Устройство относится к изделиям для облегчения эвакуации пострадавших, раненых и доставки грузов по воде, в том числе боекомплектов. Устройство так же можно использовать для разминирования акваторий рек.
На данный момент из уровня техники не известны устройства имеющие малые размеры и малый вес, позволяющие производить эвакуацию пострадавших, раненых и доставку боекомплектов, а также других грузов по воде подразделениям находящихся на линии боевого соприкосновения в местности, где имеют место быть водные преграды, а также имеется большое количество островов, с высокой плотностью минирования водных акваторий.
Недостатками использования лодок для вышеуказанных задач, являются: габариты, вес, невозможность транспортировки лодки одним человеком с высокой скоростью. Для проведения эвакуации в лодке должен находиться, как минимум один военнослужащий, а как правило находится эвакуационная группа, для управления лодкой и погрузки пострадавшего, раненого, в условиях использования лодки, к примеру на реке Днепр это часто приводит в гибели эвакуационных групп, причины: использование противником fpv дронов и высокая плотность минирования реки.
Задачей является создание устройства, позволяющего производить эвакуацию пострадавших, раненых, доставку грузов по воде и разминирования акваторий рек, водохранилищ, прудов и озер, при нахождении оператора на значительном удалении.
Заявленное устройство имеет малые габариты и малый вес, таким образом один военнослужащий имеет возможность переносить устройство на большие расстояния в местах, где использование транспорта затруднено. Устройство можно использовать в зоне стихийных бедствий для эвакуации и помощи пострадавшим (например, разливы рек, зоны затопления).
Также заявленное устройство позволяет малозаметно (очень тихое в использовании и относительно лодки малые размеры) осуществить транспортировку к противоположному берегу реки или берегу острова (оператор управляющий устройством с пульта находится в укрытии на берегу), таким образом устройство устраняет недостаток использования лодки с личным составом, что существенно повышает критерий живучести личного состава в боевых условиях в местах рек и морей. Также оператор при использовании устройства с присоединенным металлическим вальцем может производить разминирование акваторий рек, водохранилищ, прудов и озер, что существенно повышает критерий живучести личного состава, принимающего участие в боевых действиях.
Техническим результатом является расширение арсенала средств устройств, обеспечивающих проведение эвакуации пострадавших, доставку грузов по воде с преградами, а также разминирование акваторий.
Технический результат достигается за счет того, что устройство эвакуации пострадавших (раненых) и доставки грузов по воде с возможностью разминирования включает валец, соединенный с полыми цилиндрами при помощи балок. Крепление балок выполнено по бокам в передней части цилиндров. Внутри каждого полого цилиндра расположены винты, двигатели, помпы, источники питания, блок управления устройством, антенны. Полые цилиндры соединены между собой при помощи кронштейна, с расположенной на нем площадкой, на которой установлен перископ с инфракрасным фонарем и видеокамерой. Причем сверху площадки выполнены ручки.
Управляется устройство при помощи персонального компьютера (ПК) или пульта управления устройством с экраном (ПУУ). Управление осуществляется через блок управления, установленный внутри полого цилиндра устройства.
На площадке расположены три ручки, одна спереди и две по бокам. Ручки дополнительно оборудуются ремнями, для закрепления пострадавших, раненых или грузов. Сама площадка выполнена из пластика с текстурной (шершавой) поверхностью, для предотвращения скольжения. Валец с балками могут быть выполнены металлическими.
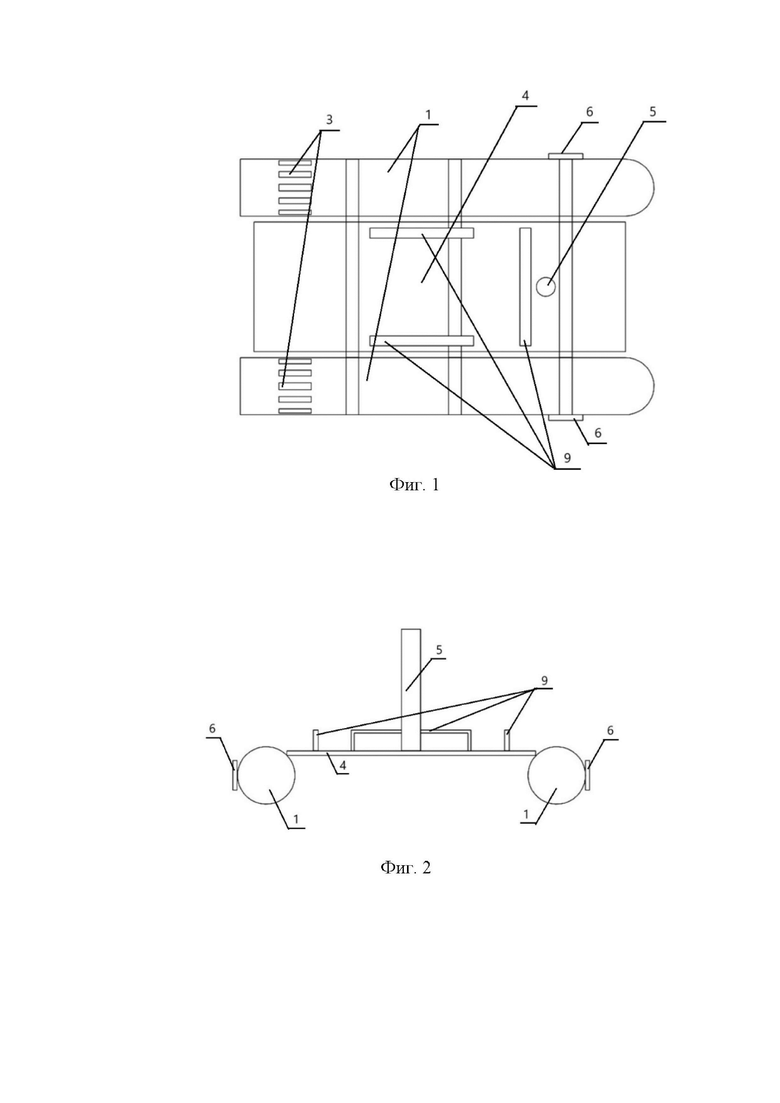
На Фиг. 1 представлено устройство вид сверху.
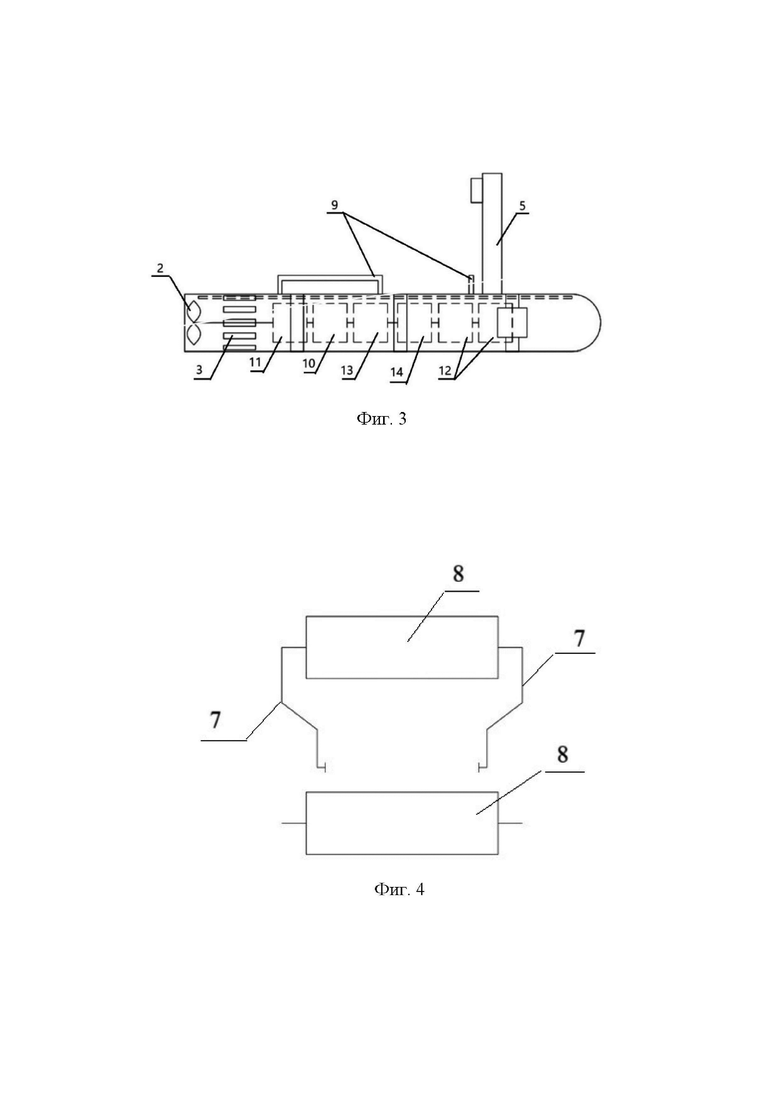
На Фиг. 2 представлено устройство вид спереди.
На Фиг. 3 представлено устройство вид сбоку.
На Фиг. 4 представлен валец вид сверху (изображение снизу) и валец с балками вид сверху (изображение сверху).
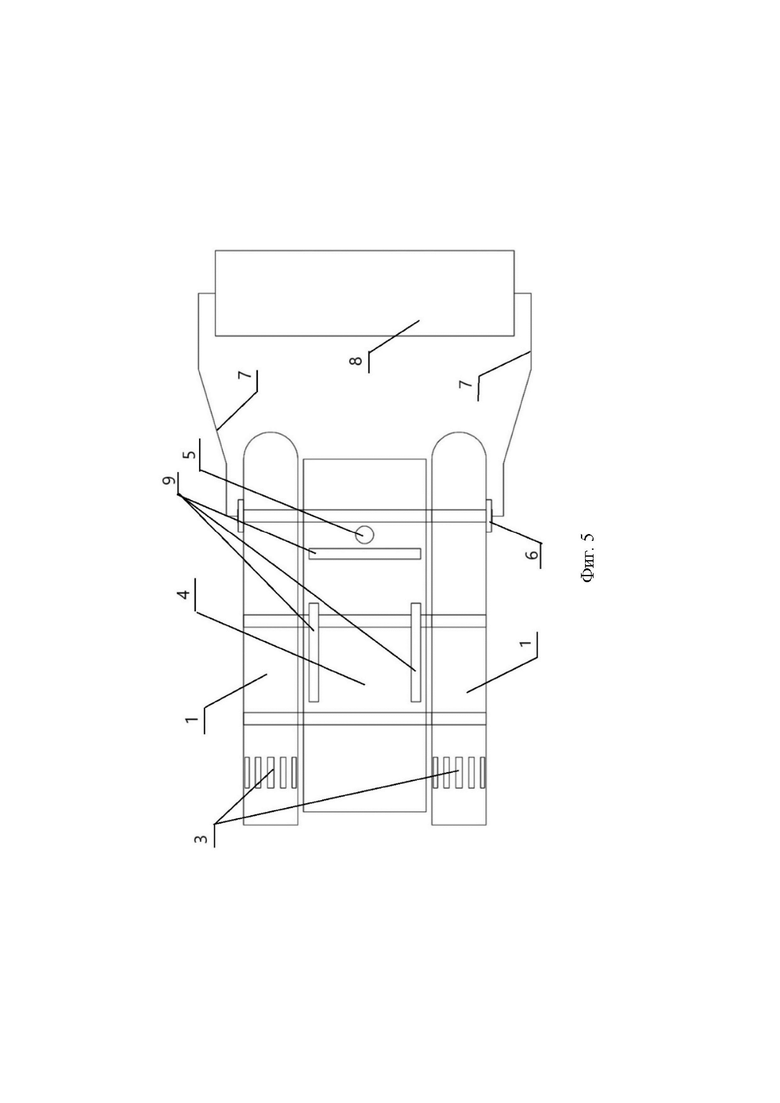
На Фиг. 5 представлено устройство с установленным вальцом вид сверху.
Устройство содержит: полые цилиндры 1; винты 2; прорези 3; кронштейн (на фигурах не представлен); площадку 4; перископ 5; элементы крепления 6 балок 7 вальца 8 к полым цилиндрам 1; ручки 9; двигатели 10; редукторы 11; источники питания 12; блоки управления 13; помпы 14; антенны (на фигурах не представлены).
Полые цилиндры 1 выполнены, например, из пластика. Места для размещения винтов 2 внутри полых цилиндров 1 имеют прямоугольные прорези 3 по всей окружности. Передняя часть полых цилиндров 1 выполнена в форме полусферы. Внутренняя часть полых цилиндров 1 выполнена диаметром, позволяющем разместить внутри каждого: винт 2 (располагаются в хвостовой части устройства), двигатель 10, помпу 14, редуктор 11, источник питания 12 (аккумуляторы), блок управления 13 устройством, антенны, жгуты электропроводки и коммутации устройств (на фигурах не представлены). Полые цилиндры 1 соединяются кронштейном, на котором выполнена площадка 4 с размещёнными перископом 5 с камерой видеонаблюдения (на фигурах не представлена) спереди и инфракрасным фонарем (на фигурах не представлен) с козырьком (на фигурах не представлен) сзади. Кронштейн для соединения полых цилиндров 1 выполнен таким образом, что по бокам закреплены кольца (на фигурах не представлены) диаметром, позволяющим охватить и зафиксировать полые цилиндры 1. Диаметр полых цилиндров 1 одинаков в носовой части и кормовой части. Длина устройства, может изменяться в зависимости от выбираемых габаритов, составных частей устройства, находящихся внутри (винт 2, редуктор 11, аккумуляторы 12, блок управления устройством 13, антенны, жгуты электропроводки и коммутации устройств). Кронштейн фиксирует полые цилиндры 1 (правый и левый) кольцами, которые фиксируются болтовыми соединениями. В передней части полых цилиндров 1, сбоку располагаются элементы крепления 6 балок 7 металлического вальца 8.
Устройство изготавливается следующим образом.
Полые цилиндры 1 и площадка 4 выполняются методом литья, например из пластика, специалистом (токарем-фрезеровщиком). Перископ 5 выполняется методом литья из алюминия и фрезеровки внешней и внутренних сторон корпуса перископа 5 для установки камеры видеонаблюдения и инфракрасного фонаря, специалистом (токарем-фрезеровщиком) для образования пазов нужной формы и размеров. В последствии перископ 5 окрашивается в цвета оттенков хаки для устранения металлического блеска. Помпа 14 используется, например, автомобильная, имеющая малые габариты, высокую производительность и выполнена малошумной. Винт 2, изготавливается из пластика (малый вес, малошумный) специалистом (токарем-фрезеровщиком). В виде источника питания 12 используют аккумуляторы, преимущественно, литий-железо-фосфатные аккумуляторы (LiFePO4). В местах для размещения винтов 2 внутри полых цилиндров 1 выполняют прямоугольные прорези 3 по всей окружности. Редуктор 11 используется для обеспечения наиболее эффективной работы винта 2 и изготавливается из нержавеющей стали, например марки 14Х17Н2 специалистом (токарем-фрезеровщиком). Ручки 9, расположенные на площадке 4, изготавливаются из нержавеющей стали, например марки 14Х17Н2 специалистом (токарем- фрезеровщиком), крепятся на болтовых соединениях к площадке 4. Блок управления 13 устройством (БУУ), пульт управления устройством (ПУУ), антенны, жгуты электропроводки и коммутации устройств изготавливается специалистом радиотехником и it специалистом с последующей привязкой/согласованием ПУУ к БУУ. Двигатели 10 используются электрические (высокая производительность, малошумный, бесщеточный - не создает искры). Двигателей 10 устанавливается два, по одному в каждом цилиндре 1, но при необходимости в случаях более высокой нагрузки может устанавливаться четыре (по два в каждом цилиндре 1). Кронштейн с кольцами крепления для соединения полых цилиндров 1 изготавливается из нержавеющей стали, например марки 14Х17Н2 специалистом (токарем- фрезеровщиком) и окрашивается в цвет хаки для устранения металлического блеска. Металлический валец 8 выполняется в форме цилиндра, по бокам располагаются балки 7 для удаления на безопасное расстояние от корпуса устройства, исполняется шириной на два метра шире, чем устройство, по одному метру с каждой стороны и отгружается таким образом, чтобы при высоте 1 м 40 см погружение вальца 8 в воду составляло 90 см. При помощи балок 7 валец 8 крепится к боковым сторонам каждого полого цилиндра 1 через элементы крепления 6, выполненные, например, в виде шарнирного соединения.
Сборка осуществляется специалистами: специалистом механосборочных работ, специалистом радиотехником, it специалистом при этом соблюдается последовательность выполнения операций сборки. Для применения устройство поставляется в собранном виде с соблюдением правил транспортировки. Для использования устройства оператор включает пульт после того, как на пульте загорается транспарант «Устройство обнаружено» устройство спускается на воду перископом 5 вверх.
Рассмотрим пример реализации устройства.
Управление устройством осуществляется путем передачи сигнала от пульта управления (ПУ) на блок управления 13 устройства (БУУ). Информация с видеокамеры перископа 5 передается через блок управления 13 на пульт управления, который выполняется с экраном, и информация с камеры перископа 5 отображается на нем. Инфракрасный фонарь с козырьком, расположенный на перископе 5 с противоположной стороны камеры, позволяет с берега визуализировать место нахождения устройства в темное время суток, а козырек делает его незаметным для воздушных средств обнаружения противника. Устройство также комплектуется притвотепловизионным одеялом, которым укрывается пострадавший (раненый) при транспортировке.
Дополнительно для возможности разминирования устройство комплектуется металлическим вальцом 8 с балками 7 крепления.
Затем оператор удаляется в укрытие и осуществляет управление, наблюдая за движением устройства на экране ПУУ, куда поступает сигнал от видеокамеры, расположенной в перископе 5. Движение устройства осуществляется путем приведения в движение бесщеточными электродвигателями 10 винтов 2, через редукторы 11. Для поворота налево оператор на пульте управляя (ПУУ) наклоняет рычаг джойстика в лево, после чего с ПУУ передается сигнал через антенны на БУУ после чего вращение винта 2 расположенного в левой части корпуса прекращается или замедляется, при этом правый винт 2 (в правом полом цилиндре 1) вращается с прежней скоростью, в следствии чего тяга справа больше, чем слева, так происходит поворот устройства влево. Для поворота направо, оператор на пульте управляя (ПУУ) наклоняет рычаг джойстика вправо, после чего с ПУУ передается сигнал через антенны на БУУ после чего вращение винта 2 расположенного в правом полом цилиндре 1 прекращается или замедляется при этом левый винт 2 вращается с прежней скоростью, в следствии чего тяга слева больше, чем справа, так происходит поворот устройства вправо. Для движения вперед оператор на пульте управляя (ПУУ) наклоняет рычаг джойстика прямо, после чего с ПУУ передается сигнал через антенны на БУУ, далее вращение винтов 2, расположенных в полых цилиндрах 1, происходит с одинаковой скоростью, сила тяги одинаковая и устройство двигается вперед. Для движения назад оператор на пульте управляя (ПУУ) наклоняет рычаг джойстика на себя, после чего с ПУУ передается сигнал через антенны на БУУ после чего происходит реверс вращения винтов 2, расположенных в правом и левом полых цилиндрах 1. Вращение происходит с одинаковой скоростью, сила тяги одинаковая и устройство двигается назад. Вода поступает в полые цилиндры 1 через отверстия 3 в зону затопления для работы винтов 2.
Транспортировка пострадавших осуществляется следующим образом.
Для транспортировки пострадавших, устройство доставляется по воде до берега. Пострадавший размещается на площадке 4 устройства и держится за ручки 9, расположенные на площадке 4, или закрепляется ремням. Оператор, управляя устройством с пульта, доставляет устройство с пострадавшим в точку эвакуации. В ночное время пострадавший накрывается противотепловизионным одеялом, после чего фиксируют ремнями. Также в ночное время перед транспортировкой пострадавшего (раненого), оператор с пульта отключает инфракрасный фонарь, чтобы устройство оставалось незаметным.
Разминирование устройством осуществляется следующим образом.
Для разминирования водоемов к устройству присоединяется металлический валец 8, который в диаметре составляет 1 м 40 сантиметров, с заглублением в воде 90 см. Металлический валец 8 крепится к устройству в места креплений при помощи элементов крепления 6, которые располагаются по бокам полых цилиндров 1 в передней части. Удаление металлического вальца 8 от устройства составляет четыре метра. Оператор, управляя устройством с пульта управления устройством (ПУУ) с присоединенным металлическим вальцом 8 двигается по акватории водоема, при столкновении металлического вальца 8 с миной в воде происходит детонация мины, таким образом происходит разминирование.
Положительная плавучесть устройства обеспечивается воздухом, находящимся в полых цилиндрах 1 и помпами 14, производящими откачку воды из полости полых цилиндров 1. Положительная плавучесть остается при массе полезной нагрузки 145 кг.
За счет наличия возможности удаленного управления устройством оператором, достигаемого наличием в конструкции устройства полых цилиндров 1 с расположенными внутри них винтами 2 (осуществляющих движение устройства), двигателями 10 (приводящими через редуктор 11 в движение винты 2), помпы 14 (обеспечивающей откачку воды), источниками питания 12 в виде аккумулятора (исключающий зависимость от стационарного источника питания), блоками управления 13 устройством и антеннами (обеспечивающих связь устройства с ПУУ), а также наличия площадки 4 , на которой установлен перископ 5 с инфракрасным фонарем и видеокамерой (обеспечивающие визуализацию окружающей среды от первого лица, места нахождения устройства в том числе в темное время суток) обеспечивается расширение арсенала средств устройств, которое осуществляет эвакуацию пострадавших (раненых), доставку грузов по воде с преградами, а также разминирование акваторий.
| название | год | авторы | номер документа |
|---|---|---|---|
| РОБОТИЗИРОВАННАЯ ПЛАТФОРМА ТРАНСПОРТИРОВКИ ЛЮДЕЙ И ГРУЗОВ | 2024 |
|
RU2836942C1 |
| АВАРИЙНО-СПАСАТЕЛЬНАЯ МАШИНА | 2004 |
|
RU2252161C1 |
| РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС ТЕХНИЧЕСКОЙ РАЗВЕДКИ | 2023 |
|
RU2813930C2 |
| АВАРИЙНО-СПАСАТЕЛЬНАЯ МАШИНА | 2005 |
|
RU2299819C1 |
| МНОГОФУНКЦИОНАЛЬНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС ОБЕСПЕЧЕНИЯ БОЕВЫХ ДЕЙСТВИЙ | 2013 |
|
RU2533229C2 |
| УСТАНОВКА РАЗВЕРТЫВАНИЯ ЛИНЕЙНЫХ ЗАРЯДОВ РАЗМИНИРОВАНИЯ (ВАРИАНТЫ) | 2019 |
|
RU2699165C1 |
| Система экстренной эвакуации и транспортировки пострадавших и грузов | 2023 |
|
RU2819380C1 |
| Наземный роботизированный комплекс | 2023 |
|
RU2819223C1 |
| Беспилотный летательный аппарат для эвакуации раненых и доставки грузов | 2024 |
|
RU2829580C1 |
Изобретение относится к изделиям для облегчения эвакуации пострадавших, раненых и доставки грузов по воде, в том числе боекомплектов, которые также можно использовать для разминирования. Плавсредство для эвакуации пострадавших, доставки груза по воде и разминирования включает валец, соединенный с полыми цилиндрами при помощи балок. Внутри полых цилиндров расположены винты, двигатели, помпы, источники питания, блоки управления устройством, антенны. Причем полые цилиндры соединены между собой при помощи кронштейна, с расположенной на нем площадкой, на которой установлен перископ с инфракрасным фонарем и видеокамерой. Достигается расширение арсенала средств устройств, обеспечивающих проведение эвакуации пострадавших, доставку грузов по воде с преградами, а также разминирование акваторий. 1 з.п. ф-лы, 5 ил.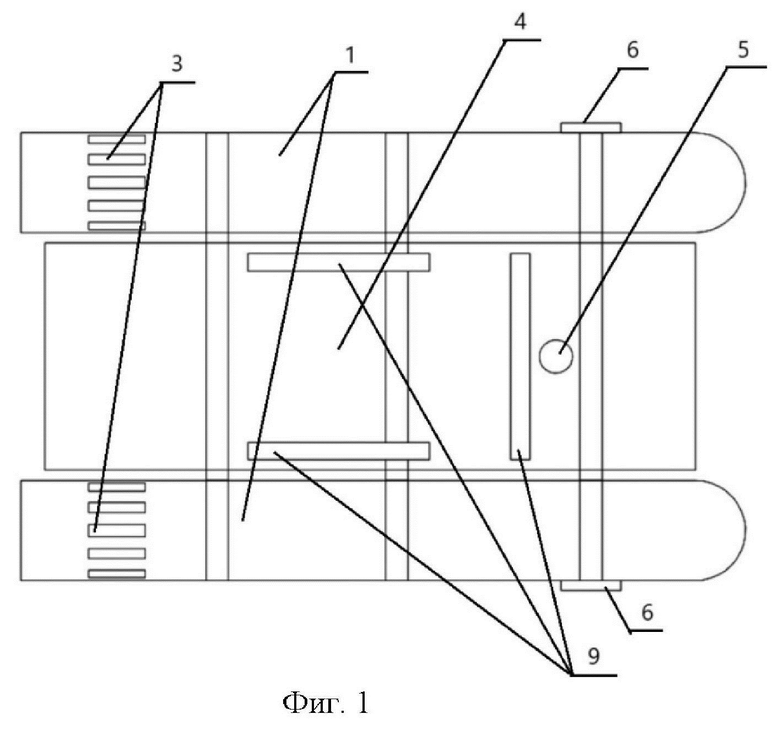
1. Плавсредство для эвакуации пострадавших, доставки груза по воде и разминирования, включающее валец, соединенный с полыми цилиндрами при помощи балок, внутри полых цилиндров расположены винты, двигатели, помпы, источники питания, блоки управления устройством, антенны, причем полые цилиндры соединены между собой при помощи кронштейна, с расположенной на нем площадкой, на которой установлен перископ с инфракрасным фонарем и видеокамерой.
2. Плавсредство для эвакуации пострадавших, доставки груза по воде и разминирования по п.1, характеризующееся тем, что сверху площадки выполнены ручки.
| Сетевое издание "CNews", Статья "В России запущен в серию тяжелый морской беспилотник "Визир", опубл.18.09.2024 (найдено в Интернет 21.02.2025), https://www.cnews.ru/news/top/2024-09-18_v_rossii_zapustili_v_seriyu | |||
| МОТОРНОЕ ПЛАВСРЕДСТВО С УСТРОЙСТВОМ УПРАВЛЕНИЯ | 2006 |
|
RU2381950C2 |
| СПАСАТЕЛЬНОЕ СРЕДСТВО | 2017 |
|
RU2740419C2 |
| Способ дифференциальной импульсной вольтамперометрии | 1986 |
|
SU1413512A1 |
| РОБОТИЗИРОВАННАЯ ПЛАВАЮЩАЯ МАШИНА | 2018 |
|
RU2714551C1 |
| Радиоуправляемый спасательный снаряд | 2018 |
|
RU2699951C1 |

