регистра кода и с первым входом регистра номера канала, второй вход которого через первый формирователь
одиночных импульсов подключен к BTOv
рому входу блока.
3. Устройство по П.1, о тл и чающееся тем, что блок управления содержит дешифратор команд, группу элементов ИЛИ, первую и вторую группу элементов И,элемент И, триггер, первую и вторую группы триггеров и последовательно соединенные генератор тактовых импульсов, распределитель тактовых импульсов и распределитель каналов ,;выход распределителя тактовых импульсов подключен к входам дешифратора команд, к первым входам
второй группы триггеров, к первому входу триггера и первым входам, элементов И второй группы, вторые входы которых соединены с вторьпи входом блока управления, третьи входы - с выходами распределителя каналов и с пер,выми входами элементов И первой группы, вторые входы которых соединены с выходами дешифратора команд, вторые входы которых подключены к выходам триггеров второй группы и к выходу
i триггера,- вторые входы блока управления через группу элементов ИЛИ подключены к первым входам триггеров первой группы, вторые входы которых соединены с выходами элементов И первой группы, а выходы - с третьими входами элементов И второй группы.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для программного управления автоматическими линиями гальванопокрытий | 1983 |
|
SU1173393A1 |
| Устройство для программного управления | 1981 |
|
SU1029145A1 |
| Устройство для программного управления автоматическими линиями гальванопокрытий | 1981 |
|
SU1003023A1 |
| Устройство для централизованногопРОгРАММНОгО упРАВлЕНия АВТООпЕРА-ТОРАМи | 1978 |
|
SU815716A1 |
| Устройство для программного управления | 1982 |
|
SU1067470A1 |
| Устройство для программного управления | 1980 |
|
SU954940A2 |
| Устройство для программного управления | 1979 |
|
SU842713A1 |
| Устройство для управления автооператорами гальванических линий | 1986 |
|
SU1327061A1 |
| Устройство для управления автоматическими линиями | 1983 |
|
SU1149223A1 |
| Устройство программного управления автооператорами многопроцессных автоматических линий гальванопокрытий | 1982 |
|
SU1081243A1 |
1УСТРОЙСТВО ДЛЯ ПРОГРАММНОГО УПРАВЛЕНИЯ, содержащее диспетчерский пульт, генератор импульса, соединенный выходом с первыми входами счетчикор времени выдержки подвесок, последовательно соединенные блок управления, счетчики адреса, элемент ИЛИ, блок памяти и блок связи с автооператором, первый вы.ход которого подключен к первому входу блока управления, втотрой и третий выходы - соответственно к второму и третьему входам счетчиков времени выдержки подвесок, а второй вход блока связи с автооператором соединен с вторым входом блока памяти, с третьим входом счетчика времени выдержки подвесок, свторым входом счетчиков адреса, с втоьык выходом блока управления и с первым входом диспетчерского пульта, второй вход которого соединен с четвертым выходом блока свя с автооператором, третий вход - с первым выводом блока управления, а выход - с вторым входом блока управления, отличающееся тем, чтр, с целью повышения точности управления технологическим процессом, в устройство введен блок сравнения, подключенный первым входом к первому выходу лока связи с автооператором, вторым входом - к пятому выходу блока связи с aBToonepaTopoMj. третьим входом - к первым выходам счетчиков времени выдержки подвесок, четвертым входом - к второму выходу блока управления, пятым входом - к первому выходу блока управления, шестым входом - к второму выходу счетчика времени выдержки подвесок, первым выходом - к третьему входу блока связи с автооператором, вторым выходомк третьему входу блока памяти и к третьим входам счетчиков адреса. 2. Устройство по п.1, о т л и чающееся тем, что блок сравнения, содержит первый формирователь одиночного импульса, регистр кода времени выдержки, элемент сравнения, регистр номера KBHajia, группу элементов И, соединен«ые выходами через первый элемент ИЛИ с первыми входами первого и второго элементов И, вторые входам которых подключены к шестому входу блока сравнения, последовательно соединенные второй элемент ИЛИ первый инвертор, третий элемент И, триггер, второй инвертор и второй формирователь одиночного импульса, выход которого подключен к первому Р входу регистра номера канала, третий Л К1 инвентор, подключенный входом к первому входу блока сравнения, а выходом - к второглу входу третьего ND У1 ;мента И,четвертый элемент И через третий элемент ИЛИ соединен с вторьг вхог дом триггер а, выход которого соединен с вторыгда входами элемент.ов И группы,третьи входы котор ых соединены с пятылм входами блока, а четвертые вхохсы - с третьими входами блока, с вторым входом -четвертого элемента И и с четвертым входом третьего элемента И, выход второго элемента И соединен с первым входом элемента сравнения, второй вход которого подклиочен к выходу jierHCTpa кода, а выход - к третьему входу первого элемента И, соединенного выходом с первым входом
Изобретение относится к автомати4eCKONry управлению и может быть при. менено при автоматизации агрегатных многопроцессных гальванических линий Известно устройство для цен.трали. зованного программного управления автооператорами, содержащее диспетчерский пульт, связанный через первы блок связи и блок управления с запоминающим узлом, а через первый переключатель команд (для задания технологического процесса) с блоком управ ления автооператорами, второй переключатель команд для задания основно ванны, связанный с блоком управления автооператорами и регистром для счет времени основных ванн, задающий гене ратор, импульсы с которого поступают на регистр для счета времени основны ванн, блок управления автооператорами, соединенный с блоком управления и регистром для счета времени основных ванн, и второй блок связи с авто операторами, связанный с блоком управления автооператорами и запоминающим узлом fl . Недостатком устройстваявляется отклонение действительных времен выдержки деталей в ваннах от номинальных, т.е.передержка,равная времени движения автооператора от позиции, в которой он находился в момент запроса, до позиции, в которой находится подвеска, пославшая этот запрос. Наиболее близким к предлагаемому является устройство для программного управления, соедржащее диспетчерский пульт, связанный через счетчики адресов команд и схему ИЛИ с блоком памяти; генератор импульсов времени,связанный со счетчиками времени, блок управления, связанный со счетчиками адресов команд, с блоком связи с автооператорами и со счетчиками времени, блок связи с автооператорами, связанный с блоком- памяти и счетчиками времени 2 . В данном устройстве запрос автооператору на перенос подвески с деталйми также вырабатывается только после окончаниявремени выдержки деталей в позиции запроса. Если в это время автооператор находится в другой позиции (т.е. последней он обслуживал другую подвеску), то неизбежна передержка деталей в позиции запроса на время, равное времени движения автооператора до этой позиции. Цель изобретения - повышение точности управления технологическим процессом. Поставленная цель достигается тем, что, в устройство для программного управления, содержащее диспетчерский пульт, генератор импульсов, соединенный выходом с первыми- входагли счетчиков времени выдержки подвесок, последовательно соединенные блок управления, счетчики адреса, элемент ИЛИ, блок памятки и блок связи с автооператором ,первый выход которого подключен к первому входу блока управления, второй и третий выходы - соответственно к второму и третьему входам счетчиков времени выдержки подвесок, а второй вход блока связи с автооператорок соединен с вторым входом блока памяти, с третьим входом счетчика времени выдержки подвесок с вторым входом счетчиков адреса,, с вторым выходом блока управления с первым входом диспетчерского пульта, второй вход которого соединен с четвертым выходом блока связ
с автооператором, третий вход-- с первым выходом блока управления, а выход - с вторым входом блока управления, введен блок сравнения, подключенный первым входом к nepBON-y выходу блока связи с автооператорсм, вторым входом - к пятому выходу блок связи с автооператором, третьим входом - к первым выходам счетчиков времени выдержки подвесок, четвертым входом - к второму выходу блока управления, пятым входом - к первому выходу блока управления, шестым входом - к второму выходу счетчика вре|Мени выдержки подвесок, первым выхо дом - к третьему входу блока связи с автооператором, вторы выходом - к третьему входу блока памяти и к третьим входам счетчиков адреса.
Блок сравнения содержит первый формирователь одиночного импульса, регистр кода времени выдержки, эле мент сравнения, регистр номера канала, группу элементов И, соединенные выходами через первый элемент ИЛИ с первыми входами первого и второго элементов И, вторые входы которых подклю.-ны к шестому входу блока сравнения, последовательно соединенные второй элемент ИЛИ, первый инвертор, третий элемент И, триггер, второй инвертор и второй формирователь одиночного импульса, выход которого подключен к первому входу регистра номера канала, третий инвертор, подключенный входом к первому входу блока сравнения,-а выходом - к второму входу третьего элемента И, четвертый элемент И через третий элемент ИЛИ соединен с вторым входом триггера, выход которого соединен с вторыми входами элементов И группы, третьи входы которых соединены с входами блока,а четвертые входы - с третьими входами блока, с вторым входом четвертого элемента И и с четвертым входом третьего элемента И, выход второго элемента И соедиен с первым входом элемента сравнения, второй вход которого подключен к выходу регистра кода, а выход - к третьему входу первого элемента И, соединенного выходом с первым входом регистра кода и с первым входом регистра номера канала, второй вход которого через первый формирователь одиночных импульсов подключен к второму входу блока,
Блок управления содержит деиифра- тор команд, группу элементов ИЛИ, первую и вторую группу элементов И, элемент И, триггер, первую и вторую группы триггеров последовательно соединенные генератор тактовых импульсов, распределитель тактовых импульсов и распределитель кангшов, выход распределителя тактовых импульсов подключен к входам дешифратора команд, к первым входам второй группы , триггеров, к первому входу триггера и к первым входам элементов И второй группы, вторые входы которых соединены с вторым входом блока управления, третьи входы - с выходами распределителя каналов и с первыми входами элементов И первой группы, втррие входы которых соединены с выходаг-ш дешифратора команд, вторые входы которых подключены к выходам триггеров второй группы и к выходу триггера, вторые входы блока управления через группу элементов ИЛИ подключены к первым входам триггеров первой группы, вторые входы которых .соединены с выходами элементов И первойгруппы, а выходы - с третьими входами элементов И второй групгал.
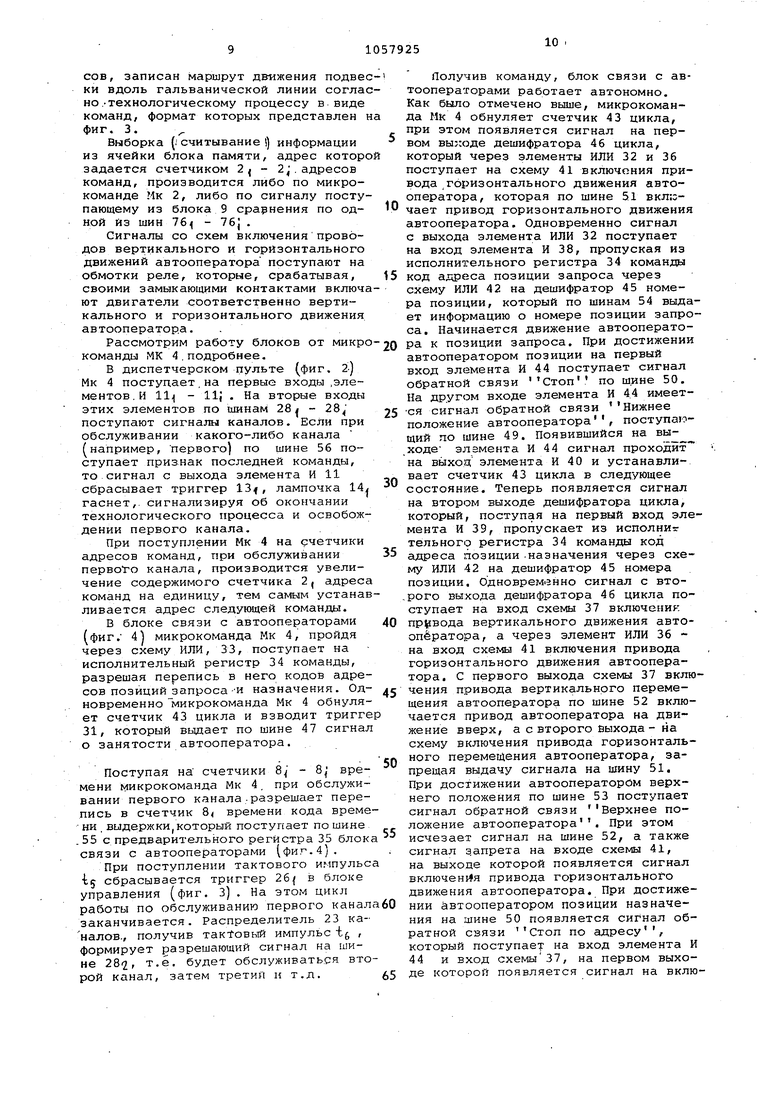
На фиг. 1 представлена функциональная схема устройства для программного управления}, на фиг. 2 - функциональная схема диспетчерского пульта на фиг. 3 - функциональная схема блока управления, на фиг. 4 - функциональная схема блока связи с автооператорами; на фиг. 5 - функциональная схема блока сравнения; на фиг. 6 функциональная схема счетчика времени выдержки подвесок.
Устройство для программного управления {фиг. 1) содержит диспетчерский пульт 1, счетчик адресов команд (где i - число каналов), элемент ИЛИ 3, блок 4 памяти, блок 5 связи с автооператорами, блок 6 управления , генератор 7 импульсов времени, счетчики 8 - 8 времени, блок 9 сравнения.
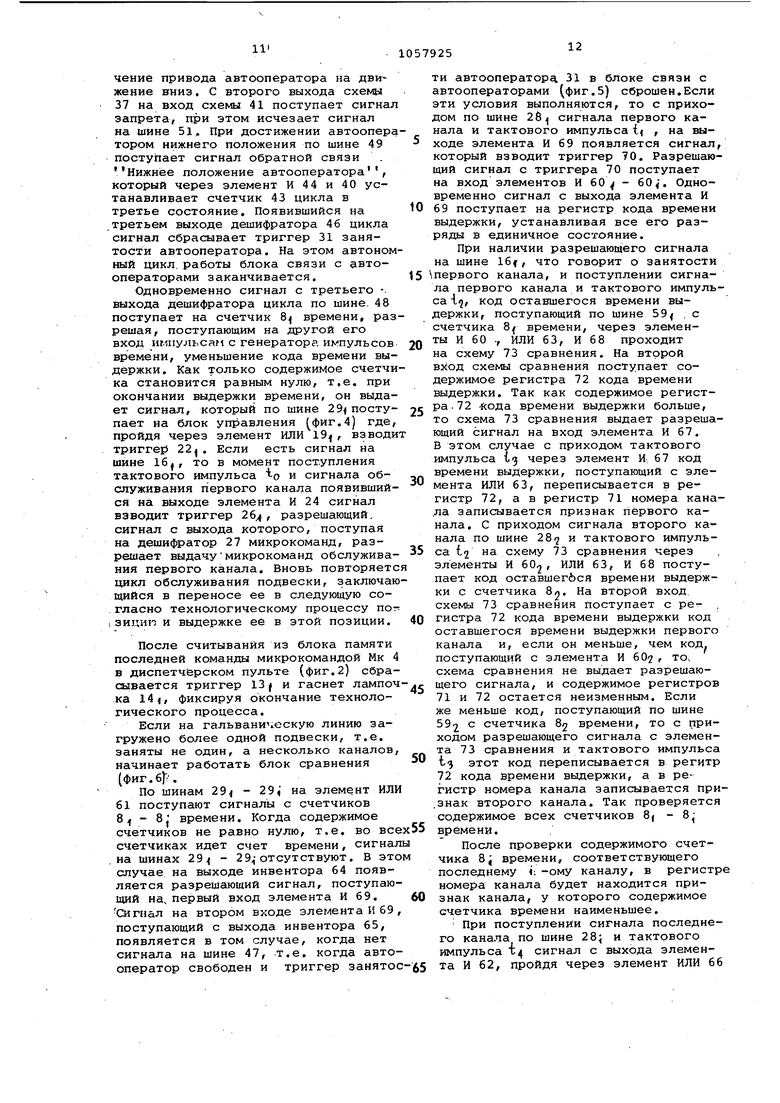
Диспетчерский пульт (фиг. 2) предназначен для задания технологического процесса обработки деталей. Он состоит из кнопок lOf - 10 , элементов И 11( - , формирователей 12 - 12 одиночных импульсов, триггеров ,ламп 14/индикации, выходных шин 15 - iSf II 16j - 16{ лиспетчерского пульта
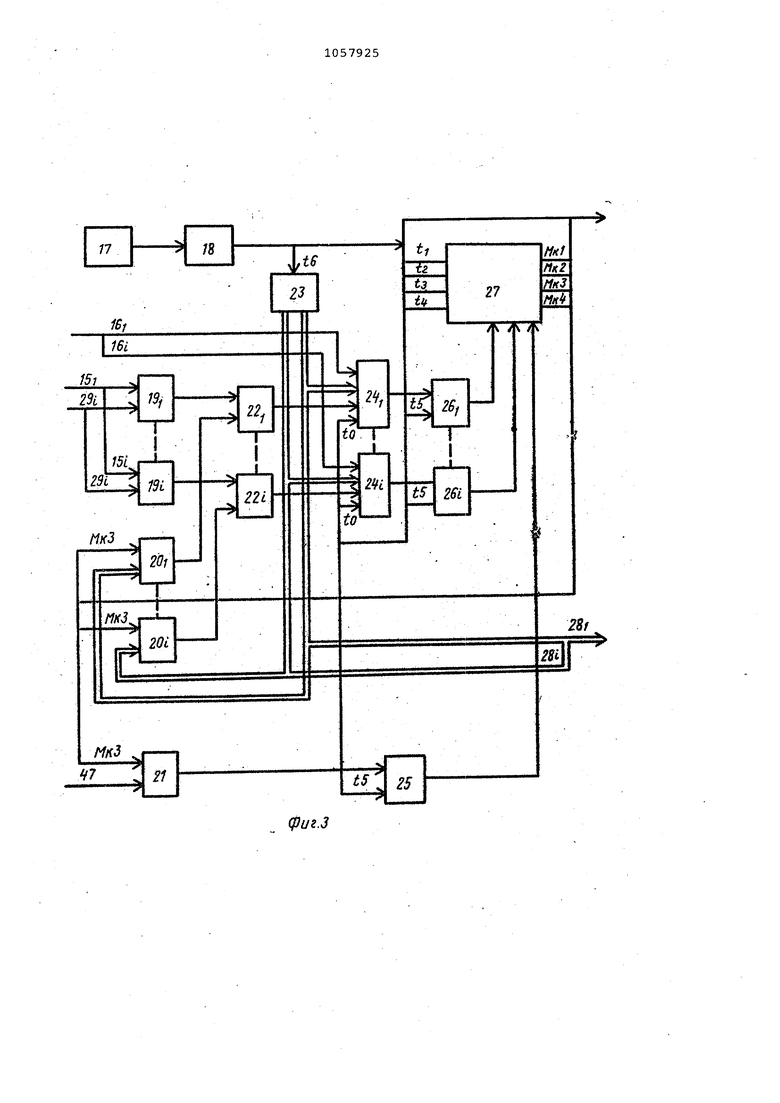
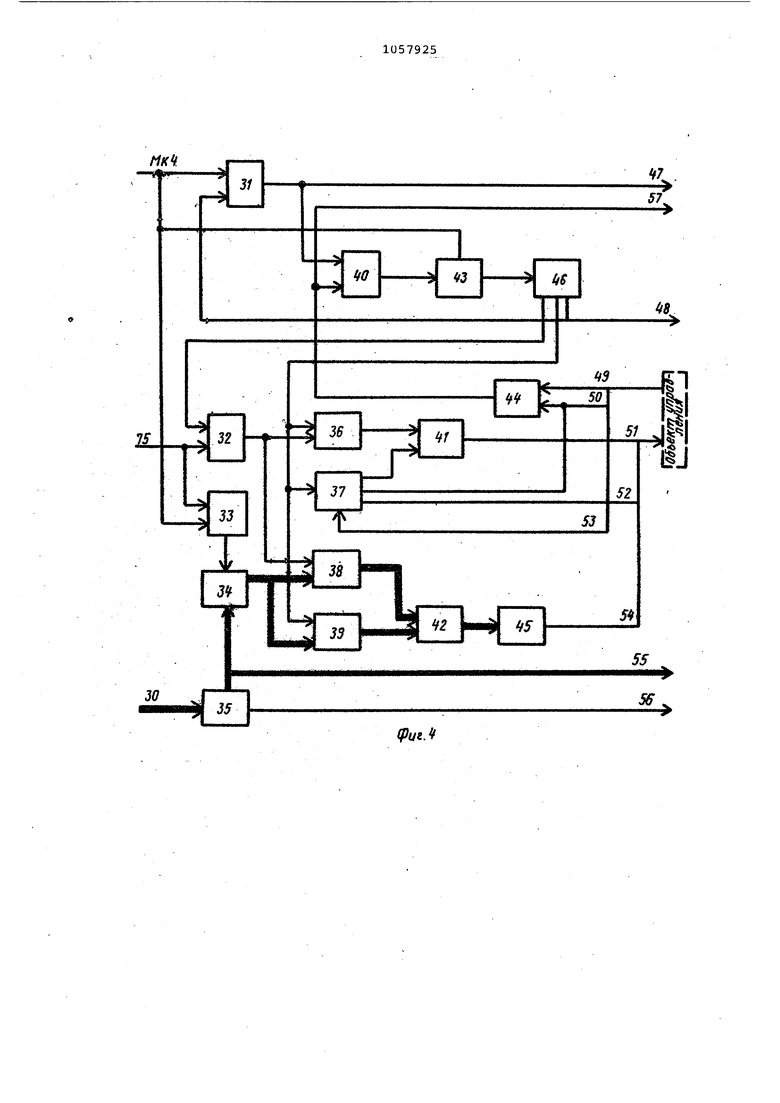
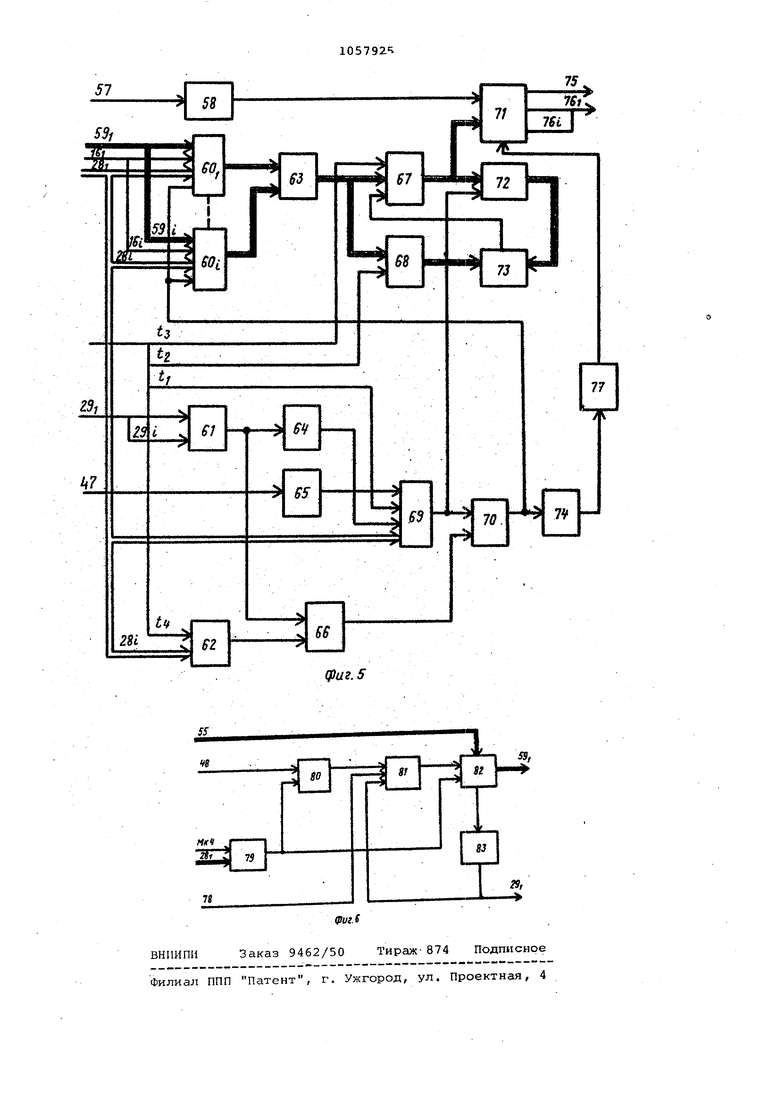
Блок управления (фиг. 3) предназначен для формирования управляющих сигналов и организации синхронной работы всех узлов устройства. В блоке управления, построенном по микропрограммному принципу,-принята канальная схема обслуживания подвесок с помощью автооператоров. За каждой подвеской закрепляется отдельный канал. Все кансшы обслуживаются в режиме разделения времени последовательно, начиная с младших номеров. Обслужив последний канал со старшим номером, блок управления переходит на обслуживание второго канала и т.д. МикропрограмкЕл обслуживания кгикдого канала идентичны. Выполнение микропрограмм обесп,ечивает вызов автооператора к позиции, перенос подвески в следую-,. щую позицию с заданием времени выдержки в ней. Блок управления включает в себя генератор 17 тактовых импульсов, распределитель 18 тактовых импульсов, элементы ИЛИ 19 - 19 элементы И 20 - 20, и 21, триггеры 22 - 22(f распределитель 23 канало элементы И 24 - 24, триггеры 25, 26, - 26, , дешифратор 27 команд, вы ходные шины микрокоманд и тактовых импульсов, выходные шины 28 - 28;. Микропрограммы обслуживания каналов реализируются с помощью генератора 17 тактовых импульсов, который подключен к входу последовательно соед ненных распределителей 18 тактовых импульсов и канаиюв 23. Тактовые импульсы Ч, - 4 распределителя 18 тактовых импульсов поступают на дешифратор 27 микрокоманд, который, при наличии разрешающего сигнала с выхода какого-либо из триггеров 26 - 26 и при отсутствии запрета с триггера 25, выдает последователь ность микрокоманд. Номера микрокома соответствуют номерам тактовых импульсов. Распределитель 23 каналов последовательно формирует разрешающ сигналы, поступающие на шины 28 - 2 при этом переключение каналов происходит в момент поступления тактоjBoro импульса-t, 29 - 29; - Входы 30 блока управления - вход блока св зи (фиг. 4) . Блок связи с автооператорами (фиг. 4) служит для приема команд с блока 4 памяти, их промежуточного хранения, обработки и формирования управляющих сигналов автооператорам Он включает в себя триггер 31, элементы ИЛИ32 и 33, исполнительный ,регистр 34 команды, предварительный региагф 35 команды, элемент ИЛИ 36, схему 37 включения привода вертикального движения автооператора, эле менты И 38 - 40,441схему 41 включени привода горизон -ального движения автооператора, элемент ИЛИ 42, счетчик 43 цикла, элемент И 44, дешифратор 45 номера позиции, дешифратор 46 цикла, шину 47 триггер занятости автооператора, шину 48 разрешения счета, шины 49 - 54 управления автооператором, шину 55кода времени выдержки,.шину 56 сигнала последней команды технологического процесса 56, шину 57 обратной связи. Блок сравнения (фиг. 5) служит для сравнения оставшихся времен выдержки всех находящихся на линии подвесок и форГМрования управляющих сигналов для движения автооператора к п.одвеске, оставшееся время выдержки у которой наименьшее. Он состоит из формирователей 58 одиночных импульсов, элементов И 60 - 60 , элемента ИЛИ 61, элемента И 62, элемента ИЛИ 63, инвертора 64 и 65, элемента ИЛИ 66, элементов И 67 - 69, триггера 70, регистра 71 номера канала, регистра 72 кода времени выдержки, элемента 73 сравнения, инвентора 74, шины 75 управления автооператорами, шин 76 - 76 номера канала, формирователя 77 одиночных импульсов. Счетчики 2 - 2j адресов команд формируют последовательность адресов команд программ : по перемещению подвесок с деталями по гальванической линии в соответствии с технологическими процессами. Элемент ИЛИ 3 рбеспечивает прием кодов адреса команд со счетчиков адресов команд и выдачу их в блок 4 памяти.. Блок 4 памяти предназначен для хранения программ, описывающих маршруты движения подвесок по гальванической линии в соответствии с технологически1 ш процессами. Генератор 7 импульсов времени служит для формирования импульсов определенной частоты, используегЛых для счета времени выдержки подвесок в позициях. Счетчики 8 - 8 времени предназначены для обеспечения определенных выдержек времени подвесок в каждой позиции, а также для выдачи кода оставшихся времен выдержки в блок 9 сравнения. Н.а фиг. 6 представлена функциональная схема счетчика времени, который состоит из входящей управляющей uiHHbi 78-, элемента И 79, триггера 80, элемента И 81, вычитающего счетчика 82, дешифратора 83; нуля, шины Мк4 микрокоманды, выходной управлякедей / шины 29.f , и выходной информационной шины 59. Устройство работает следующим образом. На диспетчерском пульте (фиг. 2J нажатием кнопки задают маршрут движения подвески с деталями по гальванической линии в соответствии с требуемым технологическим процессом. Пусть будет нажата кнопка lOj . Сигнал с кнопки поступает на вход формирователя 12 одиночных импульсов, импульс с выхода которого взводит триггер 13. С выхода триггера 13 сигнал поступает на лампочку 14, которая загорается, сигнализируя о занятости первого канала, а также по шине 16 ( - на первый, вход /Элемента И 24 блока управления (фиг.4) . Одновременно импульс с формирователя 12 поступает по шине 15((на блок управения (фиг.4) , где, пройдя через элемент ИЛИ 19f, взводит триггер 22 сигнал с выхода которого поступает на второй вход элементу И 24. На третий вход элемента И 24 поступает: азрешающий сигнал с выхода распределителя каналов 23, С появлением тактового импульса tp , сигналом с выхода элемента Н 24 взводится триг гер 26I. Сигнал с выхода поступает на вход дешифратора микрокоманд 27, разрешая выработку микрокоманд обслуживания первого канала. Первая микрокоманда Мк 1 поступает на входы счетчиков адресов команд. На их вторые входы по шинам 28 - 28 поступают сигналы каналов. Так как обслуживается первый кангш, то микро команда Мк 1 установит в счетчике 2, адреса команд начгьпьный адрес команды заданного технологического npoit,ecca, который через схему ИЛИ 3 поступает на блок 4 памяти. Микрокомандой Мк2 из блока памяти по адресу, поступающему со счетчика 2 адресов команд, считы вается первая команда заданного технологического процесса, которая поступает по шине 30 в предварительный рагистр 35 команды блока сбязи с автооператорами (фиг. 5). Третьей командой Мк 3 производится проверка занятости автооператора. Если автооператор занят, то по шине 47 сигнал с триггера 31 занятости автооператор поступает на элемент И 21 блока управления фиг. 4) сигналом с его выхода взводится триггер 25, который, воздействуя на дешифратор 27 микрокоманд, запрещает дальнейшую выдачу микрокоманд. Если же автооператор свободен, то сигнал с триггера 31 блока связи с автооператорами фиг.5 отсутствует, триггер 25 блока управления (фиг;.4) не взводится и дешифра тор 27 микрокоманд продолжает работу Одновременно третья микрокоманда Мк сбрасывает триггер 22|. Четвертая микроь оманда Мк 4 посту пает на счетчики. 2j - 2; адресов ко-ч манд, на счетчики 8| - 8, времени, н диспетчерский пульт 1 и блок 5 связи с автооператорами. Счетчик работает следующим образом. При обслуживании автооператором подвески, закрепленной за первым каналом, на первый вход элемента И 79 счетчика 8| времени поступает сигнал первого канала. При поступлении на второй вход элемента И.79 микрокоманды Мк 4, сигналом с его выхода сбрасывается триггер 80, запрещая поступление на вычитгиощий счетчик 82 импульсов с генератора 7 импульсов времени по шине 78 и разрешается перепись в вычитающий счетчик 82 инфор мации о коде времени выдержки, посту пающей из блока связи с автйоператорами по шине 55. Как только автооператор перенес подвеску в позицию назначения, сигналом, поступающим с блока связи с автооператорами по шине 48, устанавливается в единичное состояние триг-, гер 80. Сигнал с его выхода, поступая на вход элемента И 81, разрешает уменьшение содержимого вычитающего счетчика 82 импульсами, поступающими с генератора 7 импульсов времени по шине 78. Начинается выдержка подвески в данной позиции. Как только содержимое вычитающего счетчика 82 становится равным нулю, т.е. выдержка окончена, дешифратор 83 нуля формирует сигнал, который поступая на второй вход элемента И 81, запрещает дальнейшее прохождение импульсов на вычитающий счетчик, а также по шине 29.. поступает в блок управления. На этом цикл работы устройства для программного управления по переносу подвески из одной позиции в другую заканчивается. Дополнительная шина 75 управления предназначена для выдачи в блок связи с автооператорами 5 команды на движение автооператора. Дополнительные шины 76 - 76; управления предназначены для считывания из блока 4 памяти в блок 5 связи с автооператорами команды, адрес которой считывается из одного из счетчиков 2 - 2, адресов команд, Эта команда .Содержит адрес позиции, в которой находится подвеска, имеющая наименьшее оставыее время выдержки . Сигнал на шине 75 и на одной из шин 764 - 76 появляется тогда, когда блок 9 сравнения закончил анализ оставшихся времен выдержки всех подвесок и выбрал канал,за которым закреплена подвеска, имеющая наименьшее оставшееся время выдержки, После того, как автооператор достигает данной позиции, блок 5 связи с автооператорами формирует сигнал, KOTOpiJit по шине 57 поступает в блок сравнения-и запрещает дальнейшую выдачу сигналов по шинам 75 и 76 . 76 ,По дополнительным информационны : шинам 59| - 59; из счетчиков 8| - 8; времени в блок 9 сравнения постоянно поступает информация об оставшихся временах выдержки подвесок,но обрабатывается эта информация (fT.e, выявляется номер счетчика, содержимое которого наименьшее, а значит и номер канала, за которым закреплена подвеска, имеющая наименьшее оставшееся выдержки) только при работе блока сравнения, т.е. тогда, когда ,у всех подвесок, находящихся на линии, идет выдержка времени. Блок памяти - обычное постоянное перепрогрс ммируемое запоминающее ус- i .тройство, которое программируется в зависимости от технологического процесса, В ячейках блока памяти последовательно, начиная с младших адресов, записан маршрут движения подвес ки вдоль гальванической линии согласно /технологическому процессу в виде команд, формат которых представлен н фиг. 3.
Выборка (/считывание информации из ячейки блока памяти, адрес которо задается счетчиком 2 - 2,адресов команд, производится либо по микрокоманде Мк 2, либо по сигналу поступающему из блока 9 сравнения по одной из шин 76 - 76j .
Сигналы со схем включения проводов вертикального и горизонтального движений автооператора поступают на обмотки реле, которые, срабатывая, своими замыкающими контактами включают двигатели соответственно вертикального и горизонтального движения автооператора. .
Рассмотрим работу блоков от микро команды МК 4.подробнее.
В диспетчерском пульте (фиг. 2-) Мк 4 поступает,на первые входы .элементов. И 11 - 11J , На вторые входы этих элементов по шинам 28 - поступают сигналы каналов. Если при обслуживании какого-либо канала например, первого) по шине 56 поступает признак последней команды, то сигнал с выхода элемента И 11 сбрасывает триггер 13f, лампочка 14| гаснет, сигнализируя об окончании технологического процесса и освобождении первого канала.
При поступлении Мк 4 на счетчики адресов команд, при обслуживании первого канала, производится увеличение содержимого счетчика 2( адреса команд на единицу, тем самым устанавливается адрес следующей команды.
В блоке связи с автооператорами (фиг. 4 микрокоманда Мк 4, пройдя через схему ИЛИ, 33, поступает на исполнительный регистр 34 команды, разрешая перепись в него кодов адресов позиций запроса -И назначения. Одновременно микрокоманда Мк 4 обнуляет счетчик 43 цикла и взводит тригге 31, который выдает по шине 47 сигнал о занятости автооператора.
Поступая на счетчики - 8, времени микрокоманда Мк 4, при обслуживании первого канала.разрешает перепись в счетчик 8 времени кода време ни . выдержки, который поступает по шине .55 с предварительного регистра 35 блока связи с автооператорами (фиг.4).
При поступлении тактового импульса tj сбрасывается триггер 26{ в блоке управления (фиг. 3). На этом цикл работы по обслуживанию первого канала заканчивается. Распределитель 23 каналов., получив так1овьтй импульс i , формирует разрешающий сигнал на шине 28i2, т.е. будет обслуживаться второй канал, затем третий и т.д.
Получив команду, блок связи с автооператорами работает автономно. Как было отмечено выше, микрокоманда Мк 4 обнуляет счетчик 43 цикла, при этом появляется сигнал на первом вы1:оде дешифратора 46 цикла, который через элементы ИЛИ 32 и 36 поступает на схему 41 включения привода ,горизонтального движения автооператора, которая по шине 51 включает привод горизонтального движения автооператора. Одновременно сигнал с выхода элемента ИЛИ 32 поступает на вход элемента И 38, пропуская из исполнительного регистра 34 команды код адреса позиции запроса через схему ИЛИ 42 на дешифратор 45 номера позиции, который по шинам 54 выдает информацию о номере позиции запроса. Начинается движение автооператора к позиции запроса. При достижении автооператором позиции на первый вход элемента И 44 поступает сигнал обратной связи Стоп по шине 50. На другом входе элемента И 44 имеется сигнал обратной связи Нижнее положение автооператора, поступающий по шине 49. Появившийся на выходе элэмента И 44 сигнал проходит на выход элемента И 40 и устанавливает счетчик 43 цикла в следующее состояние. Теперь появляется сигнал на втором выходе дешифратора цикла, который, поступая на первый вход элемента И 39, пропускает из исполни тельного регистра 34 команды код адреса позиции -назначения через схему ИЛИ 42 на дешифратор 45 номера позиции. Одновременно сигнал с вто., рого выхода дешифратора 46 цикла поступает на вход схемы 37 включения привода вертикального движения автооператора, а через элемент ИЛИ 36 на вход схемы 41 включения привода горизонтального движения автооператора, С первого выхода схемы 37 включения привода вертикального перемещения автооператора по шине 52 включается привод автооператора на движение вверх, а с второго йыхода - на схему включения привода горизонтального перемещения автооператора, запрещая выдачу сигнала на шину 51, При достижении автооператором верхнего положения по шине 53 поступает сигнал обратной связи Верхнее положение автооператора. При этом исчезает сигнал на шине 52, а также сигнал з.апрета на входе схемы 41, на выходе которой появляется сигнал включения привода горизонтального движения автооператора. При достижении автооператором позиции назначения на шине 50 появляется сигнал обратной связи Стоп по адресу, который поступает на вход элемента И 44 и вход схемы37, на первом выходе которой появляется сигнал на включение привода автооператора на движение вниз, С второго выхода схемы 37 на вход схемы 41 поступает сигнал запрета, при этом исчезает сигнал на шине 51, При достижении автоопер тором нижнего положения по шине 49 поступает сигнал обратной связи Нижнее положение автооператора, который через элемент И 44 и 40 устанавливает счетчик 43 цикла в третье состояние. Появившийся на третьем выходе дешифратора 46 цикла сигнал сбрасывает триггер 31 занятости автооператора, На этом автоном ный цикл, работы блока связи с автооператорами заканчивается, Одновременно сигнал с третьего -. выхода дешифратора цикла по шине. 48 поступает на счетчик 8 времени, раз решая , поступающим на другой его вход импульсам с генератора импульсов времени, уменьшение кода времени выдержки. Как только содержимое счетчи ка становится равным нулю, т.е. при окончании выдержки времени, он выдает сигнал, который по шине 29 поступает на блок управления фиг.4) где пройдя через элемент ИЛИ 19, взводи тригге 221 . Если есть сигнал на шине 16J, то в момент поступления тактового импульса и сигнала обслуживания первого канала появившийся на выходе элемента И 24 сигнал взводит триггер 26 , разрешающий, сигнал с выхода которого, поступая на дешифратор 27 микрокоманд, разрешает выдачумикрокоманд обслуживания первого канала. Вновь повторяет цикл обслуживания подвески, заключаю щийся в переносе ее в следующую согласно технологическому процессу no 1 зицип и выдержке ее в этой позиции. После считывания из блока памяти последней команды микрокомандой Мк в диспетчерском пульте (фиг.2) сбра сывается триггер 13J и гаснет лампоч ка 141, фиксируя окончание технологического процесса. Если на гальваническую линию загружено более одной подвески, т.е. заняты не один, а несколько каналов начинает работать блок сравнения (фиг.. По шинам 291 - 29, на элемент ИЛ 61 поступают сигналы с счетчиков 8 - 8j времени. Когда содержимое счетчиков не равно нулю, т.е. во вс счетчиках идет счет времени, сигна . на шинах 29 - 29,-отсутствуют. В эт случае на выходе инвентора 64 появляется разрешающий сигнал, поступаю щий на, первый вход элемента И 69. Сигнал на втором входе элемента И 69 поступающий с выхода инвентора 65, появляется в том случае, когда нет сигнала на шине 47, т.е. когда авто оператор свободен и триггер занято ти автооператор 31 в блоке связи с автооператорами (фиг.5) сброшен.Если эти условия выполняются, то с приходом по шине 28.) сигнала первого канала и тактового импульса i , на выходе элемента И 69 появляется сигнал, который взводит триггер 70. Разрешающий сигнсш с триггера 70 поступает на вход элементов И 60 - 604. Одновременно сигнал с выхода элемента И 69 поступает на регистр кода времени выдержки, устанавливая все его разряды в единичное состояние. При наличии разрешающего сигнала на шине 16f, что говорит о занятости первого канала, и поступлении сигнала первого канала и тактового импульса код оставшегося времени выдержки, поступающий по шине 59 .с счетчика 8 времени, через элементы И 60 ., ИЛИ 63, И 68 проходит на схему 73 сравнения. На второй вход схемы сравнения пос гупает содержимое регистра 72 кода времени выдержки. Так как содержимое регистра. 72 -Кода времени выдержки больше, то схема 73 сравнения выдает разрешающий сигнал на вход элемента И 67, В этом случае с приходом тактового импульса 1 элемент И 67 код времени выдержки, поступающий с элемента ИЛИ 63, переписывается в регистр 72, а в регистр 71 номера кана.ла записывается признак первого канала. С приходом сигнала второго канала по шине 28-2 и тактового импульса t2 на схему 73 сравнения через элементы И 602, поступает код оставшегбся времени выдержки с счетчика 8. На второй вход схемы 73 сравнения поступает с ре гистра 72 кода времени выдержки код оставшегося времени выдержки первого канала и, если он меньше, чем код. поступающий с элемента И 602, то, схема сравнения не выдает разрешающего сигнала, и содержимое регистров 71и 72 остается неизменным. Если же меньше код, поступающий по шине 592 счетчика 82 времени, то с приходом разрешающего сигнала с элемента 73 сравнения и тактового импульса Ьз этот код переписывается в регитр 72кода времени выдержки, а в регистр номера канала записывается при.знак второго канала. Так проверяется содержимое всех счетчиков 8| - 8 времени. После проверки содержимого счетчика 8 JI времени, соответствующего последнему ii -ому каналу, в регистре номера канала будет находится признак канала, у которого содержимое счетчика времени наименьшее. При поступлении сигнала последнего канала по шине 28 и тактового импульса с4 сигнал с выхода элемента И 62, пройдя через элемент ИЛИ 66
сбрасывает триггер 70, который снимает разрешающий сигнал с входов элемента И 60 - 60, , а через инвертор 74 подает сигнал на формирователь 77 одиночного импульса. Импульс с выхода формирователя 77 поступает на регистр 71 номера канала, который по шине 75 выдает сигнал на движение автооператора, а по одной из шин 16 - 76, - сигнал номера канала. Предположим, что наименьшее время выдержки имеет подвеска, которая закреплена за пятым каналом. В этом случае появляется сигнал .на шине 765 который поступает на счетчик 2 а;фесов команд и блок 4 памяти. Из блот ка памяти, по адресу, поступающему через элемент ИЛИ 3 со счетчика адресов команд, считывается команда и по шине 30 поступает на предварительный регистр 35 команды блока свя эй с автооператорами (фиг.4), Сигнал на движение автооператора по шине 75 поступает ч:ерез элемент ИЛИ 33 на исполнительный регистр 34 команды, разрешая с него перепись команды из предварительного регистра 35 команды, а также на элемент ИЛИ 32, сигнал с выхода которого поступает на вход элемента .И 38, разрешая перепис кода адреса позиции запроса из ис.полнительного регистра -34 команды через элемент ИЛИ 42 на дешифратор 45 номера позиции и через элемент ИЛИ 46 на схему 41 включение привода
-горизонтального движения автооператора. Дешифратор 45 по.шине 54 выдает автооператору сигнал о номере позиции, а схема 41 - сигнал включения привода горизонтального движения по шине 51.
Автооператор начинает движение. Когда автооператор достигает позиции запроса, на элемент И 44 по шине 50 поступает сигнал обратной связи Стрп по адресу. Так как на втором входе элемента И присутствует сигнал обратной связи Нижнее положение автооператора, то сигнал с его выхода по шине 57 поступает на вход формирователя 58 одиночного импульса блока сравнения (фиг.5) .
Импульс с выхода формирователя 58 одиночного импульса поступает на регистр 71 номера канала, запрещая выдачу сигналов по шинам 75 и 76 76, . На этом цикл работы блока сравнения заканчивается. При окончании выдержки времени у подвески, привязанной к пятому каналу, автооператор не нужно будет перемещаться к позиции запроса, а останется только перенести подвеску в следующуюсогласно технологическому процессу позицию. После этого цикл работы блока сравнения довторяется. Если во время работы блока сравнения у какойлибо подвески время выдержки кончилось, то сигнал с соответствующего этому каналу счетчйка времени по одной из шин 29jj - 25i поступает на блок сравнения (фиг. 5) и, пройдя через элементы ИЛИ 61 и 66 сбросит триггер 70, который запретит дальнейшую работу блока сравнения.
Таким образом, введение блока сравнения (фиг. 5} позволяет избежать передержку деталей в позиции запроса, которая возникает при движении автооператора к этой позиции, что приводит к повышению точности управления гальванической линией и к повышению производительности, линии в среднем на 10% за счет уменьшения времени цикла работы автооператора по переносу подвески из позиции в позицию, что в пересчете на экономический эффект составляет 21,5 тыс. руб. на одну линию.
IL
прамения I
«w П
cput.l
(риг. 2
фиг.З
(puz.f
57
58
75
7St,
71
76L
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для централизованногопРОгРАММНОгО упРАВлЕНия АВТООпЕРА-ТОРАМи | 1978 |
|
SU815716A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Авторское свидетельство СССР по заявке 3316760/18-24,кл.G 05 В 19/02, (прототип). | |||
