Изобретение относится к гироскопии и может быть использовано в системах инерциального управления движущимися объектами.
Известно построение электропривода динамически настраиваемого гироскопа (ДНГ) по принципу вентильного электропривода (патент RU, №2158902, G01C 19/02, 1999 г.). Гироскоп содержит ротор в виде радиально намагниченного постоянного магнита с шарикоподшипниковыми опорами подвеса, маховик, установленный на валу и соединенный с ведущим валом посредством утоньшенного вала, статор, содержащий обмотку двигателя. Способ формирования сигнала положения ротора заключается в обеспечении разбалансированности измерительного моста, и на выходе мостовой схемы появляется напряжение, пропорциональное входной угловой скорости.
В результате построения электропривода ДНГ по принципу вентильного электропривода поддерживается постоянство вращающего момента на валу двигателя и постоянство скорости вращения ротора, но угол между датчиком положения ротора и упругими перемычками ДНГ будет случайным, постоянным для каждого ДНГ.
Известен способ динамической настройки динамически настраиваемого гироскопа, на базе схемы электрической пружины», принятый за прототип. ДНГ содержит синхронный двигатель, маховик, соединенный с валом двигателя взаимно перпендикулярными упругими перемычками, и электронный блок управления вращением двигателя (патент RU, №2101678, G01C 19/02, 1998 г.). Регулируя значения моментов инерции (или жесткости подвеса или скорость вращения привода гироскопа), добиваются равенства нулю результирующей жесткости подвеса (Д.С.Пельпор, В.А.Матвеев, В.Д.Арсеньев «Динамически настраиваемые гироскопы». - Москва, «Машиностроение», 1988, стр.234).
Такой способ не учитывает большое изменение величины дрейфа от пуска к пуску (случайная составляющая дрейфа от пуска к пуску), обусловленная тем, что в момент достижения двигателем синхронизма угол между вектором вращающегося магнитного поля привода и упругими перемычками является случайным.
Задачей настоящего изобретения является повышение точности регулировки ДНГ путем снижения случайной составляющей дрейфа от пуска к пуску.
Это достигается тем, что в способе регулировки ДНГ, включающего синхронный двигатель, маховик, соединенный с валом двигателя взаимно перпендикулярными перемычками, датчик положения ротора и электронный блок управления вращением привода, после динамической настройки для каждого ДНГ индивидуально определяют зависимость величины дрейфа от угла между вектором вращающегося магнитного поля привода и упругими перемычками, выбирают величину угла, у которого первая производная этой зависимости по углу близка к нулю. Эту величину заносят в электронный блок, управляющий вращением синхронного двигателя, который при каждом включении обеспечивает именно эту величину угла.
Сущность изобретения поясняется чертежами.
На фиг.1 изображен предлагаемый ДНГ; на фиг.2 - график зависимости дрейфа от угла между вектором вращающего магнитного поля привода и упругими перемычками, где ϕ - угол между вектором вращающегося магнитного поля и упругими перемычками, ω - величина дрейфа.
Динамически настраиваемый гироскоп содержит маховик 1 (фиг.1), укрепленный с помощью взаимно перпендикулярных перемычек 2 и 3 на валу 4, который вращается с помощью привода, состоящего из статора 5, ротора 6, магнита 7 датчика положения ротора. На корпусе гироскопа закреплена катушка 8 датчика положения ротора, сигнал с которой поступает в электронный блок 9, управляющий вращением привода.
Способ регулировки ДНГ осуществляют следующим образом.
После проведения динамической настройки, для каждого ДНГ определяют зависимость величины дрейфа от угла между вектором вращающегося магнитного поля привода и упругими перемычками. Выбирают угол, в котором первая производная этой функции по углу близка к нулю.
Угол сдвига фаз между сигналом с датчика положения ротора и напряжением одной из фаз питания привода принимается за угол между вектором вращающегося магнитного поля привода и упругими перемычками ϕ. Постоянство угла при каждом включении обеспечивает электронный блок, управляющий вращением привода путем изменения параметров питания.
Выбор угла ϕ0 фиг.2 в точке, где первая производная по углу близка к нулю, обеспечивает минимальное изменение величины дрейфа от неточности поддержания электронным блоком величины угла между вектором вращающегося магнитного поля привода и упругими перемычками.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗМЕРЕНИЯ ПРОЕКЦИЙ ГОРИЗОНТАЛЬНОЙ СОСТАВЛЯЮЩЕЙ ВЕКТОРА УГЛОВОЙ СКОРОСТИ ВРАЩЕНИЯ ЗЕМЛИ ДЛЯ ОПРЕДЕЛЕНИЯ АЗИМУТАЛЬНОГО НАПРАВЛЕНИЯ (КОМПАСИРОВАНИЯ) | 2005 |
|
RU2300078C1 |
| СПОСОБ ДИНАМИЧЕСКОЙ НАСТРОЙКИ ДИНАМИЧЕСКИ НАСТРАИВАЕМОГО ГИРОСКОПА | 2005 |
|
RU2288450C1 |
| ДИНАМИЧЕСКИ НАСТРАИВАЕМЫЙ ГИРОСКОП | 2004 |
|
RU2248524C1 |
| ДИНАМИЧЕСКИ НАСТРАИВАЕМЫЙ ГИРОСКОП | 2017 |
|
RU2653155C1 |
| Способ регулирования изменения углового положения ротора динамически настраиваемого гироскопа, работающего в режиме датчика угловой скорости, вызванного изменением нулевых сигналов его датчиков углов | 2024 |
|
RU2829634C1 |
| ДИНАМИЧЕСКИ НАСТРАИВАЕМЫЙ ГИРОСКОП | 1999 |
|
RU2178142C2 |
| ДИНАМИЧЕСКИ НАСТРАИВАЕМЫЙ ГИРОСКОП | 1999 |
|
RU2157965C1 |
| Гироскоп с вращающейся камерой | 2020 |
|
RU2732789C1 |
| ДИНАМИЧЕСКИ НАСТРАИВАЕМЫЙ ГИРОСКОП | 2018 |
|
RU2687169C1 |
| Способ регулировки динамически настраиваемого гироскопа в составе инерциальной навигационной системы | 2020 |
|
RU2741501C1 |
Изобретение может быть использовано в системах инерциального управления движущимися объектами. Динамически настраиваемый гироскоп (ДНГ) содержит маховик (1), укрепленный с помощью взаимно перпендикулярных перемычек (2) и (3) на валу (4), который вращается с помощью привода, состоящего из статора (5), ротора (6), магнита (7) датчика положения ротора. На корпусе гироскопа закреплена катушка (8) датчика положения ротора, сигнал с которой поступает в электронный блок (9), управляющий вращением привода. После динамической настройки для каждого ДНГ индивидуально определяют зависимость величины дрейфа от угла между вектором вращающегося магнитного поля привода и упругими перемычками (2) и (3), выбирают угол, в котором первая производная этой функции по углу близка к нулю. Электронный блок управления (9) вращением привода, по сигналу с датчика положения ротора, обеспечивает постоянство выбранного угла при каждом включении ДНГ. Техническим результатом является повышение точности регулировки ДНГ путем снижения случайной составляющей дрейфа от пуска к пуску. 2 ил.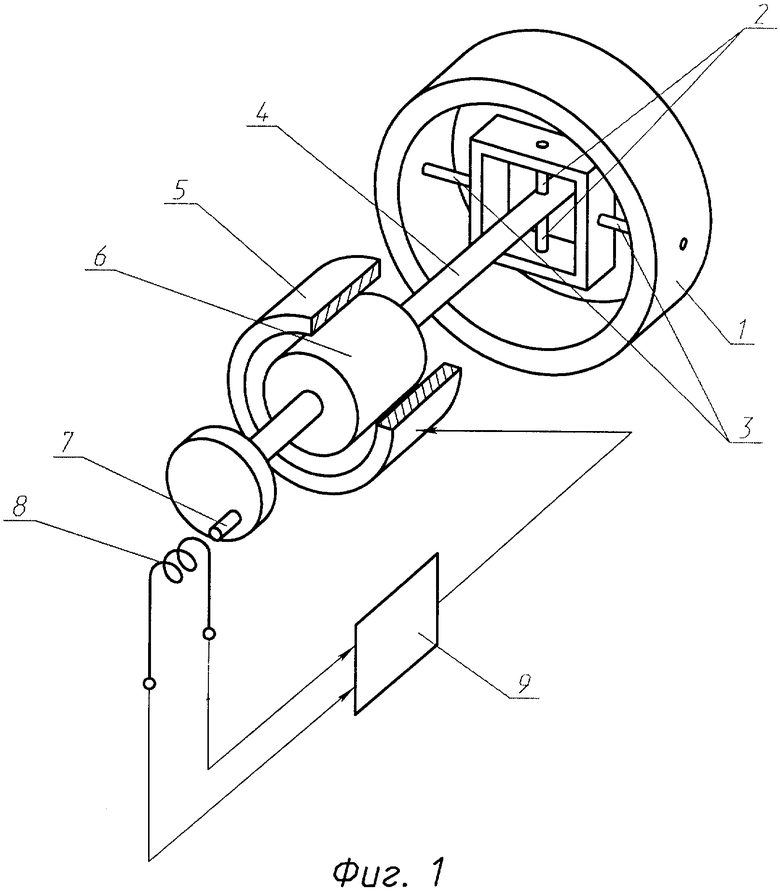
Способ регулировки динамически настраиваемого гироскопа (ДНГ), включающего синхронный двигатель, маховик, соединенный с валом двигателя взаимно перпендикулярными упругими перемычками, датчик положения ротора и электронный блок управления вращением привода, заключающийся в динамической настройке путем изменения моментов инерции, отличающийся тем, что после динамической настройки для каждого ДНГ индивидуально определяют зависимость величины дрейфа от угла между вектором вращающегося магнитного поля привода и упругими перемычками, выбирают угол, в котором первая производная этой функции по углу близка к нулю, и электронный блок управления вращением привода по сигналу с датчика положения ротора обеспечивает постоянство выбранного угла при каждом включении ДНГ.
| ПЕЛЬПОР Д.С | |||
| и др | |||
| Динамически настраиваемые гироскопы | |||
| - М.: Машиностроение, 1988, с.233-234 | |||
| СПОСОБ РЕГУЛИРОВКИ ДИНАМИЧЕСКИ НАСТРАИВАЕМОГО ГИРОСКОПА | 1989 |
|
SU1598615A1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ДИНАМИЧЕСКИ НАСТРАИВАЕМОГО ГИРОСКОПА | 1988 |
|
RU2065575C1 |
| ДИНАМИЧЕСКИ НАСТРАИВАЕМЫЙ ГИРОСКОП | 1980 |
|
RU2101678C1 |
| ДИНАМИЧЕСКИ НАСТРАИВАЕМЫЙ ГИРОСКОП | 1999 |
|
RU2158902C1 |
| СПОСОБ ДИНАМИЧЕСКОЙ НАСТРОЙКИ ДИНАМИЧЕСКИ НАСТРАИВАЕМОГО ГИРОСКОПА | 2005 |
|
RU2288450C1 |
| DE 3101828 A, 19.08.1982. | |||

