Изобретение относится к робототехнике, используемой для механизации и автоматизации основных и вспомогательных операций в производственных процессах.
Известен резонансный манипулятор (Авторское свидетельство СССР №1607229, МКП B25J 9/00,9/14, опубл. 30.03.92, Бюл. №12), содержащий установленное на основании подвижное звено с механической рукой и с исполнительным органом, систему упругих элементов, связывающих подвижное звено с основанием, и фиксаторы крайних положений подвижного звена, подвижное звено оснащено приводом с потоком рабочей среды в виде воздуха.
Недостатком аналога является использование для возвратно-поступательного перемещения подвижного звена привода с потоком рабочей среды в виде воздуха, имеющего низкий КПД, повышенный шум при работе, сложность управления положением подвижного звена, что ограничивает применение резонансного манипулятора.
Известно использование для возвратно-поступательного перемещения подвижного звена привода с бегущим электромагнитным полем, имеющего более высокий КПД, бесшумность при работе, несложную систему управления положением подвижного звена, что позволит расширить возможности применения резонансного манипулятора (Патент RU 197990 U1, B25J 9/10, 11.06.2020), который является прототипом предлагаемого технического решения.
Резонансный манипулятор, содержащий установленное на основание подвижное звено с механической рукой, имеющий исполнительный орган, систему упругих элементов, связывающих подвижное звено с основанием, фиксаторы крайних положений подвижного звена и привод возвратно-поступательного перемещения подвижного звена, выполнен в виде линейного асинхронного двигателя, снабженного блоком управления.
В рассматриваемом техническом решении используется привод на базе плоского линейного асинхронного двигателя (ПЛАД). ПЛАД имеет существенно низкие энергетические показатели (КПД) из-за краевых эффектов и большого воздушного зазора (см. Веселовский О.Н. Линейные асинхронные двигатели: учебное пособие / О.Н Веселовский, А.Ю. Коняев, Ф.Н Сарапулов. - М.: Энергоатомиздат, 1991. - 256 с.). Контроль перемещения механической руки в известном устройстве осуществляется датчиком знака скорости, который имеет сложную конструкцию. Применение в предложенном техническом решении электромагнитных захватных элементов, якоря которых жестко установлены на подвижном звене, позволяет им участвовать в организации колебательного процесса механической руки с силой притяжения якоря к электромагниту и последующей фиксацией механической руки в крайнем положении.
Технической задачей предлагаемого решения является повышение энергетических показателей, упрощение конструкции, расширение возможностей применения.
Техническая задача достигается тем, что в предлагаемом техническом решении подвижным звеном являются статор цилиндрического линейного асинхронного двигателя, а ротор установлен жестко на основании, причем подвижное звено снабжено датчиком положения, который связан с упомянутым блоком управления, а упомянутые фиксаторы выполнены в виде электромагнитных захватных элементов с якорями, причем упомянутые элементы установлены на основании и электрически связаны с блоком управления, а якоря жестко закреплены на подвижном звене.
Предлагаемое устройство представлено на чертеже.
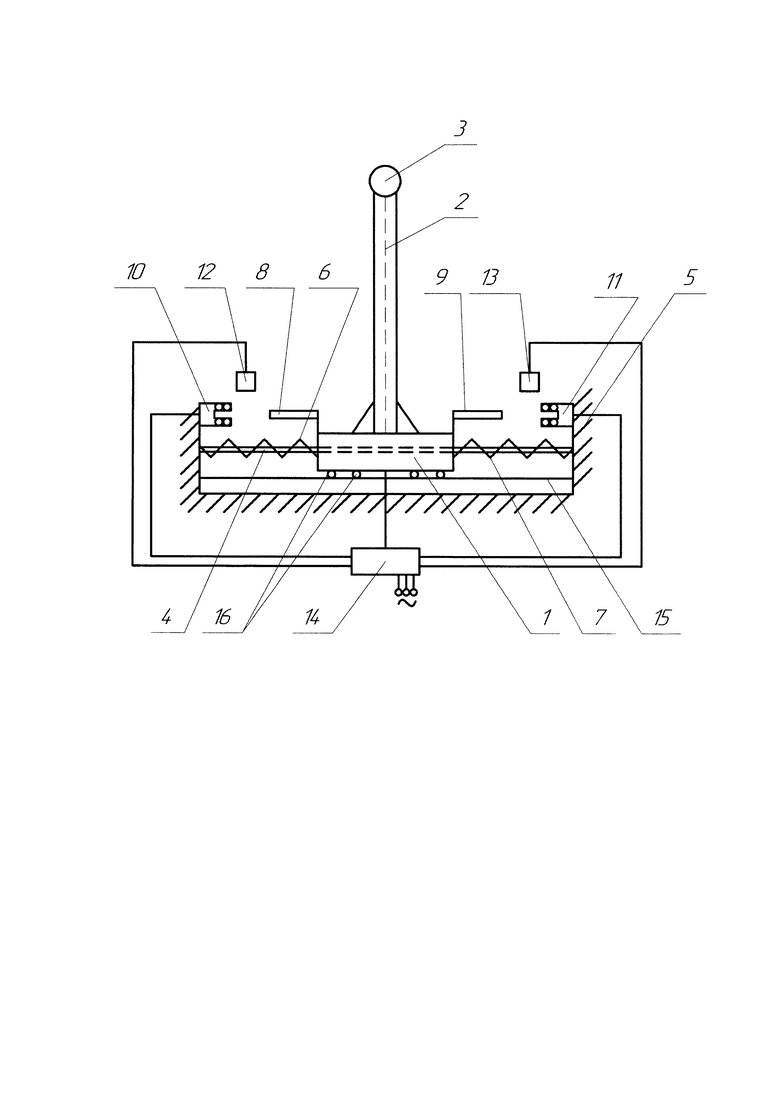
Резонансный манипулятор содержит статор 1 цилиндрического линейного асинхронного двигателя (ЦЛАД) являющегося подвижным звеном манипулятора с механической рукой 2 и с исполнительным органом 3. Ротор 4 ЦЛАД установлен жестко на основании 5. Упругие элементы 6 и 7 жестко связанные со статором 1 и основанием 5, фиксаторы 8 и 9 крайних положений статора 1 являются якорями электромагнитов 10 и 11. Около электромагнитов 10 и 11 установлены датчики положения 12 и 13 статора 1. Блок управления 14 электрически соединен со статором 1 ЦЛАД, электромагнитами 10 и 11 и с датчиком положения 12 и 13. Параллельно ротору 4, жестко на основании 5 установлена направляющая 15, с которой взаимодействуют ролики 16, установленные на статоре 1 ЦЛАД.
Устройство работает следующим образом.
В исходном положении подвижное звено 1 зафиксировано в одном из крайних положений, например, фиксатором 8 в электромагните 10. Упругий элемент 6 сжат. Статор (подвижное звено) 1 начинает движение после того, как блок управления 14 снимет напряжение питания с обмотки электромагнита 10 и фиксатор 8 освобождается от фиксации. Под действием предварительно деформированных упругих элементов 6 и 7 подвижное звено 1 (механическая рука 2 с исполнительным органом 3) перемещается вправо в направлении датчика положения 13. Одновременно датчик положения 12 дает команду блоку управления 14 на кратковременное подключение статора 1 к источнику трехфазного напряжения питания. Появляющееся при этом бегущее электромагнитное поле в статоре 1 ЦЛАД создает электромагнитную силу, приложенную к ротору 4 в том же направлении, так как ротор 4 зафиксирован жестко на основании 5, будет ускоряться движение статора 1 (подвижного звена манипулятора) и исполнительного органа 3, что исключает его колебания при разгоне. Потенциальная энергия упругих элементов 6, 7 и импульс электромагнитной силы ЦЛАД преобразуются в кинетическую энергию подвижного звена манипулятора.
После прохода среднего положения кинетическая энергия подвижного звена манипулятора преобразуется в потенциальную энергию упругих элементов 6, 7, вследствие чего статор 1 (механическая рука 2 и исполнительный орган 3) затормаживается, а упругий элемент 7 сжимается. Вблизи датчика положения 13 по его команде блок управления 14 включает электромагнит 11 и может кратковременно включить ЦЛАД с другим направлением электромагнитного поля и электромагнитной силы. Под действием электромагнитной силы исполнительный орган 3 тормозится синхронно со статором 1, что исключает его колебания. Пружина 7 сжимается подвижным звеном до предела, а фиксатор 9, являющийся якорем электромагнита 11, притягивается электромагнитным полем электромагнита и фиксирует подвижное звено в крайнем правом положении. Импульсы электромагнитной силы ускорения и торможения исключают колебания исполнительного органа 3 в крайних положениях, а разница импульса сил ускорения и торможения определяет величину энергии, передаваемой в колебательную систему, манипулятор для восполнения потерь. Далее, после того как фиксатор 9 выключением электромагнита 11 освобождает подвижное звено, исполнительный орган 3 совместно с механической рукой 2 аналогично перемещается вправо. Длительность импульса электромагнитной силы определяется наличием или отсутствием объекта манипулирования в исполнительном органе 3, а также конструктивными параметрами манипулятора.
Начальный момент включения статора 1 ЦЛАД, длительность его включения можно регулировать, учитывая уровень потерь в подвижной части манипулятора при перемещении объекта манипулирования, а также конструктивные параметры манипулятора изменением положения датчиком 12 и 13 относительно среднего положения. Причем, они могут быть расположены относительно среднего положения симметрично или не симметрично. Датчики положения управляют включением ЦЛАД таким образом, что наряду с компенсацией потерь на трение в резонансном манипуляторе исключаются паразитные колебания механической руки в крайних положениях. Фиксаторы 8 и 9 технического решения являются якорями электромагнитов 10 и 11, которые притягивают и прижимают механическую руку 2 к себе, тем самым, фиксируя ее в крайних положениях. Таким образом, дополнительно восполняются потери в подвижной части манипулятора. Применение в предложенном техническом решении электромагнитных захватных элементов, якоря которых жестко установлены на подвижном звене, позволяет им участвовать в организации колебательного процесса механической руки с силой притяжения якоря к электромагниту и последующей фиксацией механической руки в крайнем положении.
Направляющая 15 с роликами 16 исключает проворачивание статора 1 ЦЛАД вокруг оси при его движении на роторе 4.
В техническом решении в качестве датчиков положения 12 и 13 могут быть применены фотоэлектрические элементы (Кашкаров А.П. Устройства на светодиодах и не только / А.П. Кашкаров. - Москва: ДМК-Пресс, 2012 - 208 с.).
В предложенном техническом решении рабочая среда в виде электромагнитного поля участвует в восполнении потерь в колебательной системе резонансного манипулятора и его фиксации в крайних положениях.
Предлагаемое изобретение обеспечивает улучшение энергетических показателей устройства и расширение возможностей применения за счет упрощения конструкции.
| название | год | авторы | номер документа |
|---|---|---|---|
| Резервированный электромеханический силовой минипривод | 2020 |
|
RU2740466C1 |
| Резонансный привод промышленного робота | 1987 |
|
SU1570892A1 |
| Способ управления резонансной механической рукой | 1985 |
|
SU1346419A1 |
| Резонансная механическая рука | 1982 |
|
SU1171306A1 |
| МЕХАНИЧЕСКАЯ РУКА | 1993 |
|
RU2065354C1 |
| Способ управления резонансной механической рукой | 1986 |
|
SU1366388A1 |
| ПРОМЫШЛЕННЫЙ РОБОТ | 1994 |
|
RU2079401C1 |
| СПОСОБ УПРАВЛЕНИЯ СТАРТЕР-ГЕНЕРАТОРНОЙ СИСТЕМОЙ С ПЛАНЕТАРНЫМ РЕДУКТОРОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2236079C2 |
| Электромагнитное исполнительное устройство | 1990 |
|
SU1720099A1 |
| Способ управления приводом резонансного манипулятора | 1988 |
|
SU1593946A1 |
Изобретение относится к области механизации и автоматизации технологических операций. Резонансный манипулятор содержит установленное на основании подвижное звено с механической рукой и с исполнительным органом, систему упругих элементов, связывающих подвижное звено с основанием, фиксаторы крайних положений подвижного звена. Подвижное звено оснащено приводом возвратно-поступательного перемещения, который выполнен в виде цилиндрического линейного асинхронного двигателя (ЦЛАД), снабженного блоком управления с датчиками положения подвижного звена. Подвижным звеном является статор ЦЛАД, а ротор жестко установлен на основании. Упомянутые фиксаторы выполнены в виде якорей электромагнитных захватных элементов, электрически связанных с блоком управления и жестко установленных на подвижном звене. Использование изобретения позволяет упростить конструкцию устройства и расширить его технологические возможности. 1 ил.
Резонансный манипулятор, содержащий установленное на основании подвижное звено с механической рукой, имеющий исполнительный орган, систему упругих элементов, связывающих подвижное звено с основанием, фиксаторы крайних положений подвижного звена и привод возвратно-поступательного перемещения подвижного звена, выполненный в виде линейного асинхронного двигателя, снабженного блоком управления, отличающийся тем, что он снабжен датчиками положения подвижного звена, которые связаны с блоком управления, при этом упомянутый двигатель выполнен в виде цилиндрического линейного асинхронного двигателя, ротор которого жестко установлен на основании, а статор жестко связан с подвижным звеном, причем фиксаторы выполнены в виде электромагнитных захватных элементов, установленных на основании, и электрически связаны с блоком управления, а якоря упомянутых элементов жестко закреплены на подвижном звене.
| 0 |
|
SU197990A1 | |
| ПРОМЫШЛЕННЫЙ РОБОТ | 1994 |
|
RU2079401C1 |
| Резонансная механическая рука | 1982 |
|
SU1171306A1 |
| Способ перемещения резонансного манипулятора и устройство для его осуществления | 1988 |
|
SU1607229A1 |
| БЫСТРОРАЗЪЕМНЫЙ АГРЕГАТ | 2001 |
|
RU2194907C2 |
| JPH 10249777 A, 22.09.1998. | |||

