(54) ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА С МИНИМИЗАЦИЕЙ
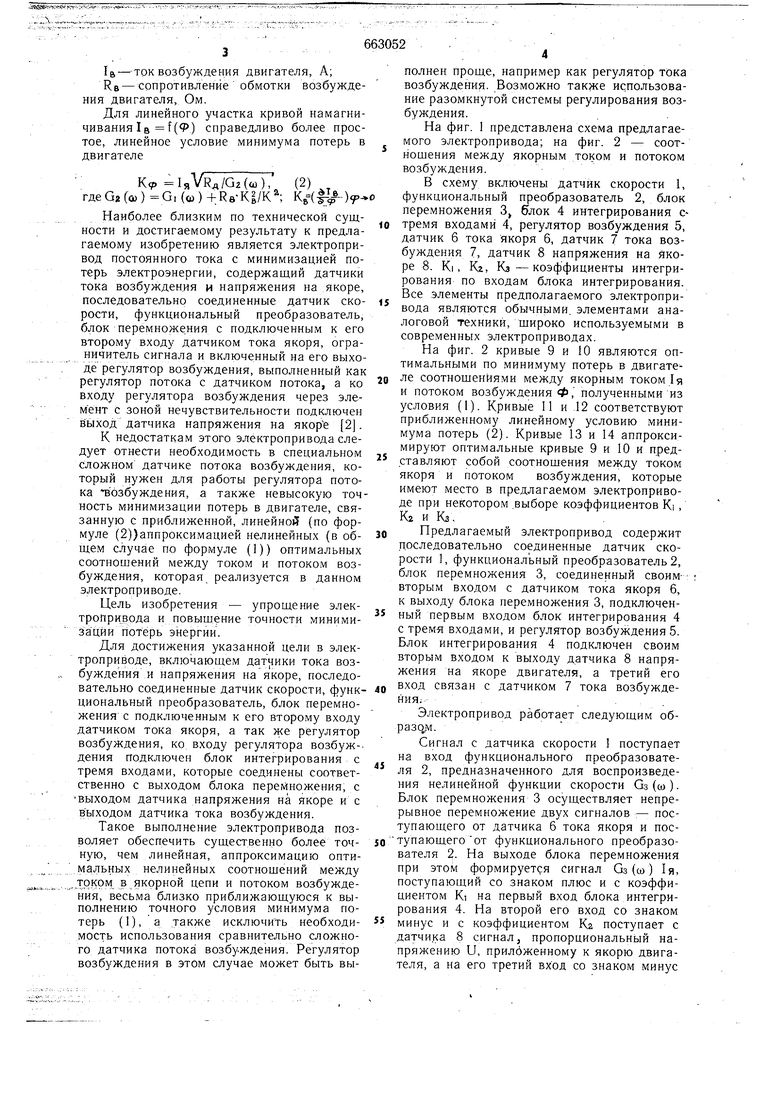
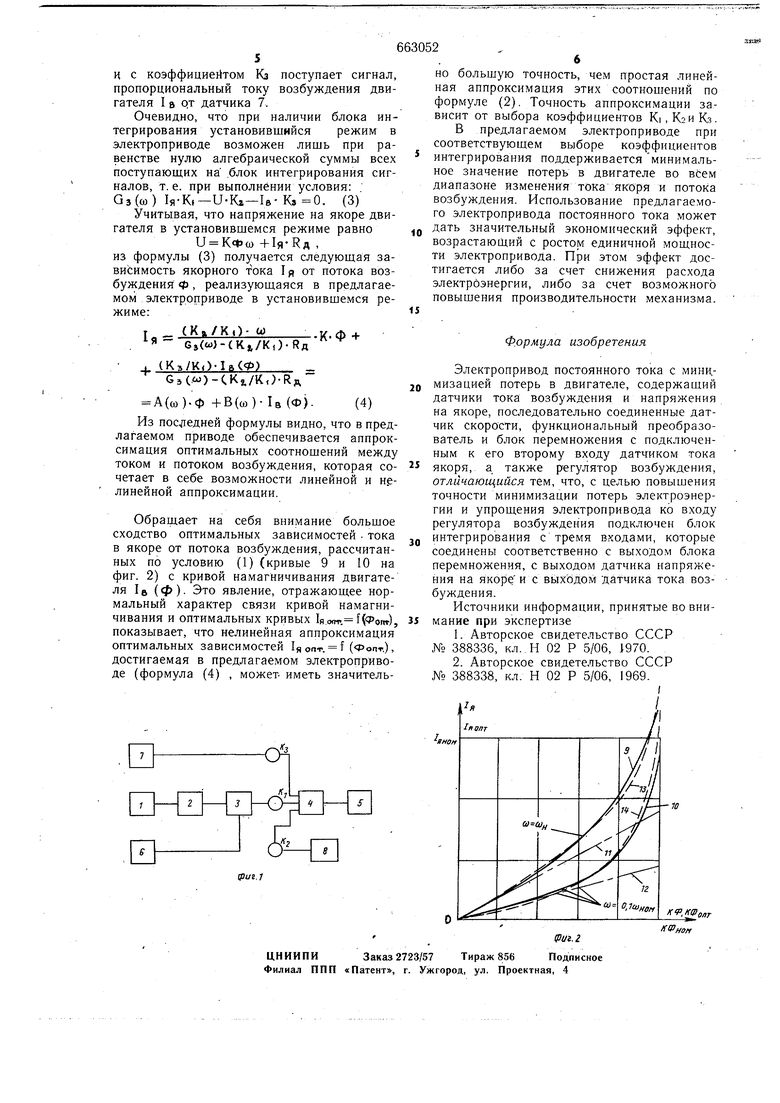
ПОТЕРЬ В ДВИГАТЕЛЕ Ift-ТОК возбуждения двигателя, А; Re - сопротивление обмотки возбуждения двигателя, Ом. Для линейного участка кривой намагничивания IB ЦФ) справедливо более простое, линейное условие минимума потерь в двигателе («), (2) гдeG2(й))G,(ш)+RвK|/K )-у,,„ Наиболее близким по технической сущ™.. °Л™1 °7 .. гаемому изобретению является электропривод постоянного тока с минимизацией потерь электроэнергии, содержащий датчики тока возбуждения и напряжения на якоре, последовательно соединенные датчик скорости, функциональный преобразователь, блок перемноже ния с подключенным к его второму входу датчиком тока якоря, ограничитель сигнала и включенный на его выхо.;„ fДvP..гTrrяЧ lr регулятор потока с датчиком потока, а ко входу регулятора возбуждения через элемент с зоной нечувствительности подключен выход датчика напряжения на якоре 2. К недостаткам этого электропривода следует отнести необходимость в специальном сложном датчике потока возбуждения, который нужен для работы регулятора потока возбуждения, а также невысокую точность минимизации потерь в двигателе, связанную с приближенной, линейной (по формуле (2))аппроксимацией нелинейных (в общем случае по формуле (1)) оптимальных соотношений между током и потоком возбуждения, которая, реализуется в данном электроприводе. Цель изобретения - упрощение электропривода и повышение точности минимизации потерь энергии Для достижения указанной цели в электроприводе, включающем датчики тока возбуждения и напряжения наякоре, последовательно соединенные датчик скорости, функциональный преобразователь, блок перемножения с подключенным к его второму входу датчиком тока якоря, а так же регулятор возбуждения, ко, входу регулятора возбуждения подключен блок интегрирования с тремя входами, которые соединены соответственно с выходом блока перемножения, с выходом датчика напряжения на якоре и с вьгходом датчика тока возбуждения. Такое выполнение электропривода позволяет обеспечить существенно более точную, чем линейная, аппроксимацию опти.мальных нелинейных соотношений между .током в якорной цепи и потоком возбуждения, весьма близко приближающуюся к выполнению точного условия минимума потерь (1), а .также исключить необходимость использования сравнительно сложного датчика потока возбуждения. Регулятор возбуждения в этом случае может быть выполней проще, например как регулятор тока возбуждения. Возможно также использование разомкнутой системы регулирования возбуждения. На фиг. I представлена схема предлагаемого электропривода; на фиг. 2 - соотношения между якорным током и потоком возбуждения. В схему включены датчик скорости 1, функциональный преобразователь 2, блок перемножения 3 блок 4 интегрирования с регулятор возбуждения 5, J.,lIJJlVy l.ri/t 1.Ч/tllVyjVi Hl3il.llJIiLJ JL ll:Xifi датчик е тока якоря е, датчик 7 тока возбуждения 7, датчик 8 напряжения на якоре 8. К|, Кг, Кз-коэффициенты интегрирования по входам блока интегрирования. Все элементы предполагаемого электропривода являются обычными, элементами аналоговой техники, широко используемыми в современных электроприводах. На фиг. 2 кривые 9 и 10 являются оптимальными по минимуму потерь в двигателе соотнощенйями межУ якорным током 1я и потоком возбуждения Ф, полученными из условия (1). Кривые 11 и -12 соответствуют приближенному линейному условию минимума потерь (2). Кривые 13 и 14 аппроксимируют оптимальные кривые 9 и 10 и представляют собой соотношения между током якоря и потоком возбуждения, которые имеют место в предлагаемом электроприводе при некотором выборе коэффициентов Ki , Кг и Кз. Предлагаемый электропривод содержит последовательно соединенные датчик скорости 1, функциональный преобразователь 2, блок перемножения 3, соединенный своимвторым входом с датчиком тока якоря 6, к выходу блока перемножения 3, подключен™й первым входом блок интегрирования 4 с тремя входами, и регулятор возбуждения 5. интегрирования 4 подключен своим горъш входом к выходу датчика 8 напря « °Р двигателя, а третий его вхад связан с датчиком 7 тока возбуждеЭлектропривод работает следующим обpa3ojvi. Сигнал с датчика скорости 1 поступает на вход функционального преобразователя 2, предназначенного для воспроизведения нелинейной функции скорости Оз(а)). Блок перемножения 3 осуществляет непрерывное перемножение двух сигналов :- поступающего от датчика 6 тока якоря и поступающего от функционального преобразователя 2. На выходе блока перемножения при этом формируется сигнал Оз (о)) 1я, поступающий со знаком плюс и с коэффициентом Ki на первый вход блока интегрирования 4. На второй его вход со знаком минус и с коэффициентом Ка поступает с датчи.ка 8 сигнал, пропорциональный напряжению и, приложенному к якорю двигателя, а на его третий вход со знаком минус
| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод постоянного тока с минимизацией потерь в двигателе | 1977 |
|
SU758447A2 |
| Электропривод постоянного тока с минимиза-циЕй пОТЕРь B дВигАТЕлЕ | 1977 |
|
SU847474A2 |
| Электропривод постоянного тока с минимизацией потерь в двигателе | 1982 |
|
SU1107239A2 |
| Устройство для управления электродвигателем с минимизацией потерь | 1980 |
|
SU892633A1 |
| Электропривод постоянного тока с минимизацией потерь в двигателе | 1984 |
|
SU1432705A2 |
| Электропривод постоянного тока с минимизацией потерь в двигателе | 1981 |
|
SU1003280A2 |
| Электропривод постоянного тока | 1984 |
|
SU1228208A2 |
| Устройство для управления электроприводом постоянного тока | 1978 |
|
SU736320A1 |
| Электропривод постоянного тока | 1983 |
|
SU1115188A1 |
| Устройство управления электроприводом постоянного тока с реверсивным регулятором в цепи возбуждения | 1976 |
|
SU574840A2 |
