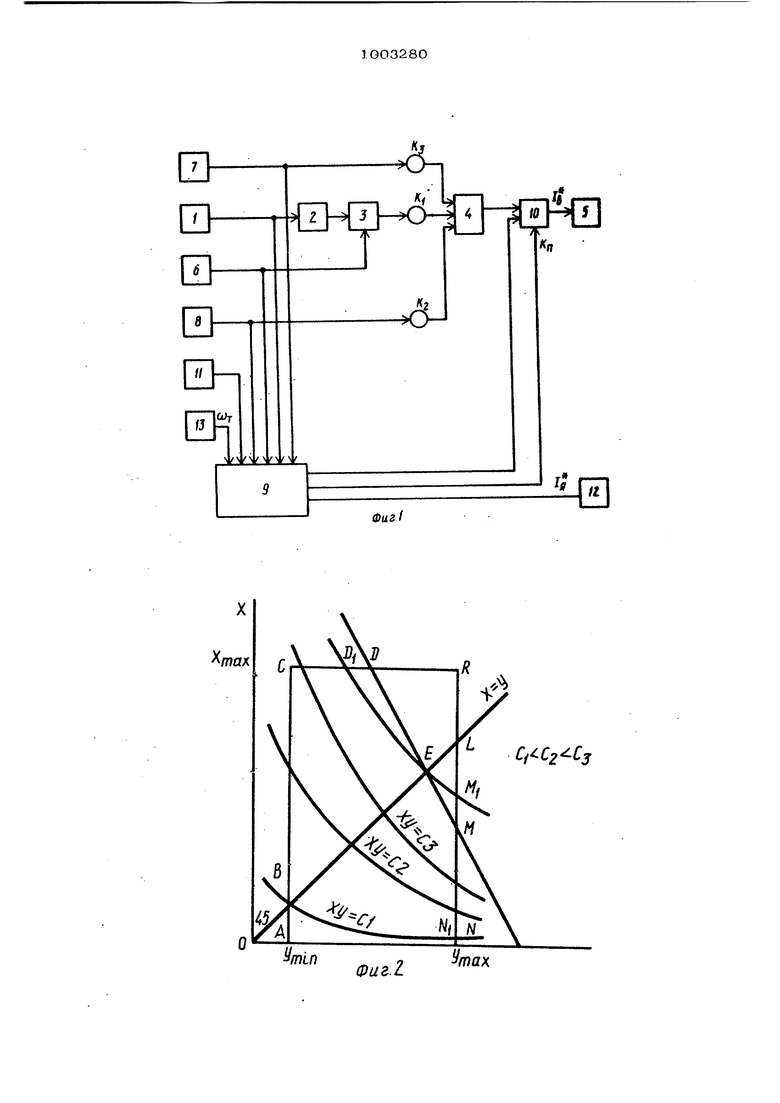
(54) ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА С Изобретение огносигся к электротехнике, в частности к регулируемому электро приводу постоянного тока, управляемому по цепи якоря и возбуншения двигателя постоянного тока, По основному авт. св. № 663 Об 2 извес тен электропривод постоянного тока с мини мизацией потерь в двигателе, содержащий датчики тока возбуждения и напряжения на якоре, последовательно соединенные .датчик скорости, функциональный преобразователь и блок перемножения с пoдключeнньDvI к его второму входу датчиком тока якоря, а также регу- . лятор возбуждения, к входу которого под ключен блок интегрирования, с тремя вхо дами, которые соединены соответственно с выходом блока перемножения, с выходом датчика напряжения на якоре и с выходом датчика тока возбуждения. Управление электроприводом осуществляется по закону .G)K44(4RJ--0(1) ПОТЕРЬ В ДВИГАТЕЛЕ МИНИМИЗАЦИЕЙ Оптимальность процесса по критерию минимума потерь обеспечивается выражением (I) только в установившемся режиме. Однако во многих электроприводах переходные процессы занимают значительное время по сравнению со временем всего цикла работы. Это приводит к необходимости учета и минимизации потерь не только в установившемся режиме, но в переходных процессах электропривода Cl. Недостатком известного устройства является невозможность обеспечения оптимального по потерям энергии динамического режима разгона электропривода. Цепь изобретения - повышение КПД путем минимизации потерь электроэнергии в переходном процессе разгона электропривода. Поставленная цель достигается тем, что в электропривод включены микропроцессор, ключ, регулятор тока якоря, датчик момента сопротивления и задатчик скорости, причем выходы датчиков тока возбуждения, скорости, тока якоря, напряжения на якоре, момента сопрогивления и задагчика скорсюги соединены с входа1ми микропроцессора, первый выход которого связан с входом регулятора тока якоря, два других выхода - с двумя входами ключа, третий вход которого соединен с выходом блока интегрирования а выход ключа соединен с входом регуля тора возбуждения. На фиг, I показйна блок-схема электропривода; на фиг. 2 - область определения функции потерь; на фиг. 3 -i блоксхема функционирования микропроцеЪсора, Электропривод (фиг. 1) содержит последовательно соединенные датчик I скорости, функциональный преобразователь 2, блок 3 перемножения, блок 4 интегрировании с коэффициентом интегрирования , связанный с регулятором 5 тока воз буждения датчик 6 тока якоря, соединенный с вторым входом блока 3 датчик 7 тока возбуждения, связанный с вторым входом блока 4 с коэффициентом интегрирования К , датчшс 8 напряжения на якоре,боединенный с третьтл входом блока 4 с коэффициентом интегрирования Kg, макропроцессор 9, ключ 10, датчик II момента сопротивления, регулятор 12 тока якоря и задатчик 13 скорости Выходы датчиков I, 6, 7, 8 и 9 и задатчика 13 соединены с входами микропроцессора 9, один выход которого связан с регулятором 12, два других выхода - с двумя входами ключа Ю, третий вход которого соединен с выходом блока 4, а выход ключа Ю связан с входом регуля тора 5, . Снижение полных потерь за время раз гона достигается за управления с более точнь1М определением минимума функции потерь Р ( , W ) с учетом момента статического сопротивления Mj4 а допустимой области изменения тока якоря Э и потока возбуждения Ф при ограничении напряжения в-цепи якоря. Задача оптимального управления переходнымпроцессом разгона от скорости омд до Шг. { ) по мит1имуму полных потерь в двигателе постоянного тока заключается; в выборе таких законов изменения тчэка якоря -Э и потока возбуждения |) , которые обеспечивают миними зацию энергии потерь, выцеляющихся в цви гателе за время Т переходного процесса Qrjflp cai (2) с учетом ограничений ,х где APj 4PJ АР(+ДРр+ЛР - полные потери в двигателе : ДР-j JQ RS - потеря в обмотке яко4Рсгп 6 (u) ) - потеря в ЛРй Л PR( Ф ) 31 RO - в обмотке возбуждения; ДР (tu ) - механические потери;3 5t - токи якоря, возбуждения :и магнитный поток двигателя, соответственно;Ly - скорость; Rd и Rg - сопротивление якоря и возбуждения двигателя. Уравнение механического равновесия двигателя М Ю Ф-ГАсСи;)о| (4) Задача минимизации ( 2) является задачей со свободным правым концом и незакрепленным временем.. Заменим t В ( 2) на uj из (4). Тогда, пренебрегая длительностью, электромагнитных процессов, получим задачу оптимального управления, свод5Ш1уюся к минимизации интеграла с фиксированными пределами ..J С - КГФ-- ( JлсJМинимум выражения (5) достап-ается при минимизации подынтегральной функции F { ) в текущий момент времени. Запишем выражение для F ( ) в ввде .,( F(-)F(x,v) ъ 2 2 X +:/Sp У -Лс ™ ,-. 3ef. ); c-ffiT /K; (u,) ,,А.0, x:y-yu,(,o в 5) полагается, что мапшгная сиетема машины не насыщена г. е. Ф -Зц , что не искажает сути задачи (кривую насыщи1ия учитываем ограничением тока возбунодения D из (3)). Область оп- ределения (фиг, 2) F( ) определяется ограничениями (3) и уравнением Umc(x x-{Ri V На фиг. 2 нанесены область определения F ( X , у ) - прямоугольник ACRN и линия . -X S const При Jt5( const минимум . F(x , у} при каждом фиксированном W достигается без учета ограничений при X .- V , откуда следует, что если минимум F ( х , у } достигается в точке, принадлежащей фигуре BCD, то эта точка должна лежать на отрезке BE бис сектрисы OU , Если F ( X, у ) имеет минимум в области , то эта точка лежит на ,отрезке АВ. И, наконец, если F( X| ) принадлежит области , то эта точка лежит на отрезке ДЕ. Если точка минимума лежит на отрезке BE, то при X :У получим FU,)C
откуда видно, что при X -р(
art ml п F (.х.,х) -J- с х2
т. е, точка минимум достигается при возможно большем значении произведения X У , т, е. на ограничениях (3) и (7) - точка Е.
ч
(е)Ус (е
4 mc,) 1О
dFU.y)
условия
-0. 0
полуЭх
X 42VX-K 0
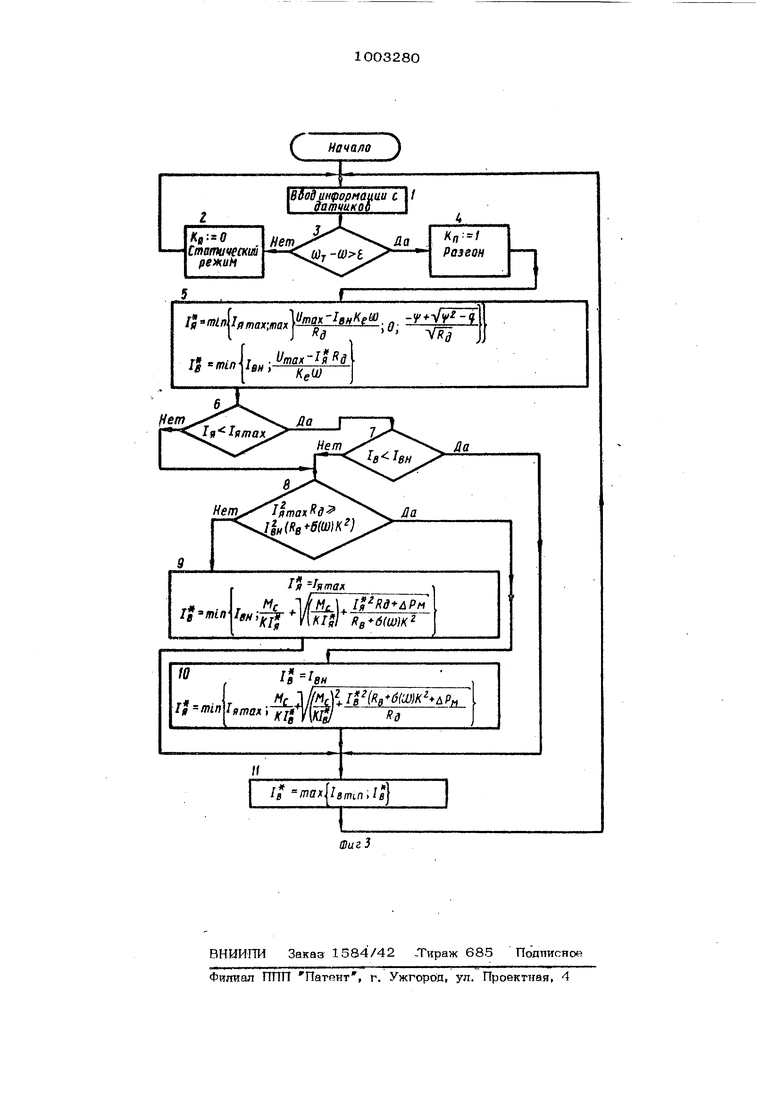
где 806 Если прямая (7) не пересекается с прямоугольником ACRN , т. е. при малых 00 и , то минимум F (х,) при вьтолнении ( Но) достигается в точке, принадлежащей отрезку RN . В том случае i motx Определим стационарную точку по X Var X v-2yu..x-:/(ч-Р) () J/TM tb).,x). Для режима разгона |($-)При возрастании w прямая (7) пересекает фигуру ACRN и конец достигает точки (12), что соответствует U -U При дaльнeйшavI возрастании to точка, доставляющая минимум F (5,У ), переходит на отрезок ДМ (U U.,,). Цля определения точки минимума в этом случае подставим в F (х, У ) выражение полученное из (7). Тогда, подставив (13) в ( 6), получим F.U,y)C l jTTdX -:i - nRdif/i e ( Для гонки минимума F { X, У ), пеяса щей на прямой (7) для разгона справедливы условия шах ma;t e X niin1 1КаТ i V ni1n( mcix (KeWВ эгрм случае управляющим воздействи ем является i, гак как (по цепи яко-. , ря (Изменяться не можег, поскольку ,)С . ЕСЛИ условие (Ю) не выполняется, е. прямая Х V пересекает грань CR , то из (6,9) х гпах Р Р гоне -Переходя в исходный переменный, алг ритм оптимального управления электродв гателем по минимуму потерь предетав шет собой блок-схему функционирования микропрсграЛШНого вьгчисга тельного бло ка (фиг. 3). Работа электропривода происходит в двух режимах: .статическом (сюда включено и тормоЖЕНие) и динамическом режиме разгона. Оптимизация статического режима 1и торможения) присходит согла но формуле (I). При этом в работе учас вуют датчик 7 гока возбужде1шя, датчик 1 скорости, датчик 6 тока якоря, датчик 8 напряжения на якоре, функциональный преобразователь 2, блок 3 перемножения, блок 4 интегрирования. Управляемы ключ Ю осуществляет автоматическое, переаключение управления со статическог режима на динамический при (л) - и 6 и обратно при 7/g для некоторой величины 6 О , выбираемой при настройке. У правление; ключом Ю осуществляется от микропроцессора 9 сигналом К (Kf, I - разгон электропривода, К О - статический режим). В режюу1е разгона происходят коммутации ключа Ю и управление процессом организуется микропроцессором 9, На выход микропроцессора 9 подаются сигналы с задатчика 13 скорости с датчиков 1, 6, 7, 8 и 11. Микроnpoixeccop У производит обработку сигналов согласно алгоритму (фиг. 3), На двух выходах микропроцессора 9 формируется сигнал задания тока возбуждения, который подается через ключ 10 на вход регулятора 5 тока возбуждения, и сигнал задания тока якоря, который подается на вход регулятора 12 тока якоря. Таким образом обеспечивается оптимальное по потерям энерпш функционирование электропривода как в статическом, так и в динамическом (разгон) режимах работы. Формула изобретения Электропривод постоянного тока с минимизацией потерь в двигателе по авт. св. N 663О52, отличающийся тем, что с; целью повышения его КПД путем минимизации потерь электроэнергии в переходном процессе, в него введены микропроцессор ключ, датчик момента сопротивления, регулятор тока якоря и задатчик скорости, причем выходы датчиков тока возбуждения, скорости, тока якоря, напряжения на якоре, момента. сопротивления и задатчика скорости соединены С входами: микропроцессора, первый выход которого соединен с входом регулятора тока якоря два других выхода - с двумя входами ключа, третий вход которого соединен с выходом блока интегрирования, а выход ключа соединен с входом регулятора возбуждения. Источники информации, принятые во внимание при экспертизе I. Авторское свидетельство СССР № 663052, кл, Н 02 Р 5/О6, 1977.
| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод постоянного тока с минимизацией потерь в двигателе | 1982 |
|
SU1107239A2 |
| Электропривод постоянного тока с минимизацией потерь в двигателе | 1984 |
|
SU1432705A2 |
| Электропривод постоянного тока с минимиза-циЕй пОТЕРь B дВигАТЕлЕ | 1977 |
|
SU847474A2 |
| Электропривод постоянного тока с минимизацией потерь в двигателе | 1977 |
|
SU758447A2 |
| Устройство оптимизации электропривода стенда для испытаний трансмиссий | 1988 |
|
SU1596305A1 |
| Реверсивный тиристорный электропривод с двухзонным регулированием | 1977 |
|
SU692043A1 |
| Электропривод постоянного тока с минимизацией потерь в двигателе | 1977 |
|
SU663052A1 |
| Электропривод постоянного тока с реверсивным преобразователем в цепи возбуждения | 1981 |
|
SU964935A1 |
| Система позиционирования с двухзонным регулированием скорости электропривода | 1991 |
|
SU1798765A1 |
| Электропривод постоянного тока с двухзонным регулированием скорости валков клети прокатного стана | 1986 |
|
SU1411911A1 |
о
Л
Фиг2
Г Начало )
IBSodaHgjopftauuu с I ffamvuKOo I
/.Я/|/д.,;ш.| Я У У°;а; ;..«j,.,;J(j
W
я в«
г - Jrai rS
йтая; rrM/i / Р;,
/г
emtn /fl
/в . M
