fe
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для контроля металлизированных переходов печатной платы | 1985 |
|
SU1308955A1 |
| Устройство для управления сортировкой штучных изделий | 1982 |
|
SU1375535A1 |
| Устройство для сварки давлением | 1987 |
|
SU1459864A1 |
| Устройство для контроля полупроводниковых узлов | 1981 |
|
SU960744A1 |
| Устройство для монтажа проволочных перемычек | 1986 |
|
SU1430214A1 |
| Автомат для контроля и сортировки деталей и устройство управления автоматом для контроля и сортировки деталей | 1983 |
|
SU1135500A1 |
| Устройство для диагностики неисправностей логических блоков | 1987 |
|
SU1520548A1 |
| Автомат для контроля и сортировки деталей | 1986 |
|
SU1377160A1 |
| Устройство для контроля обрыва сварных соединений | 1986 |
|
SU1335939A1 |
| Устройство для контроля | 1985 |
|
SU1295421A1 |
Изобретение относится к измерительной технике и может быть использовано для контроля геометрических параметров полупроводниковых пластин. Цель изобретения - повышение точности, расширение диапазона измерений и обеспечение неразрушающих измерений при контроле толщины. Измеритель содержит датчик касания, привод датчика касания, генератор тактовых импульсов, коммутатор сигналов калибровки, счетчик сигналов калибровки, схемы ИЛИ, коммутатор сигналов измерения, счетчик сигналов измерения, счетчик управления приводом, блок управления приводом. 1 ил.
Изобретение относится к области измерительной техники и может найти примене- ние при контроле геометрических параметров полупроводниковых пластин.
Известно устройство для контроля геометрических параметров полупроводниковых пластин, содержащее предметный стол с базовыми опорами, измеритель и тарированный гравитационныйтолкательстравер- сой, причем базовые опоры выполнены в виде датчиков касания, подключенных к анализатору базирования, выход которого подключен к управляющему входу узла коммутации, информационный вход последнего подключен к выходу электронного преобразователя, входом соединенного с выходом измерителя.
Наиболее близким к настоящему устройству является устройство для контроля
геометрических параметров полупроводниковых пластин, содержащее предметный стол с базовыми опорами, измеритель и тарированный гравитационный толкатель с траверсой, базовые опоры, выполненные в виде датчиков касания, анализатор базирования, узел коммутации, электронный преобразователь, электронный датчик, узлы коммутации, узел управления, формирователи команд разбраковки, узлы памяти, сумматор.
Недостатками известных устройств являются низкая точность и узкий диапазон измерения, обусловленные точностью и диапазоном измерения датчика положения (измерителя), в качестве которого применяются индуктивные, емкостные, пневматические преобразователи, а также высокая
VJ ON CJ 00 VJ
CJ
вероятность повреждения контролируемой пластины датчиком касания.
Целью изобретения являются повышение точности, расширение диапазона измерений и обеспечение неразрушающих измерений при контроле толщины пластин.
Поставленная цель достигается тем, что устройство, содержащее датчик касания, первый коммутатор, второй коммутатор, формирователь сигналов сортировки, снаб- же но шаговым приводом датчика касания, соединенным с ним блоком управления приводом, счетчиком сигналов калибровки, счетчиком сигналов измерения, счетчиком управления приводом, двумя схемами ИЛИ и генератором тактовых импульсов, выход генератора соединен с информационными входами первого и второго коммутаторов, первые управляющие входы которых соединены с датчиком касания, вторые управляю- щие входы коммутаторов соединены с выходом переполнения счетчика управления приводом, первый выход первого коммутатора соединен со входами сброса счетчика управления приводом и счетчика сигналов калибровки, информационный выход которого соединен с установочным входом счетчика сигналов измерения, второй выход первого коммутатора соединен с суммирующим входом счетчика сигналов ка- либровки и со вторым входом второй схемы ИЛИ, выход которой соединен с суммирующим входом счетчика управления приводом, третий выход первого коммутатора соединен со вторым выходом первой схемы ИЛИ, выход которой соединен с вычитающим входом счетчика управления приводом, первый вход первой схемы ИЛИ соединен с третьим выходом второго коммутатора, первый вход второй схемы ИЛИ - с вычитающим входом счетчика сигналов измерения и вторым выходом второго коммутатора, первый выход которого соединен с управляющим входом счетчика сигналов измерения, информационный выход кото- рого связан с информационным входом формирователя сигналов сортировки, управляющий вход которого объединен со вторым входом второго коммутатора и соединен с выходом переполнения счетчика уп- равления приводом, информационный выход которого подключен ко входу блока управления приводом, выход которого соединен со входом шагового привода, кинематически связанного с датчиком касания.
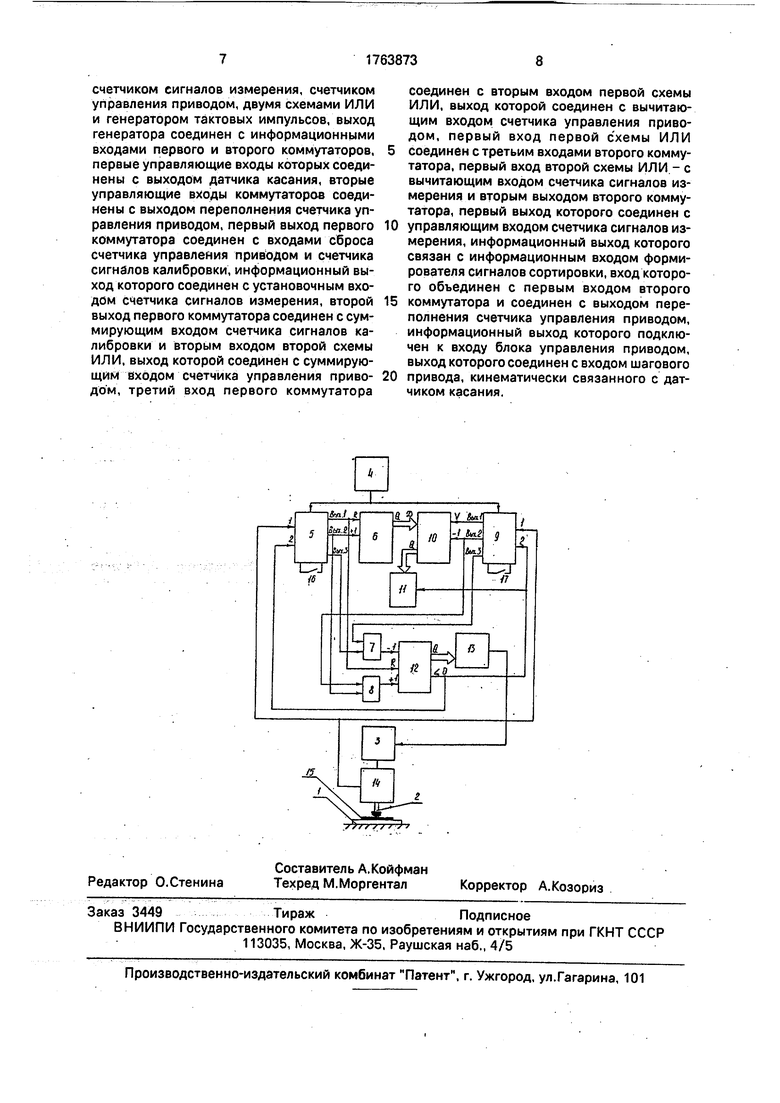
На фиг 1 представлена функциональная схема устройства.
Устройство содержит предметный стол
1,датчик касания 14 с контактным зондом
2,шаговый привод 3, генератор тактовых
импульсов 4, первый коммутатор 5 с ключом КАЛИБРОВКА 16, счетчик сигналов калибровки 6, первую схему ИЛИ 7, вторую схему ИЛИ 8, второй коммутатор 9 с ключом ИЗМЕРЕНИЕ 17, счетчик сигналов измерения 10, формирователь сигналов сортировки 11, счетчик управления приводом 12, блок управления приводом 13.
Устройство работает следующим образом. В исходном состоянии контактный зонд 2 датчика касания 14 находится в крайнем верхнем положении. Контролируемая пластина 15 на предметном столе 1 отсутствует. Генератор тактовых импульсов 4 непрерывно вырабатывает прямоугольные тактовые импульсы При замыкании ключа КАЛИБРОВКА 16 первый коммутатор 5 формирует на первом своем выходе отрицательный перепад напряжения, приводящий к обнулению по входам R счетчиков сигналов калибровки 6 и управления приводом 12. Одновременно через второй выход первого коммутатора 5 с его информационного входа начинают следовать тактовые импульсы, которые поступают на счетный суммирующий вход +1 счетчика сигналов калибровки 6 и через вторую схему ИЛИ - 8 - на счетный суммирующий вход +1 счетчика управления приводом 12 Шаговый привод 3, управляемый блоком управления приводом 13, дискретно с постоянным шагом перемещает контактный зонд 2 датчика касания 14 в сторону предметного стола 1, причем каждый шаг сопровождается прибавлением единицы счета в счетчике сигналов калибровки 6. В момент касания контактным зондом 2 поверхности предметного стола 1 датчик касания 14 формирует импульс, который, поступив на первый управляющий вход первого коммутатора 5, вызывает переключение тактовых импульсов со второго выхода первого коммутатора 5 на третий. Поступление этих импульсов через первую схему ИЛИ 7 на счетный вычитающий вход -1 счетчика управления приводом 12 сопровождается вычитанием единиц счета из числа, содержащегося в нем В результате этого порядок следования импульсов, поступающих на вход блока управления приводом 13, меняется на обратный, и шаговый привод 3 движется в противоположную сторону, удаляя контактный зонд 2 от предметного стола 1 В счетчике сигналов калибровки б, на вход которого импульсы уже не поступают, сохраняется значение калибровочного числа, численно равного числу шагов перемещения контактного зонда 2 из исходного положения до касания им поверхности предметного стола 1 В момент обнуления счетчика управления приводом
12, соответствующего возврату контактного зонда 2 в исходное положение, с выхода переполнения 0 счетчика управления при йодом 12 на второй управляющий вход первого коммутатора 5 поступает кратковременный импульс, переводящий первый коммутатор 5 в исходное состояние, при котором прекращается прохождение через него тактовых импульсов. Шаговый привод 3 тормозится.
Для измерения толщины контролируемая пластина 15 помещается на предметный стол Т. Замыкается ключ ИЗМЕРЕНИЕ 17 второго коммутатора 9. При этом торой коммутатор 9 формирует на первом своем выходе отрицательный перепад напряжения, который, поступая на вход записи V счетчика сигналов измерения 10, вызывает перезапись калибровочного числа из счетчика сигналов калибровки б в счетчик сигналов измерения 10 по его установочному входу D. Одновременно через второй выход второго коммутатора 9 с его информационного входа начинают следовать тактовые импульсы, которые поступают на счетный вычитающий вход -1 счетчика сигналов измерения 10 и через вторую схему ИЛИ - 8 - на счетный суммирующий вход +1 счетчика управления приводом 12. Шаговый привод 3, управляемый блоком управления приводом 13, дискретно с постоянным шагом перемещает контактный зонд 2 датчика касания 14 в сторону предметного стола 1, причем каждый шаг сопровождается вычитанием единицы счета из калибровочного числа, записанного в счетчике сигналов измерения 10 и прибавлением единицы счета в счетчике управления приводом 12. В момент касания контактным зондом 2 поверхности контролируемой пластины 15 датчик касания 14 формирует импульс, который, поступив на первый управляющий вход второго коммутатора 9, вызывает переключение тактовых импульсов со второго выхода второго коммутатор а 9 на третий. Поступление этих импульсов через первую схему ИЛИ 7 на счетный вычитающий вход -1 счетчика управления приводом 12 сопровождается вычитанием единиц счета из числа, содержащегося в нем. В результате этого порядок следования импульсов, поступающих на вход блока управления приводом 13, меняется на обратный, и шаговый привод 3 движется в противоположную сторону, удаляя контактный зонд 2 от предметного стола 1. В счетчике сигналов измерения 10, на вход которого импульсы уже не поступают, сохраняется число результата измерения, численно равное разности между калибровочным числом и
числом шагов, совершенных контактным зондом 2 из исходного положения до касания поверхности контролируемой пластины 15. В момент обнуления счетчика управления приводом 12, соответствующий возврату контактного зонда 2 в исходное положение, с выхода переполнения О счетчика управления приводом 12 на второй управляющий вход второго коммутатора 9
0 поступает кратковременный импульс, переводящий второй коммутатор 9 в исходное состояние, при котором прекращается прохождение через него тактовых импульсов. Шаговый привод 3 тормозится, Импульс с
5 выхода переполнения 0 счетчика управления приводом 12 поступает, кроме того, на управляющий вход формирователя сигналов сортировки 11,который формирует в соответствии с кодом числа результата из0 мерения, поступающим на его информационный вход с информационного выхода Q счетчика сигналов измерения 10, сигнала принадлежности контролируемой пластины 15 той или иной группе сортировки. В даль5 нейшем при повторных замыканиях ключа ИЗМЕРЕНИЕ 17 второго коммутатора 9 работа устройства протекает идентично.
Устройство обеспечивает следующие преимущества:
0 абсолютная основная погрешность измерения не может превышать величины единичного шага перемещения контактного зонда датчика касания, т.е. цены деления, величина этого шага задается выбором типа
5 шагового привода и может составлять 1 мкм и менее;
диапазон измерения определяется емкостью счетчиков сигналов измерения и калибровки, при этом расширение диапазона
0 измерения не приводит к накоплению погрешности измерения;
шаговый привод обеспечивает практически безинерционное торможение контактного зонда при касании последним
5 поверхности контролируемой пластины, что обеспечивает неразрушающий характер контроля .
Формула изобретения Устройство для измерения геометриче0 ских параметров полупроводниковых пластин, содержащее датчик касания, первый , коммутатор, второй коммутатор, формирователь сигналов сортировки, отличаю- щ е е с я тем, что, с целью повышения точ5 ности, расширения диапазона измерений и обеспечения неразрушающих измерений при контроле толщины пластин, оно снабжено шаговым приводом датчика касания, соединенным с ним блоком управления приводом, счетчиком сигналов калибровки,
счетчиком сигналов измерения, счетчиком управления приводом, двумя схемами ИЛИ и генератором тактовых импульсов, выход генератора соединен с информационными входами первого и второго коммутаторов, первые управляющие входы которых соединены с выходом датчика касания, вторые управляющие входы коммутаторов соединены с выходом переполнения счетчика управления приводом, первый выход первого коммутатора соединен с входами сброса счетчика управления приводом и счетчика сигналов калибровки, информационный выход которого соединен с установочным входом счетчика сигналов измерения, второй выход первого коммутатора соединен с суммирующим входом счетчика сигналов калибровки и вторым входом второй схемы ИЛИ. выход которой соединен с суммирующим входом счетчика управления приво- дом, третий вход первого коммутатора
соединен с вторым входом первой схемы ИЛИ, выход которой соединен с вычитающим входом счетчика управления приводом, первый вход первой схемы ИЛИ соединен с третьим входами второго коммутатора, первый вход второй схемы ИЛИ - с вычитающим входом счетчика сигналов измерения и вторым выходом второго коммутатора, первый выход которого соединен с управляющим входом счетчика сигналов измерения, информационный выход которого связан с информационным входом формирователя сигналов сортировки, вход которого объединен с первым входом второго коммутатора и соединен с выходом переполнения счетчика управления приводом, информационный выход которого подключен к входу блока управления приводом, выход которого соединен с входом шагового привода, кинематически связанного с датчиком касания.
| Устройство для контроля изгиба полупроводниковых пластин | 1981 |
|
SU1111023A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Счетная таблица | 1919 |
|
SU104A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
