Изобретение относится к области систем автоматического управления, в частности к системам и приводам наведения артиллерийского и ракетного вооружения с ограниченными механическими упорами углами наведения, и может быть использовано в приводах и системах наведения пусковых установок ракетных комплексов и реактивных систем залпового огня, артиллерийских орудий, вооружения бронетехники, исполнительных устройств мобильных робототехнических комплексов.
Известны система стабилизации и наведения объекта (Патент на изобретение РФ №2107248 МПК F41G 5/24. Заявл. 27.06.1991. Опубл. 20.03.1998) и система стабилизации и наведения (Патент на полезную модель РФ №6610 МПК F41G 7/00. Заявл. 23.12.1996. Опубл. 16.05.1998). Недостатком данных систем является невысокая надежность, связанная с возможностью выхода из строя исполнительного привода или объекта управления из-за ударов объекта управления о механические упоры с высокой скоростью.
Наиболее близким устройством того же назначения к заявленному изобретению по совокупности признаков является система стабилизации и наведения (Патент на полезную модель РФ №7489 МПК F41G 5/24. Заявл. 07.08.1997. Опубл. 16.08.1998), принятая за прототип. Данная система стабилизации и наведения содержит последовательно соединенные пульт управления, второй управляемый усилитель, интегратор, первый управляемый усилитель, исполнительный привод и чувствительный элемент, выход которого соединен со вторым входом интегратора, а также концевой выключатель, выход которого соединен со вторыми входами первого и второго управляемых усилителей.
Недостатком прототипа является невысокая надежность, связанная с наличием вероятности недоведения объекта управления до механического упора при действии на его валу большого момента сопротивления движению, а также наличием вероятности выхода из строя исполнительного привода или объекта управления из-за удара объекта управления о механический упор с недопустимо высокой скоростью при действии на его валу большого попутного момента нагрузки.
Задачей предлагаемого изобретения является повышение надежности устройства за счет обеспечения доведения исполнительного привода до механического упора без превышения допустимой скорости контакта с механическим упором.
Сущность технического решения заключается в следующем. Наведение оружия объектов военной техники в пространстве осуществляется с использованием приводов наведения. При ограниченном диапазоне углов наведения подвод оружия к механическому упору для исключения повреждения конструкции оружия или конструкции упора должен осуществляться со скоростью, не превышающей некоторой небольшой величины. В связи с этим при подходе к механическому упору необходимо обеспечить снижение скорости наведения оружия до допустимого уровня по сигналу от концевого выключателя, угол срабатывания которого выбирается за несколько угловых минут или градусов до достижения механического упора. В прототипе снижение скорости исполнительного привода после срабатывания концевого выключателя обеспечивается за счет ограничения сигнала управления исполнительным приводом с помощью первого управляемого усилителя. Однако при наличии переменного момента нагрузки исполнительного привода скорость подхода к механическому упору в прототипе будет существенно отличаться в зависимости от направления и величины момента нагрузки. При больших значениях момента нагрузки, направленного в противоположную от направления движения к упору сторону, величина ограниченного сигнала управления исполнительным приводом может оказаться недостаточной для продолжения движения до упора. В то же время при большом моменте нагрузки, действующем попутно с направлением движения к упору, скорость подхода к механическому упору может оказаться недопустимо высокой.
Обеспечение стабильного доведения объекта управления до механического упора без превышения допустимой скорости контакта с механическим упором независимо от направления и величины момента нагрузки возможно за счет изменения структуры управления привода наведения с использованием датчика скорости исполнительного привода.
Указанный технический результат при осуществлении изобретения достигается тем, что в привод наведения, содержащий пульт управления, исполнительный привод, первый концевой выключатель введены блок вычисления абсолютной величины, первое пороговое устройство, первый инвертор, входы которых соединены с выходом пульта управления, второй инвертор, первый и второй источники постоянного сигнала, датчик скорости, вход которого механически соединен с выходом исполнительного привода, второе пороговое устройство и третий инвертор, входы которых соединены с выходом датчика скорости, второй концевой выключатель, третье пороговое устройство, вход которого соединен с выходом первого инвертора, первый блок коммутации, первый вход которого соединен с выходом второго инвертора, третий управляющий вход соединен с выходом первого порогового устройства, сумматор, первый вход которого соединен с выходом первого источника постоянного сигнала, четвертое пороговое устройство, вход которого соединен с выходом третьего инвертора, компаратор, первый вход которого соединен с выходом блока вычисления абсолютной величины, первый элемент И, первый вход которого соединен с выходом первого концевого выключателя, второй вход соединен с выходом первого порогового устройства, второй элемент И, первый вход которого соединен с выходом второго концевого выключателя, второй вход соединен с выходом третьего порогового устройства, первый элемент ИЛИ, первый вход которого соединен с выходом второго порогового устройства, второй вход соединен с выходом четвертого порогового устройства, второй блок коммутации, второй вход которого соединен с выходом сумматора, третий управляющий вход соединен с выходом первого элемента ИЛИ, второй элемент ИЛИ, первый вход которого соединен с выходом первого элемента И, второй вход соединен с выходом второго элемента И, третий элемент ИЛИ, первый вход которого соединен с выходом второго порогового устройства, второй вход соединен с выходом компаратора, четвертый элемент ИЛИ, первый вход которого соединен с выходом четвертого порогового устройства, второй вход соединен с выходом компаратора, третий блок коммутации, первый вход которого соединен с выходом второго источника постоянного сигнала, второй вход соединен с выходом второго блока коммутации, третий управляющий вход соединен с выходом второго элемента ИЛИ, а выход соединен с входом второго инвертора, вторым входом первого блока коммутации и вторым входом компаратора, четвертый блок коммутации, первый вход которого соединен с выходом пульта управления, второй вход соединен с выходом первого блока коммутации, выход соединен с входом исполнительного привода, элемент задержки на такт, вход которого соединен с выходом третьего блока коммутации, а выход соединен со вторым входом сумматора и с первым входом второго блока коммутации, третий элемент И, первый вход которого соединен с выходом третьего элемента ИЛИ, второй вход соединен с выходом первого концевого выключателя, третий вход соединен с выходом первого порогового устройства, четвертый элемент И, первый вход которого соединен с выходом четвертого элемента ИЛИ, второй вход соединен с выходом второго концевого выключателя, третий вход соединен с выходом третьего порогового устройства, пятый элемент ИЛИ, первый вход которого соединен с выходом третьего элемента И, второй вход соединен с выходом четвертого элемента И, а выход соединен с третьим управляющим входом четвертого блока коммутации.
В заявленном устройстве повышение надежности достигнуто за счет обеспечения доведения исполнительного привода до механического упора без превышения допустимой скорости контакта с механическим упором независимо от направления и величины момента нагрузки благодаря введению в структуру привода наведения датчика скорости, блока вычисления абсолютной величины, первого, второго, третьего и четвертого пороговых устройств, первого, второго и третьего инверторов, сумматора, первого и второго источников постоянного сигнала, второго концевого выключателя, первого, второго, третьего и четвертого блоков коммутации, первого, второго, третьего и четвертого элементов И, первого, второго, третьего, четвертого и пятого элементов ИЛИ, элемента задержки на такт, компаратора.
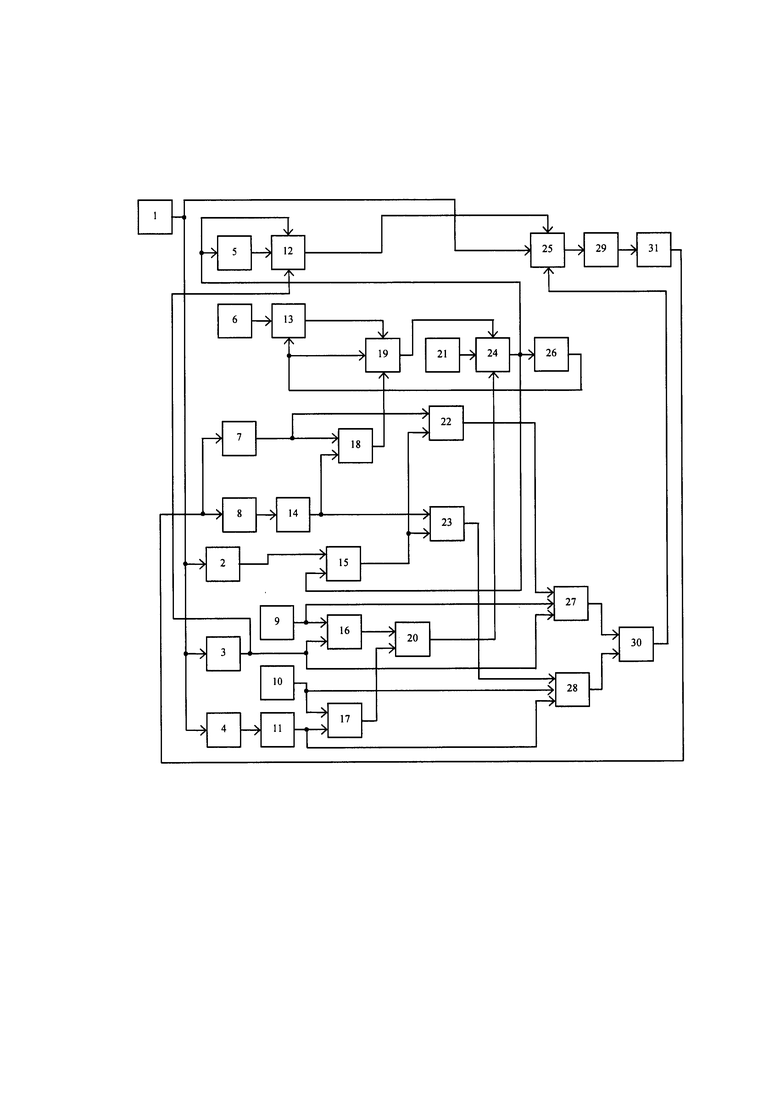
На чертеже приведена схема заявленного устройства.
На чертеже приняты следующие обозначения:
1 - пульт управления;
2 - блок вычисления абсолютной величины;
3 - первое пороговое устройство;
4 - первый инвертор;
5 - второй инвертор;
6 - первый источник постоянного сигнала;
7 - второе пороговое устройство;
8 - третий инвертор;
9 - первый концевой выключатель;
10 - второй концевой выключатель;
11 - третье пороговое устройство;
12 - первый блок коммутации;
13 - сумматор;
14 - четвертое пороговое устройство;
15 - компаратор;
16 - первый элемент И;
17 - второй элемент И;
18 - первый элемент ИЛИ;
19 - второй блок коммутации;
20 - второй элемент ИЛИ;
21 - второй источник постоянного сигнала;
22 - третий элемент ИЛИ;
23 - четвертый элемент ИЛИ;
24 - третий блок коммутации;
25 - четвертый блок коммутации;
26 - элемент задержки на такт;
27 - третий элемент И;
28 - четвертый элемент И;
29 - исполнительный привод;
30 - пятый элемент ИЛИ;
31 - датчик скорости.
Сведения, подтверждающие возможность осуществления изобретения с получением указанного выше технического результата, заключаются в следующем.
Привод наведения (чертеж) содержит пульт управления 1, блок вычисления абсолютной величины 2, первое пороговое устройство 3, первый инвертор 4, второй инвертор 5, первый источник постоянного сигнала 6, второе пороговое устройство 7, третий инвертор 8, первый концевой выключатель 9, второй концевой выключатель 10, третье пороговое устройство 11, первый блок коммутации 12, сумматор 13, четвертое пороговое устройство 14, компаратор 15, первый элемент И 16, второй элемент И 17, первый элемент ИЛИ 18, второй блок коммутации 19, второй элемент ИЛИ 20, второй источник постоянного сигнала 21, третий элемент ИЛИ 22, четвертый элемент ИЛИ 23, третий блок коммутации 24, четвертый блок коммутации 25, элемент задержки на такт 26, третий элемент И 27, четвертый элемент И 28, исполнительный привод 29, пятый элемент ИЛИ 30, датчик скорости 31.
Входы блока вычисления абсолютной величины 2, первого порогового устройства 3 и первого инвертора 4 соединены с выходом пульта управления 1. Вход второго инвертора 5 соединен с выходом третьего блока коммутации 24. Входы второго порогового устройства 7 и третьего инвертора 8 соединены с выходом датчика скорости 31. Вход третьего порогового устройства 11 соединен с выходом первого инвертора 4. Первый и второй входы первого блока коммутации 12 соединены соответственно с выходом второго инвертора 5 и с выходом третьего блока коммутации 24. Третий управляющий вход первого блока коммутации 12 соединен с выходом первого порогового устройства 3. Первый и второй входы сумматора 13 соединены соответственно с выходом первого источника постоянного сигнала бис выходом элемента задержки на такт 26. Вход четвертого порогового устройства 14 соединен с выходом третьего инвертора 8. Первый и второй входы компаратора 15 соединены соответственно с выходом блока вычисления абсолютной величины 2 и с выходом третьего блока коммутации 24. Первый и второй входы первого элемента И 16 соединены соответственно с выходом первого концевого выключателя 9 и с выходом первого порогового устройства 3. Первый и второй входы второго элемента И 17 соединены соответственно с выходом второго концевого выключателя 10 и с выходом третьего порогового устройства 11. Первый и второй входы первого элемента ИЛИ 18 соединены соответственно с выходом второго порогового устройства 7 и выходом четвертого порогового устройства 14. Первый и второй входы второго блока коммутации 19 соединены соответственно с выходом элемента задержки на такт 26 и с выходом сумматора 13. Третий управляющий вход второго блока коммутации 19 соединен с выходом первого элемента ИЛИ 18. Первый и второй входы второго элемента ИЛИ 20 соединены соответственно с выходом первого элемента И 16 и с выходом второго элемента И 17. Первый и второй входы третьего элемента ИЛИ 22 соединены соответственно с выходом второго порогового устройства 7 и с выходом компаратора 15. Первый и второй входы четвертого элемента ИЛИ 23 соединены соответственно с выходом четвертого порогового устройства 14 и с выходом компаратора 15. Первый и второй входы третьего блока коммутации 24 соединены соответственно с выходом второго источника постоянного сигнала 21 и с выходом второго блока коммутации 19. Третий управляющий вход третьего блока коммутации 24 соединен с выходом второго элемента ИЛИ 20. Первый и второй входы четвертого блока коммутации 25 соединены соответственно с выходом пульта управления 1 и с выходом первого блока коммутации 12. Третий управляющий вход четвертого блока коммутации 25 соединен с выходом пятого элемента ИЛИ 30. Вход элемента задержки на такт 26 соединен с выходом третьего блока коммутации 24. Первый, второй и третий входы третьего элемента И 27 соединены соответственно с выходом третьего элемента ИЛИ 22, с выходом первого концевого выключателя 9 и с выходом первого порогового устройства 3. Первый, второй и третий входы четвертого элемента И 28 соединены соответственно с выходом четвертого элемента ИЛИ 23, с выходом второго концевого выключателя 10 и с выходом третьего порогового устройства 11.Вход исполнительного привода 29 соединен с выходом четвертого порогового устройства 25. Первый и второй входы пятого элемента ИЛИ 30 соединены соответственно с выходом третьего элемента И 27 и с выходом четвертого элемента И 28. Вход датчика скорости 31 механически соединен с выходом исполнительного привода 29.
Рассмотрим работу привода наведения применительно к каналу вертикального наведения. Работа привода наведения применительно к каналу горизонтального наведения происходит аналогично с изменением «верхний» и «нижний» на «правый» и «левый».
Первый концевой выключатель 9 срабатывает при приближении исполнительного привода 29 к механическому упору, установленному на верхнем предельном угле наведения. При этом имевшийся на его выходе до срабатывания сигнал логического нуля изменяется на сигнал логической единицы.
Второй концевой выключатель 10 срабатывает при приближении исполнительного привода 29 к механическому упору, установленному на нижнем предельном угле наведения. При этом имевшийся на его выходе до срабатывания сигнал логического нуля изменяется на сигнал логической единицы.
Первое пороговое устройство 3 срабатывает при наличии на выходе пульта управления 1 сигнала положительной полярности, в соответствии с которым исполнительный привод 29 должен выполнять движение в сторону механического упора, установленного на верхнем предельном угле наведения. При этом на выходе первого порогового устройства 3 устанавливается сигнал логической единицы.
Третье пороговое устройство 11 срабатывает при наличии на выходе первого инвертора 4 сигнала положительной полярности. При этом на выходе третьего порогового устройства 11 устанавливается сигнал логической единицы. С учетом того, что вход первого инвертора 4 соединен с выходом пульта управления 1, сигнал логической единицы на выходе третьего порогового устройства 11 устанавливается при наличии на выходе пульта управления 1 сигнала отрицательной полярности, в соответствии с которым исполнительный привод 29 должен выполнять движение в сторону механического упора, установленного на нижнем предельном угле наведения.
Второе пороговое устройство 7 срабатывает при превышении сигнала на выходе датчика скорости 31 уровня, соответствующего допустимой скорости контакта исполнительного привода 29 с механическим упором. При превышении этого уровня на выходе второго порогового устройства 7 устанавливается сигнал логической единицы.
Четвертое пороговое устройство 14 срабатывает при превышении сигнала на выходе третьего инвертора 8 уровня, соответствующего допустимой скорости контакта исполнительного привода 29 с механическим упором. При превышении этого уровня на выходе четвертого порогового устройства 14 устанавливается сигнал логической единицы. С учетом того, что вход третьего инвертора 8 соединен с выходом датчика скорости 31, сигнал логической единицы на выходе четвертого порогового устройства 14 устанавливается при наличии на выходе датчика скорости 31 сигнала отрицательной полярности, абсолютная величина которого превышает уровень допустимой скорости контакта исполнительного привода 29 с механическим упором.
Первый, второй, третий и четвертый блоки коммутации 12, 19, 24, 25 пропускают на свой выход сигналы с первого входа, если на их третьем управляющем входе имеется сигнал логического нуля. При наличии на третьем управляющем входе сигнала логической единицы первый, второй, третий и четвертый блоки коммутации 12, 19, 24, 25 пропускают на свой выход сигналы со второго входа.
На выходе компаратора 15 устанавливается сигнал логической единицы, если сигнал на его первом входе, поступающий с выхода блока вычисления абсолютной величины 2, превышает сигнал на его втором входе, поступающий с выхода третьего блока коммутации 24. В противном случае на выходе компаратора 15 имеется сигнал логического нуля.
Привод наведения работает следующим образом. При большом удалении от механических упоров на выходах первого и второго концевых выключателей 9 и 10 имеются сигналы логического нуля. При этом на выходах третьего и четвертого элементов И 27 и 28 имеются сигналы логического нуля. Соответственно на выходе пятого элемента ИЛИ 30 также имеется сигнал логического нуля, поступающий на третий управляющий вход четвертого блока коммутации 25. При этом четвертый блок коммутации 25 пропускает на вход исполнительного привода 29 сигнал от пульта управления 1. Исполнительный привод 29 отрабатывает сигнал, поступающий от пульта управления 1.
При приближении в процессе наведения к механическому упору, установленному на верхнем предельном угле наведения, срабатывает первый концевой выключатель 9, при этом на его выходе устанавливается сигнал логической единицы.
При наличии на выходе пульта управления 1 сигнала положительной полярности, в соответствии с которым исполнительный привод 29 должен выполнять движение в сторону механического упора, установленного на верхнем предельном угле наведения, на выходе первого порогового устройства 3 также имеется сигнал логической единицы. При наличии сигналов логических единиц на выходах первого концевого выключателя 9 и первого порогового устройства 3 на выходе первого элемента И 16 устанавливается сигнал логической единицы, в соответствии с которым на выходе второго элемента ИЛИ 20 устанавливается сигнал логической единицы, поступающий на третий управляющий вход третьего блока коммутации 24. При этом третий блок коммутации 24 начинает пропускать на свой выход сигнал с выхода второго блока коммутации 19. Тем самым начинает производиться корректировка значения сигнала на выходе третьего блока коммутации 24, представляющего собой абсолютное значение сигнала, подаваемого на вход исполнительного привода 29 для обеспечения доведения исполнительного привода 29 до механического упора без превышения допустимой скорости контакта с механическим упором. До появления на третьем управляющем входе третьего блока коммутации 24 сигнала логической единицы на его выходе присутствует сигнал с выхода второго источника постоянного сигнала 21, уровень которого выбирается исходя из обеспечения доведения исполнительного привода 29 до механического упора при максимальном моменте сопротивления движению со стороны нагрузки с допустимой скоростью контакта с механическим упором. Корректировка сигнала на выходе третьего блока коммутации 24 осуществляется с помощью первого источника постоянного сигнала 6, сумматора 13, второго блока коммутации 19 и элемента задержки на такт 26 в зависимости от сигнала на выходе датчика скорости 31.
При превышении сигнала на выходе датчика скорости 31 уровня, соответствующего допустимой скорости контакта исполнительного привода 29 с механическим упором на выходе второго порогового устройства 7 устанавливается сигнал логической единицы. При этом на выходе первого элемента ИЛИ 18 также устанавливается сигнал логической единицы, который поступает на третий управляющий вход второго блока коммутации 19. При наличии на третьем управляющем входе второго блока коммутации 19 сигнала логической единицы он пропускает на свой выход сигнал с выхода сумматора 13. На первый и второй входы сумматора 13 поступают сигналы соответственно с выхода первого источника постоянного сигнала бис выхода элемента задержки на такт 26. Сигнал на выходе первого источника 6 имеет отрицательную полярность, а абсолютная его величина задает скорость уменьшения сигнала на выходе третьего блока коммутации 24 при превышении допустимой скорости исполнительного привода 29 в его движении в сторону механического упора. Тем самым при наличии на третьем управляющем входе второго блока коммутации 19 сигнала логической единицы сигнал на его выходе на каждом такте вычислений уменьшается на величину, соответствующую абсолютной величине сигнала на выходе первого источника постоянного сигнала 6.
При уменьшении сигнала на выходе датчика скорости 31 до уровня, соответствующего допустимой скорости контакта исполнительного привода 29 с механическим упором на выходе второго порогового устройства 7 устанавливается сигнал логического нуля. При этом на выходе первого элемента ИЛИ 18 также устанавливается сигнал логического нуля, который поступает на третий управляющий вход второго блока коммутации 19. При наличии на третьем управляющем входе второго блока коммутации 19 сигнала логического нуля он пропускает на свой выход сигнал с выхода элемента задержки на такт 26. При этом сигнал на выходе второго блока коммутации 19 на каждом такте вычислений остается без изменений.
На компараторе 15 производится сравнение абсолютной величины сигнала пульта управления 1 и сигнала на выходе третьего блока коммутации 24. Если абсолютная величина сигнала пульта управления 1 превышает сигнал на выходе третьего блока коммутации 24, на выходе компаратора 15 устанавливается сигнал логической единицы. При этом на выходе третьего элемента ИЛИ 22 устанавливается сигнал логической единицы. Сигнал логической единицы на выходе третьего элемента ИЛИ 22 устанавливается также при наличии на выходе второго порогового устройства 7 сигнала логической единицы. При наличии сигналов логических единиц на выходах третьего элемента ИЛИ 22, первого концевого выключателя 9 и первого порогового устройства 3, свидетельствующих о движении исполнительного привода 29 в сторону механического упора, установленного на верхнем предельном угле наведения, и о необходимости ограничения абсолютной величины сигнала на входе исполнительного привода 29, на выходе третьего элемента И 27 устанавливается сигнал логической единицы, в соответствии с которым сигнал логической единицы устанавливается на выходе пятого элемента ИЛИ 30 и третьем управляющем входе четвертого блока коммутации 25. При этом четвертый блок коммутации 25 пропускает на вход исполнительного привода 29 сигнал с выхода первого блока коммутации 12. При наличии на третьем управляющем входе первого блока коммутации 12 сигнала логической единицы, поступающего с выхода первого порогового устройства 3, первый блок коммутации 12 пропускает на свой выход и далее через четвертый блок коммутации 25 на вход исполнительного привода 29 сигнал с выхода третьего блока коммутации 24, обеспечивающий гарантированное доведение исполнительного привода 29 до механического упора, установленного на верхнем предельном угле наведения, без превышения допустимой скорости контакта с механическим упором.
При появлении на выходе пульта управления 1 сигнала отрицательной полярности для отведения исполнительного привода 29 от механического упора, установленного на верхнем предельном угле наведения, на выходе первого порогового устройства 3 устанавливается сигнал логического нуля, по которому на выходах первого элемента И 16, второго элемента ИЛИ 20, третьего элемента И 27 и пятого элемента ИЛИ 30 устанавливаются сигналы логического нуля. При этом четвертый блок коммутации 25 пропускает на вход исполнительного привода 29 сигнал от пульта управления 1, а на выходе третьего блока коммутации 24 устанавливается сигнал с выхода второго источника постоянного сигнала 21.
При приближении в процессе наведения к механическому упору, установленному на нижнем предельном угле наведения, срабатывает второй концевой выключатель 10, при этом на его выходе устанавливается сигнал логической единицы.
При наличии на выходе пульта управления 1 сигнала отрицательной полярности, в соответствии с которым исполнительный привод 29 должен выполнять движение в сторону механического упора, установленного на нижнем предельном угле наведения, на выходе третьего порогового устройства 11 также имеется сигнал логической единицы. При наличии сигналов логических единиц на выходах второго концевого выключателя 10 и третьего порогового устройства 11 на выходе второго элемента И 17 устанавливается сигнал логической единицы, в соответствии с которым на выходе второго элемента ИЛИ 20 устанавливается сигнал логической единицы, поступающий на третий управляющий вход третьего блока коммутации 24. При этом третий блок коммутации 24 начинает пропускать на свой выход сигнал с выхода второго блока коммутации 19. Тем самым начинает производиться корректировка значения сигнала на выходе третьего блока коммутации 24, представляющего собой абсолютное значение сигнала, подаваемого на вход исполнительного привода 29 для обеспечения доведения исполнительного привода 29 до механического упора без превышения допустимой скорости контакта с механическим упором.
При превышении абсолютной величины сигнала на выходе датчика скорости 31 уровня, соответствующего допустимой скорости контакта исполнительного привода 29 с механическим упором на выходе четвертого порогового устройства 14 устанавливается сигнал логической единицы. При этом на выходе первого элемента ИЛИ 18 также устанавливается сигнал логической единицы, который поступает на третий управляющий вход второго блока коммутации 19. При наличии на третьем управляющем входе второго блока коммутации 19 сигнала логической единицы он пропускает на свой выход сигнал с выхода сумматора 13. При этом сигнал на выходе второго блока коммутации 19 на каждом такте вычислений уменьшается на величину, соответствующую абсолютной величине сигнала на выходе первого источника постоянного сигнала 6.
При уменьшении абсолютной величины сигнала на выходе датчика скорости 31 до уровня, соответствующего допустимой скорости контакта исполнительного привода 29 с механическим упором на выходе четвертого порогового устройства 14 устанавливается сигнал логического нуля. При этом на выходе первого элемента ИЛИ 18 также устанавливается сигнал логического нуля, который поступает на третий управляющий вход второго блока коммутации 19. При наличии на третьем управляющем входе второго блока коммутации 19 сигнала логического нуля он пропускает на свой выход сигнал с выхода элемента задержки на такт 26. При этом сигнал на выходе второго блока коммутации 19 на каждом такте вычислений остается без изменений.
На компараторе 15 производится сравнение абсолютной величины сигнала пульта управления 1 и сигнала на выходе третьего блока коммутации 24. Если абсолютная величина сигнала пульта управления 1 превышает сигнал на выходе третьего блока коммутации 24, на выходе компаратора 15 устанавливается сигнал логической единицы. При этом на выходе четвертого элемента ИЛИ 23 устанавливается сигнал логической единицы. Сигнал логической единицы на выходе четвертого элемента ИЛИ 23 устанавливается также при наличии на выходе четвертого порогового устройства 14 сигнала логической единицы. При наличии сигналов логических единиц на выходах четвертого элемента ИЛИ 23, второго концевого выключателя 10 и третьего порогового устройства 11, свидетельствующих о движении исполнительного привода 29 в сторону механического упора, установленного на нижнем предельном угле наведения, и о необходимости ограничения абсолютной величины сигнала на входе исполнительного привода 29, на выходе четвертого элемента И 28 устанавливается сигнал логической единицы, в соответствии с которым сигнал логической единицы устанавливается на выходе пятого элемента ИЛИ 30 и третьем управляющем входе четвертого блока коммутации 25. При этом четвертый блок коммутации 25 пропускает на вход исполнительного привода 29 сигнал с выхода первого блока коммутации 12. При наличии на третьем управляющем входе первого блока коммутации 12 сигнала логического нуля, поступающего с выхода первого порогового устройства 3, первый блок коммутации 12 пропускает на свой выход и далее через четвертый блок коммутации 25 на вход исполнительного привода 29 сигнал отрицательной полярности с выхода второго инвертора 5, обеспечивающий гарантированное доведение исполнительного привода 29 до механического упора, установленного на нижнем предельном угле наведения, без превышения допустимой скорости контакта с механическим упором.
При появлении на выходе пульта управления 1 сигнала положительной полярности для отведения исполнительного привода 29 от механического упора, установленного на нижнем предельном угле наведения, на выходе третьего порогового устройства 11 устанавливается сигнал логического нуля, по которому на выходах второго элемента И 17, второго элемента ИЛИ 20, четвертого элемента И 28 и пятого элемента ИЛИ 30 устанавливаются сигналы логического нуля. При этом четвертый блок коммутации 25 пропускает на вход исполнительного привода 29 сигнал от пульта управления 1, а на выходе третьего блока коммутации 24 устанавливается сигнал с выхода второго источника постоянного сигнала 21.
Таким образом, введение в привод наведения датчика скорости, блока вычисления абсолютной величины, первого, второго, третьего и четвертого пороговых устройств, первого, второго и третьего инверторов, сумматора, первого и второго источников постоянного сигнала, второго концевого выключателя, первого, второго, третьего и четвертого блоков коммутации, первого, второго, третьего и четвертого элементов И, первого, второго, третьего, четвертого и пятого элементов ИЛИ, элемента задержки на такт, компаратора позволило повысить надежность за счет обеспечения доведения исполнительного привода до механического упора без превышения допустимой скорости контакта с механическим упором независимо от направления и величины момента нагрузки.
В предлагаемом изобретении при практической реализации могут быть использованы известные схемные реализации пульта управления, блока вычисления абсолютной величины, порогового устройства, сумматора, инвертора, компаратора, элемента И, элемента ИЛИ, в том числе устройства, реализованные на базе программируемых ЭВМ и контроллеров.
В качестве концевого выключателя могут быть использованы известные его схемные реализации, в том числе механические концевые выключатели, бесконтактные, магнитные концевые выключатели.
В качестве блока коммутации могут быть использованы реле, аналоговые ключи и коммутаторы, устройства, реализованные на базе программируемых ЭВМ и контроллеров, а также другие известные реализации, например известная схема (Патент на изобретение №2537256 МПК G05B 13/02, G05B 11/01. Заявл. 18.02.2014. Опубл. 27.12.2014, фиг. 2).
В качестве датчика скорости могут быть использованы тахогенераторы постоянного и переменного тока, импульсные датчики скорости, гиротахо-метры, резольверы с соответствующей схемой обработки их выходного сигнала.
В качестве исполнительного привода могут быть использованы электромеханические, электромашинные, гидравлические и электрогидравлические приводы.
В качестве элемента задержки на такт могут быть использованы его известные схемные реализации, например, регистр (Бойков В.И., Болтунов Г.И., Быстров С.В., Григорьев В.В., Литвинов Ю.В. Цифровая техника систем управления: Учебное пособие. - СПБ.: Университет ИТМО, 2018. - 139 с, с. 37-39), устройства задержки на такт, реализованные на базе программируемых ЭВМ и контроллеров.
В качестве источника постоянного сигнала могут быть использованы источники опорного напряжения, а также устройства, реализованные на базе программируемых ЭВМ и контроллеров.
| название | год | авторы | номер документа |
|---|---|---|---|
| Следящая система наведения | 2023 |
|
RU2815295C1 |
| Система наведения | 2023 |
|
RU2805507C1 |
| Привод наведения | 2024 |
|
RU2835457C1 |
| Система наведения | 2023 |
|
RU2819712C1 |
| Система управления наведением инерционного объекта | 2022 |
|
RU2795844C1 |
| СЛЕДЯЩАЯ СИСТЕМА НАВЕДЕНИЯ | 2006 |
|
RU2347172C2 |
| Устройство для защиты мостового инвертора от опрокидываний при совместной работе с выпрямителем | 1982 |
|
SU1069060A1 |
| СЛЕДЯЩАЯ СИСТЕМА | 1993 |
|
RU2087026C1 |
| Устройство автоматического управления положением разгрузочного конвейера горной машины | 1980 |
|
SU898059A1 |
| Система управления заслонкой плотины | 1988 |
|
SU1587119A1 |
Изобретение относится к области систем автоматического управления, в частности к системам и приводам наведения артиллерийского и ракетного вооружения с ограниченными механическими упорами углами наведения, и может быть использовано в приводах и системах наведения пусковых установок ракетных комплексов и реактивных систем залпового огня, артиллерийских орудий, вооружения бронетехники, исполнительных устройств мобильных робототехнических комплексов. Для достижения данного результата в привод наведения, содержащий пульт управления, исполнительный привод, первый концевой выключатель введены датчик скорости, блок вычисления абсолютной величины, первое, второе, третье и четвертое пороговые устройства, первый, второй и третий инверторы, сумматор, первый и второй источники постоянного сигнала, второй концевой выключатель, первый, второй, третий и четвертый блоки коммутации, первый, второй, третий и четвертый элементы И, первый, второй, третий, четвертый и пятый элементы ИЛИ, элемент задержки на такт, компаратор. Технический результат - повышение надежности устройства за счет обеспечения доведения исполнительного привода до механического упора без превышения допустимой скорости контакта с механическим упором. 1 ил.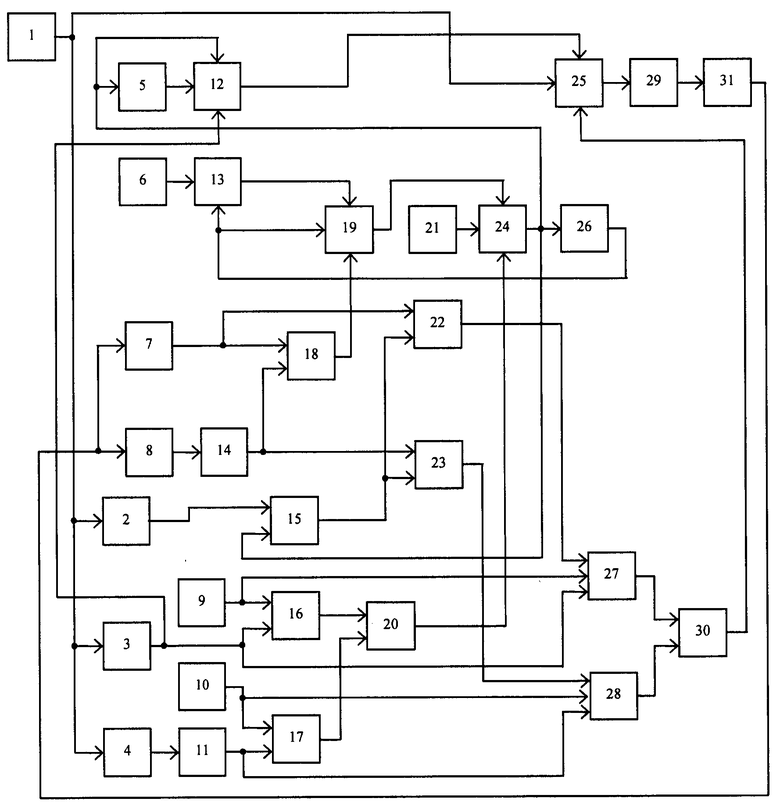
Привод наведения, содержащий пульт управления, исполнительный привод, первый концевой выключатель, отличающийся тем, что в него введены блок вычисления абсолютной величины, первое пороговое устройство, первый инвертор, входы которых соединены с выходом пульта управления, второй инвертор, первый и второй источники постоянного сигнала, датчик скорости, вход которого механически соединен с выходом исполнительного привода, второе пороговое устройство и третий инвертор, входы которых соединены с выходом датчика скорости, второй концевой выключатель, третье пороговое устройство, вход которого соединен с выходом первого инвертора, первый блок коммутации, первый вход которого соединен с выходом второго инвертора, третий управляющий вход соединен с выходом первого порогового устройства, сумматор, первый вход которого соединен с выходом первого источника постоянного сигнала, четвертое пороговое устройство, вход которого соединен с выходом третьего инвертора, компаратор, первый вход которого соединен с выходом блока вычисления абсолютной величины, первый элемент И, первый вход которого соединен с выходом первого концевого выключателя, второй вход соединен с выходом первого порогового устройства, второй элемент И, первый вход которого соединен с выходом второго концевого выключателя, второй вход соединен с выходом третьего порогового устройства, первый элемент ИЛИ, первый вход которого соединен с выходом второго порогового устройства, второй вход соединен с выходом четвертого порогового устройства, второй блок коммутации, второй вход которого соединен с выходом сумматора, третий управляющий вход соединен с выходом первого элемента ИЛИ, второй элемент ИЛИ, первый вход которого соединен с выходом первого элемента И, второй вход соединен с выходом второго элемента И, третий элемент ИЛИ, первый вход которого соединен с выходом второго порогового устройства, второй вход соединен с выходом компаратора, четвертый элемент ИЛИ, первый вход которого соединен с выходом четвертого порогового устройства, второй вход соединен с выходом компаратора, третий блок коммутации, первый вход которого соединен с выходом второго источника постоянного сигнала, второй вход соединен с выходом второго блока коммутации, третий управляющий вход соединен с выходом второго элемента ИЛИ, а выход соединен с входом второго инвертора, вторым входом первого блока коммутации и вторым входом компаратора, четвертый блок коммутации, первый вход которого соединен с выходом пульта управления, второй вход соединен с выходом первого блока коммутации, выход соединен с входом исполнительного привода, элемент задержки на такт, вход которого соединен с выходом третьего блока коммутации, а выход соединен со вторым входом сумматора и с первым входом второго блока коммутации, третий элемент И, первый вход которого соединен с выходом третьего элемента ИЛИ, второй вход соединен с выходом первого концевого выключателя, третий вход соединен с выходом первого порогового устройства, четвертый элемент И, первый вход которого соединен с выходом четвертого элемента ИЛИ, второй вход соединен с выходом второго концевого выключателя, третий вход соединен с выходом третьего порогового устройства, пятый элемент ИЛИ, первый вход которого соединен с выходом третьего элемента И, второй вход соединен с выходом четвертого элемента И, а выход соединен с третьим управляющим входом четвертого блока коммутации.
| Электрический трехфазный кабель высокого напряжения | 1926 |
|
SU7489A1 |
| RU 98115931 A, 20.09.1999 | |||
| СИСТЕМА СТАБИЛИЗАЦИИ И НАВЕДЕНИЯ ОБЪЕКТА | 1991 |
|
RU2107248C1 |
| СЛЕДЯЩИЙ ПРИВОД | 2006 |
|
RU2318232C2 |
| US 4326447 A1, 27.04.1982. | |||

