Изобретение относится к автрма тическому контролц) и может быть использовано для контроля электричеких параметров полупроволниковьк и магнитных структур на пластине при их производстве.
Известно устройство для контроля полупроводниковых структур, содержащее оптическую систему, манипулятор, включаняций прюдметный стол с механизмом шагового перемещения его по взаимно перпендикулярным осям X и У. В известном устройстве контроль проверяемых структур осуществляется .по следующему циклу: на контактные площадки проверяемых структур опускаются зонды, каждый из которых имеет свой привод, до касания с ними, проводится контроль и маркировка,I после чего осуществляется подъем зондов и перемещение предметного стола на новую позицию для повторения цикла измерения l.
Наиболее.близким по технической сущности к предлагаемому техническому решению является устройство для контроля электрических параметров полупроводниковых и магнитных структур йа пластине, содержащее оптическую систему, манипулятор в.виде предметного стола с механизмом шагового перемещения по взаимно перпендикулярным направлениям, .механизм перемещения рамки с зондами, соединенный с приводом 2.
Однако известные устройства не обеспечивают высокого качества контроля структур.
Цель изобретения - повышение качества контроля структур. .
Поставленная цель достигается тем, что в устройстве для контроля электрических параметров полупроводниковых и магнитных структур на пластине, содержащем оптическую систему, манипулятор в.виде предменого стола с механизмом uiaroBoro перемещения по взаимно перпендикулярным осям, механизм перемещения рамки с зондами, соединенный с приводом, снабжен рычагом и рачажным ограничителем колебаний, установленым перпендикулярно рычагу, причем рамка с зондами установлена на рычаге с возможностью взаимодействия с рычажным ограничителем кол баний«
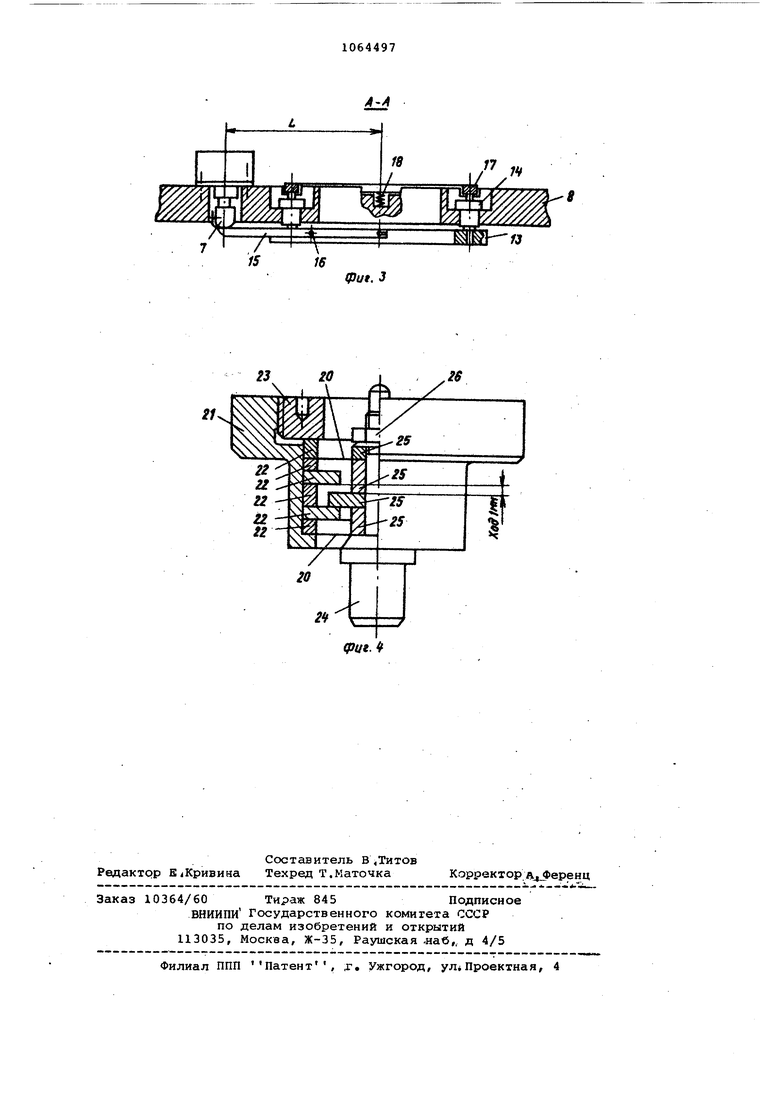
На фиг. 1 изображено устройство, общий вид; на фиг. 2 - механизм перемещения рамки с зондами; на фиг. 3 - разрез А-А на фиг. 2; на фиг. 4 - вид упругой направляющей
Устройство содержит механизм 1 шагового перемещения предметного стола 2 установлен в корпус 3, механизм 4 перемещения зондов 5 по
оси Z связан с приводом от шагового двигателя 6 через пару винт-гайка 7 и установлен на несущей плите 8 В корпусе 3 устройства установлена магнитная система, состоящая из двух электромагнитов, нижнего 9 и верхнего 10. Оптическая система 11, установленная на несущей плите 8, служит для визуального контроля процесса контактирования.
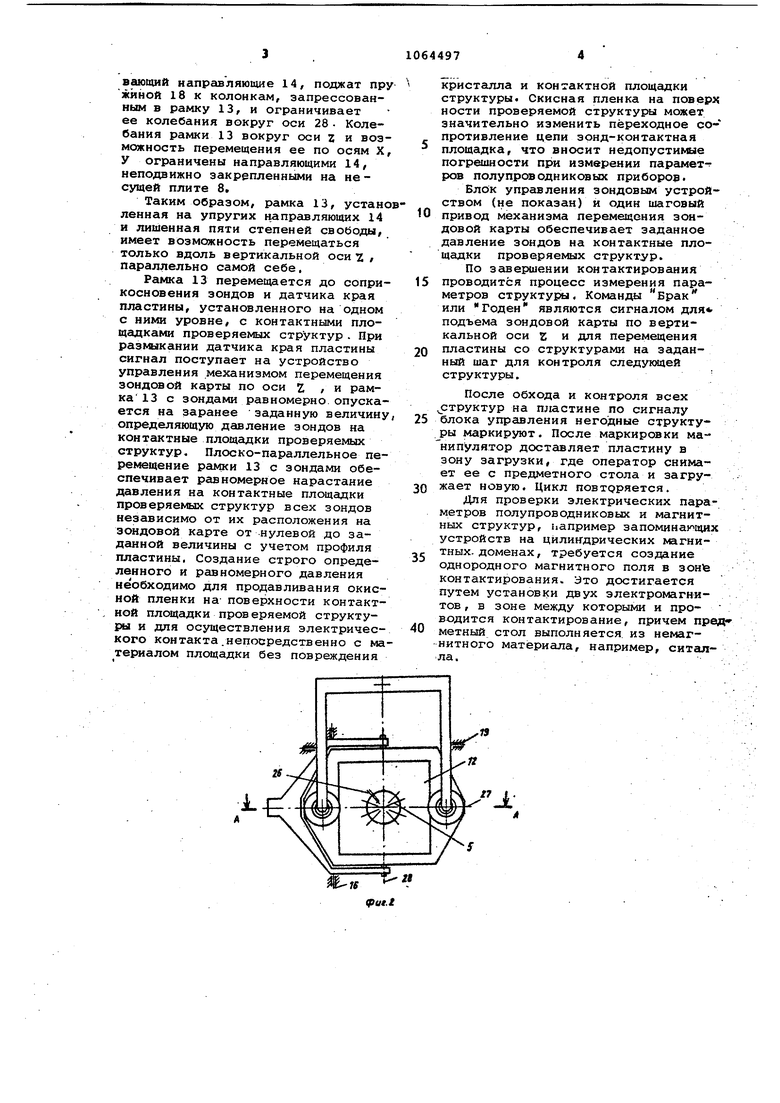
Кроме того, устройство содержит механизм перемещения зондовой карты 12 по оси 1 , укрепленной в подвижной рамке 13, которая посредством двух направляющих 14 на. упругих элементах подвешена к несущей плите 8, Перемещение подвижной рамки 13 по оси 2 передается ей от шагового .двигателя б, установленного на несущей плите 8 при помсици пары винт-гайка 7, и Еллчага 15, выполненного в виде вилки и закрепленного в центрах 16, которые делят плечи рычага 15 в отношении 1:1.. Ограничитель 17 колебаний, выполненный в виде рычага, поджат пружиной 18 к направляющим 14 и закреплен на оси 19 на несу щей плите 8.
Упругая направляющая обеспечивает связь подвижной рамки .13 с несущей плитой 8, состоящей из мембран 20, укрепленных по наружному диаметру в корпусе 21 при помощи набора шайб 22 и гайки 23, связанных по внутреннему диаметру с помощью колонки 24, набора шайб 25 и гайки 26.
Устройство работает следующим образом.
После предварительной ориентаци проверяемой пластины относительно зондов (вручную оператором) в режиме Автомат срабатывает механиз перемещения зондовой карты по оси 2, который осуществляет контактирование зондов с контактными площадками .проверяекых структур. Блок управления устройством подает сигнал шаговому двигателю 6 привода зондовой карты 12 по оси Z. Вращательное движение ротора шагового двигателя 6 преобразуется через пару винт-гайка 7, соединенную с рычагом 15, вращающимся в центрах 16, которые делят его плечи в отношении 1:1, в поступательное движение рамки 13 с зондовой картой 12, укрепленной на упругих направляющи 14. Рычаг 15 ограничивает колебания рамки 13 вокруг оси 27 и передает движение от шагового двигателя 6 на зондовую карту. 12. Ограничитель 17 колебаний, выполненный в виде рычага, ось 19 вращения которого устанс лена на несущей плите 8 зондового устройства, и связы
вающий направляющие 14, поджат пру жйной 18 к колонкам, запрессованным в рамку 13, и ограничивает ее колебания вокруг оси 28 Колебания рамки 13 вокруг оси Z и возможность перемещения ее по осям X, У ограничены направляющими 14, неподвижно закрепленными на не сущей плите 8.
Таким образом, рамка 13, устаноленная на упругих направляющих 14 и лишенная пяти степеней свободы, имеет возможность перемещаться только вдоль вертикальной оси 2, параллельно самой себе,
Рамка 13 перемещается до соприкосновения зондов и датчика края пластины, установленного на одном с ними уровне, с контактными площадками проверяемых структур . При размыкании датчика края пластины сигнал поступает на устройство управления механизмом перемещения зондовой карты по оси Z / и рамка 13 с зондами равномерно опускается на заранее заданную величину определяющую давление зондов на контактные площадки проверяемых структур,, Плоско-параллельное перемещение рамкк 13 с зондами обеспечивает равномерное нарастание давления на контактные площадки проверяемых структур всех зондов независимо от их расположения на зондовой карте от нулевой до заданной величины с учетом профиля пластины, Создание строго определенного и равномерного давления необходимо для продавливания окисной пленки на поверхности контактной площадки проверяемой структуры и для осуществления электрического контакта.непосредственно с материалом площадки без повреждения
кристалла и контактной площадки структуры. Скисная пленка на поверх ности проверяемой структуры может значительно изменить переходное сопротивление цепи зонд-контактная площадка, что вносит недопустимые погрешности при измерении параметров полупроводниковых приборов.
Блок управлеиия зондовым устройством (не показан) и один шаговый
0 привод механизма перемещения зондовой карты обеспечивает заданное давление зондов на контактные площадки проверяемых структур.
По завершении контактирования
5 проводится процесс измерения параметров структуры. Команды Брак или Годен являются сигналом для подъема зондовой карты по вертикальной оси Z и для перемещения пластины со структурами на задан0ный шаг для контроля следукмцей структуры.
После обхода и контроля всех структур на пластине по сигналу
5 блока управления негодные структуры маркируют. После маркировки манипулятор доставляет пластину в зону загрузки, где оператор снимает ее с предметного стола и загружает новую. Цикл повторяется.
0
Для проверки электрических параметров полупроводниковых и магнитных структур, например запоминакщих устройств на цилиндрических магнитных, доменах , требуется создание
5 однородного магнитного поля в 3OHte контактирования. Это достигается путем установки двух электромагнитов , в зоне между которыми и проводится контактирование, причем преаг
0 метный стол выполняется, из немагнитного материала, например, ситалЛа..-..
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для контроля полупроводниковых структур | 1981 |
|
SU1001238A1 |
| Устройство для контроля полупроводниковых узлов | 1981 |
|
SU960744A1 |
| Устройство для контроля | 1978 |
|
SU746967A1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ПОЛУПРОВОДНИКОВЫХ СТРУКТУР | 1990 |
|
RU2023327C1 |
| Устройство для визуального контроля микроструктур на полупроводниковой пластине | 1975 |
|
SU924778A1 |
| Способ разбраковки по электрическим параметрам структур стабилитронов на пластине | 1991 |
|
SU1820425A1 |
| СПОСОБ ПРОВОЛОЧНОГО МОНТАЖА ПОЛУПРОВОДНИКОВОГО КРИСТАЛЛА ИНТЕГРАЛЬНОЙ МИКРОСХЕМЫ И УСТАНОВКА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2024 |
|
RU2835230C1 |
| Установка для микросварки проволочных проводников | 2021 |
|
RU2759103C1 |
| Устройство для измерения электрических параметров интегральных схем | 1980 |
|
SU906045A1 |
| Устройство для контроля микросхем | 1980 |
|
SU866583A1 |
УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ЭЛЕКТРИЧЕСКИХ ПАРАМЕТРОВ ПОЛУПРОВОДНИКОВЫХ И МАГНИТНЫХ СТРУКТУР НА ПЛАСТИНЕ, содержащее оптическую отстему, манипулятор в виде предметного стола с механизмом шагового перемещения по взаимно перпандикулярным осям, механизм перемещения рамки с зондами, соединенный с приводом, отличающееся тем, что, с целью повышения качества контроля, механизм перемещения рамки с зондами снабжен рычагом и ргпгчажным ограничителем колебаний, установленным перпендикулярно рычагу, причем рамка с зондами уста.новлена на рычаге с возможностью вэаимод ействия с рычажным ограничителем колебаний.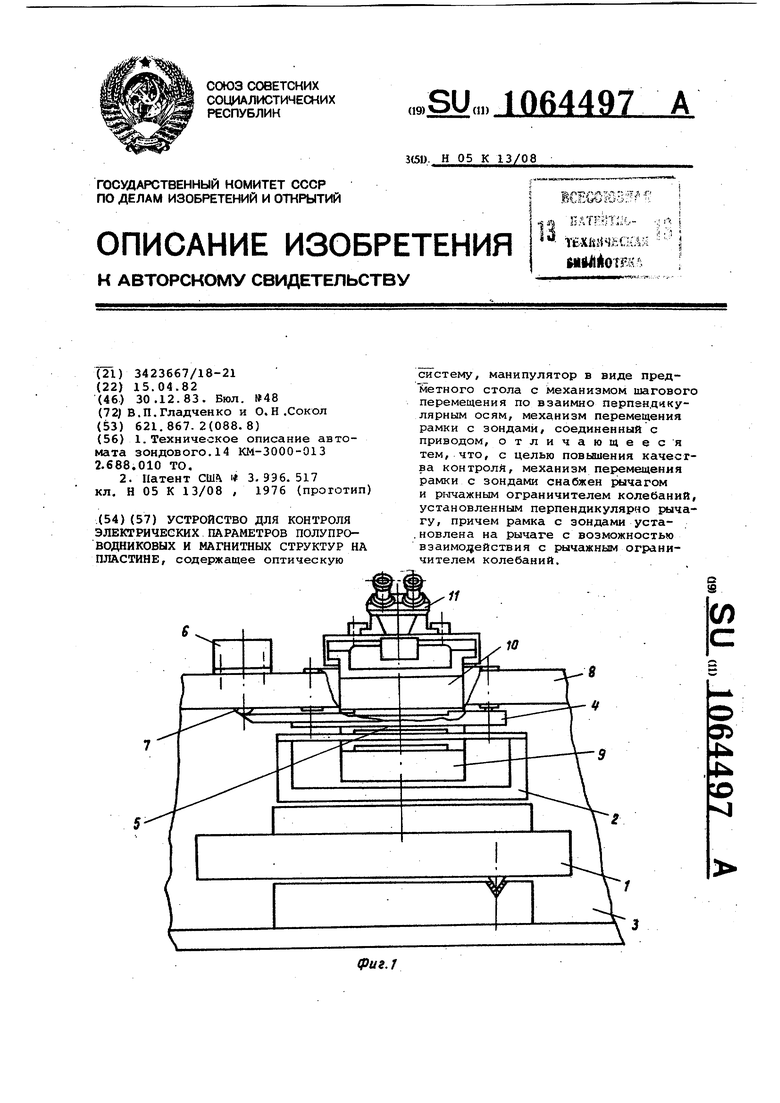
23
24
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Техническое описание автомата ЗОНДОВОГ0.14 КМ-3000-013 2.688.010 ТО, 2 | |||
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| МАШИНА ДЛЯ НАКЛЕИВАНИЯ ЭТИКЕТОВ НА БУТЫЛКИ | 1925 |
|
SU517A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
