(Л
00
vi
4;
Изо(3ретение относится к машиностроению, а именно к промьшшенным роботам манипуляторам для автоматизации и Йеханизации технологических операций. I Цель изобретения - повышение надеж hocTH за счет уменьшения количества подвижных звеньев.
На фиг. 1 показан манипулятор, общий вид; на фиг. 2 - схема установки пружины.
На колонне 1 в ее верхней части установлены две щеки 2, на внутренних стенках которых предусмотрены горизонтальные 3 и вертикальные 4 направляющие. В вертикальных направляющих на роликах установлена приводная каретка 5, шарнирно связанная с ведущим звеном 6 шарнирно-рычажного механизма пантографа. Пружина 7 крепится на ведущем звене 6 пантографа в точке 8. Второй ее конец закреплен на гибком элементе 9, закрепленном другим концом на каретке 5 в точке 10 на расстоянии а 6т оси О шарнира установки ведущего звена пантог афа на каретке и охватывающем блок 11 диаметра d, расположенный на ведущем звене 6 на
расстоянии а + от оси О с
центриситетом е.
Уравновешенный манипулятор работает следующим образом.
В исходном положении пружина 7 находится в свободном состоянии, причем точка схода гибкого элемента 9 с блока 11 совпадает с точкой крепления троса на каретке 5.
При повороте звена 6 на угол Ц происходит удлинение пружины на величину Д1, равную длине участка троса от .точки его закрепления на каретке 5 до точки схода с блока 11:
(а
Л1 2 а S in -- ,
что приводит к возникновению в набегающей и сбегающей ветвях троса силы F:
с г - л I
г - V./ и L. ,
где С - жесткость пружины.
Поскольку блок II установлен на
d рычаге с эксцентриситетом е . ,
момент М„ , создаваемый растянутой пружиной относительно шарнира О на i 2
У 2
плече h а cos
равен
cos- а - C-sIntp.
5 о 5
0
.
0
М
При С - уравновешивающий мо- а
мент, создаваемый пружиной, равен моменту, создаваемому шарнирно-рычаж- ным механизмом:
М пр М о S i п ср . Формула изобретения
Уравновешенный манипулятор, содержащий колонну, смонтированные на ней две щеки с направляющими, в которых размещена каретка, шарнирно-рычажный механизм пантографа и пружину, связанную одним концом с ведущим звеном пантографа, а другим - с одним концом гибкого элемента трособлочной системы, причем ведущее звено пантографа шарнирно связано с кареткой, отличающийся тем, что, с целью повьш ения надежности за счет уменьшения количества подвижных звеньев, один из блоков трособлочной системы смонтирован на ведущем звене пантографа, а другой конец гибкого элемен-п та закреплен на каретке.
Фиг.2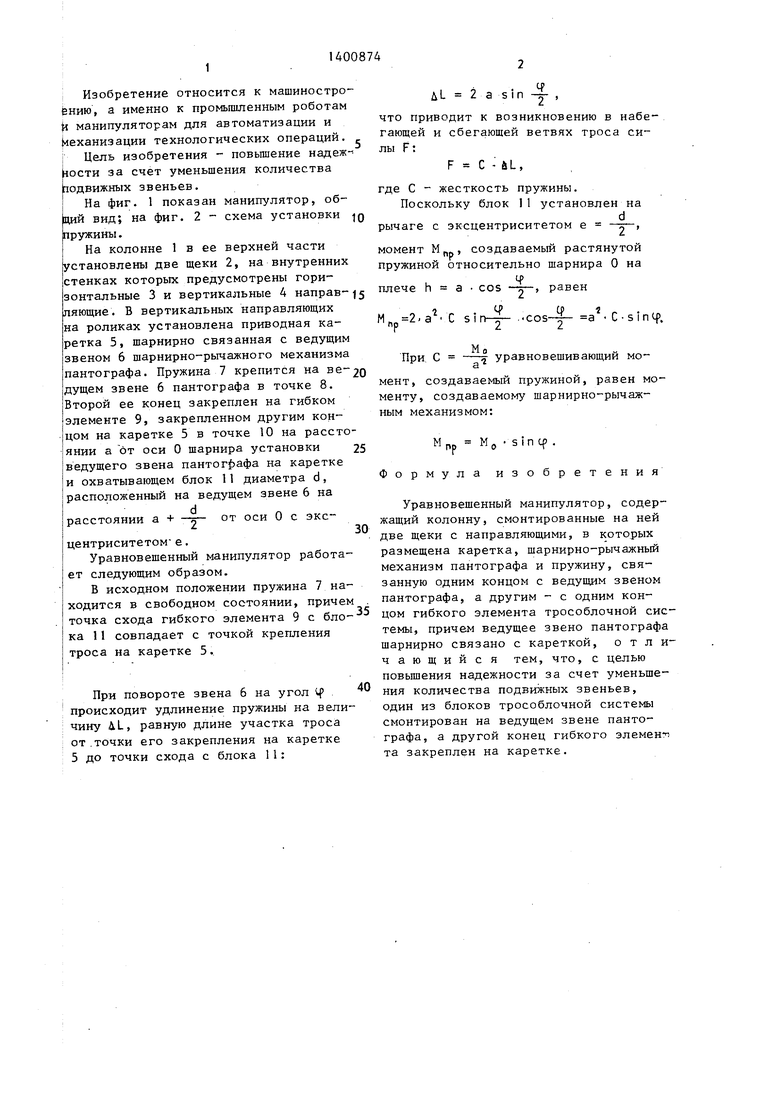
| название | год | авторы | номер документа |
|---|---|---|---|
| Урановешенный манипулятор | 1979 |
|
SU848350A1 |
| Сбалансированный манипулятор | 1987 |
|
SU1423367A1 |
| Уравновешенный манипулятор | 1981 |
|
SU1000271A1 |
| Манипулятор | 1980 |
|
SU935450A2 |
| Манипулятор | 1982 |
|
SU1049414A1 |
| МАНИПУЛЯТОР | 1989 |
|
SU1584290A1 |
| МАНИПУЛЯТОР | 1988 |
|
SU1487338A1 |
| Рука манипулятора | 1979 |
|
SU841963A1 |
| Захват манипулятора | 1977 |
|
SU642151A1 |
| Манипулятор | 1986 |
|
SU1364467A1 |
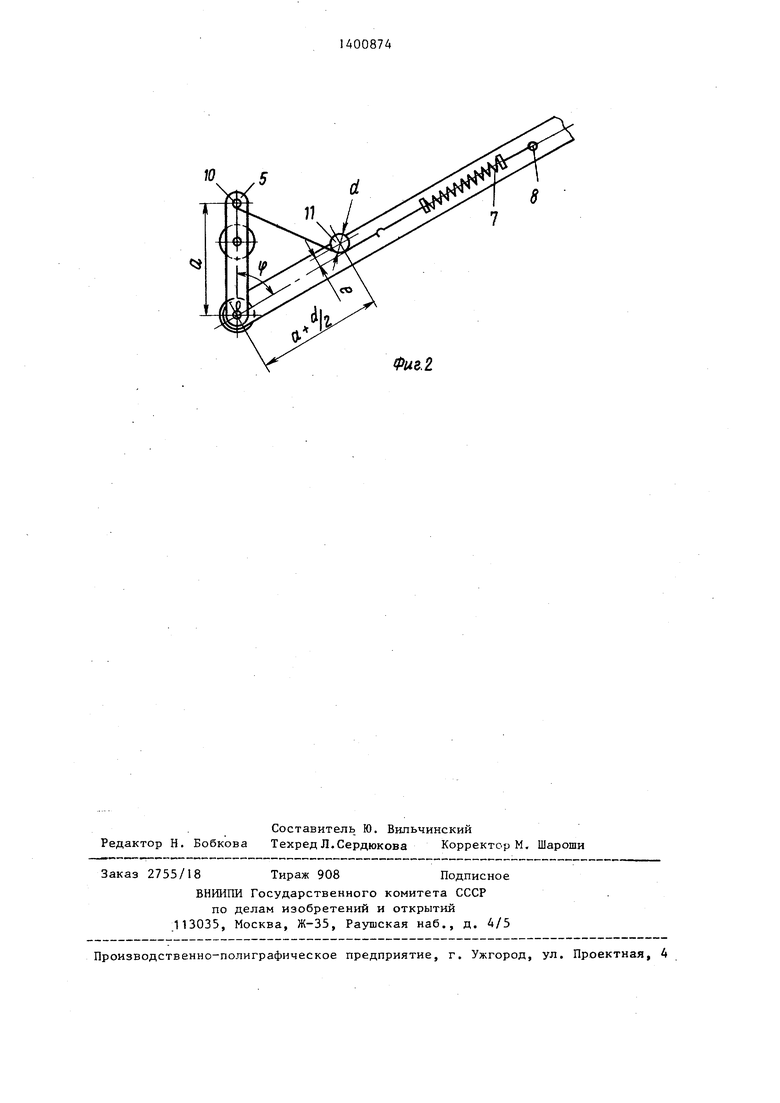
Изобретение относится к области машиностроения, а именно к промьшше-т- ным роботам и манипуляторам для автоматизации и механизации технологических процессов. Цель изобретения - по- вьшение надежности за счет увеличения количества подвижных звеньев. При увеличении радиуса обслуживания и угла наклона ведущего звена 6 автографа к оси колонны 1 происходит натяжение пружины 7, одним концом связанной в точке В с звеном 6, а другим - с гибким элементом 9, проходящим через блок 11 и закрепленным на каретке 5, при этом звано 6 шарнирно связано с кареткой 5. 2 ил.
| Урановешенный манипулятор | 1979 |
|
SU848350A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
