1
Изобретение относится к весоизмерительной технике.
Известны устройства для взвешивания, содержащие рычажную систему, воспринимающую давление грузоприемного элемента, датчик веса в виде пневматического элемента и элементы пневмоавтоматики, образующие систему обработки и регистрации сигнала 1.
Однако эти устройства не обеспечивают требуемую точность, так как суммирование усилий производится на рычагах.
Наиболее близким к изобретению по те иической сущности является весоизмерительное устройство, содержащее грузоприемный ковш, кинематически связанный с рычажным пневмопреобразователем, имеющим элементы
силовой компенсации с
узлом соплозаслонка С 2.
Недостатками известного устройства являются его сложность и неудовлетворительная надежность, обусловленная нестабильностью работы в случае использования удлиненных грузоприемных ковшей.
Цель изобретения - упрощение и повышение надежности устройства.
Поставленная цель достигается тем, что в устройство введен суммирующий пневматический преобразователь с догружающим силовым элементом, причем вход догружающего силового элемента подключен к выходу рычажного пнев5 матического преобразователя.
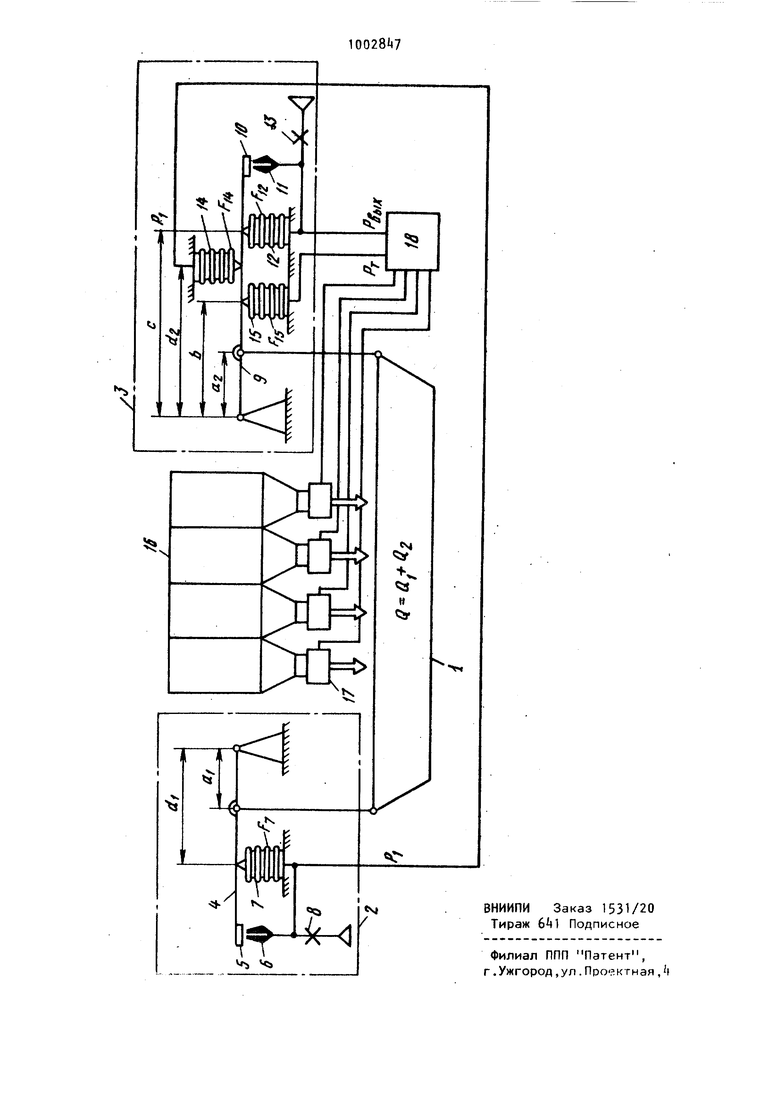
На чертеже показана схема весоизмерительного устройства.
Грузоподъемный ковш 1 опирается на два пневматических преобразовате20ля 2 и 3, выполненных по принципу комг енсации усилий.
Преобразователь 2 выполнен в виде рычага , один конец которого закреп31002847лен с возможностью поворота в вертикальной плоскости, а второй снабжен заслонкой 5 прикрывающий сопло 6 и опирается на элемент 7 силовой компенсации, например сильфон. Питание преобразователя сжатым воздухом осуществляется через дроссель 8, выходная магистраль которого соединена с соплом 6 и элементом 7 силовой компенсации. Преобразователь 3 содержит рычаг 9с заслонкой 10, сопло 11 и элемент 12 силовой компенсации. Питание преобразователя 3 осуществляется через дроссель 13, выход которого соединен с соплом 11 и элементом 12 силовой компенсации. Преобразователь 3 выполнен суммирующим, т.е. снабжен догружающим его силовым элементом 1, соединенным с выходом преобразователя 2. Кроме того, преобразователь 3 выполнен с раздельной компенсацией в.еса тары и нетто, что обеспечивается силовым элементом 15. Загрузка грузоприемного ковша 1 осуществляется из бункеров 16, имеющих исполнительные механизмы 17. Режим загрузки осуществляется по заданной программе автоматически с пульта 18, с использованием в системе управления выходного сигнала Устройство работает следующим образом. Перед циклом взвешивания осуществ ляется компенсация веса тары за счет задания определенного давления P-j-, подаваемого к силовому элементу 15 либо автоматическое взвешивание тары за счет соединения на некоторое время сопла 11 с силовым элементом 15 при элементе 12, сообщенном с атмосферой. При взвешивании тары на выходе преобразователя 2 формируется давление Р, , компенсирующее тарную нагрузку на преобразователь 2, T-i1.1 тарная нагрузка (часть веса ковша 1), приходящаяся на рычаг Ц; а - расстояние от оси поворота рычага 4 до точки приложения нагрузки; F. - эффективная площадь элемен та 7; d. - расстояние от оси поворота рычага и до оси элемента 7 ме ра гд мо хо то 15 15 те Это давление, заведенное в элет I, создает ма рычаге 9 преобователя 3 момент М м - г , 14 d 2 FA - эффективная площадь элемента U; drt - расстояние от оси поворота рычага 9 до оси элемента . Кроме того, на рычаг 9 действует ент от тарной нагрузки приящейся на преобразователь 3Эти моменты компенсируются моменМ, создаваемым силовым элементом при действии давления РТ S,.) Эффективная площадь элемента 15; b - расстояние от оси поворота рычага 9 до оси элемента 15; а - расстояние от оси поворота рычага 9 До точки приложения нагрузки. При нагружении ковша 1 вес Q маиала разлагается на составляющие Q и 0,, действующие соответственно на преобразователи 2 и 3. В результате давление на вь1ходе преобразователя 2 возрастает на величину Р, р - PHI - Так как при взвешивании полезного груза в элемент 15 заведено давление Ру, а сопло 11 соединено с силовым элементом IZ , давление Paj,|y в нем пропорционально только полезной нагрузке и определяется соотношениемр -Q F-, i1 1i Эффективная площадь элемента 12; С - расстояние от оси поворота рычага 9 до оси элемента 12.. Чтобы обеспечить независимость поазаний весоизмерительного устройста от положения точки нагружения необходимо, исходя из равенства по следнего, обеспечить равенство: dl 2 F-7-da Практически возможно принять . В,4 F тогда равенст сохраняется. Формула изобретения Весоизмерительное устройство, с держащее грузоприемный ковш, кинематически связанный с рычажным пне матическим преобразователем, имеющ элементы силовой компенсации с узлом сопло-заслонка, отличающееся тем, что, с целью его упрощения и повышения- надежности, в него введен суммирующий пневматический преобразователь с догружающим силовым элементом, причем вход догружающего силового элемента подключен к выходу рычажного пневматического, преобразователя. Источники информации принятые во внимание при экспертизе 1.Авторское свидетельство СССР № 39706, кл. G 01 G 19/10, 1972. 2.Авторское свидетельство СССР № 510652, кл. G 01 G 13/1, 1373 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для взвешивания длинномерных грузов | 1981 |
|
SU1328683A1 |
| Весовой порционный дозатор с устройством управления | 1980 |
|
SU1237914A1 |
| Весоизмерительное устройство | 1976 |
|
SU653516A1 |
| ВЗВЕШИВАЮЩЕЕ УСТРОЙСТВО | 1990 |
|
RU2008627C1 |
| Устройство для автоматического весового дозирования жидкого металла | 1979 |
|
SU767548A1 |
| Весы с устройством поверки | 1981 |
|
SU1291826A1 |
| Пневматический весовой дозатор непрерывного действия | 1984 |
|
SU1185104A1 |
| ВЕСОВОЙ ДОЗАТОР ПОРОШКА | 2008 |
|
RU2383872C1 |
| Устройство для многокомпонентного весового дозирования | 1983 |
|
SU1137331A1 |
| ПОРТАТИВНОЕ УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ВЕСА ТРАНСПОРТНЫХ СРЕДСТВ | 2007 |
|
RU2345330C1 |