Изобретение относится к гироскопии и может быть использовано в системах управления движущимися объектами, преимущественно беспилотными летательными аппаратами.
Прототипом является способ регулировки гироскопа, включающий синхронный двигатель, маховик, соединенный с валом двигателя взаимно перпендикулярными упругими перемычками, датчик положения ротора и электронный блок управления вращением привода [Пат. РФ 2344375, МПК G01C 25/00, 2009].
Недостатками прототипа являются:
- сложность конструкции привода, реализующий способ, обусловленная большим числом деталей;
- гиродвигатель не имеет достаточно большого момента инерции при данной массе, так как не все вращающиеся на оси детали имеют максимально возможный радиус.
Задачей изобретения является упрощение конструкции привода гироскопа и увеличение гироскопического момента при заданной массе вращающихся на оси деталей.
Задача решается тем, что в приводе гироскопа, содержащем маховик, соединенный посредством спиц с осью вращения, на которой установлен магнит, имеющий возможность взаимодействия с катушкой, и электронный блок управления вращением привода, привод содержит, по крайней мере один маховик, выполненный, по крайней мере в виде одной части магнитов, в магнитном поле которых размещена, по крайней мере одна пара катушек, первая из которых подключена к входу блока управления, а вторая - к его выходу.
Катушки намотаны бифилярно. Другая пара катушек размещена симметрично относительно плоскости, проходящей через центр тяжести маховика перпендикулярно оси его вращения. Из другой части магнитов выполнен второй маховик, размещенный соосно с первым маховиком. Направления вращения первого и второго маховиков противоположны друг другу.
Указанные отличительные признаки позволяют достичь следующих преимуществ по сравнению с прототипом.
Наличие в приводе, по крайней мере одного маховика, выполненного, по крайней мере в виде одной части магнитов, в магнитном поле которых размещена, по крайней мере одна пара катушек, первая из которых подключена к входу блока управления, а вторая - к его выходу, позволяет при минимальной массе и небольшом числе вращающихся деталей получить большой момент инерции двигателя, а также упростить его конструкцию.
Выполнение бифилярной намотки катушек уменьшает габаритные размеры привода и упрощает управление им.
Размещение другой пары катушек симметрично относительно плоскости, проходящей через центр тяжести маховика перпендикулярно оси его вращения, позволяет приложить силы реакции в указанной плоскости, в результате чего рамка гироскопа не будет стремиться повернуться от их воздействия вокруг своей оси, что снижает, в конечном счете, воздействие на вращающийся маховик, т.е. гироскопический момент в данном случае полностью сохраняется.
Выполнение из другой части магнитов второго маховика, размещенного соосно с первым маховиком, уменьшает время выхода гироскопа на рабочий режим, поскольку каждая часть маховика разгоняется самостоятельно.
Выполнение вращения первого и второго маховиков в противоположных друг другу направлениях позволяет компенсировать момент от сил реакции в плоскости, проходящей через ось рамки перпендикулярно оси вращения, стремящийся повернуть рамку гироскопа. Это уменьшает силу трения в паре «ось рамки - подшипник», а также нейтрализует воздействие от рамки гироскопа на последующее кольцо, в котором она устанавливается.
Изобретение поясняется чертежами.
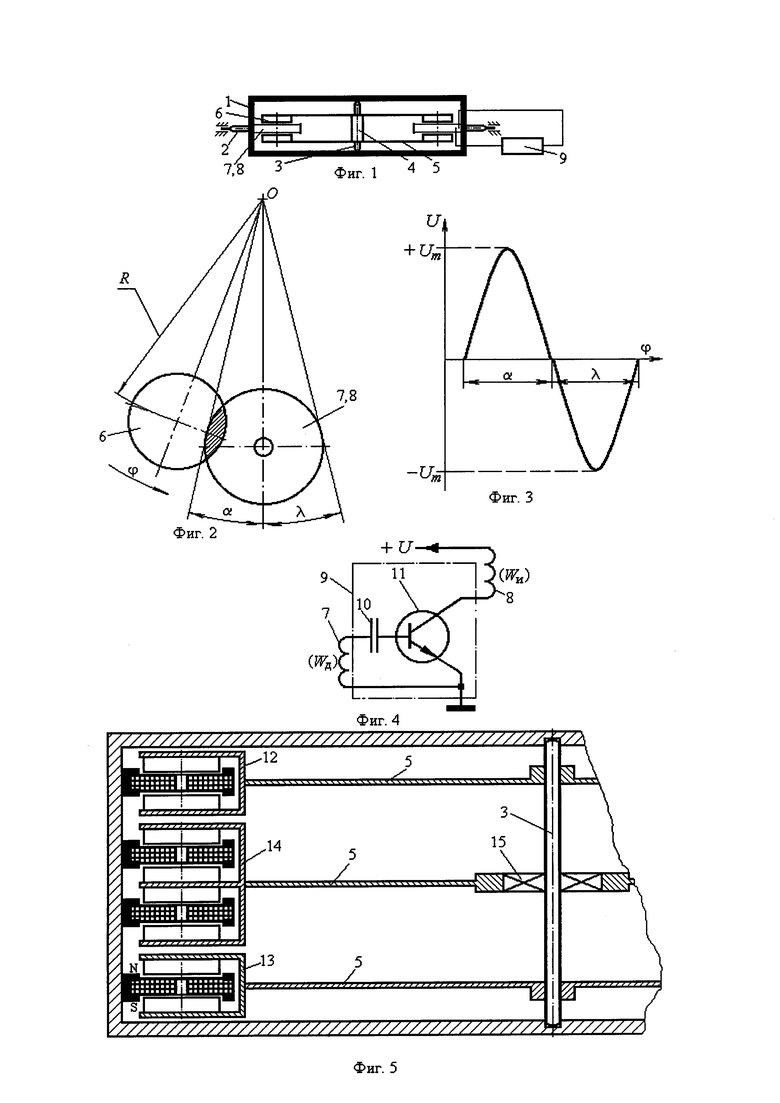
На фиг. 1 изображен привод гироскопа. На фиг. 2 изображена схема перекрывания магнитами витков катушки. На фиг. 3 изображен график изменения напряжения в катушке датчика при прохождении магнитов над катушкой. На фиг. 4 изображена схема возбуждения катушек импульса. На фиг. 5 изображен вариант выполнения маховика гироскопа.
Привод гироскопа содержит рамку 1 с осью 2, размещенной в плоскости, проходящей через цент тяжести маховика перпендикулярно оси 3 его вращения, на которой неподвижно закреплены втулка 4 со спицами 5, образующими вместе с магнитами 6 магнитную систему, в зазоре которой неподвижно установлены укрепленные на рамке и бифилярно намотанные катушка 7 датчика (Wд) и катушка 8 импульса (Wи), подключенные соответственно к входу и выходу электронного блока 9, который может иметь конденсатор 10, один конец которого подключен к входу блока, а другой - к базе транзистора 11, коллектор которого соединен с выходом блока, а эмиттер подключен к общей шине. Из одной части магнитов может быть выполнены магнитные системы 12, 13, которые посредством спиц жестко закреплены на оси 3, а из другой части магнитов - магнитная система 14, которая посредством спиц жестко скреплена с наружным кольцом подшипника 15, внутреннее кольцо которого скреплено с осью 3.
Привод гироскопа работает следующим образом.
Поскольку указанный привод не имеет начального пускового момента, то начальное вращение осуществляется с помощью внешней силы, например посредством придания пальцем руки вращательного движения магнитам. При вращении оси 3 на угол ϕ магнитная система, образованная магнитами 6 и магнитопроводом и движущаяся по радиусу R, перекрывает силовыми линиями витки катушки 7 (заштрихованная часть на фиг. 2), благодаря чему в ней индуцируется напряжение Um (фиг. 1, 2, 3). Предположим на угле а, равным половине угловой ширины катушки, формируется положительная полуволна напряжения, а на угле λ - отрицательная.
Положительная полуволна через конденсатор 10 поступает на базу транзистора 11 и открывает его, переводя в режим глубокого насыщения. В результате этого в катушке 8 импульса (Wи) и в других катушках (Wи1 - WиN), если их число на рамке равно N, формируется импульс тока, который создает в них магнитное поле, взаимодействующее с полем постоянных магнитов магнитной системы, при этом магниты подтягиваются к центру катушки, создавая момент вращения на маховике. После прохождения магнитами угла а на датчике формируется отрицательная полуволна напряжения, электронный блок 9 может быть выполнен таким образом, что через катушку 8 импульса также будет протекать ток, но направление тока в катушке будет изменено на противоположное. В результате этого магниты 6 будут отталкиваться от катушки. В результате при прохождении магнитами угла α+λ, на маховике будет создаваться вращающий момент. По мере раскручивания маховика длительность импульса (на входе и выходе блока 9) будет уменьшаться, поэтому для сохранения величины энергии, подаваемой на привод гироскопа, следует увеличить напряжение питания блока 9.
По длительности импульса, поступающего на вход блока 9 (или по импульсу с его выхода), можно судить о частоте вращения маховика, чем меньше эта длительность, тем выше частота вращения маховика. Поскольку габариты устройства небольшие, то его можно герметизировать и создать внутри вакуум, чтобы снизить силу сопротивления воздуха вращению маховика. Заметим, что в этом случае начальное вращение можно обеспечить магнитом, который перемещают снаружи герметичной оболочки.
Если смотреть на рамку гироскопа сверху и принять для определенности вращение маховика по часовой стрелке, то в момент формирования импульса реакции опор катушек будут воздействовать на ось 2 в горизонтальном направлении и стремиться повернуть ось и рамку против часовой стрелки. Нейтрализовать этот момент можно магнитными системами 12, 13, 14 (фиг. 5). Начальное вращение магнитным системам 12, 13 придают в одну сторону, а магнитной системе 14 - в другую. В результате этого, во-первых, сокращается время разгона и выхода гироскопа на рабочий режим, поскольку инерционные массы разгоняются частями. Во-вторых, момент от сил реакции катушек в магнитной системе 14 будет действовать в одну сторону, а от катушек магнитных систем 12, 13 - в другую. Достичь синхронного вращения указанных систем сложно, поэтому эти системы будут создавать последовательности импульсов, действующие на катушки в разное время. Однако за счет высокой частоты вращения сдвиг во времени одной последовательности импульсов относительно другой будет невелик, и за счет силы инерции рамки действие моментов от сил реакции катушек будет нейтрализовано. Говоря другими словами, если рамку гироскопа укрепить на вертикальной оси, соосной с осью 3, то рамка не должна вращаться вокруг указанной вертикальной оси.
Внедрение изобретения позволит создать простую конструкцию гироскопа с большим моментом инерции при минимальной массе вращающихся деталей.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ РАБОТЫ ЛИНЗОВОГО СВЕТОФОРА С ДВУХНИТЕВОЙ ЛАМПОЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2493605C1 |
| СПОСОБ ОТКРЫВАНИЯ И ЗАКРЫВАНИЯ ДВЕРИ | 2010 |
|
RU2422607C1 |
| ЭЛЕКТРИЧЕСКИЙ ПРИВОД ВЕЛОСИПЕДА | 2020 |
|
RU2747422C1 |
| СПОСОБ РАБОТЫ ПСИХРОМЕТРА | 2024 |
|
RU2825536C1 |
| МЕХАНИЗМ ЗЕРКАЛА ЗАДНЕГО ВИДА | 2019 |
|
RU2725099C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ПРОТЕЧЕК ВОДЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2549727C1 |
| ПРОЖЕКТОРНЫЙ СВЕТОФОР | 2012 |
|
RU2494903C1 |
| СПОСОБ УМЕНЬШЕНИЯ ЭНЕРГИИ, ЗАТРАЧИВАЕМОЙ ВОДИТЕЛЕМ В ПРОЦЕССЕ УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ | 2000 |
|
RU2223883C2 |
| КОММУТАЦИОННОЕ УСТРОЙСТВО | 2015 |
|
RU2579008C1 |
| ЧЕРВЯЧНАЯ ПРЕДОХРАНИТЕЛЬНАЯ МУФТА | 2012 |
|
RU2495288C1 |
Изобретение относится к гироскопии и может быть использовано в системах управления движущимися объектами, преимущественно беспилотными летательными аппаратами. Привод гироскопа содержит маховик, соединенный посредством спиц с осью вращения, на которой установлен магнит, имеющий возможность взаимодействия с катушкой, и электронный блок управления вращением привода. Маховик выполнен по крайней мере в виде одной части магнитов, в магнитном поле которых размещен, по крайней мере одна пара катушек, первая из которых подключена к входу блока управления, а вторая - к его выходу, а другая пара катушек размещена симметрично относительно плоскости, проходящей через центр тяжести маховика перпендикулярно оси его вращения. Из другой части магнитов выполнен второй маховик, размещенный соосно с первым маховиком, причем направления вращения первого и второго маховиков противоположны друг другу, а все катушки намотаны бифилярно. Технический результат - упрощение конструкции привода гироскопа и увеличение гироскопического момента при заданной массе вращающихся на оси деталей. 1 з.п. ф-лы, 5 ил.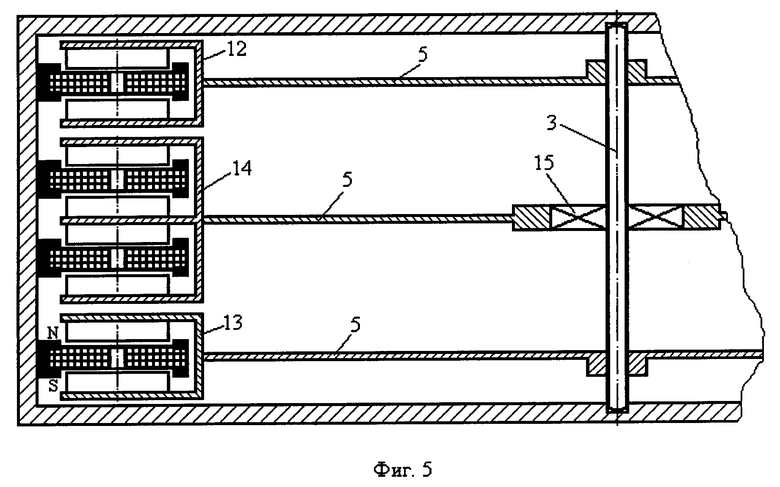
1. Привод гироскопа, содержащий маховик, соединенный посредством спиц с осью вращения, на которой установлен магнит, имеющий возможность взаимодействия с катушкой, и электронный блок управления вращением привода, отличающийся тем, что маховик выполнен по крайней мере в виде одной части магнитов, в магнитном поле которых размещена по крайней мере одна пара катушек, первая из которых подключена к входу блока управления, а вторая - к его выходу, а другая пара катушек размещена симметрично относительно плоскости, проходящей через центр тяжести маховика перпендикулярно оси его вращения, из другой части магнитов выполнен второй маховик, размещенный соосно с первым маховиком, причем направления вращения первого и второго маховиков противоположны друг другу, а все катушки намотаны бифилярно.
2. Привод по п. 1, отличающийся тем, что электронный блок управления выполнен в виде транзистора и конденсатора, один конец которого подключен к входу блока, а другой - к базе транзистора, коллектор которого соединен с выходом блока, а эмиттер подключен к общей шине.
| СПОСОБ РЕГУЛИРОВКИ ДИНАМИЧЕСКИ НАСТРАИВАЕМОГО ГИРОСКОПА | 2007 |
|
RU2344375C2 |
| ТРЕХСТЕПЕННЫЙ ГИРОСКОП | 1996 |
|
RU2119146C1 |
| US 3439556 A1, 22.04.1969 | |||
| Устройство для разгрузки платформ | 1931 |
|
SU27697A1 |
| ДИНАМИЧЕСКИ НАСТРАИВАЕМЫЙ ГИРОСКОП | 1999 |
|
RU2178142C2 |
| УСТРОЙСТВО И СПОСОБ ИЗМЕРЕНИЯ АБСОЛЮТНОЙ УГЛОВОЙ СКОРОСТИ | 2016 |
|
RU2621642C1 |
| ДИНАМИЧЕСКИ НАСТРАИВАЕМЫЙ ГИРОСКОП | 2018 |
|
RU2687169C1 |

