00
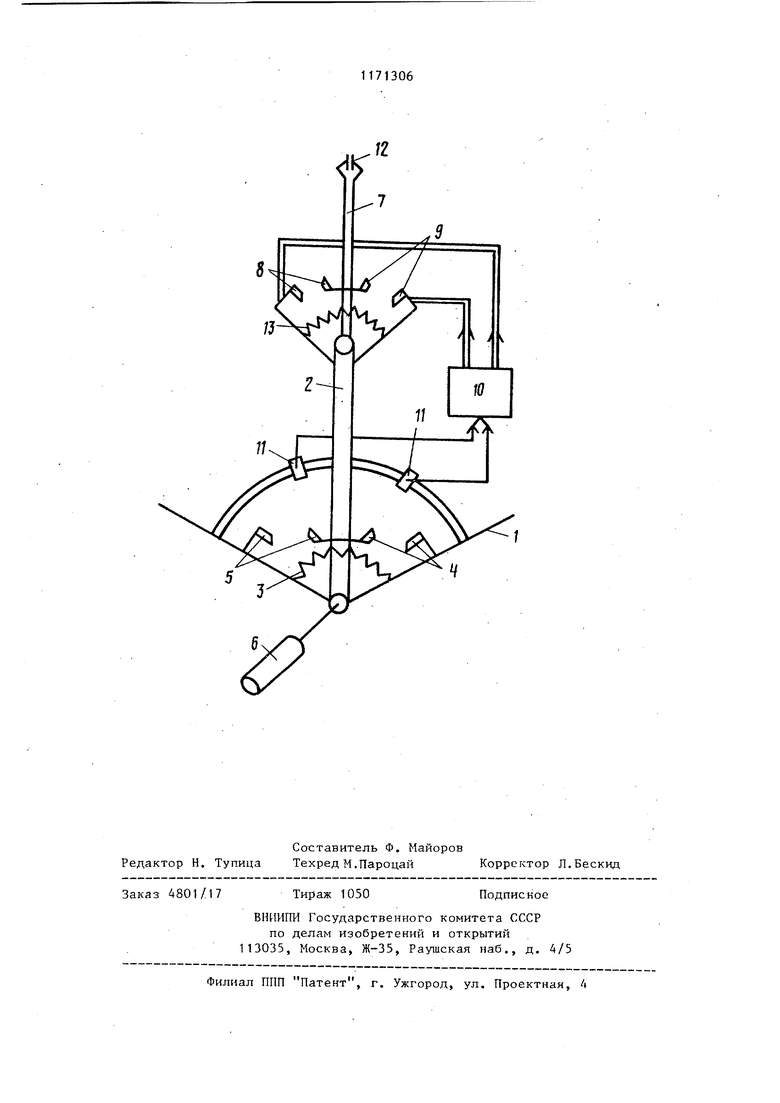
о о Изобретение относится к машииостроению и касается роботов и манипуляторов, используемых для механизации и автоматизации основных и вспомогательных операций в промышле ности, например для загрузки и выгрузки деталей со станков в машин,остроительном производстве„ Цель изобретения - повышение быстродействия манипулятора за счет уменьшения массы подвижных частей. На чертеже изображена кинематическая схема устройства. Устройство содержит шарнирно связанное с основанием 1 звено 2, подпружиненное к нему пружиной 3. Звено 2 снабжено фиксаторами 4 и 5 его крайних положений и приводом 6 поворота. Последовательно со звеном установлено шарнирно с ним связанно дополнительное звено 7 с фиксаторам 8 и 9 крайних положений, связанных блоком 10-управления. Звено 2 содержит два датчика 11 положения, соединеных с блоком 10 управления. Схват 12 установлен на дополнительном звене 7, подпружиненном к звену 2 пружиной 13,. Устройство работает следующим образом. В исходном йостоянии оба звена находятся в крайнем, например, лево положении, при этом фиксаторы 5 и находятся в зацеплении, пружины 3 и 13 обладают запасом потенциальной знергии, привод 6 выключен. В момент, когда необходимо начат движение, фиксатор 5 выводится из зацепления и включается привод 6, Потенциальная энергия пружины 3 переходит в кинетическую энергию звена 2 и жестко связанного с ним фиксатором 8 звена 7, что обеспечивает интенсивньй разгон звеньев. По сигналу одного из датчиков 11, кото рый первый взаимодействует со звено фиксатор 8 расцепляется и под дейст вием пружины 13 начинается интенсив ное перемещение звена.7 относительн звена 2, причем .перед началом этого движения звено 7 уже обладает запасом кинетической энергии. После тог как подвижные звенья пройдут через средние положения, их кинетическая энергия будет переходить в лотенциальную энергию пружин 3 и 13, что обеспечит их интенсивное торможение. Вблизи крайних положений звеньев, когда их скорости близки к нулю, фиксаторы 4 и 9 войдут в зацепление и зафиксируют звенья, привод 6 при этом выключается. Новое положение звеньев эквивалентно начальному, возвращение их в исходное положение может осуществляться аналогичным образом, только привод должен быть реверсирован, а управление фиксатором осуществляется по сигналу другого датчика 11, Введение двух датчиков 11 связано с тем, что механическая рука обычно должна, в одну сторону переносить груз, а в обратную сторону двигаться без груза; оптимальный момент начала относительного движения звеньев при прямом и обратном перемещении может быть различным, хотя в рассмотренном типе движения допустимо и обьединение двух датчиков в один. Диссипация, энергии при движении звена 7 компенсируется за счет динамического воздействия со стороны звена 2. Привод 6 должен сообщить звену 2 достаточное количество энергии, чтобы восполнить ее потери за счет диссипации при движении и за счет перекачки энергии от звена 2 к звену 7. Таким образом, приводной двигатель нужен лишь для того, чтоГ.ы скомпенсировать диссипацию энергии при движении обоих звеньев, силы инерции практически полностью должны компенсироваться упругими элементами, что свидетельствует о резонансной настройке системы. Один из датчиков 11 положения может быть установлен вблизи крайнего, например, левого, положения звена 2; пружина 13 тогда должна быть несимметричной. В этом случае относительное движение звена 7 при обратном ходе начнется, когда скорость эвена 2 близка к нулю, а компенсация диссипации при этом обеспечивается за счет несимметрии пружирш 13, взведение которой происходит при прямом ходе за счет динамического воздействия со стороны звена 2. Аналогично работает механическая рука, содержащая несколько дополнительных звеньев.
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1987 |
|
SU1444140A1 |
| Резонансный манипулятор | 2024 |
|
RU2840440C1 |
| Модуль промышленного робота | 1990 |
|
SU1715578A1 |
| ПОВОРОТНЫЙ ПРИВОД ЗВЕНА РЕЗОНАНСНОЙ МЕХАНИЧЕСКОЙ РУКИ | 2003 |
|
RU2271273C2 |
| Способ перемещения резонансного манипулятора и устройство для его осуществления | 1988 |
|
SU1607229A1 |
| Способ управления резонансной механической рукой | 1986 |
|
SU1682160A1 |
| Задающий орган манипулятора | 1986 |
|
SU1393619A1 |
| Устройство для переноса и разделения деталей | 1985 |
|
SU1247260A1 |
| Способ управления резонансной механической рукой | 1985 |
|
SU1346419A1 |
| Манипулятор | 1986 |
|
SU1321581A1 |
РЕЗОНАНСНАЯ МЕХАНИЧЕСКАЯ РУКА, содержащая установленное на основании и подпружиненное к нему звено с фиксаторами его .крайних положений, снабженных блоками управления, привод поворота звена и схват, отличающаяся тем, что, с целью повышения быстродействия, она снабжена по крайней мере одним дополнительным звеном с фиксаторами его крайних положений, снабженными блоками управления, и датчиками положения звеньев, соединенными с блоками управления, при этом звенья установлены последовательно, шарнирно соединены между собой и подпружинены один к другому, а схват расположен на крайнем дополнительном звене.
| Механическая рука | 1975 |
|
SU568346A3 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| ПРИБОР ДЛЯ ЗАПИСИ И ВОСПРОИЗВЕДЕНИЯ ЗВУКОВ | 1923 |
|
SU1974A1 |
