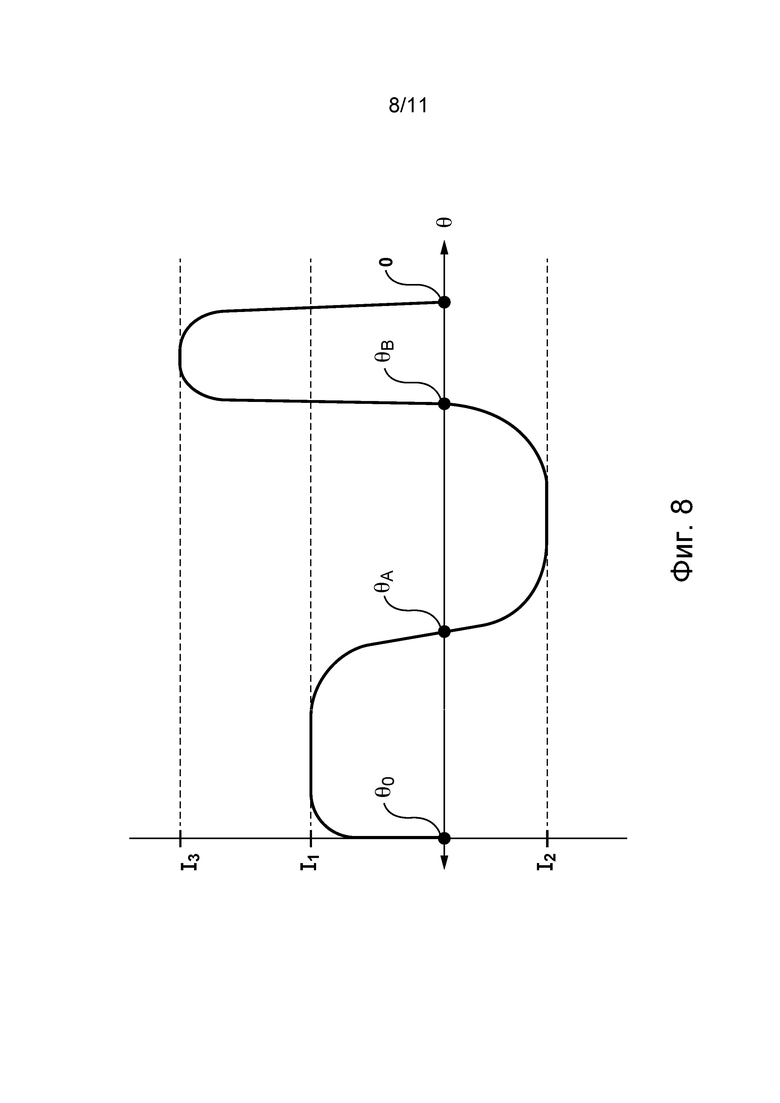
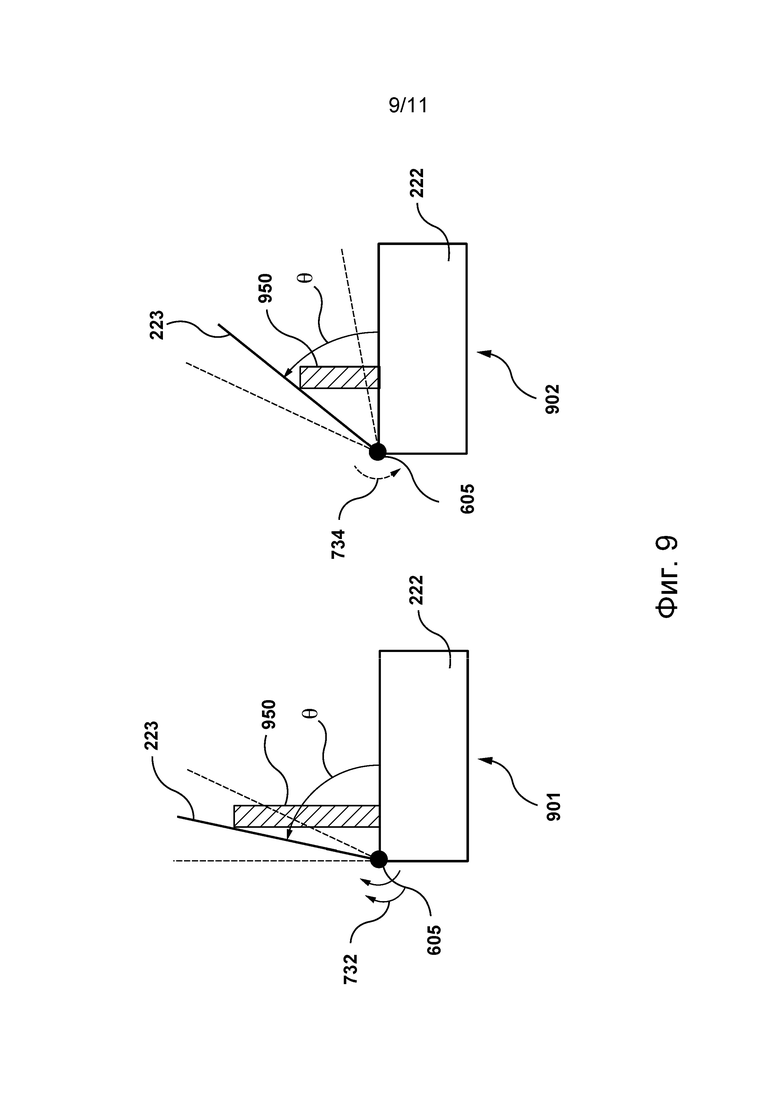
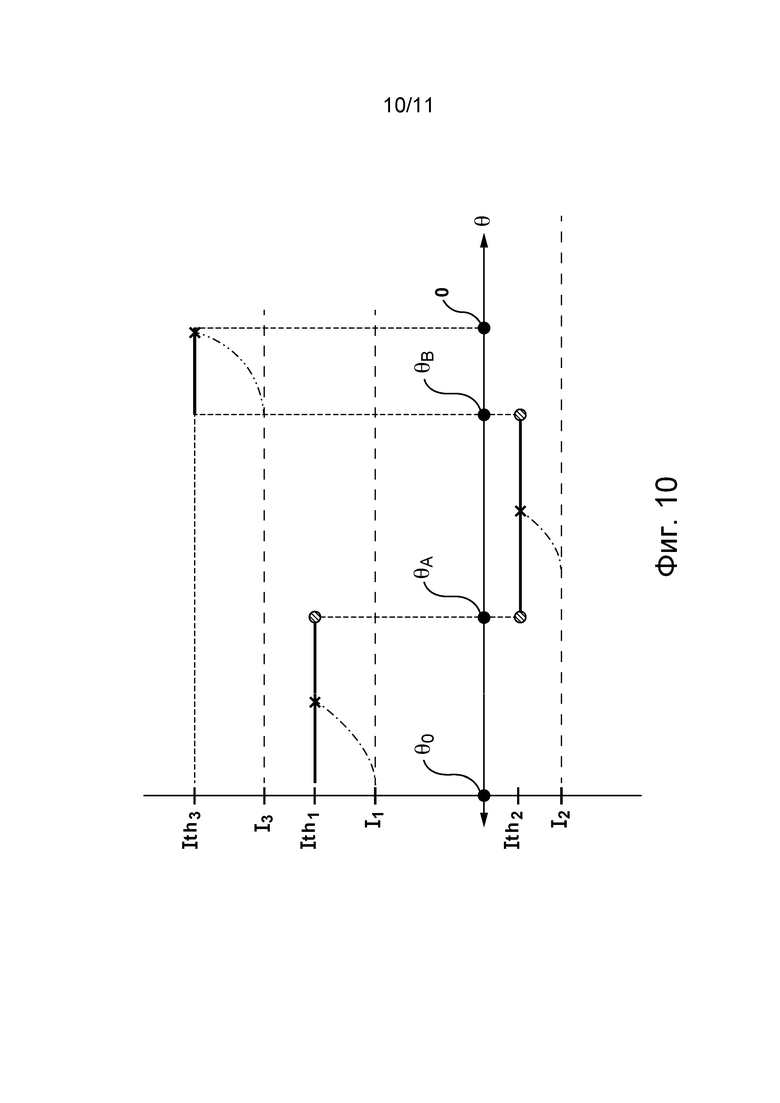
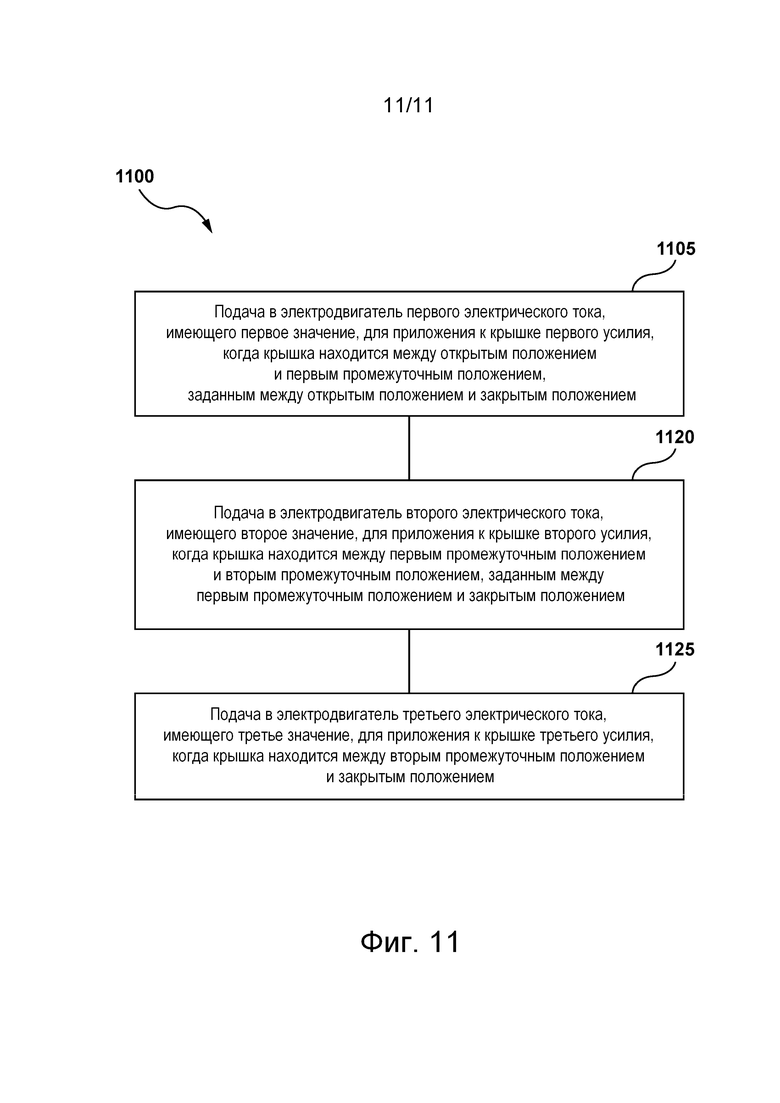
Группа изобретений относится к роботизированным транспортным средствам, в частности к механизмам управления их крышками. Роботизированное транспортное средство содержит корпус, образующий внутреннее пространство, управляемую крышку для обеспечения доступа к внутреннему пространству, источник электропитания и процессор. Процессор управляет работой крышки и обеспечивает подачу от источника электропитания в двигатель первого электрического тока, имеющего первое значение, для приложения к крышке первого усилия, когда крышка находится между открытым положением и первым промежуточным положением, заданным между открытым положением и закрытым положением, подачу от источника электропитания в двигатель второго электрического тока, имеющего второе значение, для приложения к крышке второго усилия, и подачу от источника электропитания в двигатель третьего электрического тока, имеющего третье значение. Достигается обеспечение беспрепятственного движения крышки роботизированного транспортного средства и ее бесперебойное функционирование. 2 н. и 30 з.п. ф-лы, 11 ил.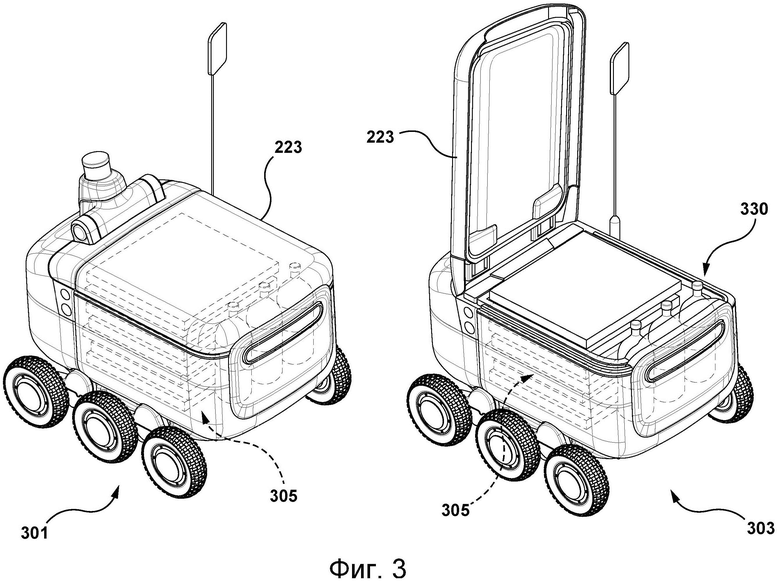
1. Способ управления крышкой роботизированного транспортного средства, выполненной с возможностью ее перемещения двигателем между открытым положением и закрытым положением, обеспечивающей доступ к внутреннему пространству роботизированного транспортного средства в открытом положении и предотвращающей доступ к этому внутреннему пространству в закрытом положении, при этом способ содержит:
- подачу в двигатель первого электрического тока, имеющего первое значение, для приложения к крышке первого усилия, когда крышка находится между открытым положением и первым промежуточным положением, заданным между открытым положением и закрытым положением;
- подачу в двигатель второго электрического тока, имеющего второе значение, знак которого противоположен знаку первого значения, для приложения к крышке второго усилия, действующего в направлении, противоположном направлению первого усилия, когда крышка находится между первым промежуточным положением и вторым промежуточным положением, заданным между первым промежуточным положением и закрытым положением;
- подачу в двигатель третьего электрического тока, имеющего третье значение, знак которого совпадает со знаком первого значения, для приложения к крышке третьего усилия, действующего в направлении, совпадающем с направлением первого усилия, когда крышка находится между вторым промежуточным положением и закрытым положением.
2. Способ по п. 1, в котором крышка выполнена с возможностью ее вращения вокруг горизонтальной оси между открытым положением и закрытым положением, а второе усилие прикладывается к крышке с целью частичного уравновешивания силы тяжести, действующей на крышку между первым промежуточным положением и вторым промежуточным положением.
3. Способ по п. 1, в котором первое и третье значения являются положительными, а второе значение - отрицательным.
4. Способ по п. 1, в котором первое и третье значения являются отрицательными, а второе значение - положительным.
5. Способ по п. 1, в котором первое значение меньше третьего значения, а первое усилие меньше третьего усилия.
6. Способ по п. 1, дополнительно содержащий запирание крышки в закрытом положении.
7. Способ по п. 1, дополнительно содержащий контроль величины перемещения крышки между открытым положением и закрытым положением и, если величина перемещения оказывается меньшей заданной величины перемещения:
- повышение первого значения первого электрического тока до увеличенного первого значения, по абсолютной величине превышающего первое значение, при нахождении крышки между открытым положением и первым промежуточным положением для приложения к крышке увеличенного первого усилия;
- инициирование экстренного действия, если увеличенное первое значение оказывается равным первому пороговому значению.
8. Способ по п. 1, дополнительно содержащий контроль величины перемещения крышки между открытым положением и закрытым положением и, если величина перемещения оказывается меньшей заданной величины перемещения:
- снижение второго значения второго электрического тока до уменьшенного второго значения, по абсолютной величине меньшего второго значения, при нахождении крышки между первым промежуточным положением и вторым промежуточным положением для приложения к крышке уменьшенного второго усилия;
- инициирование экстренного действия, если уменьшенное второе значение оказывается равным второму пороговому значению.
9. Способ по п. 8, в котором инициирование экстренного действия предусматривает подачу в двигатель четвертого электрического тока, имеющего четвертое значение, знак которого совпадает со знаком уменьшенного второго значения, а абсолютная величина превышает абсолютную величину второго значения, для приложения к крышке четвертого усилия, действующего в направлении, совпадающем с направлением второго усилия.
10. Способ по п. 8, в котором инициирование экстренного действия предусматривает установку крышки в открытое положение и ее удержание в этом положении.
11. Способ по п. 8, в котором инициирование экстренного действия предусматривает фиксацию крышки.
12. Способ по п. 11, в котором инициирование экстренного действия дополнительно предусматривает изменение второго значения второго электрического тока между номинальным значением и уменьшенным вторым значением заданное количество раз.
13. Способ по п. 1, в котором крышка в закрытом положении располагается под углом 0 градусов к горизонтальной плоскости.
14. Способ по п. 1, в котором крышка во втором промежуточном положении располагается под углом 10 градусов к горизонтальной плоскости.
15. Способ по п. 1, в котором крышка в первом промежуточном положении располагается под углом 50 градусов к горизонтальной плоскости.
16. Способ по п. 1, в котором крышка в открытом положении располагается под углом 0 градусов к вертикальной плоскости.
17. Роботизированное транспортное средство, содержащее:
- корпус, образующий внутреннее пространство;
- управляемую крышку для обеспечения доступа к внутреннему пространству;
- источник электропитания;
- процессор, способный управлять работой крышки и обеспечивающий:
- подачу от источника электропитания в двигатель первого электрического тока, имеющего первое значение, для приложения к крышке первого усилия, когда крышка находится между открытым положением и первым промежуточным положением, заданным между открытым положением и закрытым положением;
- подачу от источника электропитания в двигатель второго электрического тока, имеющего второе значение, знак которого противоположен знаку первого значения, для приложения к крышке второго усилия, действующего в направлении, противоположном направлению первого усилия, когда крышка находится между первым промежуточным положением и вторым промежуточным положением, заданным между первым промежуточным положением и закрытым положением;
- подачу от источника электропитания в двигатель третьего электрического тока, имеющего третье значение, знак которого совпадает со знаком первого значения, для приложения к крышке третьего усилия, действующего в направлении, совпадающем с направлением первого усилия, когда крышка находится между вторым промежуточным положением и закрытым положением.
18. Роботизированное транспортное средство по п. 17, в котором крышка способна вращаться вокруг горизонтальной оси между открытым положением и закрытым положением, а второе усилие прикладывается к крышке с целью частичного уравновешивания силы тяжести, действующей на крышку между первым промежуточным положением и вторым промежуточным положением.
19. Роботизированное транспортное средство по п. 17, в котором первое и третье значения являются положительными, а второе значение - отрицательным.
20. Роботизированное транспортное средство по п. 17, в котором первое и третье значения являются отрицательными, а второе значение - положительным.
21. Роботизированное транспортное средство по п. 17, в котором первое значение меньше третьего значения, а первое усилие меньше третьего усилия.
22. Роботизированное транспортное средство по п. 17, в котором процессор дополнительно способен запирать крышку в закрытом положении.
23. Роботизированное транспортное средство по п. 17, в котором процессор дополнительно способен контролировать величину перемещения крышки между открытым положением и закрытым положением и, если величина перемещения оказывается меньшей заданной величины перемещения:
- повышать первое значение первого электрического тока до увеличенного первого значения, по абсолютной величине превышающего первое значение, при нахождении крышки между открытым положением и первым промежуточным положением для приложения к крышке увеличенного первого усилия;
- инициировать экстренное действие, если увеличенное первое значение оказывается равным первому пороговому значению.
24. Роботизированное транспортное средство по п. 17, в котором процессор дополнительно способен контролировать величину перемещения крышки между открытым положением и закрытым положением и, если величина перемещения оказывается меньшей заданной величины перемещения:
- снижать второе значение второго электрического тока до уменьшенного второго значения, абсолютной величине меньшего второго значения, при нахождении крышки между первым промежуточным положением и вторым промежуточным положением для приложения к крышке уменьшенного второго усилия;
- инициировать экстренное действие, если уменьшенное второе значение оказывается равным второму пороговому значению.
25. Роботизированное транспортное средство по п. 24, в котором процессор при инициировании экстренного действия дополнительно способен обеспечивать подачу в двигатель четвертого электрического тока, имеющего четвертое значение, знак которого совпадает со знаком уменьшенного второго значения, а абсолютная величина превышает абсолютную величину второго значения, для приложения к крышке четвертого усилия, действующего в направлении, совпадающем с направлением второго усилия.
26. Роботизированное транспортное средство по п. 24, в котором при инициировании экстренного действия процессор дополнительно способен обеспечивать установку крышки в открытое положение и ее удержание в этом положении с помощью двигателя.
27. Роботизированное транспортное средство по п. 24, в котором при инициировании экстренного действия процессор дополнительно способен обеспечивать фиксацию крышки с помощью двигателя.
28. Роботизированное транспортное средство по п. 27, в котором при инициировании экстренного действия процессор дополнительно способен обеспечивать изменение второго значения второго электрического тока двигателя между номинальным значением и уменьшенным вторым значением заданное количество раз.
29. Роботизированное транспортное средство по п. 17, в котором крышка в закрытом положении расположена под углом 0 градусов к горизонтальной плоскости.
30. Роботизированное транспортное средство по п. 17, в котором крышка во втором промежуточном положении расположена под углом 10 градусов к горизонтальной плоскости.
31. Роботизированное транспортное средство по п. 17, в котором крышка в первом промежуточном положении расположена под углом 50 градусов к горизонтальной плоскости.
32. Роботизированное транспортное средство по п. 17, в котором крышка в открытом положении расположена под углом 0 градусов к вертикальной плоскости.
| US 2019337706 A1, 07.11.2019 | |||
| CN 109984679 A, 09.07.2019 | |||
| CN 210046682 U, 11.02.2020 | |||
| US 9535421 B1, 03.01.2017 | |||
| US 2020209821 A1, 02.07.2020. |

