ОБЛАСТЬ ТЕХНИКИ
Изобретение относится к области робототехники, в частности к способам управления роботами, а именно к способу перемещения мобильного четырехногого шагающего робота.
ПРЕДШЕСТВУЮЩИЙ УРОВЕНЬ ТЕХНИКИ
Из уровня техники известно роботизированное устройство идентификации препятствия на основе информации от датчика обнаружения роботом (см. WO2023042464A1, опубл. 23.03.2023). Реализовано высокоточное управление роботом за счет правильной идентификации препятствия без ошибочной идентификации, в том числе, части ноги или части руки робота как препятствия. В настоящем изобретении блок обработки фильтра главной области удаляет информацию об объекте, соответствующую составной части роботизированного устройства, из информации об объекте, включенной в информацию обнаружения от тактильного датчика, блок формирования изображения карты генерирует данные карты на основе информации об объекте, из которой информация об объекте, соответствующая составной части роботизированного устройства, была удалена, и блок управления роботом управляет роботизированным устройством на основе сгенерированных картографических данных. Блок обработки фильтра главной области обнаруживает переменную область фильтра, размер которой варьируется в соответствии со скоростью работы подвижной части роботизированного устройства, и выполняет процесс удаления информации об объекте внутри переменной области фильтра из информации обнаружения тактильного датчика.
Наиболее близким аналогом заявленного изобретения по мнению заявителя является робот и способ управления (см. CN112051797A, опубл. 08.12.2020). Изобретение предлагает способ и устройство, оборудование и среду управления движением ножного робота и относится к области техники роботов, причем способ включает этапы: получение данных о состоянии центроида, соответствующих начальной точке пространственного пути и концу пространственного пути. точка траектории движения; определение возможной точки опоры каждого конца ноги на траектории движения на основе начальной точки пространственного пути и конечной точки пространственного пути; на основе данных о состоянии центроида определение соотношения изменения между коэффициентом изменения положения центроида и контактной силой на конце ноги; при ограничении набора ограничительных условий отбор коэффициента изменения положения целевого центроида и целевой точки опоры, которые соответствуют соотношению изменения; при этом набор ограничительных условий содержит ограничительные условия фиксации пространства; определение целевого параметра управления движением в соответствии с коэффициентом изменения положения целевого центроида и целевой точкой опоры; и на основе параметра управления целевым движением управление ножным роботом для перемещения в соответствии с траекторией движения.
Предложенный в качестве наиболее близкого аналога робот и способ управления роботом наиболее близко подходит к решению проблемы заявленного изобретения, однако решает её не самым эффективным образом, поскольку отсутствие априорной информации о среде, в которой движется робот, приводит к необходимости использования или методов машинного обучения, или способов адаптации модельных подходов. С этим можно связать сложность решения задачи планирования траекторий и последовательностей шагов для шагающих роботов. Упрощенной версией этой общей задачи является проблема адаптации спланированной последовательности шагов с учетом информации об опорной поверхности, по которой роботу предстоит перемещаться, как представлено в заявленном изобретении.
КРАТКОЕ ИЗЛОЖЕНИЕ ИЗОБРЕТЕНИЯ
Данное изобретение направлено на решение технической проблемы, связанной созданием простого и эффективного способа адаптации шагов четырехногого шагающего робота при движении по сложной опорной поверхности.
Техническим результатом изобретения является упрощение задачи адаптации шагов четырехногого шагающего робота при движении по сложной опорной поверхности.
Технический результат достигается посредством способа управления движением четырехногого шагающего робота по пересеченной местности при движении по сложной опорной поверхности, включающего получение на каждой итерации движения в качестве входных данных микрокомпьютера шагающего робота следующих параметров: тип походки, необходимую скорость и направление движения, положение стоп робота относительно корпуса, входные данные передаются в МРС контроллер, который генерирует желаемые значения реакции опор, желаемые положения центра корпуса робота и его шарниров, данные значения затем передают в WBIC контроллер, который вычисляет команды крутящего момента, положения и скорости сустава, эта информация вместе с текущим состоянием робота, полученным от энкодеров, попадает в PD контроллер, который генерирует электроток, подаваемый на приводы.
Способ характеризуется тем, что разделение на МРС контроллер и WBIC контроллер обеспечивает планирование МРС контроллером реакции опоры на несколько шагов вперед и реализацию WBIC контроллером поиска текущего значения управления на основе найденных реакций опор, далее активируется модуль оценки состояния робота, который передаёт информацию о скорости и ускорении робота в кинематическую и динамическую модель устройства, на этом цикл обновления состояния завершается, и система ожидает новых входных данных.
В предпочтительном варианте выполнения тип походки определяется двумя параметрами: смещением фазы между двумя состояниями роботами контактом с поверхностью и переносом ноги, и интервалом времени между контактами ноги с поверхностью.
В предпочтительном варианте выполнения алгоритм адаптации точек опоры предполагаемых шагов робота введены ограничения на проекцию центра масс внутри контактного политопа, расстояние между точками опоры, максимизация площади контактного политопа, ограничения обратной кинематики, порог разницы высот, порог кривизны, порог максимального расстояния с учетом знака (SDF).
В предпочтительном варианте выполнения координат XY центра масс робота производят так, чтобы они находились в пределах контактного политопа – политопа, вершины которого соответствуют точкам контакта на опорной поверхности, спроецированным на горизонтальную плоскость перпендикулярно линии действия силы тяжести.
В предпочтительном варианте выполнения ограничением порога разницы высот является ограничение на максимальную разницу между текущей и следующей высотой точки опоры.
В предпочтительном варианте выполнения ограничением на порог кривизны является ограничения на те ячейки поверхности, где высота меняется слишком резко.
В предпочтительном варианте выполнения при ограничении на порог максимального расстояния с учетом знака (SDF) в слоях карты высот для каждой ячейки сетки присваивается значение SDF (Signed Distance Field Score) - расстояние до ближайшей ячейки с превышающим некоторый порог показателем кривизны, введя ограничения на величину SDF и полагая, что ячейка со значением кривизны выше порога расположена как можно ближе к краю колонны, значение SDF в центральной ячейке колонны будет равно половине длины колонны
КРАТКОЕ ОПИСАНИЕ РИСУНКОВ
Сущность изобретения поясняется чертежами, на которых:
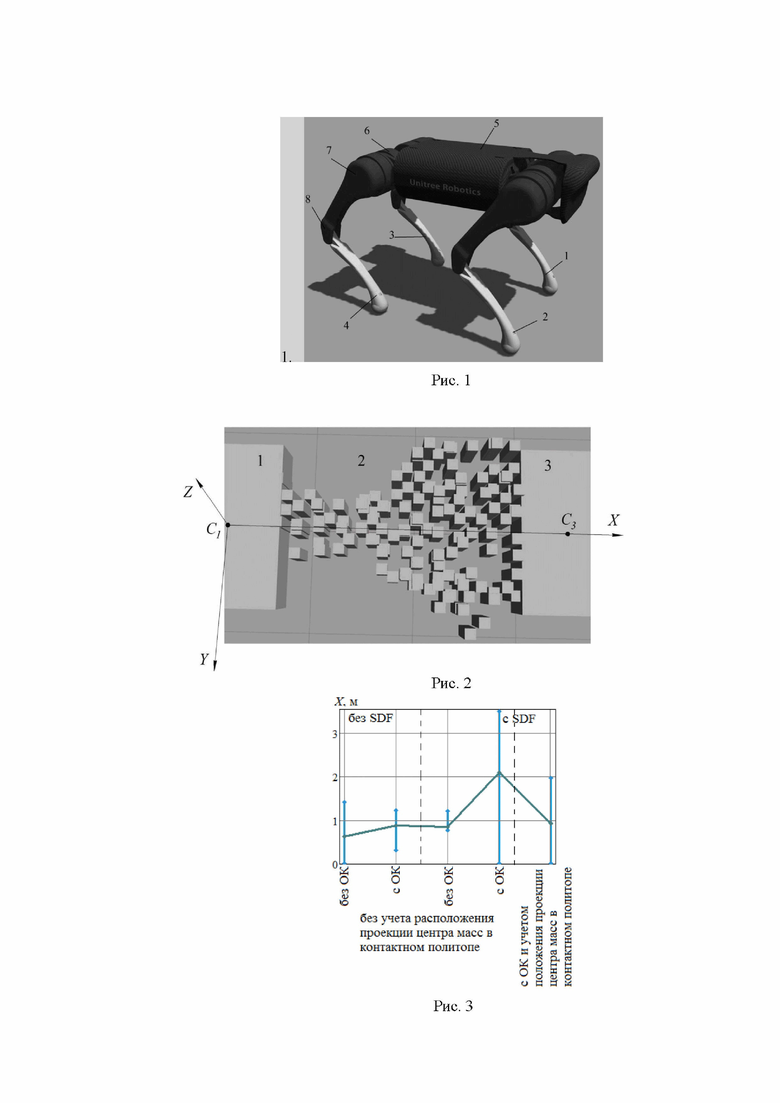
Рис. 1 - четырехногий робот;
Рис.2 - трасса движения робота (1 - кубоид начала трассы, 2 - хаотично расположенные колонны-кубоиды, 3 - кубоид завершения трассы, С1, С3 - точки начала и окончания трассы)
Рис.3 - схема влияния ограничений на ОК, SDF и положение проекции центра масс робота в контактном политопе на прохождение трассы
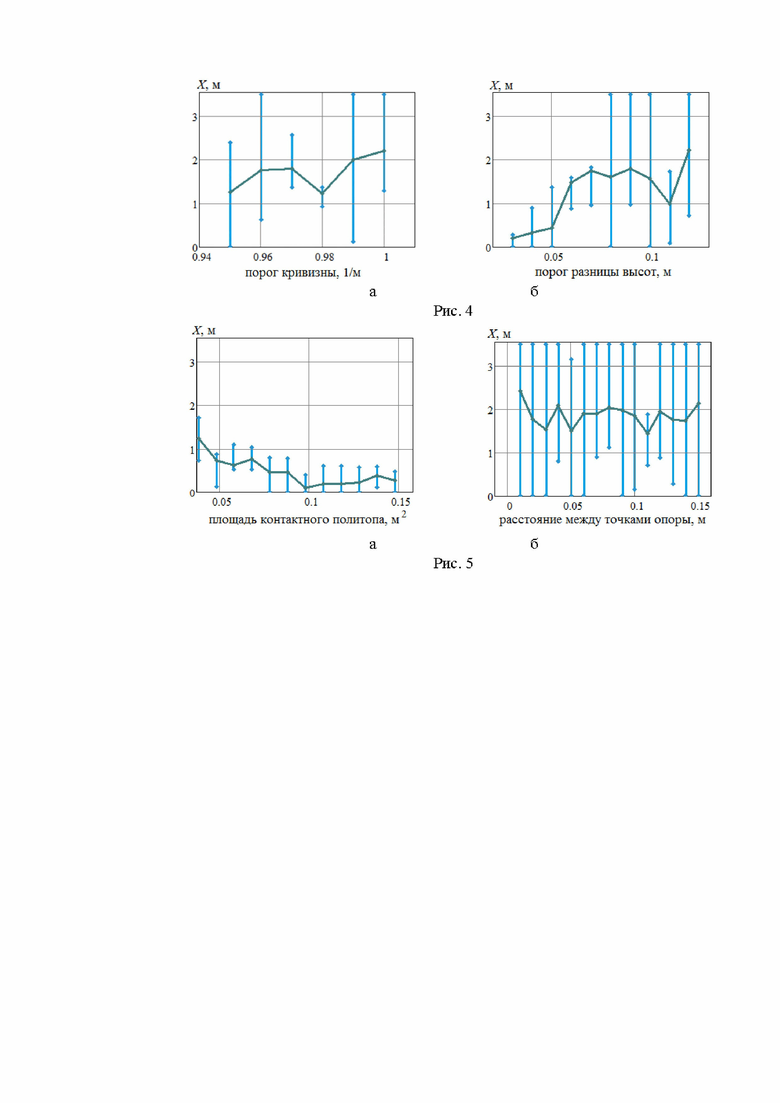
Рис. 4. - схема влияния ограничения порога кривизны (а) и порога разницы высот (б) на прохождение трассы
Позиции на фиг.1 обозначают следующее:
1-4 - ноги,
5 - корпус,
6 - привод поворота ноги во фронтальной плоскости,
7, 8 - приводы поворота ноги в сагиттальной плоскости.
ВАРИАНТ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
Способ адаптации шагов четырехногого шагающего робота основан на новых ограничениях в уже существующем алгоритме пакетной оценки. Такой подход является более легким и требует меньшего объема памяти по сравнению с решениями на основе оптимизации. Предложенный метод разработан для четырехногих шагающих роботов, выполненных по стандартной схеме (таких как UnitreeA1).
В качестве объекта исследования выбран четырехногий робот Unitree A1 c двенадцатью степенями свободы (рис. 1). Каждая нога робота имеет три вращательные степени свободы: одну во фронтальной плоскости и две в сагиттальной.
На каждой итерации движения в качестве входных данных микрокомпьютер Raspberry Pi (4) получает следующие параметры: тип походки, необходимую скорость и направление движения, положение стоп робота относительно корпуса. Тип походки определяется двумя параметрами: смещением фазы между двумя состояниями роботами (контакт с поверхностью / перенос ноги) и интервалом времени между контактами ноги с поверхностью. Входные данные передаются в МРС контроллер, который генерирует желаемые значения реакции опор, желаемые положения центра корпуса робота и его шарниров. Данные значения затем попадают в WBIC контроллер, который вычисляет команды крутящего момента, положения и скорости сустава. Эта информация вместе с текущим состоянием робота, полученным от энкодеров, попадает в PD контроллер, который генерирует электроток, подаваемый на приводы. Такая иерархическая структура, где разделение на МРС контроллер и WBIC контроллер позволяют первому планировать реакции опоры на несколько шагов вперед, что необходимо в связи со сменой находящихся в контакте ног, а второй реализует поиск текущего значения управления на основе найденных реакций опор. Затем активируется модуль оценки состояния робота, который передаёт информацию о скорости и ускорении робота в кинематическую и динамическую модель устройства. На этом цикл обновления состояния завершается, и система ожидает новых входных данных.
Движение робота происходит одновременно попарно: сначала начинает и заканчивает движение пара ног "левая передняя - правая задняя", далее начинает и заканчивает движение пара ног "левая задняя - правая передняя". Далее процесс повторяется, и так пока робот не дойдёт до конечной точки.
В качестве трассы движения робота предлагается трасса с хаотично расположенными кубоидами, показанная на рис. 2. Трасса состоит из трёх частей: 1 - часть с первым большим кубоидом, где инициализируется робот, 2 - часть с хаотично расположенными колоннами-кубоидами, 3 - часть со вторым большим кубоидом, где робот заканчивает своё движение. Ось X располагается параллельно линии между центрами больших кубоидов.
Колонны-кубоиды имеют размерности 0.1x0.1х0.4 (м) и расположены хаотично между двумя большими кубоидами с размерностями 1.5x1.5х0.4 (м). Случайное расположение центра колонны по оси Z ограничено областью [hmin, hmax], где hmin, hmax - наименьшая и наибольшая высота центра колонны. Колонны могут пересекаться и накладываться друг на друга, образуя фигуры с большим количеством граней.
Задача робота заключается в успешном прохождении трассы из точки С1 в точку С3 без потери устойчивости и опрокидывания. При этом системе управления необходимо выбирать оптимальные для установки ног колонны. Для этого вся карта разбивается на ячейки, и каждой ячейке присваивается балл - численная оценка безопасности того, стоит ли наступать в данную ячейку. Реализуется вышесказанное по следующему алгоритму.
Предлагаемый алгоритм оценки ячеек карты основан на геометрических преобразованиях и включает в себя расчет: 1) стандартного отклонения высоты  , 2) разницы высот от средней высоты
, 2) разницы высот от средней высоты  , 3) интеграл среднего наклона
, 3) интеграл среднего наклона  :
:

где  - весовые коэффициенты.
- весовые коэффициенты.
Эти параметры обеспечивают оценку безопасности переноса ноги в ячейку карты с целью избегания потери баланса робота, и как следствие, способствуют успешному прохождению трассы. Алгоритм работает следующим образом: ячейки-кандидаты на точку опоры, не удовлетворяющие предложенным ограничениям, не рассматриваются. Этим ячейкам присваивают нулевой балл и исключают из выбора лучшего результата. В качестве дополнительной оптимизации времени поиска при подсчете баллов оцениваются блоки 3x3 на карте высот и отбрасываются все кандидаты в блоке, если какой-либо из них не удовлетворяет ограничениям.
В способе предложен набор ограничений, которые могут позволить роботу успешно преодолевать трассу, а также могут повысить вероятность успешного прохождения пути.
1. Проекция центра масс внутри контактного политопа. Первоначальный алгоритм оценки точки опоры, столкнулся с проблемой потери равновесия на пересеченной местности в ситуациях, когда первая нога робота выбирает точку опоры, близкую к предыдущей, а противоположная по диагонали нога выбирает точку опоры, далекую от предыдущей. Предложено решение этой проблемы путем ограничения координат XY центра масс робота так, чтобы они находились в пределах контактного политопа – политопа, вершины которого соответствуют точкам контакта на опорной поверхности, спроецированным на горизонтальную плоскость перпендикулярно линии действия силы тяжести. Это ограничение гарантирует, что MPC сможет эффективно генерировать крутящие моменты на двигателях, которые позволят роботу осуществлять балансировку.
2. Расстояние между точками опоры. Предложено дополнительное ограничение минимального расстояния между точкой опоры для текущей ноги и другими опорными ногами. Это ограничение направлено на то, чтобы гарантировать отсутствие столкновения ног робота, т.к. это может привести к потере баланса и неустойчивому положению.
3. Максимизация площади контактного политопа. Максимизация площади контактного политопа робота с поверхностью обеспечивает лучшее распределение веса и повышенное сцепление, что позволяет роботу сохранять устойчивость при движении по неровным поверхностям:
где B - положение текущей точки опоры в абсолютных координатах, A и C - положения ближайших точек опоры к текущей в абсолютных координатах.
4. Ограничения обратной кинематики. На основе анализа обратной кинематики четырехногого робота [14] сформулирована косинусная зависимость между длиной ног и положением стопы робота:
где (x, y, z) - координаты текущей точки опоры, а L1, L2, L3 - длина каждой части ноги (бедра, голени, стопы).
Затем вычисляется второе ограничение:

где x0 - текущее положение точки опоры относительно оси X рамы бедра.
Третье и четвертое ограничения формулируются следующим образом:

где y0 и z0 - текущее положение точки опоры вокруг осей Y и Z рамы бедра.
Условия ограничения обратной кинематики можно записать следующим образом:

Если ячейка-кандидат на точку опоры не удовлетворяет указанным условиям, то считается, что она недостижима кинематически и сводит балл ячейки до нуля.
5. Порог разницы высот. Вводится ограничение на максимальную разницу между текущей и следующей высотой точки опоры. Отказ от слишком высоких точек опоры приводит к более эффективной походке, что в дальнейшем улучшает устойчивость робота.
6. Порог кривизны. Предполагается, что если робот наступает на участки со значительной разницей высот, то риск неустойчивости возрастает. Поэтому вводятся ограничения на те ячейки поверхности, где высота меняется слишком резко. Различие данного критерия с порогом высот состоит в том, что в качестве порога кривизны оценивается не абсолютный перепад высот от некоторой ячейки до рассматриваемой, а перепад высот между рассматриваемой ячейкой и ее соседями. Учет этих ограничений позволяет снизить риск столкновения робота с нестабильной местностью и улучшить его общую устойчивость во время перемещения.
7. Порог максимального расстояния с учетом знака (SDF). В слоях карты высот для каждой ячейки сетки присваивается значение SDF (Signed Distance Field Score) - расстояние до ближайшей ячейки с превышающим некоторый порог показателем кривизны. Введя ограничения на величину SDF и полагая, что ячейка со значением кривизны выше порога расположена как можно ближе к краю колонны, значение SDF в центральной ячейке колонны будет равно половине длины колонны. Таким образом, установка ограничения SDF > δ не позволяет роботу наступать на область, находящуюся на расстоянии от края колонны-кубоида, не превышающем δ.
Эксперименты проводились в симуляции gazebo, управление роботом происходит с использованием фреймворка ROS1 и ЯП С++. Целью проведения экспериментов является нахождение значений параметров, при которых робот сможет успешно проходить трассу.
При моделировании центры первого и второго большого кубоида имеют координаты (0, 0, 0.2) и (3.5, 0, 0.2) в глобальной системе координат (в метрах), колонны-кубоиды имеют размерности 0.1x0.1х0.4 (м). Случайное расположение центра колонны по оси Z ограничено областью [0.1 м, 0.3 м].
Каждый эксперимент начинается с расположения робота на трассе в точке С1 в положении стоя. Как только каждая нога образует точку опоры с поверхностью, робот переходит в положение лежа, задвигая конечности до уровня тела робота. Это необходимо для того, чтобы синхронизировать положения ног и выровнять корпус робота относительно осей XY. Затем включается лидар, робот встаёт на четыре ноги и начинает шагать вперёд ко второй части трассы.
На данном этапе движения работает алгоритм численной оценки ячеек карты, осуществляется выбор ячейки, обладающей наибольшим баллом. Однако ввиду того, что большой кубоид имеет ровную плоскую поверхность, все значения в области верхней грани кубоида будут одинаковыми, в таком случае алгоритм выбирает самую далёкую видимую ячейку (исключая клетки, которые не соответствуют введённым ограничениям).
Во второй части карты продолжается работа описанного алгоритма. Информация о выбранной ячейке передаётся в MPC в виде положений точек опоры относительно центра корпуса робота. Робот шагает по кубоидам, и если происходит застревание или падение, то в программу записывается последнее положение робота по оси X относительно глобальной системы координат в момент времени потери баланса. Потеря баланса расценивается как формирование угла между вертикальной осью корпуса робота и осью Z глобальной системы координат, превышающего 300, или же формирование вертикальной координаты центра корпуса робота ниже чем 0.4 м в глобальной системе координат.
Если робот доходит до точки С3 второго большого кубоида (т.е. все четыре ноги соприкасаются с поверхностью кубоида), то прохождение трассы считается успешным.
При каждом значении ограничения проведено 40 экспериментов, результаты которых представлены в виде диапазона минимального/максимального расстояний [Xmin, Xmax], пройденных центром масс робота до потери устойчивости - вертикальные отрезки на графиках. Также на каждом описанном отрезке показано среднее значение Xsr перемещения центра масс робота за 40 экспериментов, эти величины для разных значений ограничений соединены ломаной линией. Рассмотрим влияние каждого ограничения на успешность прохождения трассы роботом и на вероятность успешного прохождения трассы. Для оценки первого будем фиксировать максимальное расстояние Хmax, а для оценки второго - среднее расстояние Xsr.
На рис. 5 показано влияние трех видов ограничений: обратной кинематики (ОК), SDF и расположения проекции центра масс робота в контактном политопе. Причем каждое из этих ограничений имеет два значения: ограничение не введено, ограничение введено.
Первый (крайний левый) диапазон рис. 3 соответствует движению робота без учета всех предложенных ограничений, второй слева диапазон показан при учете ограничения на обратную кинематику робота. При сравнении двух диапазонов видно, что введение ограничения на ОК приводит к уменьшению диапазона возможных перемещений робота, а также к уменьшению максимально возможного расстояния вдоль оси Х, но при этом среднее значение перемещения за 40 экспериментов возрастает. Это означает, что введение ограничения на ОК не позволяет роботу успешно пройти трассу, но повышает вероятность этого, что свидетельствует о необходимости в дальнейших экспериментах учитывать данное ограничение.
Два последующих эксперимента соответствуют одновременному учету двух ограничений: ОК и SDF. При этом в связи с тем, что края кубоидов могут быть грубыми, предложено выдерживать расстояние SDF=2 см от края. Это значение выбрано эмпирически на основе анализа типичных поверхностей, по которым робот должен перемещаться. Сравнение четырех диапазонов позволяет сделать вывод о том, что введение ограничения только на значение SDF нецелесообразно, т.к. при этом сокращается диапазон перемещения робота при отсутствии возможности успешного прохождения трассы, а также снижается вероятность такого прохождения по отношению к результатам с введением ограничения на ОК. Наиболее эффективным является учет одновременно двух ограничений: на ОК и SDF (четвертый диапазон). При этом робот может успешно преодолеть трассу, т.к. Xmax=3.5 м, а также повышается вероятность успешного прохождения (значение Xsr наибольшее из всех рассмотренных экспериментов).
Дополнительный учет ограничения на расположение проекции центра масс робота в контактном политопе нецелесообразен, т.к. не обеспечивает успешное прохождение трассы и снижает вероятность такого движения робота (пятый диапазон). Поэтому все последующие эксперименты проведены при одновременном учете ограничений на ОК и SDF.
Результаты исследования порога кривизны, приведенные на рис. 4а свидетельствуют о неэффективности данного ограничения, т.к. успешное прохождение трассы и самая высокая вероятность этого наблюдаются при самом высоком значении порога кривизны (крайний правый диапазон).
По мере ужесточения этого ограничения (т.е. при движении по графику справа налево) снижается вероятность успешного передвижения по трассе (результаты при пороге кривизны 0.98 м будем считать обусловленными особенностями трассы и не будем принимать во внимание), а также уменьшается максимальное расстояние, пройденное роботом вдоль оси Х. Результаты эксперимента объясняются тем, что по мере увеличения порога кривизны возрастает число оптимальных для движения робота опорных ячеек. Поэтому в дальнейших экспериментах ограничение порога кривизны учитывать не будем.
На рис. 4б показаны диапазоны прохождения роботом трассы при учете порога разницы высот. Результаты этих экспериментов аналогичны результатам при учете порога кривизны: успешное прохождение трассы и самая высокая вероятность такого прохождения наблюдаются при наибольшем значении порога разницы высот (крайний правый график).
Уменьшение значения этого ограничения в диапазоне [0.08 м, 0.12 м] приводит к снижению вероятности успешного движения по трассе (результаты при значении 0.11 м будем считать обусловленными особенностями трассы и не будем принимать во внимание). Дальнейшее уменьшение порога разницы высот в диапазоне [0.03 м, 0.07 м] приводит еще и к невозможности успешного прохождения трассы (Xmax<3.5 м и уменьшается по мере уменьшения значения порога разницы высот). Принцип объяснения данных результатов также аналогичен предыдущему: расширение порога разницы высот увеличивает число оптимальных для опоры ячеек и способствует успешному передвижению робота. Поэтому считаем данное ограничение неэффективным и в дальнейшем учитывать его не будем.
Несмотря на повышение устойчивости робота при увеличении площади контактного политопа, максимизация площади политопа приводит к уменьшению наибольшего Xmax и среднего Xsr расстояний, проходимых центром масс робота вдоль оси Х по трассе (рис. 5а).
Результаты экспериментов объясняются тем, что по мере увеличения площади контактного политопа наблюдается сокращение числа оптимальных опорных ячеек ввиду усложнения кинематических ограничений на движение робота. Это означает, что введение данного ограничения неэффективно, т.к. при нем невозможно успешное прохождение трассы и невысока вероятность такого прохождения. В дальнейших экспериментах данное ограничение не учитывается.
На основании проведенных экспериментов (рис. 5б) установлено, что минимальное расстояние между опорами, лежащее в диапазоне [0.01 м, 0.15 м], обеспечивает успешное прохождение роботом трассы и практически не влияет на вероятность такого прохождения. Дальнейшее увеличение значения этого ограничения до 0.2 м приводит к невозможности успешного преодоления трассы и снижает его вероятность, а начиная со значения 0.2 м движение робота по трассе становится невозможным.
Такое поведение робота объясняется тем, что более 30% точек опоры между передней левой ногой и задней правой ногой имеют расстояние 0.2 м или менее. Это означает, что увеличение минимального расстояния между опорами приводит к усложнению выбора последующей возможной точки опоры, удовлетворяющей этому ограничению. При достижении значения ограничения 0.2 м перенос ноги робота будет приводить к нарушению ограничения, поэтому робот остается в начальном положении и не перемещается по трассе.
| название | год | авторы | номер документа |
|---|---|---|---|
| ШАГАЮЩЕЕ УСТРОЙСТВО | 2016 |
|
RU2642020C2 |
| КОЛЁСНО-ШАГАЮЩИЙ РОБОТ ДЛЯ ТЕХНИЧЕСКОЙ ДИАГНОСТИКИ | 2024 |
|
RU2839028C1 |
| Мобильный шагающий робот | 2023 |
|
RU2834558C1 |
| РОБОТИЗИРОВАННОЕ УСТРОЙСТВО | 2022 |
|
RU2788754C1 |
| СПОСОБ ПРИВЕДЕНИЯ В ДВИЖЕНИЕ ЭКЗОСКЕЛЕТА | 2018 |
|
RU2775525C2 |
| СПОСОБ ОЦЕНКИ РЕАКЦИЙ ОПОРЫ И СПОСОБ ОЦЕНКИ МОМЕНТОВ СУСТАВОВ ДВУНОГОГО ШАГАЮЩЕГО ТЕЛА | 2002 |
|
RU2272705C2 |
| ТРЕНАЖЕР ДЛЯ ГОРНОЛЫЖНИКОВ И СПОСОБ ТРЕНИРОВКИ НА НЕМ | 2020 |
|
RU2728086C1 |
| Способ передвижения по пересеченной местности и устройство для его реализации | 2017 |
|
RU2675742C1 |
| СПОСОБ ОЦЕНКИ РЕАКЦИЙ ОПОРЫ И СПОСОБ ОЦЕНКИ МОМЕНТОВ СУСТАВОВ ДВУНОГОГО ШАГАЮЩЕГО ТЕЛА | 2002 |
|
RU2296668C2 |
| Способ траекторного управления движением мобильного сервисного робота | 2024 |
|
RU2825211C1 |
Изобретение относится к области робототехники, в частности к способам управления роботами, а именно к способу управления движением четырехногого шагающего робота по пересеченной местности. На каждой итерации движения получают в качестве входных данных микрокомпьютера шагающего робота следующие параметры: тип походки, необходимую скорость и направление движения, положение стоп робота относительно корпуса. Входные данные передают в МРС контроллер, который генерирует желаемые значения реакции опор, желаемые положения центра корпуса робота и его шарниров. Данные значения передают в WBIC контроллер, который вычисляет команды крутящего момента, положения и скорости сустава. Эта информация вместе с текущим состоянием робота, полученным от энкодеров, попадает в PD контроллер, который генерирует электроток, подаваемый на приводы. При этом осуществляют разделение входных данных при передаче в указанные контроллеры на МРС контроллер и WBIC контроллер, которое обеспечивает планирование МРС контроллером реакции опоры на несколько шагов вперед и реализацию WBIC контроллером поиска текущего значения управления на основе найденных реакций опор. Активируют модуль, который передаёт информацию о скорости и ускорении робота в кинематическую и динамическую модель устройства, на этом цикл завершают, и микрокомпьютер ожидает новых входных данных. 5 з.п. ф-лы, 5 ил.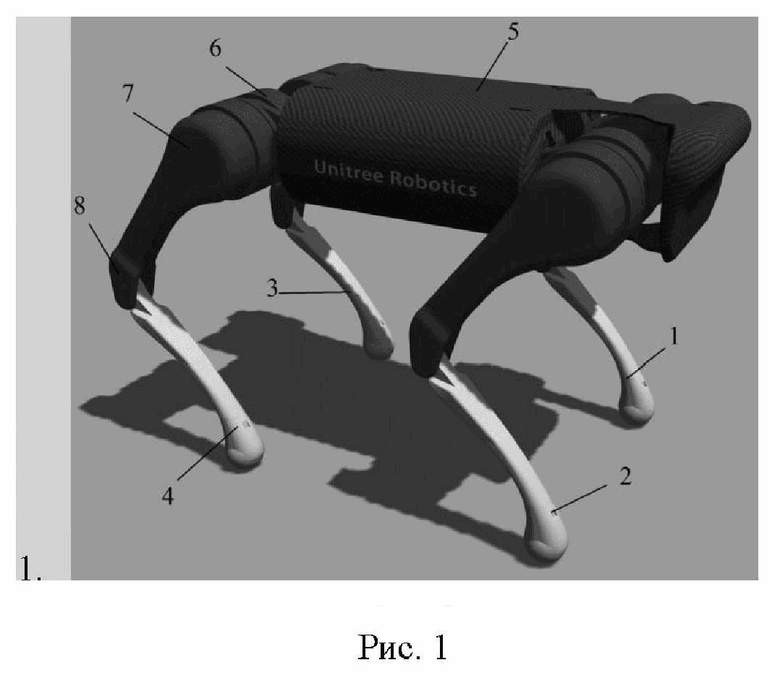
1. Способ управления движением четырехногого шагающего робота по пересеченной местности, включающий получение на каждой итерации движения в качестве входных данных микрокомпьютера шагающего робота следующих параметров: тип походки, необходимую скорость и направление движения, положение стоп робота относительно корпуса, входные данные передают в МРС контроллер, который генерирует желаемые значения реакции опор, желаемые положения центра корпуса робота и его шарниров, данные значения затем передают в WBIC контроллер, который вычисляет команды крутящего момента, положения и скорости сустава, эта информация вместе с текущим состоянием робота, полученным от энкодеров, попадает в PD контроллер, который генерирует электроток, подаваемый на приводы, отличающийся тем, что осуществляют разделение входных данных при передаче в указанные контроллеры на МРС контроллер и WBIC контроллер, которое обеспечивает планирование МРС контроллером реакции опоры на несколько шагов вперед и реализацию WBIC контроллером поиска текущего значения управления на основе найденных реакций опор, далее активируют модуль, который передаёт информацию о скорости и ускорении робота в кинематическую и динамическую модель устройства, на этом цикл завершают, и микрокомпьютер ожидает новых входных данных.
2. Способ по п.1, отличающийся тем, что тип походки определяется двумя параметрами: смещением фазы между двумя состояниями роботами контактом с поверхностью и переносом ноги, и интервалом времени между контактами ноги с поверхностью.
3. Способ по п.1, отличающийся тем, что в алгоритм адаптации точек опоры предполагаемых шагов робота введены ограничения на проекцию центра масс внутри контактного политопа – политопа, вершины которого соответствуют точкам контакта на опорной поверхности, спроецированным на горизонтальную плоскость перпендикулярно линии действия силы тяжести, расстояние между точками опоры, максимизация площади контактного политопа, ограничения обратной кинематики, порог разницы высот, порог кривизны, порог максимального расстояния с учетом знака SDF.
4. Способ по п.3, отличающийся тем, что ограничения координат XY центра масс робота производят так, чтобы они находились в пределах контактного политопа.
5. Способ по п.3, отличающийся тем, что ограничением порога разницы высот является ограничение на максимальную разницу между текущей и следующей высотой точки опоры.
6. Способ по п.3, отличающийся тем, что при ограничении на порог максимального расстояния с учетом знака SDF в слоях карты высот для каждой ячейки сетки присваивается значение SDF (Signed Distance Field Score) ‒ расстояние до ближайшей ячейки с превышающим некоторый порог показателем кривизны, введя ограничения на величину SDF и полагая, что ячейка со значением кривизны выше порога расположена как можно ближе к краю колонны, значение SDF в центральной ячейке колонны будет равно половине длины колонны.
| CN 112051797 A, 08.12.2020 | |||
| WO 2023042464 A1, 23.03.2023 | |||
| US 20060041332 A1, 23.02.2006 | |||
| РОБОТИЗИРОВАННОЕ УСТРОЙСТВО | 2022 |
|
RU2788754C1 |
| АВТОНОМНАЯ РОБОТИЗИРОВАННАЯ ЖИЗНЕННАЯ ФОРМА | 2011 |
|
RU2559715C2 |
| Шамраев А.Д | |||
| Исследование алгоритмов управления движением четвероногими роботами | |||
| Альманах научных работ молодых ученых Университета ИТМО | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Хусаинов Р.Р | |||
| и др | |||
| Исследование влияния | |||

