Изобретение относится к подъемно транспортному машиностроению, в час ности к уравновешенным манипулятора и может быть использовано в погрузо ных манипуляторах и промышленных ро ботах. Известен уравновешенный манипуля тор, содержащий колонну с направляю щими, в которых расположены каретки вертикального и горизонтального пер мещений, рычажную систему с шарнирн соединенным с кареткой вертикального перемещения ведущим звеном и рычагом и механизм уравновешивания рычажной системы Cl3. Однако у известного манипулятора недостаточная точность уравновешивания из-за большой инерционности противовеса. Кроме того, большая неточность уравновешивания возникает при выполнении механизмов уравновешивания рычажной системы в манипуляторах с большой стрелой. Все это создает ненадежность работы. Цель изобретения - повышение надежности в работе. Для этого в уравновешенном манипуляторе, содержащем колонну с направляющими, в которых расположены каретки вертикального и горизонталь ного перемещений, рычажную систему с шарнирно соединенным с кареткой вертикального перемещения ведущим звеном и рычагом и механизм уравновешивания рычажной системы, последт НИИ состоит из пневмоцилиндра посто -янного давления, размещенного на ка ретке горизонтального перемещения, и закрепленного на штоке пневмоцилиндра ролика, при этом на колонне смонтирована планка, взаимодействующая с роликом и образующая с ведущим звеном, рычагом и кареткой гори зонтального перемещения шарнирный параллелограмм. На чертеже изображен манипулятор, общий вид. Манипулятор содержит установленные на колонне (не показано) каретки вертикального 1 и горизонтального 2 перемещения, рычажную систему с грузодержателем 3, рычагом 4 и ведущим звеном 5, Ведущее звено 5 шарнирно соединено с кареткой 1 вертикального перемещения. Кроме того, рычаг 4 и ведущее звено 5 шарнирно соединены с кареткой 2 горизонтального перемещения. Консольные концы ведущего звена 5 и рычага 4 шарнирно соединены с планкой б и образуют таким образом шарнирный параллелограмм, звеньями которого являются консольные концы ведущего звена 5, рычага 4, каретка 2 горизонтального перемещения и планка 6, Механизм уравновешивания рычажной системы выполнен в виде силового цилиндра 7, на штоке силового цилиндра закреплен ролик 8, взаимодействуняций с продолжением планки 6, Манипулятор работает следующим образом. Перемещаясь, грузодержатель 3 воздействует на рычажную систему. Ведущее звено 5 и рычаг 4 воздействуют на планку 6, сообщая ей перемещение (возможное перемещение планки б показано пунктиром), При этом планка всегда парешлельна горизонтальной плоскости. Перемещаясь, планка 6 взаимодействует с роликом 8 и сообщает штоку пневмоцилиндра осевое перемещение. Изменением давления в пневмоцилиндре осуществляют уравновешивание рычажной системы манипулятора , Уравновешенный манипулятор даст при использовании положительный эффект, заключающийся в повышении его надежности в работе и расширении Функциональных возможностей.
| название | год | авторы | номер документа |
|---|---|---|---|
| Уравновешенный манипулятор | 1981 |
|
SU1000271A1 |
| Урановешенный манипулятор | 1979 |
|
SU848350A1 |
| Манипулятор | 1982 |
|
SU1007967A1 |
| Сбалансированный манипулятор | 1986 |
|
SU1379105A1 |
| Сбалансированный манипулятор | 1988 |
|
SU1517251A1 |
| Стенд для сборки и разборки прокатных валков полосовых и дрессировочных станов | 1988 |
|
SU1588454A1 |
| АВТОМАТИЧЕСКАЯ ЛИНИЯ ДЛЯ ГОРЯЧЕЙ ОБЪЕМНОЙ ШТАМПОВКИ ПРЕИМУЩЕСТВЕННО ЗВЕНЬЕВ ГУСЕНИЧНОЙ ЦЕПИ | 1992 |
|
RU2035254C1 |
| ПОДВЕСНОЕ МАНИПУЛИРУЮЩЕЕ УСТРОЙСТВО С РУЧНЫМ УПРАВЛЕНИЕМ | 2014 |
|
RU2561559C1 |
| УСТРОЙСТВО ДЛЯ ШИРЕНИЯ КОРДА ПЕРЕД ОБРЕЗИНИВАНИЕМ | 1991 |
|
RU2021400C1 |
| Манипулятор | 1984 |
|
SU1263522A1 |
УРАВНОВЕШЕННЫЙ МАНИПУЛЯТОР содержащий колонну с направляющими, в которых располо)й:ены каретки вертикального и горизонтального перемещений, ралчажную систему с шарнирно соединенным с кареткой вертикального перемещения ведущим звеном и рычагом и механизм уравновешивания рычажной системы, отличающийся тем, что, с целью повышения надежности в работе, механизм уравновешивания рычажной системы состоит из пневмоцилиндра постоянного давления, размещенного на каретке горизонтального перемещения, и закрепленного на штоке пневмоцилиндра ролика, при этом на колонне смонтирована планка взаимодействукяцая с роликом и образующая с ведущим звеном, рычагом и кареткой горизонтального перемещения шарнирный параллелограмм. ; 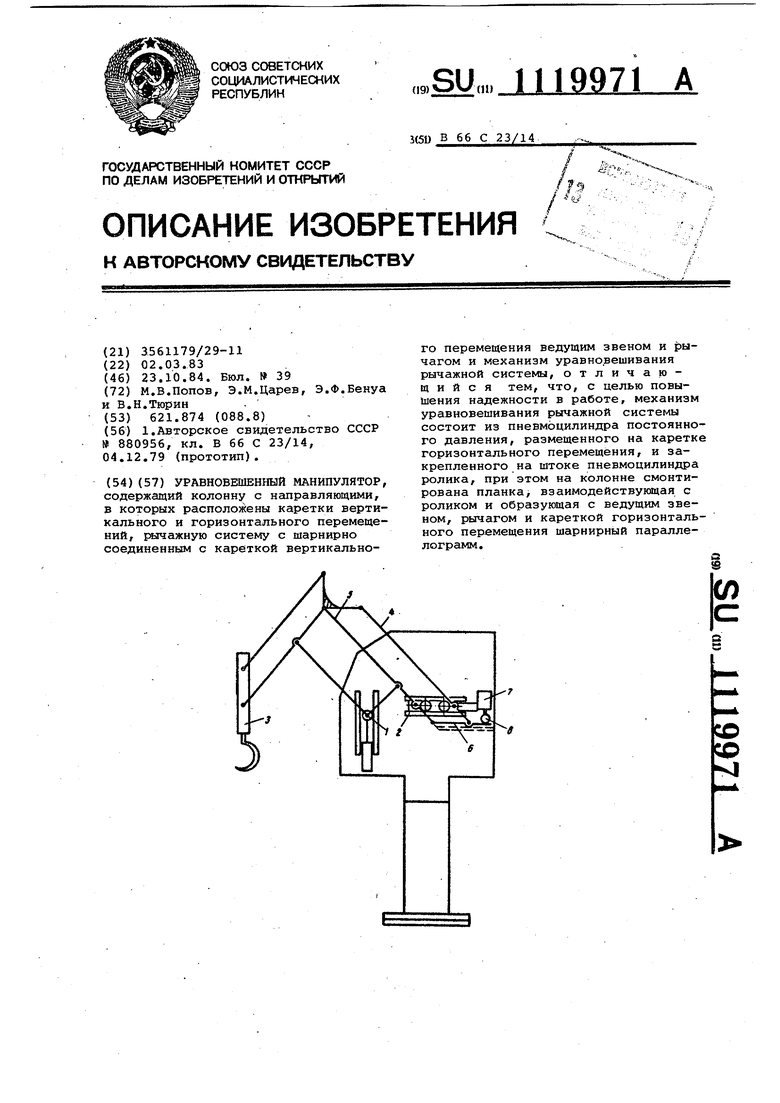
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
