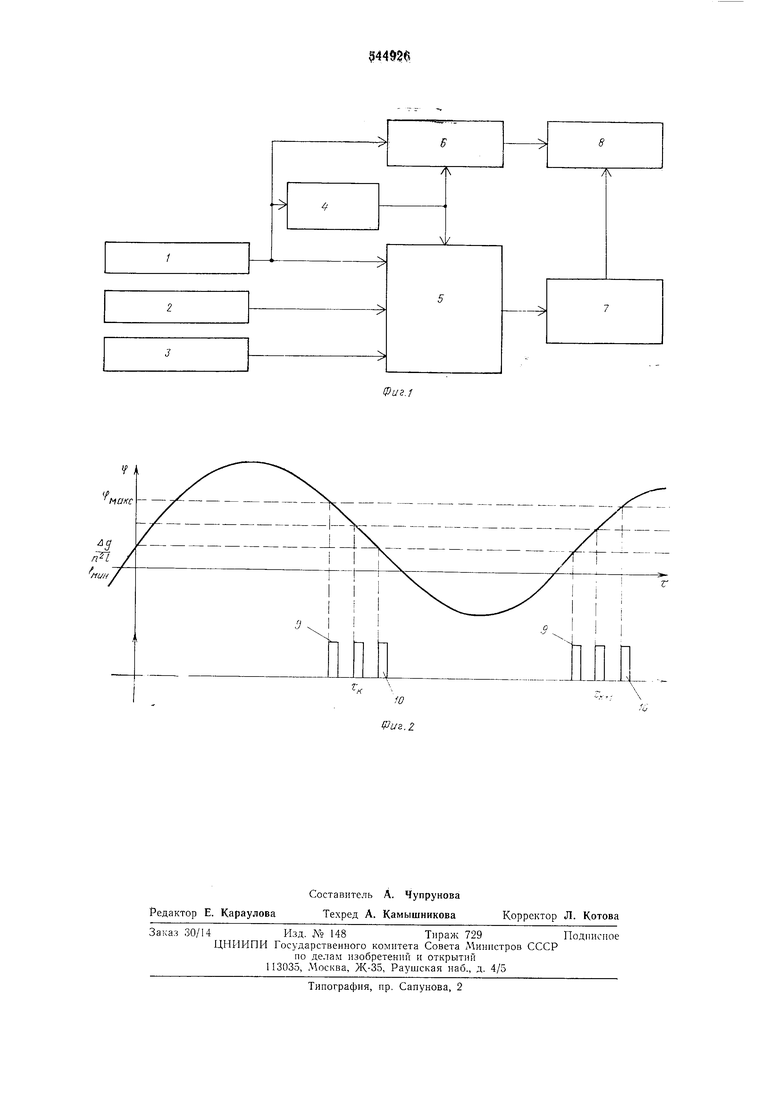
мента измерения Тк 7, блока осреднения значений приращения силы тяжести Ag 8. Сиг11алы ф слабодемпфированного маятника 1, л: горизонтального акселерометра 2, z вертикального акселерометра 3 поступают в блок математической обработки этих величин, где производятся вычисления по формуле , ,. rf , :.
О {П - --г -45- COS С9 -
йт «йт/г ;
X .
--573ШТ
2пЧ
пЧ
где « - собственная частота маятника;
k - коэффициент демпфирования маятника; / - приведенная длина маятника; go - сила тяжести на опорном пункте.
Сигнал ф слабодемпфированного маятника 1 поступает также на блок математической обработки величины угла отклонения 6, где
производятся вычисления по формуле ср,
и на формирователь диапазона измерений приращения силы тяжести 4. В формирователе дианазона измерений 4 сигнала ф угла отклонения маятника 1 сравнивается с заданными постоянными сигналами углов отклонения этого маятника фмакс н фыии, пропорциональных максимальному и минимальному значениям приращения силы тяжести в районе работ. В момент времени, когда угол отклонения ф маятника равен фмакс или фмин, вырабатаваются импульсы начала 9 или импульсы конца 10 работы (фиг. 2) блоков математической обработки 5 и 6. Если угол отклонения ф маятника, достигнув величины фмакс, уменьшается или, достигнув величины финн, увеличивается то вырабатывается имнульс началаработы. Импульс конца, работы вырабатывается, если ф, достигнув значения фмин, уменьшается и увеличивается, достигнув фмакс. Импульсы начала и конца работы с формирователя 4 поступают в блоки математической обработки 5 и б. Этими импульсами блоки 5 и 6 включаются на период времени, когда па показания маятника 1 возмущения оказывают малое влияние, а угол отклонения от положения нулевого отсчета мал и лежит в пределах между фмакс и фйши. Результат вычислений с блока математической обработки 5 поступает на формирователь команды момента измерения Тк 7. Формирователь 7 вырабатывает имнульс в момент, когда результат вычислений блока 5 ранен нулю. Этот импульс подается ни блок осреднения 2т значений Ag- 8. Таким ббразом, в блоке 8 фиксируются и осредняются только те значения велиП / о
uHuui ф поступающие с блока 6, коточины
cos
рые имеют место в моменты Тк, т. е., когда сумма влияния возмущений в показаниях маятника равна нулю, а показание маятника соответствует искомому значению силы тяжести. Таким образом, устройство позволяет получать значение гравитационного поля без фазовых и амплитудных искажений, а измерения в моменты времени, когда слабодемпфированный маятник не возмущен и угол его отклонения мал, дают возможность проводить измерения за короткий промежуток времени с высокой точностью.
Формула изобретения
Устройство для измерения силы тяжести, содержащее слабодемпфированиый горизонтальный маятник, горизонтальный и вертикальный акселерометры, отличающееся
тем, что, с целью повышения точности, в него введены формирователь диапазона измерений приращення силы тяжести, блок математической обработки величины угла отклонения маятника, блок математической обработки величин горизонтального и вертикального ускорений и величины угла отклонения маятника, формирователь команды момента измерения, блок осреднения значений приращения силы тяжести, причем выходы слабодемифированного маятника, горизонтального и вертикального акселерометров связаны с блоком математической обработки величины горизонтального и вертикального ускорений и угла отклонения маятника, а выход слабодемнфированного маятника связан с блоком математической обработки величины угла отклонения ;маятника, подключенного к блоку осреднения, и формирователем диапазона измерений, выходы которого связаны с блоком математической обработки угла отклонения маятника и блоком математической обработки величины угла отклонения маятника и величин горизонтального и вертикального ускорений, выход которого через формирователь команды момента измерений связан с блоком осреднения, выход которого подключен к выходу блока математической обработки величины угла отклонения маятника.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОТЛАДКИ БОРТОВОГО ГРАВИТАЦИОННОГО ГРАДИЕНТОМЕТРА | 1989 |
|
SU1823661A1 |
| Способ определения ускорения силы тяжести на подвижном основании | 1981 |
|
SU1000983A1 |
| Устройство для измерения силы тяжести на подвижном основании | 1976 |
|
SU575597A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ АЗИМУТА И ЗЕНИТНОГО УГЛА СКВАЖИНЫ И ГИРОСКОПИЧЕСКИЙ ИНКЛИНОМЕТР | 1999 |
|
RU2159331C1 |
| Способ определения метацентрической высоты подводных и надводных объектов и устройство электронного угломерного прибора для его осуществления | 2018 |
|
RU2670319C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВ ОРИЕНТАЦИИ СКВАЖИНЫ И ИНКЛИНОМЕТР | 2003 |
|
RU2253838C2 |
| Способ определения зенитного угла и азимута скважины и гироскопический инклинометр | 2018 |
|
RU2682087C1 |
| УСТРОЙСТВО И СПОСОБ ИЗМЕРЕНИЯ СИЛЫ ТЯЖЕСТИ | 2002 |
|
RU2198414C1 |
| БУЙ ДЛЯ ОПРЕДЕЛЕНИЯ ХАРАКТЕРИСТИК МОРСКИХ ВЕТРОВЫХ ВОЛН | 2014 |
|
RU2561229C1 |
| Гиростабилизированный кварцевый гравиметр и способ его калибровки | 2015 |
|
RU2619132C1 |
t rit/f - 4--. .„
