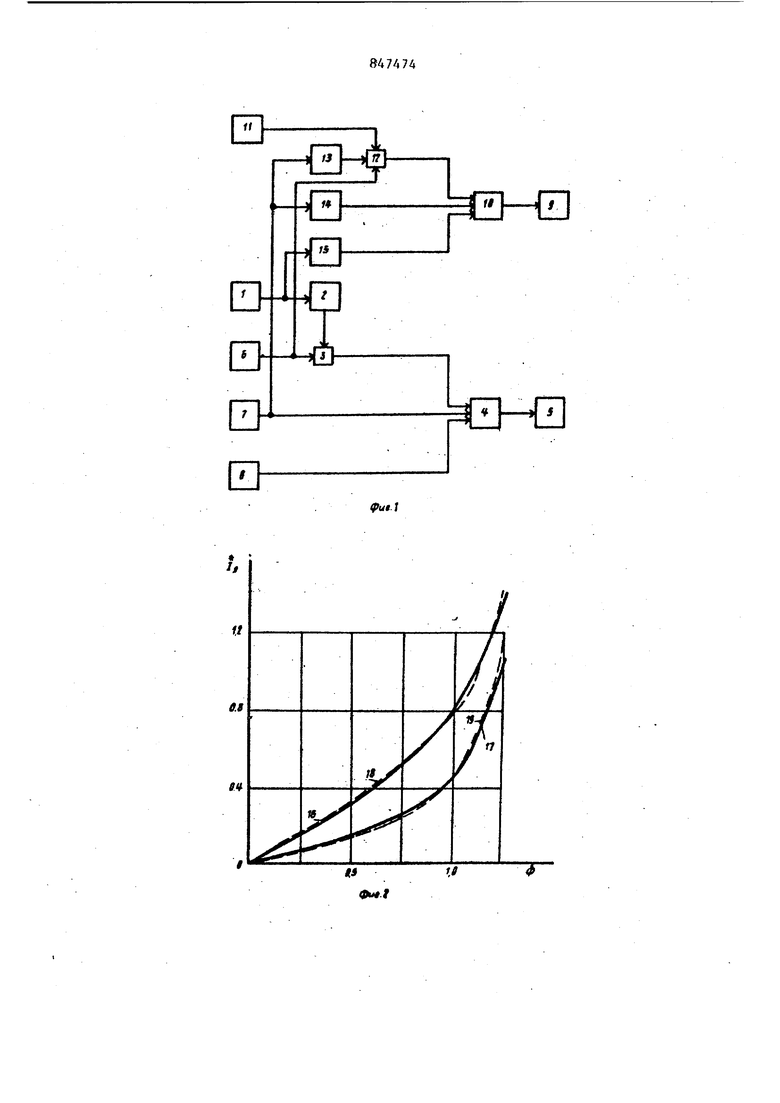
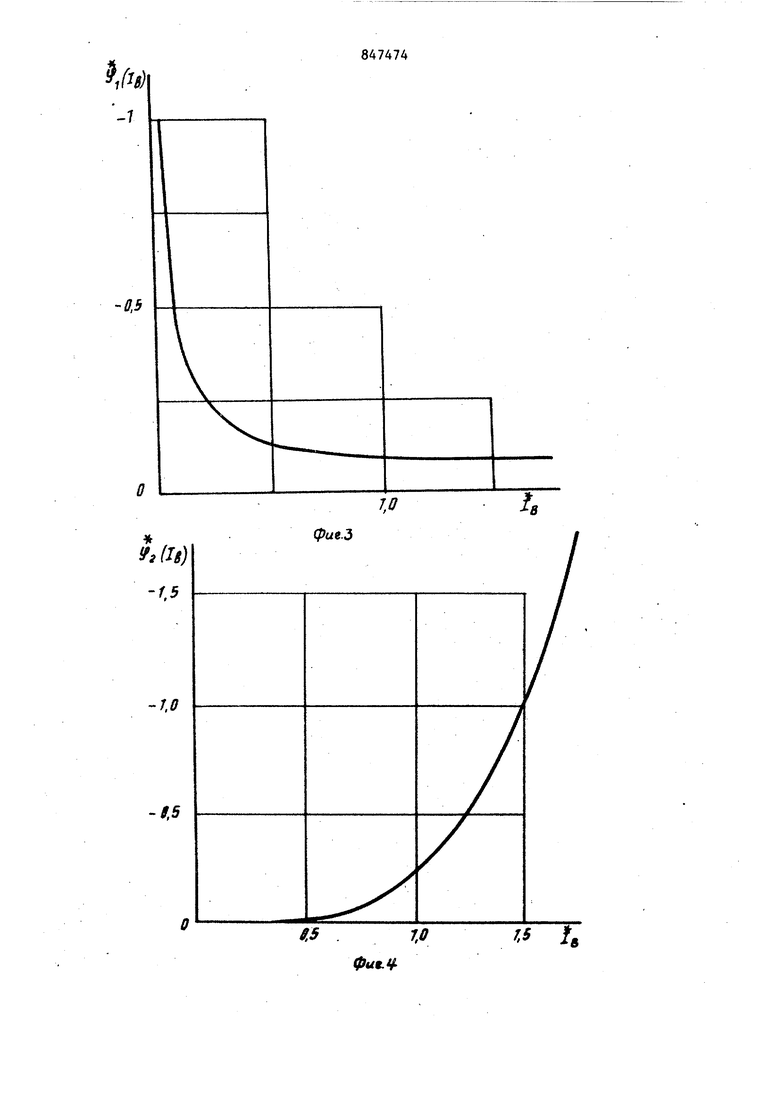
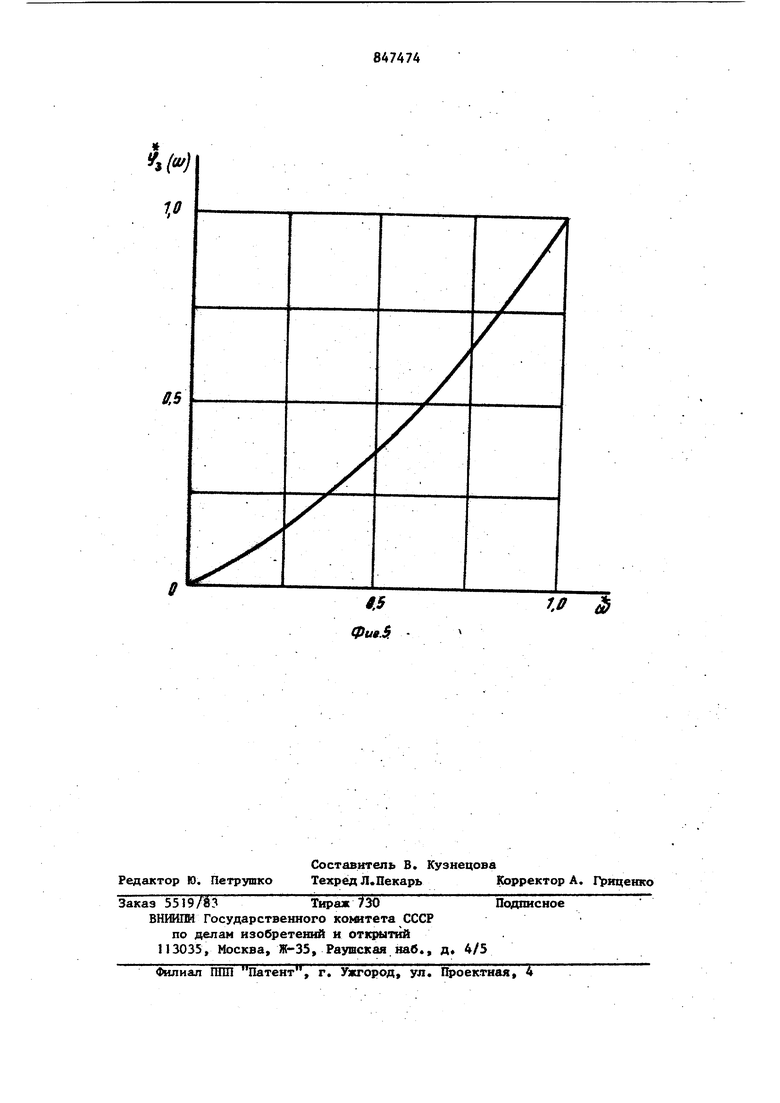
Изобретение относится к регулируе мому электроприводу постоянного тока и может быть использовано в электроприводах различных машин и механизмов, например в электроприводах прокатных станов, в судовых и транспорт ных электроприводах. По основному авт.св. № 663052 известен электропривод постоянного тока, в котором за счет поддержания оптимального соотношения между током в якорной цепи и потоком возбуждения обеспечивается минимизация потерь энергии в установившихся режимах и в переходных процессах. Известный электропривод содержит датчик тока возбуждения и напряжения на якоре, последоватально соединенные датчик скорости, функциональный преобразователь и блок перемножения с подключенным к его второму входу датчиком тока якоря, а также регулятор возбуткдения, ко входу которого подключен блок интегрирования с тремя дами, которые соединены соответенно с выходом блока перемножения, ходом датчика напряжения на якоре выходом датчика тока возбутвдения. том электроприводе обеспечиваетприближенное выполнение условия мума потерь в двигателе к.ча)(,о,10 jj - угловая скорость, с Oq - ток в якорной цепи двигателя. А; внутреннее сопротивление якорной цепи двигателя. Ом; Vi - конструктивный коэффициент двигателя; ф - поток возбуждения двигателя, Вб: C;i(u))- переменный коэффициент, характеризую ций зависимость потерь стали от скорости QCu))--uPcT/KVi 3 - 8 UP( - потери в стали двигателя,Вт 3« - ток возбуждения двигателя, Тг - сопротивление обмотки возбуждения двигателя. Ом. Величина энергии потерь, выделяющихся в двигателе в течение переходного процесса измене1шя скорости, зависит от того, по какому закону осуществляется это изменение скорости во времени. Минимум энергии потерь в двигателе за время переходного процесса достигается, если при любой скорости в любом моменте статического сопротивления М.. на валу двигателя так выбирать значения тока в якорной цепи и потока возбуждения двигателя (а значит и момента, разви ваемого двигателем), чтобы при выпол нении условия С1) одновременно вьшол нялось следующее условие: АР.--Л.Р. .др I U - механические потери в двигателе Вт; момент статического сопротив ления на валу двигателя, Нм. Если момент статического сопротив ления MC является произвольной, в том числе случайной функцией времени то зависимость оптимального потока возбуждения от угловой скорости двигателя и момента сопротивления на его валу Фопт..(Mc,J) приводится к виду a35,3,(3g,V)V)-0, (3) где it3g,) 7UeV-3Svf feKW blv Ф,,М-йР„ех(« Зная Cdg,) ,).) , .CtJ) и параметры двигателя по формулам (3) и С можно рассчитать оптимальные значеНИН потока возбуждения и тока, который должен протекать в якорной цепи двигателя в переходном процессе как функцию скорости двигателя и момент сопротивления на его валуЦ. Однако в .-.известном электроприво де в переходном процессе не обеспечивается автоматическое формировани оптимальной по минимуму потерь энер диаграммы изменения скорости двигателя во времени. Цель изобрете1шя - обеспечение автоматического формирования оптимальной по минимуму энергии потерь диаграммы изменения скорости двигателя во времени при произвольном моменте сопротивления на его валу. Указанная цель достигается тем, что в электропривод введены задатчик регулируемой интенсивности изменения скорости двигателя, первый, второй и третий нелинейные блоки, а также последовательно соединенные датчик статического момента, блок перемножения трех сигналов, соединенный своим вторым входом с датчиком тока якоря, и блок интегрирования.с тремя входами с ограничением выходного сигнала, причем первый и второй нелинейные блоки соединены входами с датчиком тока возбуждения, а выходами включены соответственно на третий вход блока перемножения и второй вход блока интегрирования, третий нелинейный блок соединен входом с датчиком скорости, а выходом - с третьим входом блока интегрирования, выход которого включен на регулирующий вход задатчика интенсивности. Такое выполнение электропривода позволяет в переходных процессах при произвольно изменяющемся моменте статического сопротивления автоматически формировать оптимальную по минимуму энергии потерь диаграмму изменения скорости двигателя во времени. На фиг.1 представлена схема предлагаемого электропривода; на фиг.2 соотнощения между якорным током и потоком возбуждения на фиг.3,4 и 5 типичный вид нелинейных функций, воспроизводим первым, вторым и третьим нелинейными блоками соответственно . Электропривод (фиг.1) содержит датчик 1 скорости, функциональный преобразователь 2j блок 3 перемножения, блок 4 интегрирования с тремя входами; регулятор 5 возбужде- НИН, датчик 6 тока якоря, датчик 7 тока возбуждения, датчик 8 напряжения на якоре, задатчик 9 регулируемой интенсивности изменения скорости привода, блок 10 интегрирования с тремя входами с ограничением выходного сигнала, датчик 11 статичес5кого момента, блок 12 перемножения трех сигналов, первый 13,второй 14 и трети1 15 нелинейные блоки. Кривые 16 и 17 (4иг.2) являются оптимальными по минимуму потерь в двигателе соотношениями между якорным током и потоком возбуткдения, полученными из условия (1) при разных скоростях двигателя. Кривые 18 и 19 аппроксиMiipyTOT оптимальные зависимости 16 . и 17 и представляют собой соотношения между током якоря и потоком возбуждения, которые имеют место в предлагаемом электроприводе при некотором выборе коэффициентов Типичные нелинейные зависимости ) , ,(и) , воспроизводимые первым, вторым и третьим нелинейными блоками соответственно (фиг.3-5),рассчитаны по известным параметрам конкретного двигателя. В предлагаемом электроприводе содержащем последовательно соединенные датчик 1 скорости, функциональный преобразователь 2, блок 3 перемножения, соединен своим вторьм входом с датчиком 6 тока якоря, блок 4 инте рирования - с тремя входами подключе первым входом к выходу блока 3 ререм ножения, и регулятор 5 возбуждения, а также задатчик 9 регулируемой инте сивности изменения скорости привода, первьй 13, второй 14 и третий 15 нелинейные блоки, последовательно соединенные датчик 11 статического момен та, блок 12 перемножения трех сигналов, соединен своим вторым входом с датчиком 6 тока якоря, и блок 10 интегрирования с тремя входами с ограничением выходного сигнала. Блок 4 интегрирования подключен своим вторым входом к выходу датчика 8 напряжения на якоре двигателя, а третий его вход связан с датчиком 7 тока возбуждения. Первый 13 и второй 14 нелинейные блоки соединены входами с датчиком 7 тока возбу5адения, а выходами включены на третий вход блока 12 перемножения и на второй вход блока 10 интегрирова ния соответственно. Третий нелинейный блок 15 соединен входом с датчиком 1 скорости, а выходом с третьим входом блока 10 интегрирования, выход которого включен на регулирующий вход KOTOpoio включен на регулирующий их.ид задатчика 9 интенсивности изменения скорости привода.. Электропривод работает следукнцйм образом. 74 Сигнал с выхода датчика скорости поступает на входы функционального преобразователя 2 и третьего нелинейного блока 15, Сигнал с датчика 7 токя возбуждения поступает на входы первого 13 и второго 14 нелинейных блоков. На выходе блока 12 перемножения формируется сигнал, пропорциональный произведению трех сигналов, поступающих с выхода датчика 1I ста тического момента, с выхода датчика 6 тока якоря и с выхода первого нелинейного блока 13, На входах интегратора 10 суммирзтатся сигналы, поступаюп ие с выходов второго 14 и третьего 15 нелинейных блоков с соответствующими коэффициентами К- и К. , а также сигнал с выхода бЛ-Ка 12 перемножения с коэффициентом . Выходной сигнал блока 10 интегрирования поступает на регулирующий вход эадат- чика 9 интенсивности и управляет изменением скорости привода в переходных процессах. Интегратор 10 для предотвращения накопления на его выходе больших сигналов в статических режимах должен быть снабжен ограничителем выходного сигнала, Блок 3 перемножения осуществляет непрерывное перемножение двух сигналов: сигнала, поступающего от датчика тока якоря 6 и сигнала, поступающего от функционального преобразователя 2. На выходе блока 3 перемножежения при этом формируется сигнал, поступающий со знаком плюс и с коэф- фициентом К на первьй вход блока 4 интегрирования. На второй его вход со знаком минус и с коэффициентом к поступает с датчика 8 сигнал, пропорциональный напряжению, приложенному к якорю двигателя, а на третий его вход со знаком минус и с коэффициентом Ко, Поступает сигнал, пропорциональный току возбуждения от дат- чика 7. В предлагаемом электроприводе ри соответствующем выборе коэффицинтов К, К и К поддерживаются оотношения между током в якорной епи и потоком возбуждения (кривые 18 и 19 на фиг.2), весьма близкие оптимальным (кривые 16 и 17 на х /,. иг.2), описываемым условием О), а счет введения в схему электроривода датчика 11 статического моента, первого 13, второго 14 и треьего 15 нелинейных блоков, блока 10 интегрирова1шя с ограничением выходного сигнала и регулируемого задатчика 9 интесивности в переходных процессах интенсивность изменения скорости двигателя автоматически поддерживается Такой, при которой выполняется условие (3) з,-, (3)+ ЧР.ЗьЬКб С-)о Таким образом, в предлагаемом электроприводе при соответствующем выборе коэффициентов К поддерживается минимум энергии потерь в двигателе в установивпшхся режимах в соответствии с условием С ) также и в переходных процессах за счет автоматического формирования оптималь ной диаграммы изменения скорости при одновременном выполнении условий СО иСЗ). В предлагаемом электроприводе, ка показывают расчеты,энергия потерь, выделяютдихся в переходных процессах, уменьшается на 10-20% по сравнению со случаем, когда поток возбуждения в переходных процессах не регулирует ся. Уменьшение потерь приводит к соо ветс вующему уменьшению нагрева двиг теля. Наибольший эффект может быть получен при использовании предлагаемого электропривода для механизмов с тяжелыми циклами работы. При этом может увеличиваться срок безотказной работы двигателя, а также производительность механизма на 10-20% за сче 84 8 лучшего использования приводного двигателя по нагреву. Формула изобретения Электропривод постоянного тока с минимизацией потерь в двигателе по авт.св. f 663052, отличающийся тем, что, с целью автоматического формирования оптимальной по минимуму энергии потерь диаграммы изменения скорости двигателя во времени при произвольном моменте сопротивления на его валу, в него введены задатчик регулируемой интенсивности изменения скорости двигателя, первый, второй, третий нелинейные блоки, а также последовательно соединенш,1е датчик статического момента, блтэк перемножения трех сигналов, соединенный своим вторым входом с датчиком тока якоря, и блок интегрирования с тремя входами с ограничением выходного сигнала, причем первый и второй нелинейные блоки соединены входами с датчиком тока возбуждения, а выходами включены соответственно на третий вход блока перемножения и на второй вход блока интегрирования, третий нелинейный блок соединен входом с датчиком скорости, а выходом - с третьим входом блока интегрирования, выход которого включен на регулирующий вход задатчика интенсивности. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 663052,, кл. Н 02 Р 5/06, 1977.
11
/J
II
| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод постоянного тока с минимизацией потерь в двигателе | 1977 |
|
SU758447A2 |
| Электропривод постоянного тока с минимизацией потерь в двигателе | 1982 |
|
SU1107239A2 |
| Электропривод постоянного тока с минимизацией потерь в двигателе | 1981 |
|
SU1003280A2 |
| Электропривод постоянного тока с минимизацией потерь в двигателе | 1984 |
|
SU1432705A2 |
| Устройство для управления электродвигателем с минимизацией потерь | 1980 |
|
SU892633A1 |
| Электропривод постоянного тока с минимизацией потерь в двигателе | 1977 |
|
SU663052A1 |
| Электропривод постоянного тока | 1983 |
|
SU1115188A1 |
| Электропривод постоянного тока | 1984 |
|
SU1228208A2 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПАРАМЕТРАМИ ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2414048C1 |
| Электропривод постоянного тока с подчиненным регулированием параметров | 1980 |
|
SU985914A1 |
D
a
a.8
ал
