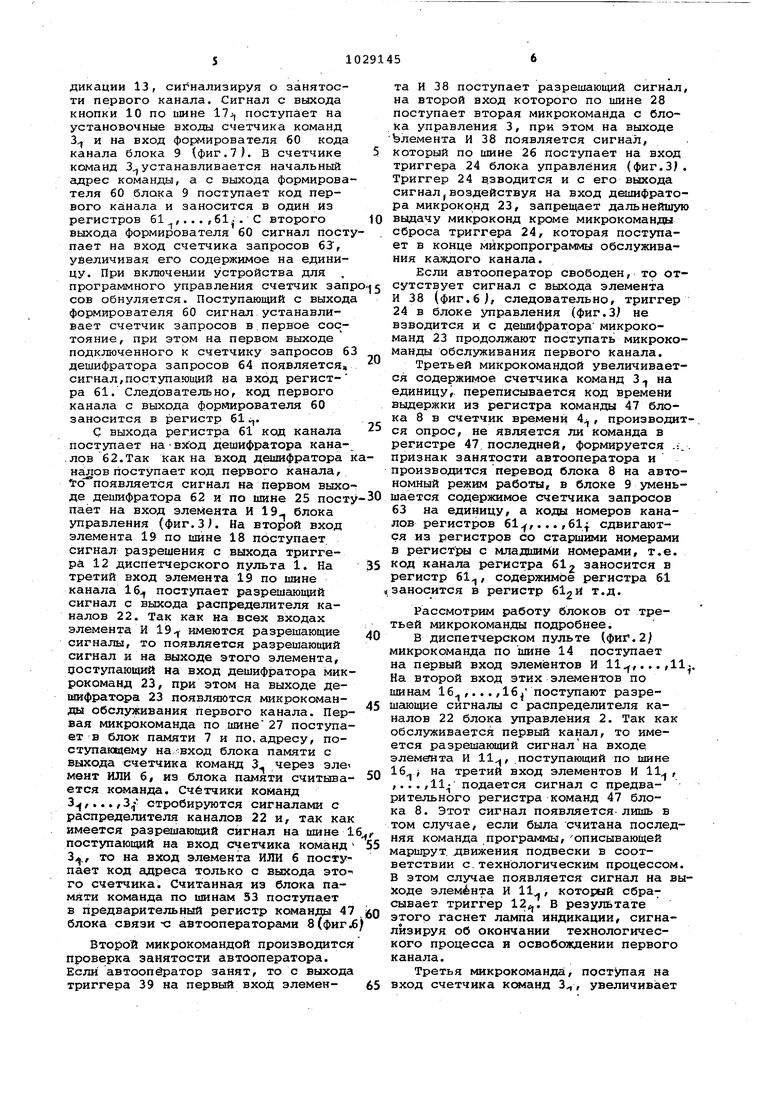
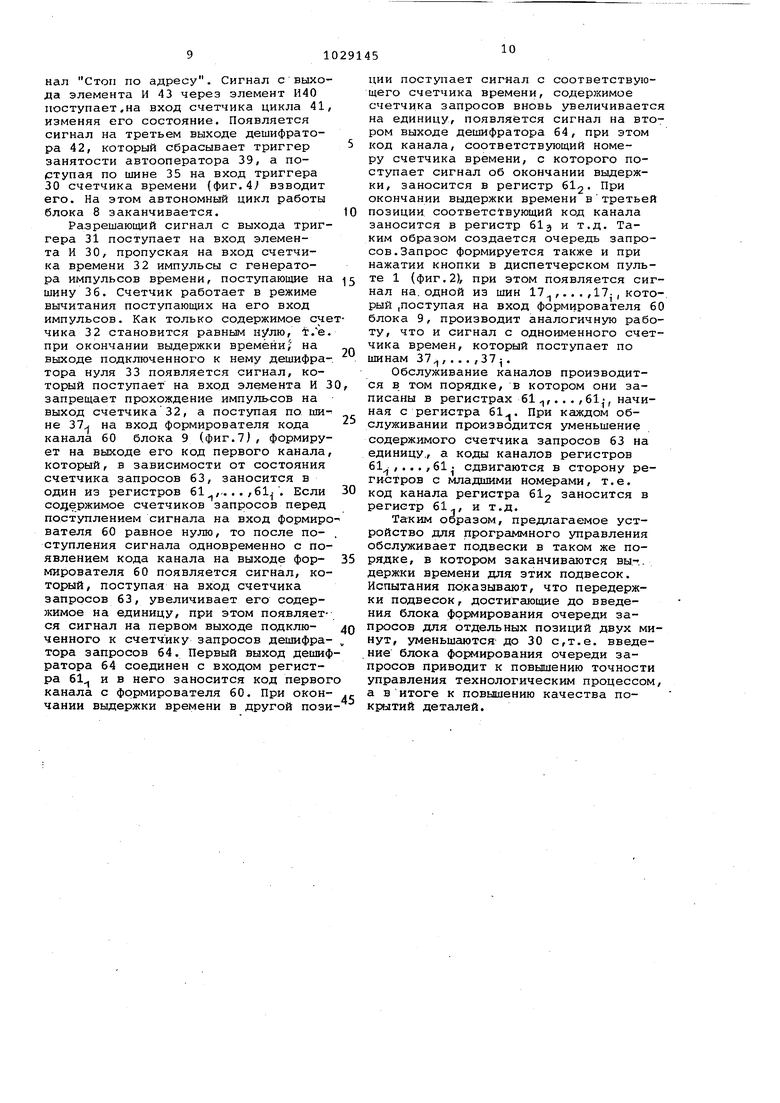
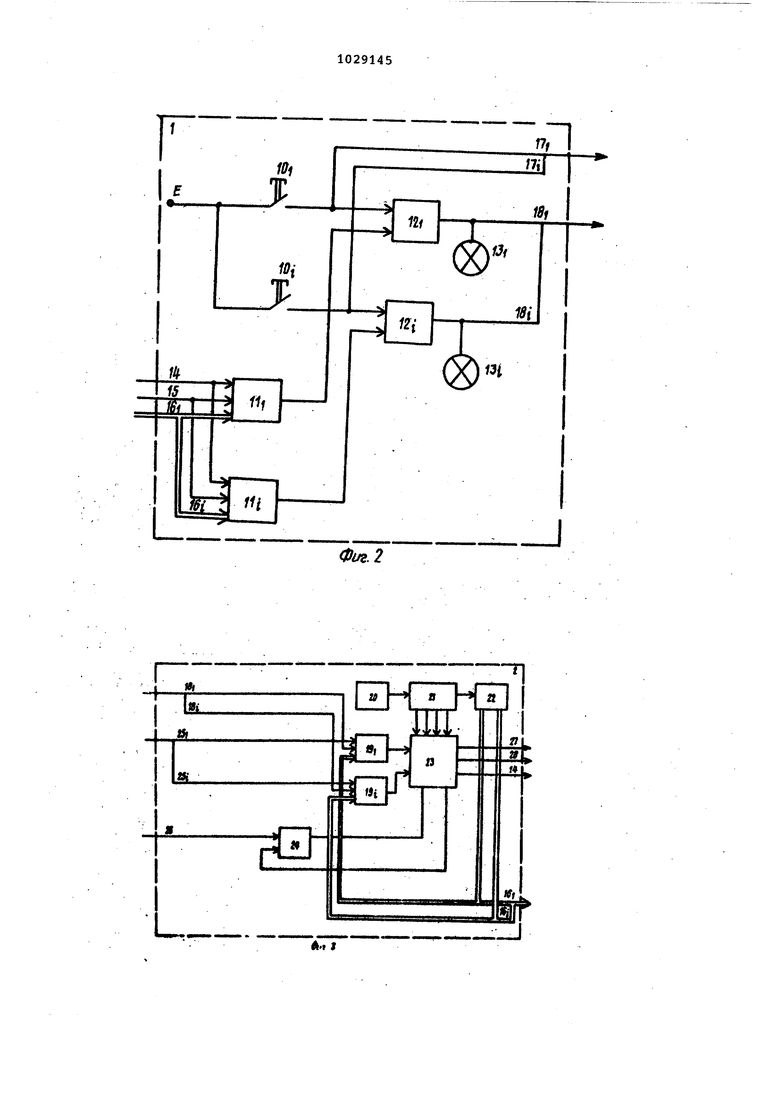
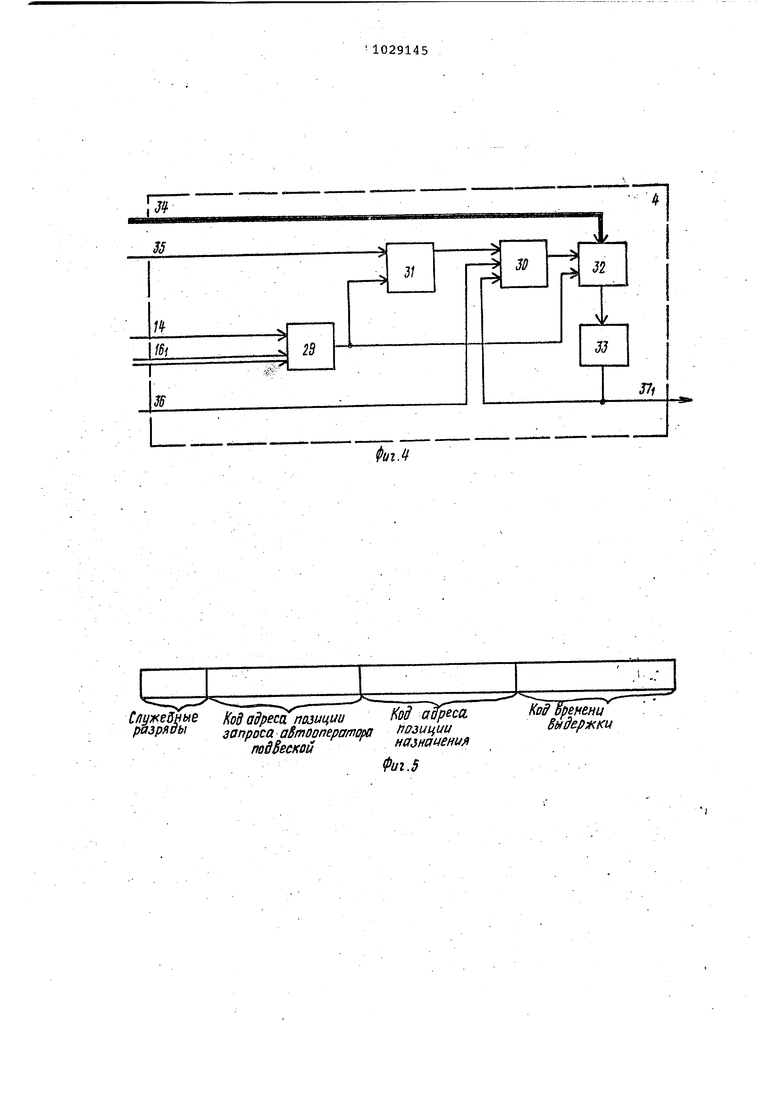
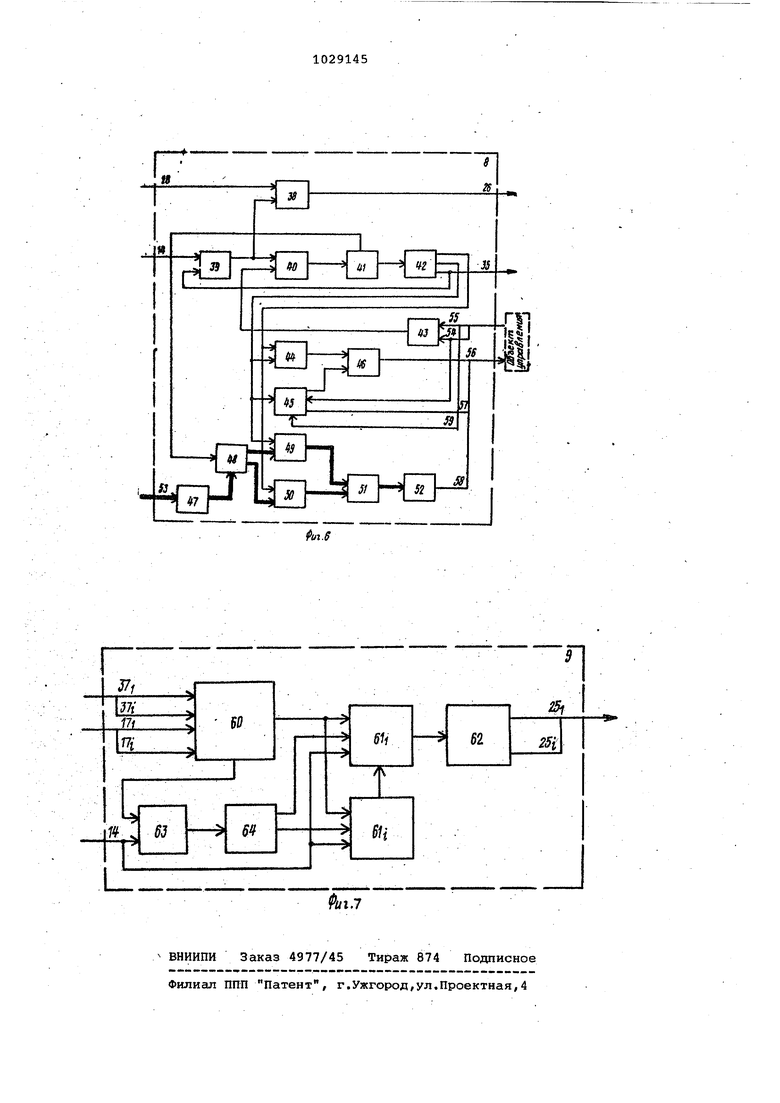
Изобретение относится к автрмат ческому управлению и может быть применено при автоматизации агрега ных многопроцессных гальванических линий. Известно устройство для программного управления многопроцессными гальваническими линиями, работающие по принципу обслуживания запросов, поступающих от подвесок с деталями в момент окончания выдержек времени в позициях запроса f Если к моменту освоболодения авт оператора выдержка закончилась в двух или нескольких позициях, то в этих устройствах при опросе зоны обслуживания данного автооператора обслуживается первый встретившийся запрос, независимо от порядка.в каком заканчивались выдержки в позициях. При таком способе обслуживания запросов на некоторых позициях возможны достаточно большие отклонения фактических выдержек от номинальных, т.е. показатели качества могут быть достаточно низкими . Наиболее близким к изобретению является устройство для централизованного программного управления автооператорами, содержащее диспетчер ский пульт, связанный через первый блок связи и блок управления с запо минающим узлом, а через первый переключатель команд для задания технологического процесса с блоком управления автооператорами, второй переключатель команд для задания основной ванны, связанный с блоком управления автооператорами и регист ром для счета времени основных ванн задающий генератор, импульсы с кото рого портупают на регистр для счета времени основных ванн, блок управле ния автооператорами, соединенный с блоком управления и регистром для счета .времени основных ванн, и второй блок связи с aBTOonepaTopaNm, связанный с блоком управле ния автооС0раторами и запоминающим узлом 2. Недостатком данного устройства, Котором принята канальная схема о©длуживания подвесок и каналы обсл жйваются последовательно от младших номеров к Старшим, является несовпа дени по рядка Окончания выдержек в прййциях и порядка обслуживания пояЁёсок, закрепленных за своими ка НадаМи.. Это может привести к значи:тельным передержкам в некоторых позициях, а следовательно, к снижению качества обработки деталей на гальванической линии. Цель изобретения - повышение точ ности управления технологическим пр цессом. Поставленная цель достигается те что в устройство для программного управления, содержащее генератор импульсов, блок управления, первым выходом соединенный с первыми входами счетчиков времени и последовательно соединенные диспетчерский пульт, счетчики команд, элемент ИЛИ, блок памяти и блок связи, первым выходом подключенный к первсэму входу диспетчерского пульта, второй вход которого соединен с вторым выходом блока управления, вторыми входами счетчиков времени и счетчиков команд, третьими входами псдключенных к первым входам счетчиков времени и третьему входу диспетчерского пульта, второй выход которого через блок управления соединен с вторым входом блока связи, второй выход которого подключен к второму входу блока управления, а третий выход - к третьим входам счетчиков времени, чгетвертыми входами соединенных с выходом генератора Импульсов, а пятыми входами - с четвертым выходом блока связи; четвертый выход блока управления подключен к второму входу блока памяти, введен блок формирования запросов, первым входом соединенный с выходами счетчиков времени, вторым входом - с третьим входом блока связи и вторым выходом блока управления, третьим входом - с первь1М выходом диспетчерского пульта, а выходом с третьим входом блока управления. Блок формирования запросов содержит формирователь кода канала, первым выходом через регистры соединенный с входом первого дешифратора, выходы которого соединены с выходом блока, второй выход формирователя кода канала через счетчик подключен к входу второго дешифратора, выходами соединенного с вторыми входами регистров, третьи входы которых подключены к второму входу счетчика и к второму входу блока, первый вход блока соединен с первыми входами формирователя кода канала, а .третий вход блока - с вторыми входами формирователе кода канала. На фиг.1 представлена функциональная схема устройства для програм1 1ного управления, на фиг.2 - то же, дис петчерского пульта, на фиг. 3 - то же, блока управления, на фиг.4 - то же, счетчика времени, на фиг.5 структура команды, на фиг.б - функциональная схема блока связи с автооператорами, на фиг. 7 - то же, блока, формирования очереди запросов. Устройство для программного управления (фиг.l содержит диспетчерский лульт 1, блок управления 2, счетчиреи команд 3 ,. ... , , (где i-число каналов ), счётчики времени 4,... ,4,, генератор импульсов времени 5, элеJMSHT ИЛИ б, блок памяти 7/ блок связи с автооператорами 8, блок фор мирования очереди запросов 9. Диспетчерский пульт (фиг,2) пред назначен для задания технологического процесса обработки деталей. Он состоит из кнопок 10,...,10|, элементов И 11 , . . . ,11 ,, триггеров 12,...,12 ламп индикации 13,... выхода 14 дешифратора блока управления, входа 15 пульта оператора, шины 16 - шины блока 2 управления, шины 17, второго входа 18 пульта оператора. Блок (фиг.З/ управления включает элементы И 19.,..,,19 , генератор тактовых импульсов 20, распре делитель тактовых импульсов 21, рас пределитель каналов 22, дешифратор микрокоманд 23, триггер 24. Микропрограг виы обслуживания каналов реализуются с помощью генератора такто вых импульсов 20, который подключен к входу последовательно соединенных распределителей тактовых импуль сов 21 и каналов 22, Выходы распределителя тактовых импульсов 21 подключены к входам дешифратора микрокоманд 23, который при наличии разрешающих сигналов с выхода какоголибо из элементов И 19.,. . . , при отсутствии запрета с триггера 24 выдает последовательность микрокоманд. Распределитель каналов последовательно формирует разрешающие сигналы, поступающие на шины каналов 16,... ,16, . Счетчики кома 3 ,. .., 3 формируют последовательность адресов команд программ по перемещению подвесок с деталями по гальванической линии в соответ,ствии с технологическими процессами, входы 25,, ...,25| блока, управления, выходы блока управления 27 и 28. Счетчики времени (фиг.4) предназ / ачены для обеспечения определенных выдержек времени подвесок в каждой Позиции. Счетчик времени состоит из элемента И 29 и 30, триггера раз решения счета 31, вычитающего счетчика 32, дешифратора нуля 33, инфор мационной шины 34,входа 35 счетчик времени,входа 36 счетчика времени, выхода 37 счетчика времени. Блак связи с автооператорами (фиг,6) служит для приема команд из блока памяти 7, их промежуточного хранения, обработки и формирования управляющих сигналов автооператорам Он включает элементы И 38, триггер элемент И 40 счетчик 41 цикла работы автооператора, дешифратор 42, эл менты Н 43 и ИЛИ 44, блок 45 включе ния привода вертикального движения автооператора, блок 46 включения пр вода горизонтального движения автооператора, предварительный регистр |Манды 47, исполнительный регистр ко манды 48, элементы И 49 и 50, элемент ИЛИ 51, де1иифратор номеров позиции 52, шины 53-59 управления. Блок формирования очереди запросов (фиг.7) последовательно в соответствии -с порядком окончания выдержек времени подвесок в позициях формирует запросы от подвесок и выдает их для обслуживания в блок управления. Блок формирования очереди запросов включает формирователь кода канала 60, регистры 61,...,61|, дешифратор каналов 62, счетчик запросов 63 и дешифратор запросов 64. Генератор импульсов времени 5 служит для формирования импульсов определенной частоты, используемых для счета времени выдержки подвесок в позициях. Элемент ИЛИ 6 обеспечивает .прием кодов адресов команд со счетчиков команд и выдачу их в блок памяти 7. Блок памяти 7 , предназначен для . хранения программ, описывающих маршруты движения подвесок по гальванической линии в соответствии с технологическими процессами. Команда по перемещению подвески из одной позиции в другую (фиг.5 содержит адрес позиции запроса, где находится подвеска, вызывающая автооператор, адрес позиции назначения, в которую данную подвеску необходимо перенести, длительность выдержки в этой позиции, а также дополнительные сведения (например признак последней команды ). Блок управления (фиг.З) предназначен для формирования управляющих, сигналов и организации синхронной работы всех функциональных узлов устройства. В блоке управления, построенному по микропрограммному принципу, принята канальная схема обслужива-ния подвесок с помощью автооператоров. За каждой подвеской закрепляется отдельный канал,; Все каналы обслуживаются в режиме разделения времени последовательно, начиная с младших номеров. Обслужив последний канал со старшим номером, блок управления переходит на обслуживание первого канала и т.д. Микропрограммы обслуживания каждого канала идентичны. Выполнение микропрограмг/1 обеспечивает вызов автооператора к позиции, перенос подвески в следующую позицию с заданием времени выдержки в ней. Устройство работает следующим образсм. На диспетчерском пульте 1 (фиг.2) нажатием кнопки задают маршрут движения подвески с деталями по гальванической линии в соответствии с требуемым технологически - процессом. Пусть нажата кнопка 10. Поступающий при нажатии кнопки сигнал взводит триггер 12 и загорается лампочка индикации 13, сигнализируя о занятости первого канала. Сигнал с выхода кнопки 10 по шине 17, поступает на установочные входы счетчика команд 3 и на вход формирователя 60 кода канала блока 9 (фиг.7 К В счетчике команд 3 устанавливается начальный адрес команды, а с выхода формирова теля 60 блока 9 поступает код первого канала и заносится в один из регистров 61,.,. ,61. С второго выхода формирователя 60 сигнал пост пает на вход счетчика запросов 63, увеличивая его содержимое на единицу. При включении устройства для программного управления счетчик aan сов обнуляется. Поступающий с выход формирователя 60 сигнал устанавливает счетчик запросов в первое сос тояние, при этом на первом выходе подключенного к счетчику запросов 6 дешифратора запросов 64 появляется, сигнал,поступающий на вход регистра 61. Следовательно, код первого канала с выхода формирователя 60 заносится в регистр 61. С выхода регистра 61 код канала поступает на вход дешифратора кана.лов 62.Так как на вход дешифратора налов поступает код первого канала, с появляется сигнал на первом выхо де дешифратора 62 и по шине 25 пост паёт на вход элемента И 19- блока управления (фиг.3. На йторой вход элемента 19 по шине 18 поступает сигнал разрешения с выхода триггера 12 диспетчерского пульта 1. На третий вход элемента 19 по шине канала 16 поступает разрешающий сигнал с выхода распределителя каналов 22. Так как на всех входах элемента И 19 имеются разрешающие сигналы, то появляется разрешающий сигнал и на выходе этого элемента, соступающий на вход дешифратора мик рокоманд 23, при этом на выходе дешифратора 23 появляются микрокоманда обслуживания первого канала. Пер вая микрокоманда по шине 27 поступа ет в блок памяти 7 и по, адресу, поступающему на. вход блока памяти с выхода счетчика команд 3- через эле мент ИЛИ 6, из блока памяти считыва стоя команда. Счётчики команд 3,...,3, стробируются сигналами с распределителя каналов 22 и, так ка имеется разрешающий сигнал на шине поступающий на вход счетчика команд 3., то на вход элемента ИЛИ б посту пает код адреса только с выхода это го счетчика. Считанная из блока памяти команда по шинам 53 поступает в предварительный регистр команды 4 блока связи-с автооператорами 8 (фиг Второй микрокомандой производитс проверка занятости автооператора. Если автоопёратор занят, то с выход триггера 39 на первый вход элемента И 38 поступает разрешающий сигнал, на второй вход которого по шине 28 поступает вторая микрокоманда с блока управления 3, при этом на выходе Ьлемента И 38 появляется сигнал, который по шине 26 поступает на вход триггера 24 блока управления (фиг.З. Триггер 24 в.зводится и с его выхода сигнал(Воздействуя на вход дешифратора микроконд 23, запрещает дальнейшую выдачу микроконд кроме микрокоманды сброса триггера 24, которая поступает в конце микропрограммы обслуживания каждого канала. Если автооператор свободен, то отсутствует сигнал с выхода элемента И 38 (фиг.б), следовательно, триггер 24 в блоке управления (фнг.З не взводится и с дешифратора микрокоманд 23 продолжают поступать микрокоманды обслуживания первого канала. Третьей микрокомандой увеличивается содержимое счетчика команд 3 на единицу,, переписывается код времени выдержки из регистра команды 47 блока 8 в счетчик времени 4jj , производится опрос, не является ли команда в регистре 47, последней, формируется .-..,. признак занятости автооператора и производится перевод блока 8 на автономный режим работы, в блоке 9 уменьшается содержимое счетчика запросов 63 на единицу, а коды номеров каналов регистров 61,...,61| сдвигаются из регистров со старшими номерами в регистры с младшими номерами, т.е. код канала регистра 612 заносится в регистр 61, содержимое регистра 61 заносится в регистр 612 ri Рассмотрим работу блоков от третьей микрокоманды подробнее. В диспетчерском пульте (фиг.2/ микрокоманда по шине 14 поступает на первый вход элементов И 11, ...,11. На второй вход этих элементов по шинам 16 ,... , поступают разрешающие сигналы с распределителя каналов 22 блока управления 2. Так как обслуживается первый канал, то имеется разрешающий сигнална входе элемента И И, .поступающий по шине 16 j на третий вход элементов И 11 , ,... , подается сигнал с предварительного регистра команд 47 блока 8. Этот сигнал появляется-лишь в том случае, если была считана последняя команда программы,описывающей маршрут, .движения подвески в соответствии с. технологическим процессом. В этом случае появляется сигнал на выходе элемента И И-, который сбра сывает триггер 12. В результате этого гаснет лампа индикации, сигнализируя об окончании технологического процесса и освобождении первого канала. Третья микрокоманда, поступая на вход счетчика 3, увеличивает его содержимое на единицу, тем самы в счетчике устанавливается адрес сл дующей команды. В счетчике времени 4 (фиг.-4-) тре рья микрокоманда по шине 14 постурает на первый вход элемента И 29. На второй вход этого элемента посту пает разрешающий сигнал по шине, канала 16. Сигнал с выхода элемента И 29 сбрасывает триггер 31 и его запрещающий сигнал, поступая на вхо элемента И не пропускает на вход этого элемента импульсы с гене ратора 5, поступающие на шину 36, Сигнал,, поступающий с выхода элемен та И 29 на вход вычитающего счетчика 32, разрешает запись в него пост пающего по шинам 34 кода.времени выдержки из предварительного регист ра команды 47 блока 8. . Поступая по шине 14 на исполнительный регистр команды 48 блока В (фиг.6), третья микрокоманда разреш ет перепись в него иэ предварительного регистра команды 47 кодов адре сов позиции запроса и позиции назн чения. Одновременно третья микрокоманда возводит, триггер 39 и обнуляе счетчик цикла 41. Сигнал с выхода триггера 39 поступает на элемент И разрешая подачу . сигналов на вход счетчика цикла 41 и на элемент И 38 разрешая выдачу по шине 26 сигнала занятости автооператора. В блоке формирования очереди запросов 9 Чфиг.7) третья микрокоманда, поступая на вход счетчика запро сов 63, уменьшает его содержимое, на единицу, а поступая на входа регистров 61 ,.. ,, 61} , сдвигает ко;цы номеров, каналов из регистровсо стар шими номерами в регистры с младшими номерами, тем самым производится подключение к дешифратору каналов 62 следующего канала для обслуживания, а вся очередь запросов продвигается на единицу в сторону регист ров с младЕиими номерами. Четвертая микрокоманда сбрасыйает триггер 24 блока управления 2, и цикл его работы по обслуживаникГ первого канала заканчивается. Vacfip делитель каналов 22, получив сигнал с выхода распределителя тактовых импульсов 21, формирует разрешающий сигнал на шине 16 .j. Да лее обслуживается второй канал, затем третий и т.д. Получив команду/ блок связи с автооператорами 8 (фиг.6 работает :автономно. Как было отмечено, третьей микрокомандой обнуляется счетчик цикла 41, при появляется сигнал на первом выходе дешифратора 42, который через элемент ИЛИ 44 поступает в блок 46 включения привода горизонтального движения автооператора, который по шине 56 включа ет привод горизонтального движения. . Одновременно сигнал с первого выхода. дешифратора 42, поступая на первый вход .элемента И 50, пропускает из регистра команды 48 код адреса позиции запроса через элемент ИЛИ 51 на дешифратор позиций 52, который по шинам 58 выдает информацию о .номере позиции запроса. Начинается движение автооператора в запрашиваемую позицию.. При достижении автобператором позиции на первый вход элемента И 43 по шине 54 поступает сигнал, обратной связи Стоп по адресу. На. втором входе элемента И 43 имеется сигнал обратной связи Нижнее положение автооператора, поступакяций по шине 55. Появляющийся сигнал на выходе элемента И 43 проходит на выход элемента И 40 и устанавливает счетчик цикла 41 в следующее состояние. Теперь появляется сигнал на втором выходе дешифратора 42, который, поступая на первый вход элемента И 49, пропускает из регистра команды 48 код адреса позиции назначения через элемент ИЛИ 51 на дешифратор позиций 52. Одновременно сигнал с второго выхода дешифратора 42 поступает на вход блока включения привода вертикального движения автооператора 45, а через элемент. ИЛИ 44 на вход блока включения привода горизонтального движения автооператора 46. С блока включения привода вертикального движения автооператора 45 по шине 57 включается.привод автооператора на движение вверх. С второго выхода блока 45 на вход схемы включения шривода горизонтального движения автооператора 46 поступает сигнал, запрещающий выдачу сигнала на шину 5.6. При достижении автооператоfiOM верхнего положения по шине 59 на вход блока 45 поступает сигнал обратной связи Верхнее положение автооператора, при этом исчезает сигнал на шине 57, а также сигнал запрета на входе схемы 46, на выходе которой появляется сигнал включения привода горизонтсшьного движения автооператора. При достижении автооператором позиции наз.начения появляется сигнал обратной связи Стоп по адресу, который 4ерез шину 54 поступает на вход элемента И 43 и вход блока 45, с выхода которого по шине 57 выдается сигнал включения привода автооператора на ;движение вниз. С второго выхода блока 45 на вход блока 46 поступает сигнал запрета, при этом исчезает сигнал на шине 56..При достижении автооператором нижнего положения появляется сигнал обратной связи Нижнее положение автооператора. Этот сигнал по шине 55 поступает на вход элемента И 43. На другом входе этого элемента-уже имеется сигнал Стоп по адресу. Сигнал с выхода элемента И 43 через элемент И40 поступает,на вход счетчика цикла 41, изменяя его состояние. Появляется сигнал на третьем выходе дешифратора 42, который сбрасывает триггер занятости автооператора 39, а портупая по шине 35 на вход триггера 30 счетчика времени (фиг.4; взводит его. На этом автономный цикл работы блока 8 заканчивается.
Разрешающий сигнал с выхода триггера 31 поступает на вход элемента И 30, пропуская на вход счетчика времени 32 импульсы с генератора импульсов времени, поступающие на шину 36. Счетчик работает в режиме вычитания поступающих на его вход импульсов. Как только содержимое счечика 32 становится равным нулю, т.е. при окончании выдержки времени на выходе подключенного к нему дешифратора нуля 33 появляется сигнал, который поступает на вход элемента И 3 запрещает прохождение импульсов на выход счетчика32, а поступая по шине 37 на вход формирователя кода канала 60 блока 9 (фиг.7), формирует на выходе его код первого канала, который, в зависимости от состояния счетчика запросов 63, заносится в один из регистров 61,-. . . ,. Если содержимое счетчиков запросов перед поступлением сигнала на вход формирователя 60 равное нулю, то после поступления сигнала одновременно с появлением кода канала на выходе формирователя 60 появляется сигнал, который, поступая на вход счетчика запросов 63, увеличивает его содержимое на единицу, при этом появляется сигнал на первом выходе подключенного к счетчику запросов дешифратора запросов 64. Первый выход дешифратора 64 соединен с входом регистра 61 и в него заносится код первог канала с формирователя 60. При окончании выдержки времени в другой позиции поступает сиг-нал с соответствующего счетчика времени, содержимое счетчика запросов вновь увеличивается на единицу, появляется сигнал на втором выходе дешифратора 64, при этом код канала, соответствующий номеру счетчика времени, с которого поступает сигнал об окончании выдержки, заносится в регистр 612- При окончании выдержки времени втретьей позиции соответствующий код канала заносится в регистр 61g и т.д. Таким образом создается очередь запросов. Запрос формируется также и при нажатии кнопки в диспетчерском пульте 1 (фиг. 2), при этом появляется сигнал на.одной из шин 17 ,...,17 который (Поступая на вход формирователя 60 блока 9, производит аналогичную работу, что и сигнал с одноименного счетчика времен, который поступает по шинам 37 , . ..,37 .
Обслуживание каналов производится в том порядке, в котором они записаны в регистрах 61 ,... ,, начиная с регистра 61. При каждом обслуживании производится уменьшение содержимого счетчика запросов 63 на единицу., а коды каналов регистров 61, ...,61.j сдвигаются в сторону регистров с младшими номерами, т.е. код канала регистра 612 заносится в регистр 61J, и т.д.
Таким образом, предлагаемое устройство для nporpaiMMHoro управления обслуживает подвески в таком же порядке, в котором заканчиваются вы.. держки времени для этих подвесок. Испытания показывают, что передержки подвесок, достигающие до введения блока фор 1ирования очереди запросов для отдельных позиций двух минут, уменьшаются до 30 с,т.е. введе.ние блока формирования очереди запросов приводит к повышению точности управления технологическим процессом, а витоге к повышению качества покрытий деталей.
ВВъект I управлений
Информационные шинЬ)
Адресные шины
. UitiHbi кана/1о§ Шины упраб/1ен1 фт,1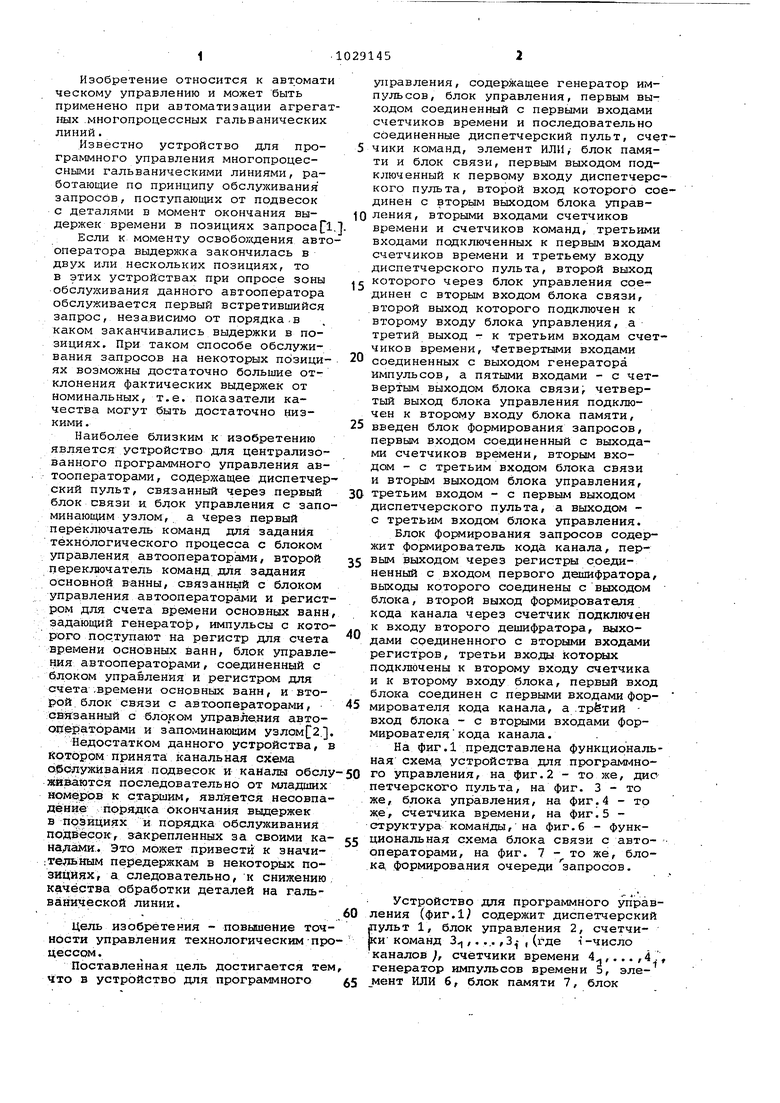
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для программного управления автоматическими линиями гальванопокрытий | 1983 |
|
SU1173393A1 |
| Устройство для программного управления | 1982 |
|
SU1057925A1 |
| Устройство для программного управления автоматическими линиями гальванопокрытий | 1981 |
|
SU1003023A1 |
| Устройство для программного управления | 1982 |
|
SU1067470A1 |
| Устройство для централизованногопРОгРАММНОгО упРАВлЕНия АВТООпЕРА-ТОРАМи | 1978 |
|
SU815716A1 |
| Имитатор канала | 1991 |
|
SU1839250A2 |
| Устройство для программного управления | 1979 |
|
SU842713A1 |
| Установка для управления автооператорами гальванических линий | 1978 |
|
SU749946A1 |
| Процессор | 1984 |
|
SU1247884A1 |
| Имитатор канала | 1990 |
|
SU1714606A1 |

1. УСТРОЙСТВО ДЛЯ ПРОГРАТУМНОГО УПРАВЛЕНИЯ, содержащее генератор импульсов, блок управления, первым выходом соединенный с первыми входами счетчиков времени и последовательно соединенные диспетчерский пульт, счетчики команд, элемент ИЛИ, блок памяти и блок связи, первым выходом подключенный к первому входу диспетчерского пульта, второй вход которого соединен с вторым выходом блока управления, вторыми входами счетчиков времени и счетчиков каманд, третьими входами под клзоченных к первым входам счетчиков времени и третьему входу.диспетчерского пульта, второй выход которого через блок управления соединен с вторым входом блока связи,, .второй выход которого подключен к второму входу блока/управления, 1тЪетий выход - к третьим входам счетчиков времени, четвертыми входами соединенных с выходом генератора импульсов, а пятыми входами с четвертым выходом блока связи, четвертый выход блока управления, подключен к второму входу блока памяти, отличающееся тем, что, с целью повышения точности управления устройства, в Него введен блок формирования запросов, первым входом соединенный с выходами счетчиков времени, вторым входом - с третьим входом блока связи и вторым .выходом блока управления, третьим входом - с первым выходом диспетчерского пульта, а вьлходом - с третьим входом блока управления. 2. Устройство по П.1, о т л и ч а: (Л ю щ е е с я тем, что блок формирования запросов содержит формирователь кода канала, первым выходом через регистры соединенный с входом первого дешифратора, выходы которого соединены с выходом блока:,- второй выход формирователя кода канала через счетчик подключен к входу второго дешифратора, выходами соедиto ненного с вторими входами регистров,, третьи входы которых подключены к со второму входу счетчика и к второму входу блока, первый вход блока сое-. динен с первыми входами формирова- i4 теля кода кансша, третий вход блоСП ка - с вторыми входами формирователя кода канала.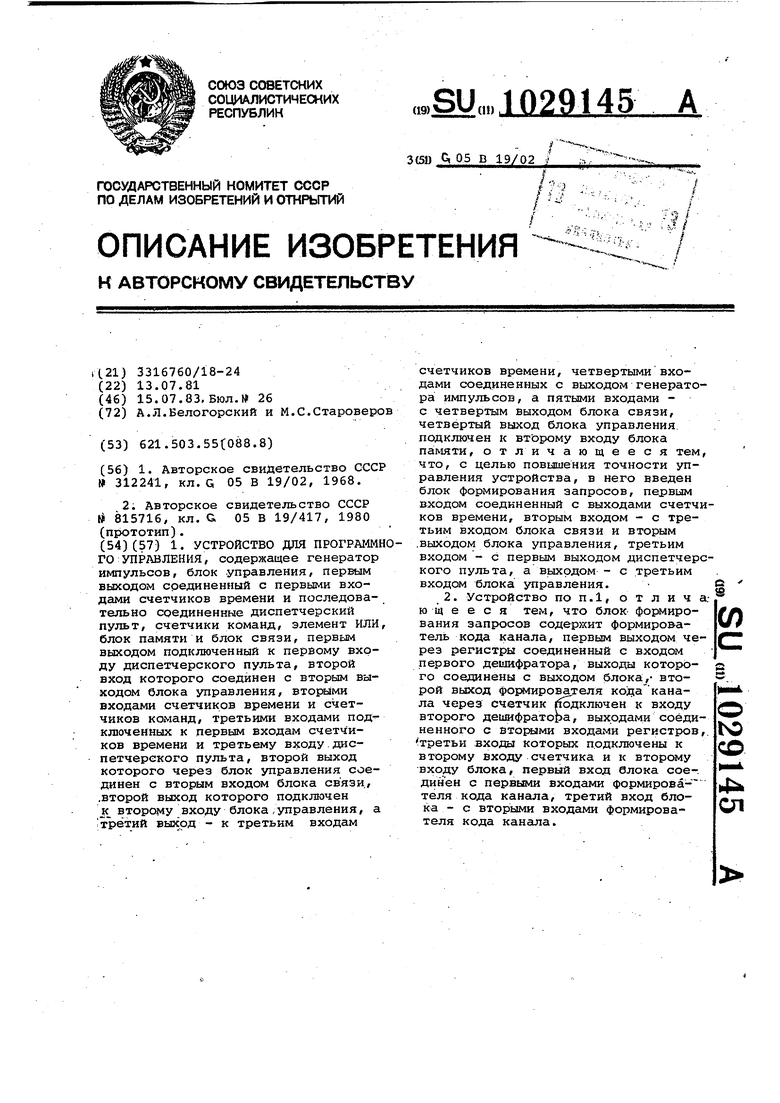
mSSecKOu на начени Фиг.5
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| СИСТЕМА ПРОГРАММНОГО УПРАВЛЕНИЯ УСТРОЙСТВОМ | 0 |
|
SU312241A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
