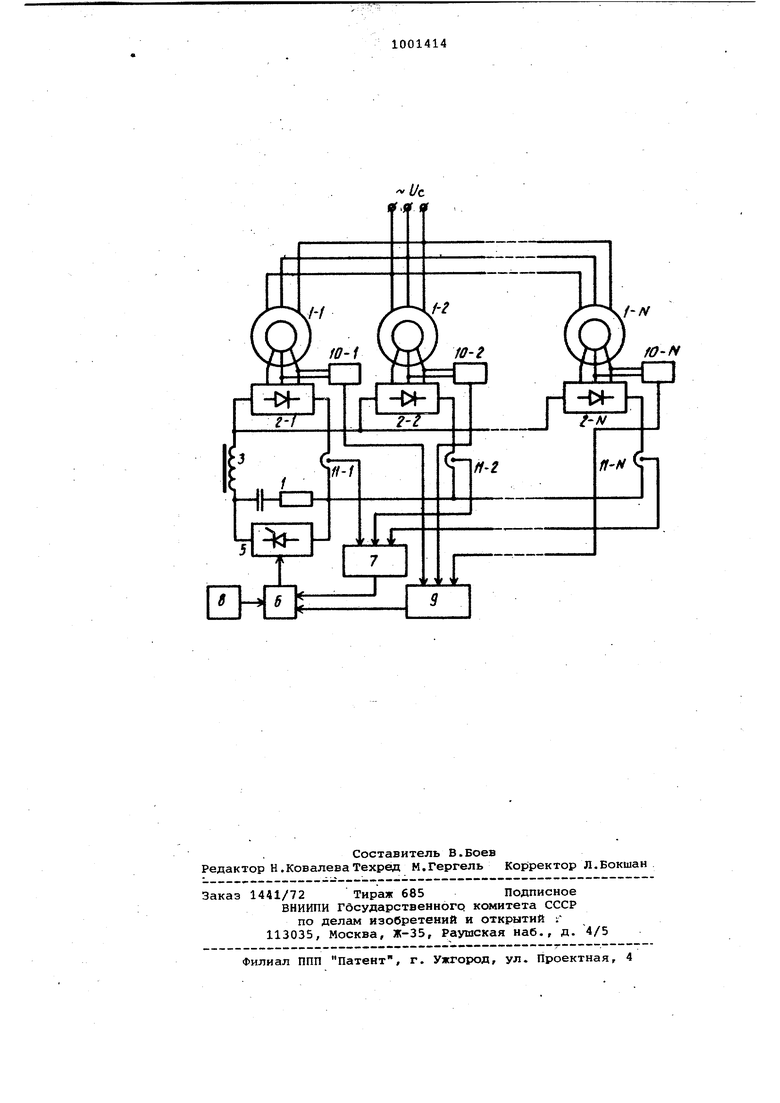
Цель изобретения - повышение точности регулирования скорости электродвигателей. Поставленная цель достигается тем, что в многодвигательный асинхронный- электропривод дополнительно введены датчики скорости каждого электродвигателя и блок выделения ск рости нагруженного электродвигателя входы которых соединены с датчиками скорости электродвигателей, а выход соединен с третьим входом блока управления импульсным регулятором тока На чертеже показана блок-схема предлагаемого электропривода. Электропривод содержит асинхронные электродвигатели 1-1,1-.2 ,. .. ,1-N в цепь роторов которых подключены вы прямители 2-1,2-2,...,2-N, выходы которых включены между собой параллельно и через дроссель 3 подключены к последовательно соединенным ре зистору и конденсатору 4, параллель но которым подключен импульсный ре гулятор 5 тока. К входам блоков 6 управления импульсным регулятором 5 :Тока подключены выходы блока 7 выделения тока нагруженного электродвигателя, блок 8 задания скорости и блок 9 выделения скорости нагруженного электродвигателя, входы которого подключены к датчикам 10-1, 10-2,,.., 10-N скорости электродвигателей . К входам блока 7 выделения тока нагруженного электродвигателя подключены датчики 11-1,11-2 .. . тока обмотки работы электродвигателей 1-1,1-2, ...,1-N. Устройство работает следующим образом.. Для получения заданной скорости в блок б управления импульсным регулятором 5 тока подается задающий сигнал, величина которого пропорциональна заданной скорости. В блоке 6 происходит .сравнение задающего сиг нала V-j с сигналом обратной связи п скорости электродвигателей 1-1,12,...1-N, поступающего с выхода бло ка 9 выделения скорости нагруженног электродвигателя, образуя внешний контур регулирования многодвигательным электроприводом. В начальны момент пуска скорость электродвигателей 1-1, 1-2,...,1-N равна нулю, соответственно и выходной сигнал с блока 9 равен нулю, и поэтому в бло ке б управления происходит сравнение задающего сигнала V непосредственно с сигналом обратной связи по току Ует .по У 3°1 ° блока 7 выделения тока наиболее загруженного электродвигателя. Обратная связь ho току образует внутренний контур регулирования скорости. Разность напряжений (V -VCT) обеспечивает запуск привЗДа по заданному закону регулирования тока, реализованному в блоке б. Причем регулирование как в динамике так ив статике ведется пс выпрямленному току наиболее загруженного электродвигателя. По мере увеличения.скорости электропривода появляются сигналы на выходе датчиков 10-1, 10-2 ,. .. , скорости Электродвигателей 1-1,1-2,...,1-N, при сравнении которых в блоке 9 выделяется сигнал, соответствующий скорости наиболее нагруженного электродвигателя. Этот сигнал поступает в блок 6, где производится формирование сигнала, обеспечивающего задан-, ное изменение скорости в динамике, например при пуске, и формирование жесткой механической характеристики в статике при воздействии на импульсный регулятор 5 тока. Таким образом, в предлагаемом устройстве происходит с достаточной точностью определение скорости наиболее загруженного электродвигателя вне зависимости от различия их параметров , чем достигается точность установки и поддержания заданной скорости электродвигателей в электроприводе . Формула изобретения I Многодвигательный асинхронный электропривод. Содержащий асинхронные электродвигатели, выпрямители, вход каждого из которых подключен к обмотке ротора соответствующего электродвигателя, а выходы выпрямителей соединены параллельно и через дроссель подключены к импульсному регулятору тока, параллельно которому включены последовательно соединенные резистор и конденсатор,, блок задания скорости, соединенный с первым входом блока управления импульсным регулятором тока, второй вход которого соединен с выходом блока выделения тока нагруженного электродвигателя, подключенного входами к соответствующим датчикам токов обмоток роторов электродвигателей,отличающий с я тем, что, с целью повышения точности регулирования скорости электродвигателей, в него введены датчики скорости кайсдого электродвигателя и блок выделения скорости нагруженного электродвигателя , входы которого соединены с датчиками скорости электродвигателей, а выход соединен с третьим входом блока управления импульсным регулятором тока. Источники информации, принятые во внимание при экспертизе 1.Сб. Электротехническая промышленность. Электропривод. М., Информэлектро, 1976, вып. 2, d.12-13. 2.Авторское свидетельство СССР 699642, кл. Н 02 Р 5/50, 1977.
fO-N
| название | год | авторы | номер документа |
|---|---|---|---|
| Многодвигательный асинхронный электропривод | 1977 |
|
SU699642A1 |
| Многодвигательный частотно-регулируемый электропривод | 1988 |
|
SU1598256A1 |
| Многодвигательный электропривод | 1980 |
|
SU983961A1 |
| МНОГОДВИГАТЕЛЬНЫЙ ЧАСТОТНО-РЕГУЛИРУЕМЫЙ ЭЛЕКТРОПРИВОД | 2006 |
|
RU2326488C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ МНОГОДВИГАТЕЛЬНЫМИ ЭЛЕКТРОПРИВОДАМИ ПОСТОЯННОГО ТОКА | 2016 |
|
RU2624266C1 |
| Многодвигательный электропривод | 1983 |
|
SU1115192A1 |
| Многодвигательный электропривод переменного тока | 1984 |
|
SU1233255A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ МНОГОДВИГАТЕЛЬНЫМИ ЭЛЕКТРОПРИВОДАМИ ПОСТОЯННОГО ТОКА | 2013 |
|
RU2529923C1 |
| Устройство для управления частотно-регулируемым многодвигательным электроприводом | 1984 |
|
SU1252906A1 |
| Устройство для регулирования частоты статического преобразователя многодвигательного асинхронного тягового электропривода | 1979 |
|
SU875571A1 |