Изобретение относится к длинномерным элементам строительных конструкций, изготовленных из бетона с внутренней арматурой, и может быть использовано при изготовлении стоек опор контактной сети, мониторинг состояния которой предполагается осуществлять с помощью беспилотных летательных аппаратов.
Известна армобетонная стойка опоры контактной сети (RU 169486, Е04Н 12/16, 21.03.2017), и состоящая из арматурного каркаса в форме усеченного конуса из бетона, армированного преднапряженной композитной арматурой, например, из базальтопластика, стеклопластика, в количестве двенадцати стержней диаметром 15 мм. Поверх преднапряженной композитной арматуры смонтирована поперечная спиральная ненапрягаемая композитная арматура диаметром 2-5 мм.
Данное устройство предназначено только для поддержания и фиксирования проводов контактной сети, что определяет его узкий функциональный диапазон.
Известна стойка опоры контактной сети (RU 2806649, Е04Н 12/16, H02J 7/00. 02.11.2023), выбранная в качестве прототипа и состоящая из арматурного каркаса в форме усеченного конуса из бетона, армированного преднапряженной композитной арматурой из стержней и поперечной спиральной ненапряженной композитной арматуры, смонтированной поверх преднапряженной композитной арматуры, на верхушке стойки опоры контактной сети жестко закреплены своими нижними фланцами два проходных изолятора с токоведущими стержнями, к верхним фланцам проходных изоляторов жестко прикреплен вертикально расположенный каркас катушки, выводы обмотки которой подключены к верхним концам токоведущих стержней, нижние концы токоведущих стержней предназначены для соединения с контактным проводом и рельсом.
Недостатком прототипа является узкий функциональный диапазон, что обусловлено тем, что эта стойка опоры контактной сети предназначена только для заряда аккумуляторной батареи во время пролета беспилотного летательного аппарата через внутренний проход вертикального каркаса катушки, жестко закрепленного на вершине стойки опоры контактной сети.
Задача изобретения - расширение функционального диапазона стойки опоры контактной сети за счет дополнительной функции, связанной с возможностью приземления беспилотного летательного аппарата на вершине стойки опоры контактной сети с одновременным зарядом бортовой аккумуляторной батареи беспилотного летательного аппарата мультикоптерного типа.
Технический результат достигается тем, что в стойке опоры контактной сети, содержащей арматурный каркас в форме усеченного конуса из бетона, армированного преднапряженной композитной арматурой из стержней и поперечной спиральной ненапряженной композитной арматуры, смонтированной поверх преднапряженной композитной арматуры, на верхушке стойки опоры контактной сети жестко закреплены своими нижними фланцами два проходных изолятора с токоведущими стержнями, к верхним фланцам проходных изоляторов жестко прикреплен своим корпусом бокс со сферическим верхним куполом, а корпус бокса имеет плоское днище коробчатого типа, нижняя крышка которого жестко прикреплена к верхним фланцам проходных изоляторов, в нижней крышке плоского днища коробчатого типа выполнены отверстия, через которые проходят токоведущие стержни проходных изоляторов, боковая поверхность корпуса бокса состоит из двух полых полуцилиндров, причем радиус боковой поверхности первого полуцилиндра больше радиуса боковой поверхности второго полуцилиндра, нижняя кромка первого полуцилиндра жестко прикреплена к краю верхней крышки плоского днища коробчатого типа, на внешней поверхности верхней крышки плоского днища коробчатого типа жестко закреплена круговая направляющая подвижного соединения второго цилиндра с радиусом меньшим, чем радиус боковой поверхности первого полуцилиндра, а подвижные каретки круговой направляющей жестко закреплены на нижней кромке второго полуцилиндра, во внутренней полости плоского днища коробчатого типа жестко закреплен реверсивный поворотный электрический двигатель, вал которого проходит через отверстие в верхней крышке плоского днища коробчатого типа, на конце вала жестко закреплено обрезиненное колесо, находящееся в механическом контакте с боковой поверхностью второго цилиндра, вход реверсивного поворотного электрического двигателя соединен с первым силовым выходом преобразователя, жестко закрепленного во внутренней полости плоского днища коробчатого типа, второй силовой выход преобразователя соединен с первым входом переключающего устройства, а второй вход переключающего устройства соединен с выводами резервного источника питания, к выводам резервного источника питания подключено зарядное устройство, соединенное с третьим силовым выходом преобразователя, выход переключающего устройства соединен с входом блока контроля уровня заряда, выходы которого соединены с кольцеобразным электродом и круговым электродом, находящимся внутри кольцеобразного электрода, кольцеобразный и круговой электроды жестко закреплены на наружной поверхности верхней крышки плоского днища коробчатого типа, силовые входы преобразователя через отверстия в нижней крышке плоского днища коробчатого типа соединены с верхними концами токоведущих стержней, вход управления преобразователя соединен с выходом микроконтроллера, расположенного во внутренней полости плоского днища коробчатого типа, к первому информационному входу микроконтроллера подключен индуктивный датчик, расположенный на ограничителе, жестко закрепленном на кромке боковой поверхности первого полуцилиндра, ответно индуктивному датчику на кромке боковой поверхности второго полуцилиндра жестко закреплен постоянный магнит и симметрично ему на другой кромке боковой поверхности второго полуцилиндра жестко закреплен такой же постоянный магнит, ко второму информационному входу микропроцессора подключен датчик присутствия, установленный на внешней поверхности верхней крышки плоского днища коробчатого типа, с третьим информационным входом микропроцессора соединен приемник радиосигналов, расположенный внутри плоского днища коробчатого типа.
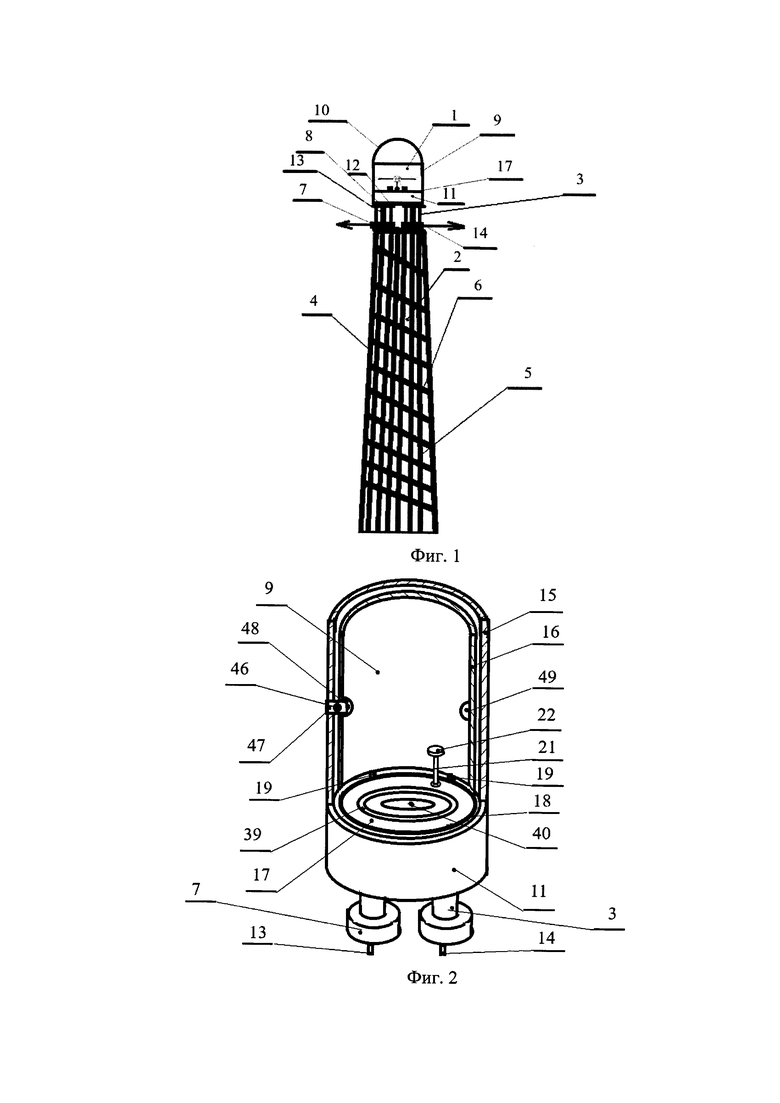
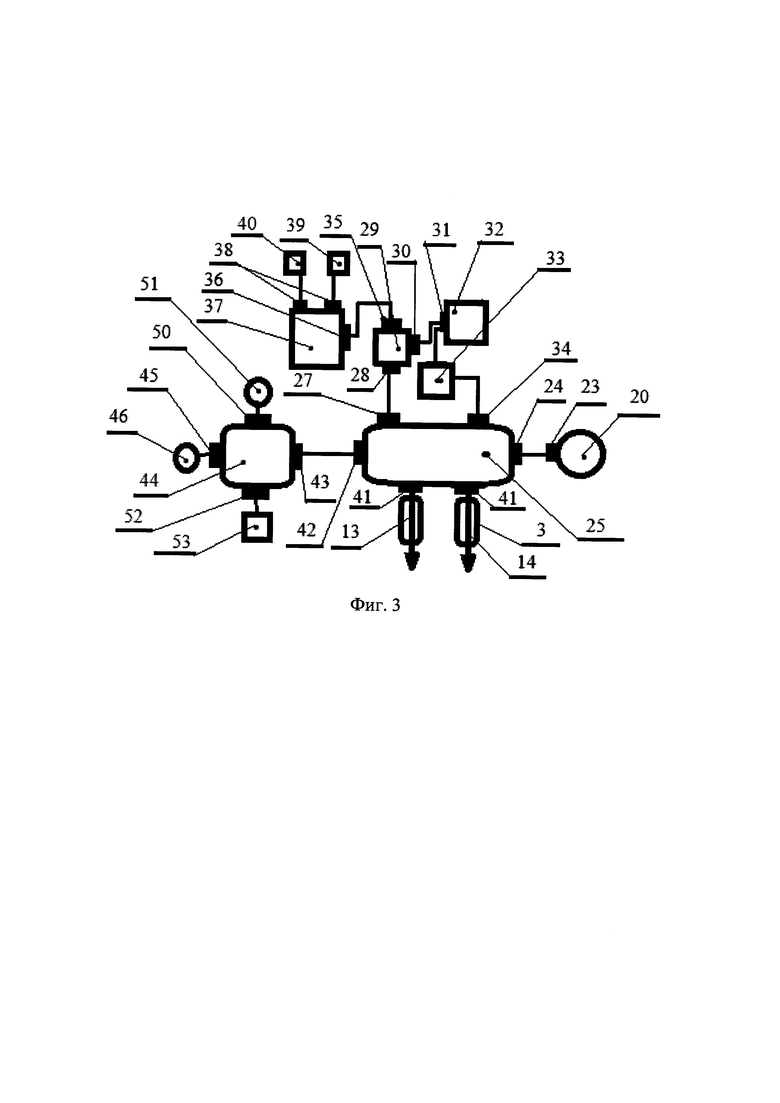
На фиг. 1 показана стойка опоры контактной сети с боксом, внутри которого находится беспилотный летательный аппарат, на фиг.2 приведен общий вид корпуса бокса со снятым сферическим верхним куполом, а на фиг.3 - блок-схема электрической части бокса.
Бокс 1 (фиг. 1) жестко закрепляется на вершине стойки опоры контактной сети 2 с помощью проходных изоляторов 3, например типа ОСК 3-10-2 УХЛ1 или ИОСК 3/35 УХЛ1 или ИОСК 3/35-В УХЛ1.
Стойка опоры контактной сети 2 состоит из арматурного каркаса 4 (фиг. 1) в форме усеченного конуса из бетона, армированного преднапряженной композитной арматурой 5 из стержней, изготовленных например, из базальтопластика, стеклопластика. Поверх преднапряженной композитной арматуры 5 смонтирована поперечная спиральная ненапряженная композитная арматура 6. На вершине арматурного каркаса 4 жестко закреплены своими нижними фланцами 7 два проходных изолятора 3, к верхним фланцам 8 которых жестко прикреплен бокс 1. Наверху корпуса 9 бокса 1 жестко закреплен сферический верхний купол 10, а снизу корпуса 9 прикреплено плоское днище коробчатого типа 11, нижняя крышка 12 которого жестко прикреплена к верхним фланцам 8 проходных изоляторов 3. В нижней крышке 12 (фиг. 2) плоского днища коробчатого типа 11 выполнены отверстия, через которые проходят токоведущие стержни 13 и 14 проходных изоляторов 3. Корпус 9 (фиг. 2) состоит из двух полых полуцилиндров 15 и 16, причем радиус боковой поверхности первого полуцилиндра 15 больше радиуса боковой поверхности второго полуцилиндра 16. Нижняя кромка первого полуцилиндра 15 жестко прикреплена к краю верхней крышки 17 плоского днища коробчатого типа 11. На внешней поверхности верхней крышки 17 плоского днища коробчатого типа 11 жестко закреплена круговая направляющая 18 подвижного соединения второго полуцилиндра 16, а подвижные каретки 19 круговой направляющей 18 жестко закреплены на нижней кромке второго полуцилиндра 16. Во внутренней полости плоского днища коробчатого типа 11 жестко закреплен реверсивный поворотный электродвигатель 20, вал 21 которого проходит через отверстие в верхней крышке 17 плоского днища коробчатого типа 11. На конце вала 21 жестко закреплено обрезиненное колесо 22, находящееся в механическом контакте с боковой поверхностью второго цилиндра 16. Вход 23 (фиг.3) реверсивного поворотного электрического двигателя 20 соединен с первым силовым выходом 24 преобразователя 25, например, тип Emas MK1MIM2 или IEK КВ-8168 или Emas 440В, 10А. MN2MIM2, жестко закрепленного во внутренней полости плоского днища коробчатого типа 11. Второй силовой выход 27 преобразователя 25 соединен с первым входом 28 переключающего устройства 29, а второй вход 30 переключающего устройства 29 соединен с выводами 31 резервного источника питания 32, например аккумуляторной батареи. К выводам 31 резервного источника питания 32 подключено зарядное устройство 33, соединенное с третьим силовым выходом 34 преобразователя 25. Выход 35 переключающего устройства 29 соединен с входом 36 блока контроля уровня заряда 37, выходы 38 которого соединены с кольцеобразным электродом 39 и круговым электродом 40, находящимся внутри кольцеобразного электрода 39. Кольцеобразный 39 (фиг. 2) и круговой 40 электроды жестко закреплены на наружной поверхности верхней крышки 17 плоского днища коробчатого типа 11.
Силовые входы 41 (фиг. 3) преобразователя 25 через отверстия в нижней крышке 12 (фиг.2) плоского днища коробчатого типа 11 соединены с верхними концами токоведущих стержней 14.
Вход управления 42 преобразователя 25 соединен с выходом 43 микроконтроллера 44, расположенного во внутренней полости плоского днища коробчатого типа 11 (фиг. 2). К первому информационному входу 45 (фиг. 3) микроконтроллера 44 подключен индуктивный датчик 46, расположенный на ограничителе 47 (фиг. 2), жестко закрепленном на кромке боковой поверхности первого полуцилиндра 15. Ответно индуктивному датчику 46 на кромке боковой поверхности второго полуцилиндра 16 жестко закреплен постоянный магнит 48 и симметрично ему на другой кромке боковой поверхности второго полуцилиндра 16 жестко закреплен такой же постоянный магнит 49. Ко второму информационному входу 50 (фиг. 3) микроконтроллера 44 подключен датчик присутствия 51, установленный на внешней поверхности верхней крышки 17 (фиг. 2) плоского днища коробчатого типа И. С третьим информационным входом 52 (фиг. 3) микроконтроллера 44 соединен приемник радиосигналов 53, расположенный внутри плоского днища коробчатого типа 11 (фиг. 2).
Работа устройства происходит следующим образом.
Напряжение с контактной сети через токоведущие стержни 13 и 14 (фиг. 3) проходных изоляторов 3 и преобразователь 25, в котором оно преобразуется в постоянное и изменяется на требую величину, подается на кольцеобразный 39 и круговой 40 электроды.
Если участок контактной сети обесточен, напряжение на кольцеобразный 39 и круговой 40 электроды подается от резервного источника электропитания 32, предварительно заряженного с помощью зарядного устройства 33, подключенного к третьему силовому выходу 34 преобразователя 25, когда на данный участок контактной сети было подано напряжение.
Выбор цепей питания кольцеобразного 39 и кругового 40 электродов производится с помощью переключающего устройства 29, жестко закрепленного во внутренней полости днища коробчатого типа 11 (фиг.2).
По радиосигналу с пульта управления, который на чертежах не показан, беспилотный летательный аппарат (В Дании создали дрон, способный находиться в воздухе неограниченное время // Служба новостей ForPost [Электронный ресурс], - Режим доступа: https://sevastopol.su/news/v-danii-sozdali-dron-sposobnyy-nakhoditsya-v-vozdukhe-neogranichennoe-vremya (дата обращения: 13.04.2024 г.)) и оснащенный направляющими - контактными электродами, подлетает к стойке опоры контактной сети 2 (фиг. 1).
Упомянутый выше радиосигнал с пульта управления также приходит на приемник радиосигналов 53 (фиг. 3), а затем поступает на третий информационный вход 52 микроконтроллера 44. Микроконтроллер 44 генерирует сигнал, поступающий на вход управления 42 преобразователя 25. Преобразователь 25 выдает напряжение питания прямой полярности на реверсивный поворотный электрический двигатель 20. Вал 21 (фиг. 2) реверсивного поворотного электрического двигателя 20 вместе с обрезиненным колесом 22 начинает вращаться и второй полуцилиндр 16 с помощью подвижных кареток 19 осуществляет движение по круговой направляющей 18, в конце которого левая кромка боковой поверхности второго полуцилиндра 16 упирается в ограничитель 47, и под действием магнитного поля постоянного магнита 48 срабатывает индуктивный датчик 46, который подает сигнал на первый информационный вход 45 (фиг. 3) микроконтроллера 44, под действием которого прекращается питание реверсивного поворотного электрического двигателя 20. В результате этих действий корпус 9 бокса 1 (фиг. 2) находится в открытом состоянии.
Беспилотный летательный аппарат влетает вовнутрь корпуса 9 и осуществляет посадку на верхнюю крышку 17 днища коробчатого типа 11. В конце посадки беспилотного летательного аппарата срабатывает датчик присутствия 51 (фиг. 3), сигнал с которого поступает на второй информационный вход 50 микроконтроллера 44. Микроконтроллер 44 генерирует сигнал, поступающий на вход управления 42 преобразователя 25. В результате преобразователь 25 осуществляет подачу напряжения питания обратной полярности на реверсивный поворотный электрический двигатель 20. Вал 21 (фиг. 2) реверсивного поворотного электрического двигателя 20 вместе с обрезиненным колесом 22 начинает вращаться в обратном направлении и второй полуцилиндр 16 начинает обратное движение по круговой направляющей 18, в конце которого кромка боковой поверхности второго полуцилиндра 16 упирается в ограничитель 47, и магнитное поле постоянного магнита 49 приводит к срабатыванию индуктивного датчика 46, сигнал с которого приходит через первый информационный вход 45 (фиг. 3) в микроконтроллер 44. Микроконтроллер 44 генерирует сигнал, поступающий через вход управления 42 в преобразователь 25. Под действием этого сигнала прекращается подача напряжения питания на реверсивный поворотный электрический двигатель 20. Таким образом завершается процесс закрытия корпуса 9. Одновременно с этим осуществляется электрический контакт направляющих - контактных электродов беспилотного летательного аппарата с кольцеобразным 39 и круговым 40 электродами корпуса 9 (фиг. 2). Начинается заряд бортовой аккумуляторной батареи беспилотного летательного аппарата. Завершение заряда осуществляется с помощью блока контроля уровня заряда 37 (фиг. 3).
При необходимости возобновления мониторинга состояния контактной сети с пульта управления подается радиосигнал, под действием которого инициируется движение второго полуцилиндра 16 (фиг. 2) по круговой направляющей 18, взлет беспилотного летательного аппарата. Затем срабатывает датчик присутствия 51 (фиг. 3), сигнал с которого приводит в движение второй полуцилиндр 16 (фиг. 2) в обратном направлении, то есть начинается операция закрытия корпуса 9.
Как можно видеть, заявляемая стойка опоры контактной сети выполняет дополнительную функцию - обеспечение возможности приземления беспилотного летательного аппарата на вершине стойки опоры контактной сети с одновременным зарядом бортовой аккумуляторной батареи беспилотного летательного аппарата мультикоптерного типа кондукционным способом от контактной сети.
Следует отметить, что использование стойки опоры контактной сети с боксом 1 позволяет также предохранять беспилотный летательный аппарат мультикоптерного типа от воздействия неблагоприятных природных воздействий: дождя, снега и сильных порывов ветра, а также повысить оперативность работы беспилотного летательного аппарата мультикоптерного типа вследствие отсутствия необходимости его возвращения на базу при завершении выполнения полетного задания.
| название | год | авторы | номер документа |
|---|---|---|---|
| Стойка опоры контактной сети | 2023 |
|
RU2806649C1 |
| МАЛОРАЗМЕРНЫЙ БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ С ВОЗМОЖНОСТЬЮ ПЕРЕМЕЩЕНИЯ ПО ПОВЕРХНОСТИ ЗЕМЛИ | 2023 |
|
RU2807493C1 |
| УСТРОЙСТВО ДЛЯ ДИСТАНЦИОННОГО МОНИТОРИНГА ОБЪЕКТОВ ЭЛЕКТРОЭНЕРГЕТИКИ | 2021 |
|
RU2776589C1 |
| ШКАФ КОМПЛЕКТНОГО РАСПРЕДЕЛИТЕЛЬНОГО УСТРОЙСТВА | 1992 |
|
RU2006118C1 |
| Система посадки беспилотного летательного аппарата вертикального взлета и посадки | 2024 |
|
RU2837679C1 |
| ТВЕРДОТЕЛЬНЫЙ ВОЛНОВОЙ ГИРОСКОП | 2013 |
|
RU2541711C1 |
| Беспилотный летательный аппарат | 2021 |
|
RU2760832C1 |
| БПЛА из унифицированных деталей и узлов и способ его изготовления | 2023 |
|
RU2812011C1 |
| Способ и устройство бесконтактного дистанционного контроля технического состояния высоковольтных линейных изоляторов воздушных линий электропередач | 2020 |
|
RU2753811C1 |
| ГЕРМЕТИЗИРОВАННЫЙ ВВОД | 2003 |
|
RU2256970C2 |
Изобретение относится к длинномерным элементам строительных конструкций и может быть использовано при изготовлении стоек опор контактной сети. Технический результат - расширение функционального диапазона стойки опоры контактной сети за счет возможности приземления беспилотного летательного аппарата на вершине стойки опоры. Стойка опоры контактной сети содержит арматурный каркас в форме усеченного конуса из бетона, армированного преднапряженной композитной арматурой из стержней и поперечной спиральной ненапряженной композитной арматурой, смонтированной поверх преднапряженной композитной арматуры. На верхушке стойки опоры контактной сети жестко закреплены своими нижними фланцами два проходных изолятора с токоведущими стержнями. К верхним фланцам проходных изоляторов жестко прикреплен своим корпусом бокс со сферическим верхним куполом. Корпус бокса имеет плоское днище коробчатого типа, нижняя крышка которого жестко прикреплена к верхним фланцам проходных изоляторов, в нижней крышке плоского днища коробчатого типа выполнены отверстия, через которые проходят токоведущие стержни проходных изоляторов. Боковая поверхность корпуса бокса состоит из двух полых полуцилиндров, причем радиус боковой поверхности первого полуцилиндра больше радиуса боковой поверхности второго полуцилиндра, нижняя кромка первого полуцилиндра жестко прикреплена к краю верхней крышки плоского днища коробчатого типа. Во внутренней полости плоского днища коробчатого типа жестко закреплен реверсивный поворотный электрический двигатель, вал которого проходит через отверстие в верхней крышке плоского днища коробчатого типа, на конце вала жестко закреплено обрезиненное колесо, находящееся в механическом контакте с боковой поверхностью второго цилиндра, вход реверсивного поворотного электрического двигателя соединен с первым силовым выходом преобразователя, жестко закрепленного во внутренней полости плоского днища коробчатого типа, второй силовой выход преобразователя соединен с первым входом переключающего устройства, а второй вход переключающего устройства соединен с выводами резервного источника питания. К выводам резервного источника питания подключено зарядное устройство, соединенное с третьим силовым выходом преобразователя, выход переключающего устройства соединен с входом блока контроля уровня заряда, выходы которого соединены с кольцеобразным электродом и круговым электродом, находящимся внутри кольцеобразного электрода. Вход управления преобразователя соединен с выходом микроконтроллера, расположенного во внутренней полости плоского днища коробчатого типа. 3 ил.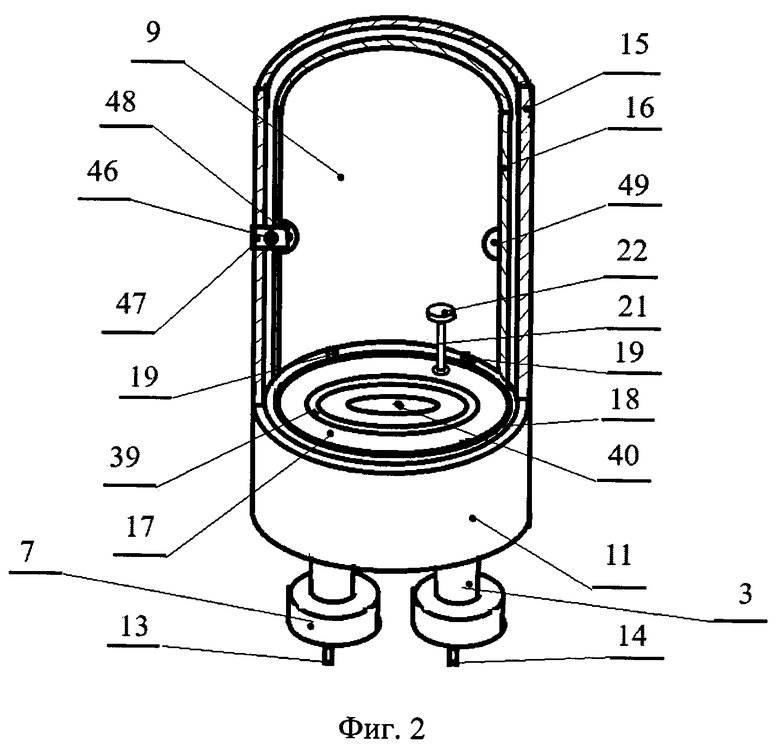
Стойка опоры контактной сети, содержащая арматурный каркас в форме усеченного конуса из бетона, армированного преднапряженной композитной арматурой из стержней и поперечной спиральной ненапряженной композитной арматурой, смонтированной поверх преднапряженной композитной арматуры, на верхушке стойки опоры контактной сети жестко закреплены своими нижними фланцами два проходных изолятора с токоведущими стержнями, отличающаяся тем, что к верхним фланцам проходных изоляторов жестко прикреплен своим корпусом бокс со сферическим верхним куполом, а корпус бокса имеет плоское днище коробчатого типа, нижняя крышка которого жестко прикреплена к верхним фланцам проходных изоляторов, в нижней крышке плоского днища коробчатого типа выполнены отверстия, через которые проходят токоведущие стержни проходных изоляторов, боковая поверхность корпуса бокса состоит из двух полых полуцилиндров, причем радиус боковой поверхности первого полуцилиндра больше радиуса боковой поверхности второго полуцилиндра, нижняя кромка первого полуцилиндра жестко прикреплена к краю верхней крышки плоского днища коробчатого типа, на внешней поверхности верхней крышки плоского днища коробчатого типа жестко закреплена круговая направляющая подвижного соединения второго цилиндра с радиусом меньшим, чем радиус боковой поверхности первого полуцилиндра, а подвижные каретки круговой направляющей жестко закреплены на нижней кромке второго полуцилиндра, во внутренней полости плоского днища коробчатого типа жестко закреплен реверсивный поворотный электрический двигатель, вал которого проходит через отверстие в верхней крышке плоского днища коробчатого типа, на конце вала жестко закреплено обрезиненное колесо, находящееся в механическом контакте с боковой поверхностью второго цилиндра, вход реверсивного поворотного электрического двигателя соединен с первым силовым выходом преобразователя, жестко закрепленного во внутренней полости плоского днища коробчатого типа, второй силовой выход преобразователя соединен с первым входом переключающего устройства, а второй вход переключающего устройства соединен с выводами резервного источника питания, к выводам резервного источника питания подключено зарядное устройство, соединенное с третьим силовым выходом преобразователя, выход переключающего устройства соединен с входом блока контроля уровня заряда, выходы которого соединены с кольцеобразным электродом и круговым электродом, находящимся внутри кольцеобразного электрода, кольцеобразный и круговой электроды жестко закреплены на наружной поверхности верхней крышки плоского днища коробчатого типа, силовые входы преобразователя через отверстия в нижней крышке плоского днища коробчатого типа соединены с верхними концами токоведущих стержней, вход управления преобразователя соединен с выходом микроконтроллера, расположенного во внутренней полости плоского днища коробчатого типа, к первому информационному входу микроконтроллера подключен индуктивный датчик, расположенный на ограничителе, жестко закрепленном на кромке боковой поверхности первого полуцилиндра, ответно индуктивному датчику на кромке боковой поверхности второго полуцилиндра жестко закреплен постоянный магнит и симметрично ему на другой кромке боковой поверхности второго полуцилиндра жестко закреплен такой же постоянный магнит, ко второму информационному входу микропроцессора подключен датчик присутствия, установленный на внешней поверхности верхней крышки плоского днища коробчатого типа, с третьим информационным входом микропроцессора соединен приемник радиосигналов, расположенный внутри плоского днища коробчатого типа.
| Стойка опоры контактной сети | 2023 |
|
RU2806649C1 |
| Способ изготовления из этернита радиаторного элемента, состоящего из отдельных отпрессованных половинок | 1932 |
|
SU43140A1 |
| Автономная зарядная станция для беспилотных летательных аппаратов | 2021 |
|
RU2775272C1 |
| СПОСОБ ЗАРЯДА АККУМУЛЯТОРНЫХ БАТАРЕЙ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2015 |
|
RU2593207C1 |
| US 20180229859 A1, 16.08.2018. | |||

