Изобретение относится к автоматическому управлению и. может быть применено при автоматизации агрегатных многопроцессных гальванических линий,
Известно устройство для программного управления автбматйческими линия-ми гальванопокрытий,содержащее программно-анализирующие устройства по числу программ,блок управления приводами ,перфоратор,считывающие устройства опроса,рабочее считывающее устройство, перфоленту оперативной памяти и приводы перфоленты,блоки формирования команд по числу автооператоров и блок индикации.
В данном устройстве сигнал разрешения на запуск подвески по той или иной программе поступает в том случае, если в результате опроса установлено, что при выполнении данной программы исключено опускание данного контейнера в занятую другой подвеской ванну 1.
Однако в данном устройстве отсутствует блок, выдакадий информацию о занятости рабочих позиций в процессе выполнения программы, что вызывает опасн ость аварийного опускания подвески в одну из этих позиций при случайном сбое программы.
Известно устройство для централизованного программного управления автооператорами, содержащее диспетчерский пульт, связанный через первый блок связи и блок управления с запоминающим узлом, а через первый переключатель команд (для задания технологического процесса) с блоком управления автооператорами, второй
10 переключатель команд для задания основной ванны, связанный сблоком управления автооператорами и регистром для счета времени основных ванн, задающий генератор, импульсы с которо15го поступают на регистр для счета времени основных ванн, блок управления автооператорами, соединенный с блоком управления и регистром для счета времени основных ванн и второй
20 блок связи с автооператорами, связанный с блоком управления автооператорами и запоминающим узлом 2.
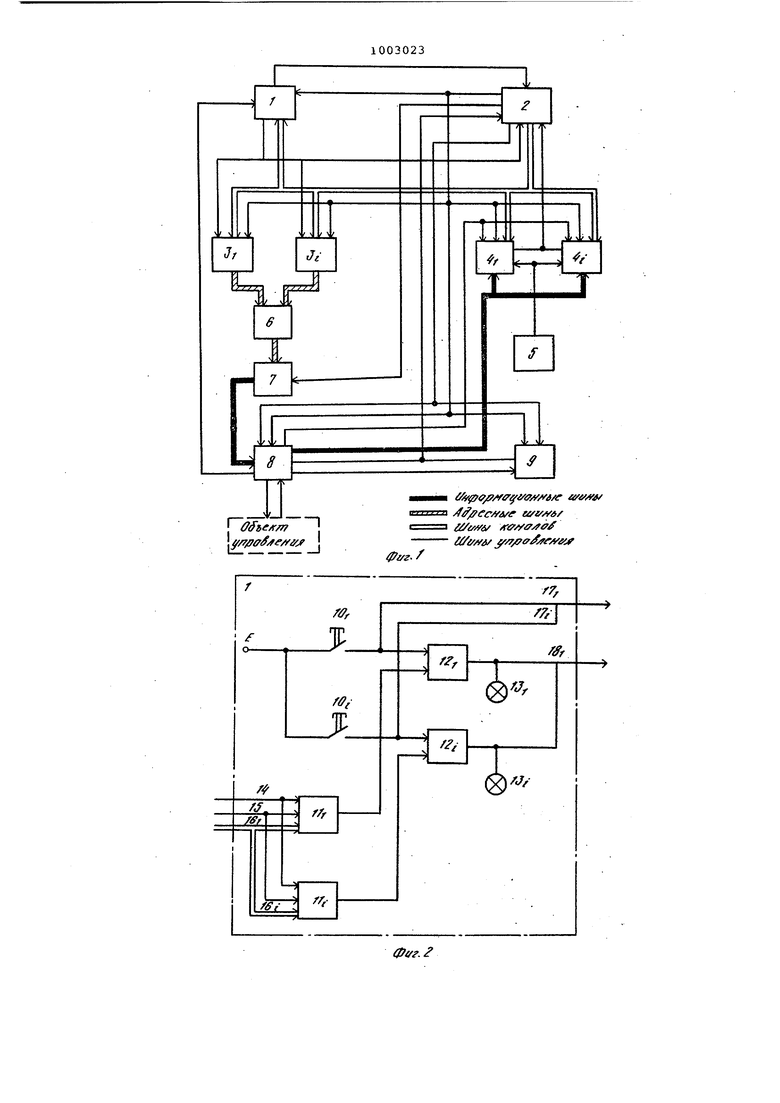
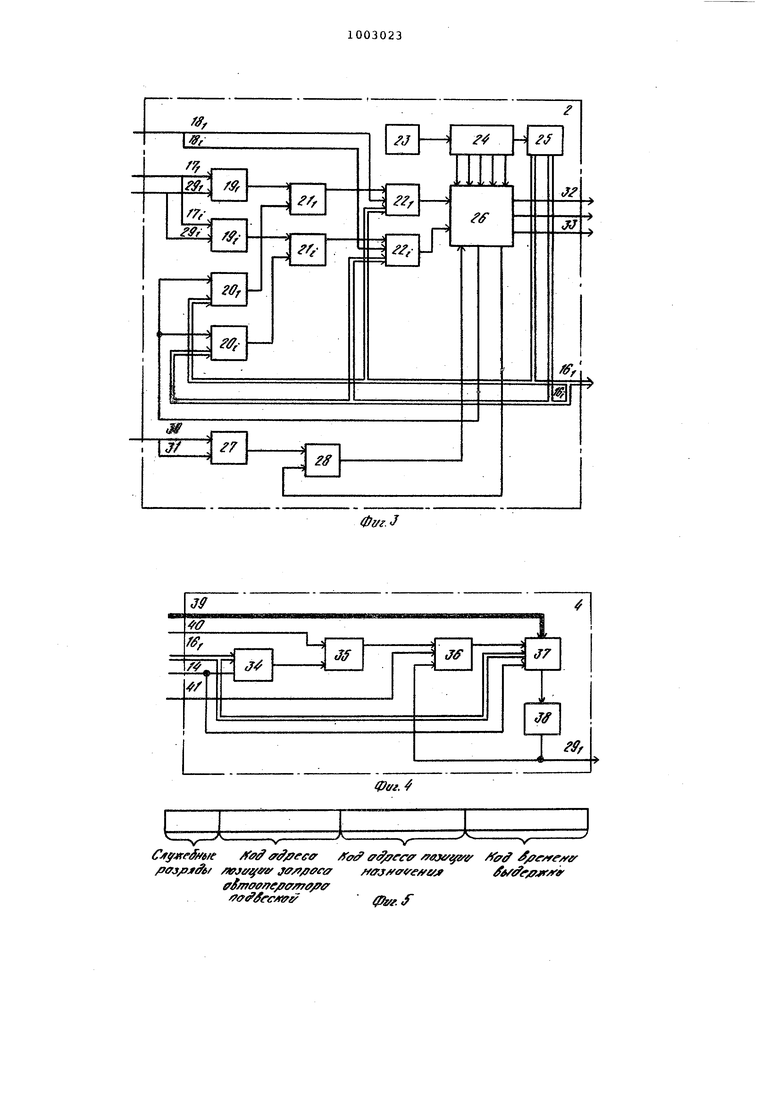
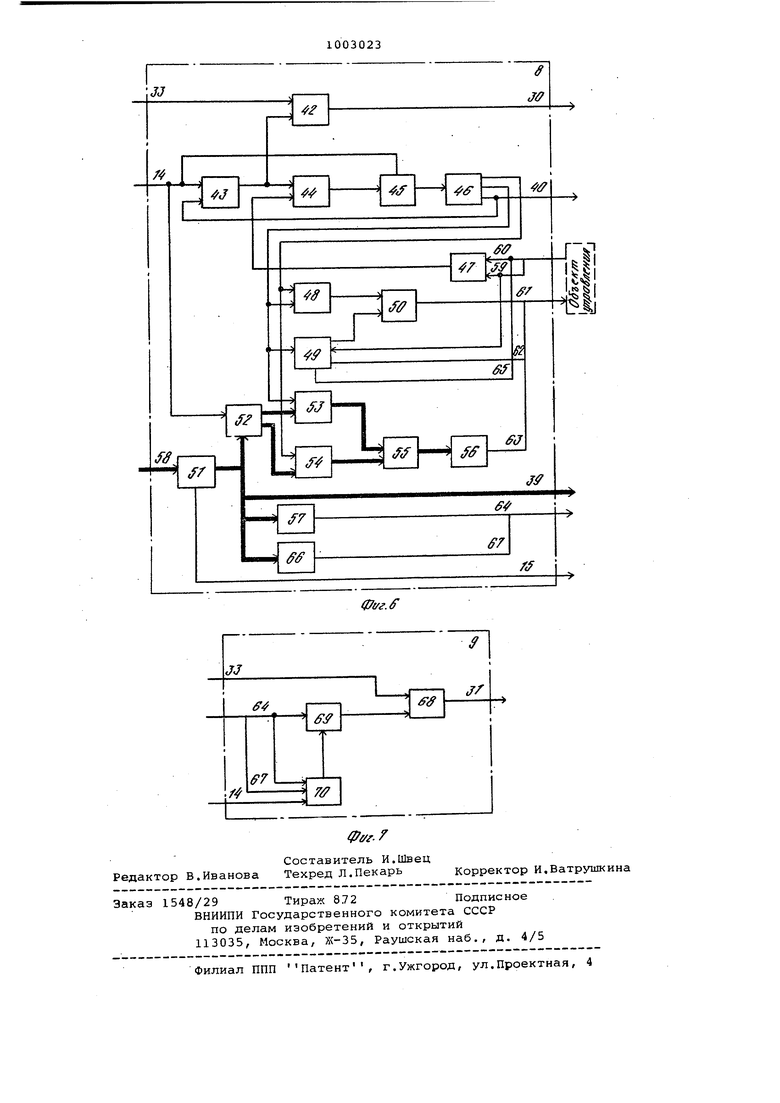
Наиболее близким техническим решением к изобретению является устройст25во для программного управления автоматическими линиями гальванопокрытий содержащее генератор импульсов, блок управления, первым выходом соединенный с первыми входами счетчиков вре30мени, и последовательно соединенные диспетчерский пульт, счетчики коман элемент ИЛИ, блок памяти и блок свя зи, первым выходом подключенный к первому входу диспетчерского пульта второй вход которого соединен с вто рым выходом блока управления, с вто рым входом блока связи, с вторыми входами счетчиков времени и счетчиков команд, третьими входами подклю (ченных к первым входам счетчиков вр мени и к третьему входу диспетчерск ,го пульта, второй выход которого че рез блок управления соединен с трет им входом блока связи, второй выход которого подключен к второму входу блока управления, а третий выход ,к третьим входам счетчиков времени, четвертыми входами соединенных с вы ходом генератора импульсов, а пятыми входами - с четвертьм выходом бл ка связи, четвертый выход блока управления подключен к второму входу блока памяти, третий вход - к перво му выходу диспетчерского пульта, а четвертый вход - к выходу счетчика времени 3. Недостатком известного устройств также является отсутствие блока, хр нящего и выдающего информацию о загрузке рабочих позиций, что может вызвать аварийное опускание подвески на занятую позицию как при сбое программы, так и в случае, когда произошел запрос автооператора от к кой-либо подвески для переноса ее в позицию, которая еще занята другой подвеской. Цель изобретения - повышение надежности работы устройства. Поставленная цель достигается те что в устройство для программного управления автоматическими линиями гальванопокрытий, введен блок состо яния позиции, первым входом подключенный к второму выходу блока управ ления, вторым входом - к третьему выходу блока управления, третьим вх дом - к пятому выходу блока связи, а выходом к второму входу блока управления. При этом блок состояния позиции содержит последовательно соединенные регистр, элемент сравнения и элемент И, выходом соединенный с выходом блока, а вторым входом - с вторнлм входом блока, первый и трети входы которого подключены к входам регистра. На фиг. 1 представлена функциональная схема устройства для программного управления; на фиг. 2 функциональная схема диспетчерского пульта; на фиг. 3 - функциональная схема блока управления; на фиг. 4 функциональная схема счетчика време ни; на фиг. 5 - структура команды; на фиг. 6 - функциональная схема бл ка связи с автооператорами; на фиг. функциональная схема блока состояния позиций. Устройство для программного управления (фиг. 1) содержит диспетчерский пульт 1, блок управления 2, счетчики команд , 3,- (где у - число каналов), счетчики времени 4..., , генератор импульсов 5, элемент ИЛИ 6, блок памяти 7, блок связи 8 с автооператорами, блок состояния позиций 9, Диспетчерский пульт (фиг. 2) предназначен для задания технологическо.го процесса обработки деталей. Он состоит из кнопок 10,.... 10,-. элементов И 11. , II.,- г триггеров I2v, 12,- и ламп индикации 13....., 13.J, входов (шин) 14, 15, 16..., 16. пульта, выходов (шин) 17..., 17. и 18 пульта. Блок управления 2 (фиг. 3) предназначен для формирования управляющих сигналов и организации синхронной работы всех функциональных узлов устройства. В блоке управления, построенному по микропрограммному принципу, принята канальная схема обслуживания подвесок с помощью автооператоров . За каждой подвеской закрепляется отдельный канал. Все каналы обслуживаются в режиме разделе- ния времени последовательно, начиная с младших номеров. Обслужив послед- . НИИ канал со старшим номером, блок управления переходит на обслуживание первого канала и т.д. Микрограммы обслуживания каисдого канала идентичны. Выполнение микропрограмм обеспечивает вызов автооператора к позиции, перенос подвески в следующую позицию с заданием времени выдержки в ней. Блок управления включает в себя элементы ИЛИ 19..., 19.,, элементы И , 2Ci , триггеры , 21-. элементы И , 22:;, генератор тактовых импульсов 23, распределитель тактовых импульсов 24, распределитель каналов 25, дешифратор микрокоманд 26, элемент ИЛИ 27, триггер 28, входы 29....... 29 блока управления, входы 30 и 31 блока, выходы 32-34 блока управления. Микропрограммы обслуживания; каналов реализуются с помощью генератора тактовых импульсов 23, который подключен к входу последовательно соединенных распределителей тактовых импульсов 24 и каналов 25. Выходы распределителя тактовых импульсов 24 подключены к входам дешифратора микрокоманд 26, который при наличии и разреш91ющих сигналов с выхода какого-либо из элементов И 22 и при отсутствии запрета с триггера 28, выдает последовательность микрокоманд. Распределитель каналов 25 последовательно формирует разрешающие сигналы поступающие на шины каналов , 16. Счетчики команд , 3 - формируют последовательность адресов команд программы по перемещению подвесок с деталями по гальванической линии в соответствии с технологическими процессами. Счетчики времени (фиг. 4) предназначены для обеспечения определенных: выдержек времени подвесок в каждой позиции. Счетчик времени состоит из элементов триггера разрешения счета 35, элемента И 36, вычитающего счетчика 37 и дешифратора нуля 38, входов 39 - 41 счетчика времени 4. Генератор импульсов 5 служит для .формирования импульсов определенной частоты, используемых для счета времени выдержки подвесок в позициях. Элемент 6 обеспечивает прием кодов адресов команд со счетчиков команд и выдачу их в блок памяти 7. Блок памяти 7 предназначен для хранения программ, описывающих маршруты движения подвесок по гальвани,ческой линии в соответствии с технологическими процессами. Блок связи 8 с автооператорами (фиг. 6) служит для приема команд из блока памяти 7, их промежуточного хранения, обработки и формирования управляющих сигналов автооператором, Он включает-в себя: элементы И 42, триггер 43, элемент И 44, счетчик 45 цикла работы автооператора, дешифратор цикла 46, элемент И 47, элемен ИЛИ 48, блоки включения привода вертикального движения автооператора 49 и горизонтального движения автоопера тора 50,предварительный регистр команды 51,исполнительный регистр кома ды 52,элементы И 53 и 54,элемент ИЛИ 55, дешифраторы номеров позиций 56 и 57,входы блока 58-60,выходы блока 61 64,входы 65,дешифратор номера позици 66, выход 67 блока. Команда по перемещению подвески из одной позиции в другую (фиг. 5) .содержит адрес позиции запроса, где находится подвеска, вызывающая автооператор, адрес позиции назначения, в которую данную подвеску необходимо перенести, длительность выдержки в этой позиции, а также дополнительные сведения,-- (например признак последней команды). Блок состояния позиций 9 :(фиг. 7) исключает возможность переноса подве ки в позицию, которая занята другой подвеской. Он состоит из элемента И 68, элемента сравнения 69 и регист ра состояния позиций 70. Устройство работает следующим образом. На диспетчерском пульте 1 (фиг.2) нажатием кнопки задают маршрут движе ния подвески с деталями по гальванической, линии в соответствии с требуе ым технологическим процессом. Пусть будет нажата кнопка 10. Поступающий при нажатии кнопки сигнал взводит триггер 12,,, и загорается лампа индикации 13, сигнализирующая и занятости первого канала. Сигнал с выхода кнопки 10 по шине 17 поступает на установочные входы счетчика команд 3 и на первый вход элемента ИЛИ 19-, блока управления (фиг. 3). В счетчике команд 3-, устанавливается начальный адрес команды, а сигнал с выхода элемента 19 взводит триггер 21 и с выхода его разрешающий сигнал поступает на первый вход элемента. На второй вход этого элемента по шине 18 поступает сигнал разрешения с выхода триггера 12-, (фиг. 2). На третий вход элемента 22 по шине, канала 16 поступает разрешающий сигнал с выхода распределителя каналов 25. (Сигнал с выхода элемента 22,, поступает на вход дешифратора микрокоманд 26, разрешая выработку микрокоманд обслуживания первого канала. Первая микрокоманда по шине 32 поступает в блок памяти 7 и по адресу, поступающему на вход блока памяти с выхода счетчика команд 3,, через элемент ИЛИ 6, из блока памяти считывается команда. Счетчики команд 3,..., 3.J стробируются сигналами сраспределителя каналов 25, и, так как имеется разрешающий сигнал на шине 16, поступающий на вход счетчика команд 3, на вход элемента ИЛИ 6 поступает код адреса только с выхода этого счетчика. Считанная из блока памяти команда по шинам 58 поступает в предварительный регистр команд 51 блока связи 8 с автооператорамй (фиг. 6). Код адреса позиции назначения команды (фиг. 5) поступает на вход дешифратора 57, и на его выходе появляется сигнал, который по шине 64 поступает на первый вход элемента сравнения 69 блока контроля состояния позиций(фиг.7).На второй вход элемента сравнения 69 поступают сигналы с регистра состояния позиций 70.Если позиция назначения занята, то .сигналом с соответствующего триггера регистра 70 формируется сигнал на выходе схемы сравнения 69. С выхода схемы сравнения 69 сигнал поступает на. первый вход элемента И 68. На второй вход этого элемента по шине 33 поступает вторая микрокоманда с блока управления 2. На выходе элемента 68 появляется сигнал, который по шине 31 поступает на вход элемента 27 блока управления (фиг. 3). Поступающий с выхода элемента 27 сигнал взводит . триггер 28, который воздействует на вход дешифратора микрокоманд 26, запрещает дальнейшую выдачу микроко- манд с выхода дешифратора микрокоманд, кроме микрокоманды сброса триг гера 28, которая поступает в конце микропрограммы обслуживания каждого канала. Тем самым исключается возмож ность переноса подвески в занятую по зицию. Одновременно с проверкой занятости позиции назначения проверяется на занятость автооператор. Если автоопе ратор занят, то с выхода триггера 43 (фиг. б) на первый вход элемента И 42 поступает разрешающий сигнал, на второй вход которого по шине 33 по-, ступает вторая микрокоманда с блока управления, при этом на выходе элемента 42 появляется сигнал, который по шине 30 поступает на вход элемента ИЛИ 27 блока управления (фиг. 3), производя аналогичную работу, что и сигнал с выхода элемента 68 блока 9. Если позиция назначения и автоопе ратор свободны, то отсутствуют сигналы с выхода элемента 68 {фиг. 7) и элемента 42 (фиг. 6), следовательно, триггер 28 в блоке управления (фиг. 3) взводиться не будет, и с дешифратора микрокоманд 26 продолжа.ют поступать микрокоманды обслуживания первого канала. Третьей микрокомандой увеличивает ся содержимое счетчика команд 3, на единицу переписывается код времени выдерх(ки из регистра команд 51 блока 8 ё счетчике времени 4, производится опрос, не является ли команда в регистре 51 последней, а также в блоке 9 сбрасывается признак заня-тос ти позиции запроса при одновременном формировании признака занятости позиции назначения. Кроме того, в блоке 8 формируется .признак занятости автооператора и производится перевод блока 8 на автономный режим работы. Рассмотрим работу блоков от треть ей микрокоманды подробнее. В диспетчерском пульте (фиг. 2) микрокоманда по шине 14 поступает на первый вход элементов И 11..., И.; . На второй вход этих элементов по шинам , 16,- поступают разрешаю щие сигналы с распределителя каналов 25 блока управления 2. Так как обслу живается первый канал, то имеется разрешающий сигнал на входе элемента И ,, поступающий по шине 16. На третий вход элементов И подается сигнал с предварительного регистра команд 51 блока 8. Этот сиг нал появляется лишь в том случае, если была считана последняя команда программы, описывающей маршрут движе ния подвески в соответствии с технологическим процессом. В этом случае появляется сигнал на выходе элемента И 11.,, который сбрасывает триггер 12 В результате этого гаснет лампа индикации, сигнализируя, об окончании технологического процесса и освобождении первого канала. Третья микрокоманда, поступая на вход счетчика микрокоманд 3 , увеличивает его содержимое на единицу, тем самым в счетчике устанавливается адрес следующей команды. В счетчике времени 4 (фиг. 4) третья микрокоманда по шине 14 поступает на первый вход элемента И 34. На второй вход этого элемента поступает разрешающий сигнал по шине канала 16. Сигнал с выхода элемента И 34 сбрасывает триггер 35 и его запрещающий сигнал, поступая на вход элемента 36, не пропускает на выход этого элемента импульсы с генератора 5, поступающие на шину 41. В блоке состояния позиций (фиг.7) третья микрокоманда поступает на первый вход регистра состояния позиций 70, на второй вход которого по шине 64 поступает сигнал с дешифратора позиций 57 блока 8 об адресе позиции запроса, а на третий вход по шине 67 - сигнал с дешифратора позиций 66 об адресе позиций назначения, при этом в регистре состояния позиций 70 (фиг. 7) происходит сброс триггера позиции запроса и запись триггера позиции назначения. Поступая по шине 14 на исполни- , тельный регистр команд 52 блока 8 (фиг. 6), третья микрокоманда разрешает перепись в него из предварительного регистра команд 51 кодов адресов позиции запроса и позиции назначения. Код времени выдержки из регистра 51 по входу 39 переписывается в вычитающий счетчик 37 (фиг. 4). Одновременно третья микрокоманда по шине 14 в блоке 8 взводит триггер 43 и обнуляет счетчик цикла 45. Сигнал с выхода триггера 43 поступает на элемент И 44, разрешая подачу сигналов на вход сметчика цикла 45 и на элемент И 42, разрешая выдачу по ши не 30 сигнал о занятости автооператора. Четвертая и пятая микрокоманды блока управления 2 служат для переключения каналов обслуживания, причем четвертая микрокоманда сбрасывает триггер 21 разрешения обслухшвания первого канала до окончания времени выдержки подвески в позиции назначения, после чего сигналом со счетчика времени триггер 21 вновь взводится и тем самым осуществляется запрос на обслуживание подвески первого канала. Четвертая микрокоманда с выхода дешифратора микрокоманд поступает на входы элементов , 20 блока управления (фиг. 3). Так как сигнал разрешения с распределителя каналов имеется на шине 16-(, то появляется сигнал на выходе элемента И 2Q ,- который сбрасываеттриггер 21, с выхода которого на вход элемента И 22 поступает запрет на обслуживание пер вого канала. Триггер 21 будет находиться в состоянии нуля весь цикл обслуживания подвески, который включает в себя перенос подвески из позиции запроса в позицию назначения и вьщержки ее в этой позиции. После окончания выдержки триггер 21 вновь взводится и вновь будет обслуживаться первый канал. Пятая микрокоманда сбрасывает три гер 28 блока управления 2 и цикл его работы по обслуживанию первого канала заканчивается. Распределитель каналов 25, получив сигнал с выхода распределителя тактовых импульсов 24 формирует разрешающий сигнал на шине 1б2« Далее будет обслуживаться второй канал, затем третий и т.д. Получив команду, блок связи 8 с автооператорами (фиг. 6) работает ав тономно . Как было отмечено выше третьей микрокомандой обнуляется счетчик цикла 45, при этом появляется сигнал на первом выходе дешифратора 46, который через элемент ИЛИ 48 поступает на схему включения привода горизонтального движения автооперато ра 50, которая по шине 61 включает привод горизонтального движения. Од1новременно сигнал с первого выхода дешифратора 46 поступает на первый .вход элемента И 53 и пропускает из регистра команд 52 код адреса позиции запроса через элемент ИЛИ 55 на дешифратор позиции 56, который по шинам 63 выдает информацию с номера позиции запроса. Начинается движение автооператора в запрашиваемую позицию. При достижении автооператором позиции на первый вход элемента И 47 поступает сигнал обратной связи Стоп по адресу. На втором входе элемента И 47 имеется сигнал обратной связи Нижнее положение автооператора, поступающий по шине 60. Появляющийся сигнал на выходе элемен та И 47 проходит на выход элемента И 44 и устанавливает счетчик цикла 45 в следующее состояние. Теперь появляется сигнал на втором выходе дешифратора 46, который, поступая на первый вход элемента И 54, пропускает из регистра команд 52 код адреса позиции назначения через элемент ИЛИ 55 на дешифратор позиции 56. Одновре менно сигнал с второго выхода дешифратора 46 поступает на вход схемы включения привода вертикального движения автооператора 49, а через элемент ИЛИ 48 - на вход блока включения привода горизонтального движения автооператора 50. Со схемы включения привода вертикального движения автооператора 49 по шине 62 включае ся привод автооператора на движение вверх. С второго выхода схемы 49 на вход схемы включения привода горизонтального движения 50 поступает сигнал, запрещающий выдачу сигнала на шину 61. При достижении автооператором . верхнего положения по шине 65 на вход блока 49 поступает сигнал обратной связи Верхнее положение автооператора , при этом исчезает сигнал на шине 62 а также сигнал запрета на входе схемы 50, на выходе которой появляется сигнал включения привода горизонтального перемещения автооператора. При достижении автооператором позиции назначения появляется сигнал обратной связи Стоп по адресу , который через шину 59 поступает на вход элемента И 47 и вход схемы 49, с выхода которой по шине 62 выдается сигнал включения привода автооператора на движение вниз. С второго выхода схемы 49 на вход схемы 50 поступает сигнал запрета, при этом исчезает сигнал на шине 61. При достихсении автооператором нижнего положения появляется сигнал обратной связи Нихснее положение автооператора . Этот сигнал по шине 60 поступает на входы элемента И 47. На другом входе этого элемента уже имеет ся сигнал Стоп по адресу Сигнал с выхода элемента И 47 через элемент И 44 поступает на вход счетчика цикла 46, изменяя его состояние. Появляется сигнал на третьем выходе дешифратора 46, который сбрасывает триг Гер занятости автооператора 43, а поступая по шине 40 на вход триггера 35 счетчика времени (фиг. 4), взводит его. На этом автономный цикл работы блока 8 заканчивается. Разрешающий сигнал с выхода триггера 35 поступает на вход элемента И36, пропуская на вход счетчика времени 37 импульсы с генератора импульсов, поступающие на шину 41. Счетчик работает в режиме вычитания поступающих па его вход импульсов. Как только содержимое счетчика 37 становится равным нулю, на выходе подключе ного к нему дешифратора нуля 38 появляется сигнал, который, поступая на вход элемента И 36, запрещает прохождение импульсов на вход счетчика, а поступая по шине 29- через элемент ИЛИ 19 блока управления (фиг. 3), взводит триггер 21. При этом на входе элемента И 22-, появляется сигнал разрешения обслуживания первого канала. Вновь повторяется цикл обслуживания подвески по первЬму каналу, заключающийся в пеpieHoce подвески в следующую согласно технологическому процессу позицию и выдержке ее в этой позиции и т.д., пока не будет выполнена последняя
команда, после выполнения которой, как было рассмотрено выше, третьей микрокомандой сбрасывается триггер 12 и гаснет лампа индикации 13., говор.я об окончании технологического процесса.
Таким образом, предлагаемое устройство для программного управления выдает сигналы автооператору на перенос подвески в позицию назначения только при условии, что данная позиция свободна. Испытания показали надежность работы устройства при различных сбоях программы.
До введения в устройство блока состояния позиций для .исключения переноса подвески в занятую позицию приходилось увеличивать интервалы между запусками, что приводило к уменьшению эффективности работы линии. Кроме того, при сбоях программы все равно Haблюдались случаи опускания подвесок На занятые позиции. Введение блока состояния позиций привело к повышению производительности работы гальванической линии в среднем на 15%.
Формула изобретения
1, Устройство для программного управления автоматическими линиями гальванопокрытий, содержащее генератор импульсов , блок управления, первым выходом соединенный с первыми входами счечиков времени,и последовательно соединенные диспетчерский пульт,счетчики команд, элемент ИЛИ, блок памяти и блок связи, первым выходом подключенной к первому входу диспетчерского пульта, .второй вход которого соединен с вторым в.ыходом блока управления, с вторым входом блока связи, с вторыми входами счетчиков времени и счетчиков команд, третьими входами подключенных к Первым входам счетчиков времени и к третьему входу диспетчерсgoro пульта, второй выход которого через блок управления соединен с третьим входом блока связи,второй выход которого подключен к второму входу блока управления,а третий выход - к третьим входам счетчиков времени четвертыми входами соединенных с выходом генератора импульсов, а пятыми входами - с четвертым выходом блока связи, четвертый выход блоки управления подключен к второму входу блока памяти, третий вход - к первому выходу диспетчерского пульта, а четвертый входк выходу счетчика времени, о т л и чающее с я тем, что, с целью повышения надежности работы устройства, в него введен блок состояния позиции, первым входом подключенный к второму выходу блока управления, вторым входом - к третьему выходу блока управления, третьим входом - к пятрму выходу блока связи, а выходом к второму входу блока управления.
2. Устройство по п. 1, отличающееся тем, что блок состояния позиции содержит последовательно соединенные регистр состояния позиций, элемент сравнения и элемент И, выходом соединенный с выходом блока, а вторым входом - с вторым входом блока, первый и третий входы которого подключены к входам регистра.
Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР 406962, кл. С 23 В 5/68, 1965.
2.Авторское свидетельство СССР № 815716, кл. G 06 В 19/17, 1980.
3.Авторское свидетельство СССР
по заявке № 3316760, кл. G 05 В 19/18 1981 (прототип) .


| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для программного управления | 1982 |
|
SU1057925A1 |
| Устройство для программного управления автоматическими линиями гальванопокрытий | 1983 |
|
SU1173393A1 |
| Устройство для программного управления | 1981 |
|
SU1029145A1 |
| Устройство для программного управления | 1982 |
|
SU1067470A1 |
| Устройство для централизованногопРОгРАММНОгО упРАВлЕНия АВТООпЕРА-ТОРАМи | 1978 |
|
SU815716A1 |
| Устройство для программного управления | 1979 |
|
SU842713A1 |
| Устройство для программного управления | 1980 |
|
SU954940A2 |
| Устройство для управления автооператорами гальванических линий | 1986 |
|
SU1327061A1 |
| Устройство управления для кассетной памяти на цилиндрических магнитных доменах | 1987 |
|
SU1495850A1 |
| Микропрограммное устройство управления | 1985 |
|
SU1315974A1 |
Л J
/
Л
.//ff/ f//
af ft«f/
г елУб/
fffff/Vi/ /7/7ff fAKif
фуг.
Cjty e /ftfe ff ay jffeeff ( /% ЛУЛ /ОйЧхг гЙ/ /Xfjff ffff Jff/ /fffCff/fffJAffffre &jr / 5ЙУ 5
fffmpff/ff/fff/f7ff/fff fty fCMvs fff /
