Изобретение относится к области гироскопических систем и может быть использовано в высокоточных навигационных системах летательных аппаратов.
Наиболее близким к данному изобретению является способ автономного определения уходов платформы трехосного гиростабилизатора [1], базирующийся на следующих положениях:
1. Определение уходов проводят в произвольном исходном положении гиростабилизированной платформы.
2. В алгоритмах не учитывают значения исходного азимута.
3. Для автономного определения уходов используют информацию с датчиков чувствительных элементов гиростабилизированной платформы.
К недостаткам данного способа следует отнести тот факт, что для определения уходов в азимутальном канале используют значения сигналов датчика моментов о токах коррекции в режиме «памяти», это вызывает задержки в реакции измерительной системы на изменения угловых отклонений платформы и снижает точность определения уходов. Кроме того, применение известного способа ограничивается его использованием только в режиме приведения платформы, не позволяя определять уходы гиростабилизированной платформы в процессе полета летательного аппарата.
Задачей предлагаемого изобретения является повышение точности определения уходов гиростабилизированной платформы, а также расширение функциональных возможностей платформы за счет определения уходов в процессе полета летательного аппарата.
Технический результат достигается тем, что определение уходов проводят в произвольном исходном положении платформы, в алгоритмах не учитывают значения исходного азимута, для автономного определения уходов используют информацию с датчиков чувствительных элементов платформы, по которой на каждом такте рассчитывают матрицу рассогласования путем произведения начальной матрицы ориентации платформы, сформированной в режиме приведения, и обратной матрицы ориентации, рассчитанной по сигналам датчиков угла прецессии в процессе полета.
Суть предлагаемого способа идентификации уходов гиростабилизированной платформы в полете заключается в том, что в процессе приведения гиростабилизированной платформы формируется начальная матрица ориентации платформы, элементами которой являются значения углов отклонения платформы относительно инерциального базиса. Полагается, что значения углов равны 0, тогда матрица ориентации (начальная) будет равна единичной матрице:

Данная матрица записывается в ячейку памяти оперативно-запоминающего устройства бортовой цифровой вычислительной машины и является априорными данными.
Точность навигационных систем в значительной мере зависит от стабильности углового положения гиростабилизированной платформы. Отклонение платформы от инерциального базиса оказывает существенное влияние на точность определения навигационных параметров. Причинами отклонения (уходов) платформ является дрейф гироскопов, возникающий в результате возмущающих моментов, действующих по осям прецессии.
Для идентификации уходов гиростабилизированной платформы в процессе полета летательного аппарата измеряются сигналы, поступающие с датчиков угла прецессии гироскопов. По измеренным сигналам формируется система дифференциальных уравнений движения гиростабилизированной платформы, составленная из уравнений прецессии гироскопов:
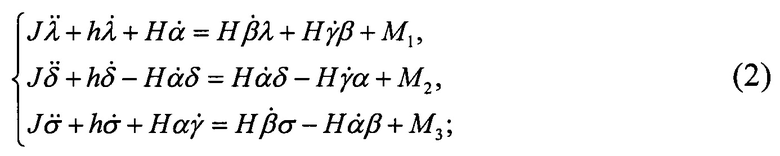
где α, β, γ - углы ориентации гиростабилизированной платформы относительно инерциального базиса;
λ, δ, σ - углы прецессии гироскопов;
J - момент инерции вокруг оси гироскопа;
h - удельный момент вязкого трения вокруг оси гироскопа;
Н - кинетический момент гироскопа;
M1, M2, M3 - возмущающие моменты, действующие по оси прецессии гироскопов и имеющие случайный характер.
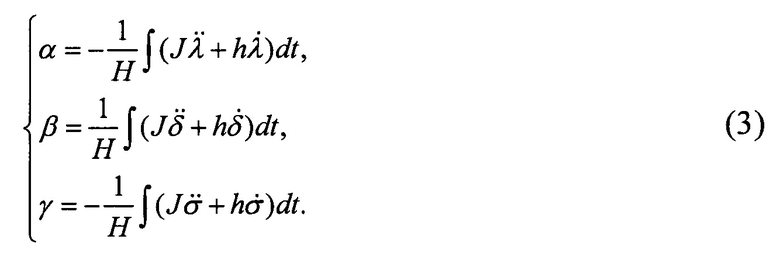
Сформированная система решается относительно углов ориентации платформы методом последовательных приближений. Решение системы дифференциальных уравнений 1-го приближения:
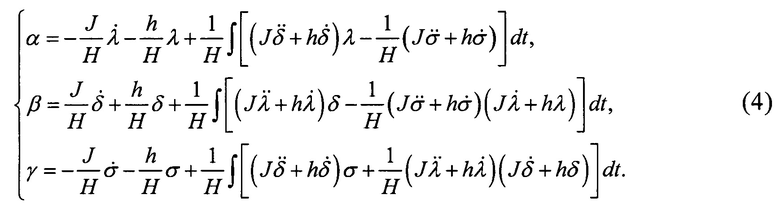
Решение системы дифференциальных уравнений 2-го приближения с учетом нелинейных перекрестных связей по гироскопическому моменту:
Из вычисленных углов ориентации платформы формируется матрица ориентации и рассчитывается ее обратная матрица:

где 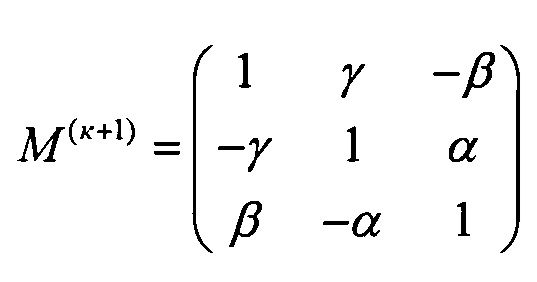 - матрица ориентации, сформированная из вычисленных углов ориентации платформы;
- матрица ориентации, сформированная из вычисленных углов ориентации платформы;
 - определитель матрицы ориентации;
- определитель матрицы ориентации;
 - союзная (присоединенная) матрица ориентации из алгебраических дополнений;
- союзная (присоединенная) матрица ориентации из алгебраических дополнений;
α, β, γ - значения углов ориентации платформы.
Далее рассчитывается матрица рассогласования путем произведения начальной матрицы ориентации на обратную матрицу ориентации, сформированную по значениям сигналов датчиков угла прецессии:

Используя определение обратной матрицы, проверяется условие:
- если результатом произведения является единичная матрица, то начальная матрица ориентации и обратная матрица ориентации, сформированная по сигналам датчиков угла прецессии гироскопов, равны, следовательно, гиростабилизированная платформа не изменила своего углового положения относительно инерциального базиса;
- если результатом произведения является матрица, не равная единичной матрице, то элементами данной матрицы являются значения углов отклонения платформы относительно инерциального базиса.
Расчет матрицы рассогласования производится на каждом такте съема информации с датчиков угла прецессии. Компенсация уходов гиростабилизированной платформы производится путем учета значений углов отклонения платформы в алгоритмах расчета вектора кажущейся скорости летательного аппарата, на котором установлена платформа, тем самым значительно повышая точность навигационной системы.
Таким образом, использование информации только с датчиков угла прецессии для расчета матрицы рассогласования на каждом такте позволяет повысить точность определения уходов платформы и расширить ее функциональные возможности за счет идентификации уходов в процессе полета летательного аппарата.
Предлагаемое изобретение не требует доработок существующей гиростабилизированной платформы, позволяет непосредственно использовать информацию о сигналах, поступающих с датчиков угла прецессии гироскопов.
Источники информации
1. RU 2711572 С1, 2018 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ КОНТРОЛЯ ВЫСТАВКИ ГИРОСТАБИЛИЗИРОВАННОЙ ПЛАТФОРМЫ ИНЕРЦИАЛЬНОЙ СИСТЕМЫ | 2013 |
|
RU2541152C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ И КОМПЕНСАЦИИ УХОДА ГИРОСТАБИЛИЗИРОВАННОЙ ПЛАТФОРМЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2285902C1 |
| АЗИМУТАЛЬНАЯ ОРИЕНТАЦИЯ ПЛАТФОРМЫ ТРЕХОСНОГО ГИРОСТАБИЛИЗАТОРА ПО УГЛУ ПРЕЦЕССИИ ГИРОБЛОКА | 2006 |
|
RU2324897C1 |
| Способ автономной ориентации объектов в околоземном пространстве | 2022 |
|
RU2787971C1 |
| СПОСОБ АВТОНОМНОЙ ИНЕРЦИАЛЬНОЙ ОРИЕНТАЦИИ ПОДВИЖНЫХ ОБЪЕКТОВ | 2022 |
|
RU2800846C1 |
| АВТОНОМНЫЙ КОМПЛЕКС ДЛЯ КОРРЕКЦИИ ИНЕРЦИАЛЬНЫХ СИСТЕМ ПЛАТФОРМЕННОЙ ОРИЕНТАЦИИ И НАВИГАЦИИ ПОДВИЖНЫХ ОБЪЕКТОВ | 2022 |
|
RU2826826C2 |
| СПОСОБ АВТОНОМНОЙ АЗИМУТАЛЬНОЙ ОРИЕНТАЦИИ ПЛАТФОРМЫ ТРЕХОСНОГО ГИРОСТАБИЛИЗАТОРА НА ПОДВИЖНОМ ОСНОВАНИИ | 2013 |
|
RU2541710C1 |
| Способ автономной азимутальной ориентации платформы трехосного гиростабилизатора по изменяющимся видимым уходам | 2016 |
|
RU2624617C1 |
| СПОСОБ ОЦЕНИВАНИЯ ОШИБОК ИНЕРЦИАЛЬНОЙ ИНФОРМАЦИИ И ЕЁ КОРРЕКЦИИ ПО ИЗМЕРЕНИЯМ ДОПЛЕРОВСКОГО ИЗМЕРИТЕЛЯ СКОРОСТИ | 2015 |
|
RU2614192C1 |
| Способ определения параметров ориентации объекта при помощи полуаналитической инерциальной навигационной системы с географической ориентацией осей четырехосной гироплатформы | 2022 |
|
RU2782334C1 |
Изобретение относится к области гироскопических систем и может быть использовано в высокоточных навигационных системах летательных аппаратов. Технический результат - повышение точности определения уходов гиростабилизированной платформы в процессе полета летательного аппарата. Результат достигается тем, что предложен способ идентификации уходов гиростабилизированной платформы в полете, заключающийся в том, что определение уходов проводят в произвольном исходном положении платформы, в алгоритмах не учитывают значения исходного азимута, для автономного определения уходов используют информацию с датчиков чувствительных элементов платформы, отличающийся тем, что на каждом такте рассчитывают матрицу рассогласования путем произведения начальной матрицы ориентации платформы, сформированной в режиме приведения, и обратной матрицы ориентации, рассчитанной по сигналам датчиков угла прецессии в процессе полета.
Способ идентификации уходов гиростабилизированной платформы в полете, заключающийся в том, что определение уходов проводят в произвольном исходном положении платформы, в алгоритмах не учитывают значения исходного азимута, для автономного определения уходов используют информацию с датчиков чувствительных элементов платформы, отличающийся тем, что на каждом такте рассчитывают матрицу рассогласования путем произведения начальной матрицы ориентации платформы, сформированной в режиме приведения, и обратной матрицы ориентации, рассчитанной по сигналам датчиков угла прецессии в процессе полета.
| Способ автономного определения уходов платформы трехосного гиростабилизатора | 2018 |
|
RU2711572C1 |
| Способ определения дрейфа гиростабилизированной платформы, вызываемого крутильными колебаниями основания прибора | 2022 |
|
RU2787651C1 |
| RU 2060463 C1, 20.05.1996 | |||
| CN 109540158 A, 29.03.2019 | |||
| FR 1381774 A, 14.12.1964. | |||

