Ю
00
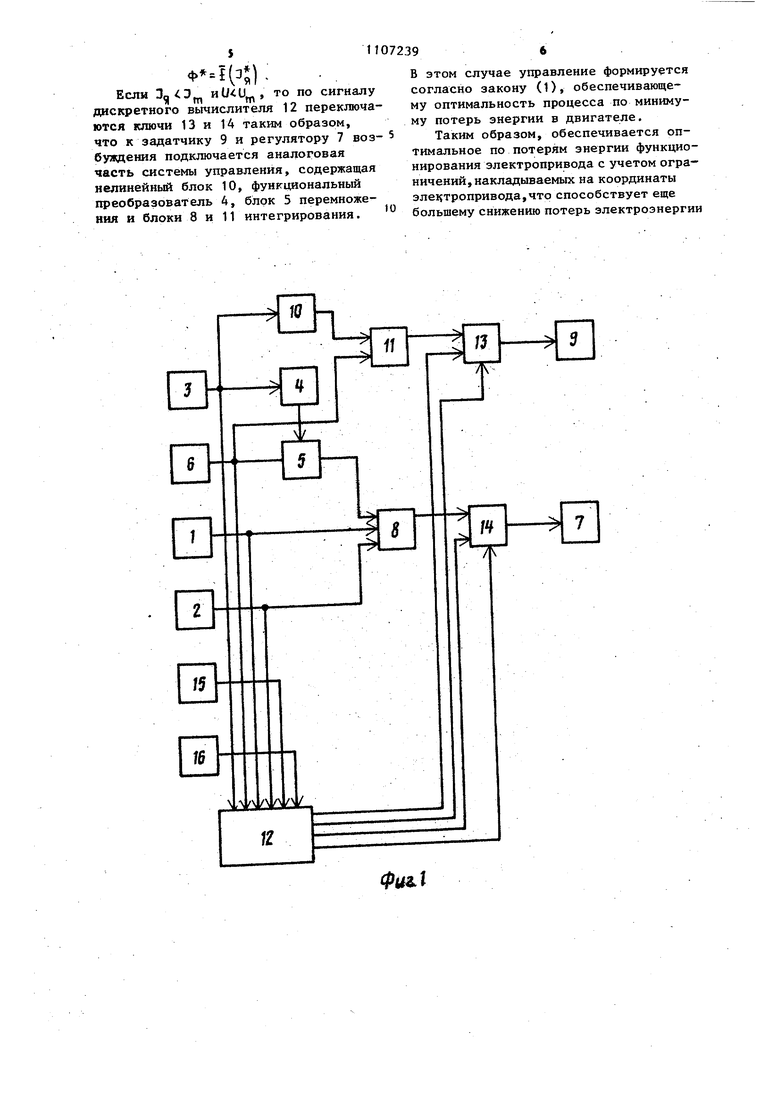
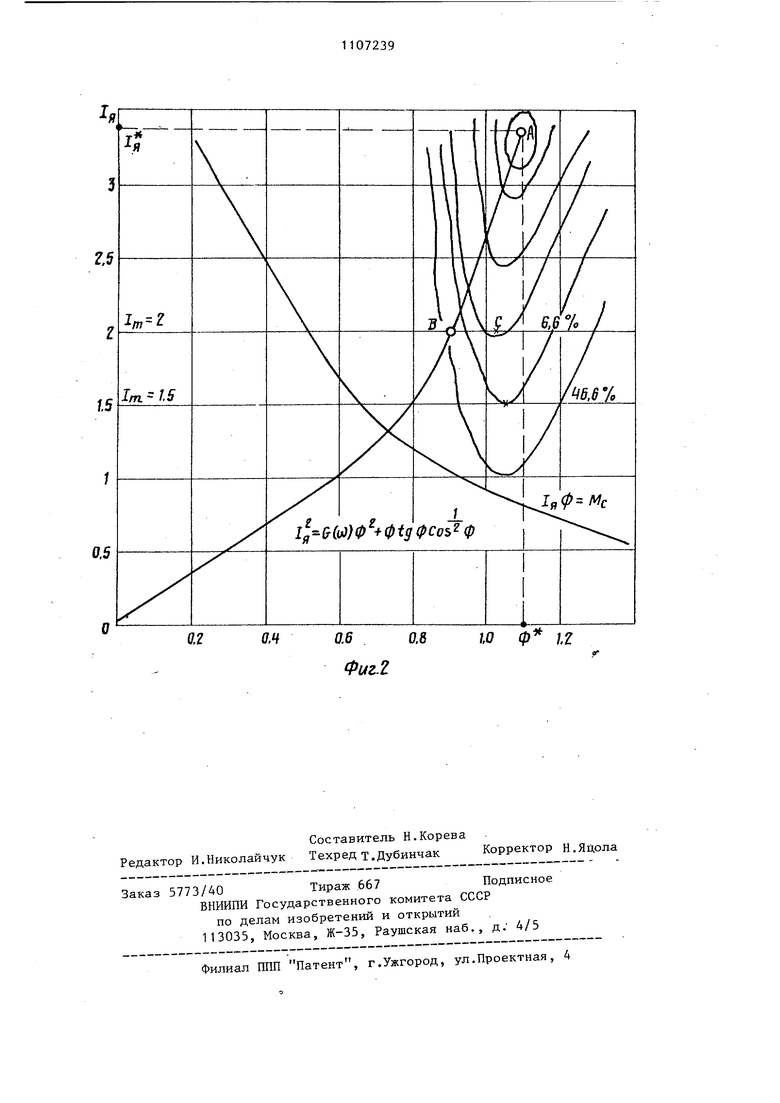
со Изобретение относится к электротехнике, в частности к области регу лируемого электропривода постоянног тока, управляемого по цепи якоря и возбуждения двигателя постоянного тока. По основному авт. св. № 758447 известен электропривод постоянного тока с минимизацией потерь в двигат ле, содержащий датчик тока возбужде НИН и напряжения на якоре, последов тельно соединенные датчик скорости, функциональный преобразователь и бл перемножения с подключенным к его второму входу датчиком тока якоря, регулятор возбуждения, к выходу рег лятора возбуждения подключен, блок И тергирования с тремя входами, которы соединены соответственно с выходом блока перемножения, выходом датчика напряжения на якоре и выходом датчика тока возбуждения, а также задатчик регулируемой интенсивности изменения скорости привода и последовательно соединенные нелинейный блок и блок интегрирования с двумя входами с ограничением выходного сигнала, причем вход нелинейного блока соединен с датчиком скорости, второй вход блока интегрирования - с. датчиком тока якоря, а выход двувходового блока интегрирования включен на регулирующий вход задатчика интенсивности П В этом электроприводе за счет поддержания оптимального соотношения между тсгком в якорной цепи и потоком возбуждения обеспечивается минимизация потерь энергии в установившихся режимах в переходных процессах, т.е приближенно выполняются условия минимума потерь в двигателе: .QMK4%|(/,R,)0, (Я где UO - угловая скорость; 1- - ток в якорной цепи двига.теля; R , - внутреннее сопротивление якорной цепи; К - конструктивный коэффициен двигателя; Ф - поток возбуждения двигате ля; G(u)) - переменный коэффициент, характеризующий зависимос потерь в стали от скорост 9 Л(Б{ш1К -ф - потери в стали двигателя; 1ц - ток возбуждения двигателя; R - сопротивление обмотки возбуждения; . ДР ,4-дР 4.j2p др / , I И А от в В полные потери в двигателе; (w) - механические потери; MQ - момент статического сопротивления на валу двигателя, Выполнение условий (1) и (2) обеспечивает достижение минимума функционала качества: . Г РТ f М 3;ф::Ж- -Г( V 71 С J UJ.W. при совместном регулировани, тока якоря и потока возбуждения двигателя и тем самым обеспечивает минимум энергии потерь,вьзделяющихся в двигат е за время процесса, без учета ограничений, накладываемых на координаты электропривода. При использовании формул (1) и (2) получают аб.солютньй минимум функции F(3r , Ф , (л)), Как п{)авило, точка абсолютного минимума лежит вне допустимой области фазовых координат. Выбор в качестве точки минимума точки пересечения какого-либо ограничения (например, по току якоря) с кривой, соответствующей уравнению (1), приводит к погрешностям и тем большим, чем дальше отстоит точка абсолютного минимума от ограничения. Целью изобретения является сниже|ние полных потерь в электроприводе за счет управления с более точным определением минимума функции потерь с учетом ограничений. Поставленная цель достигается тем, в электропривод введены дискретный вычислитель, два ключа, датчик потока возбуждения двигателя и датчик момента сопротивления двигателя, причем выходы датчиков скорости, тока якоря, тока возбуждения, напря кения на якоре двигателя, потока возбуждения и момента сопротивления соединены с входами дискретного вычислителя, два первых выхода которого связаны с двумя входами первого ключа, соединенного третьим входом с выходом двуходового блока интегрирования и выходом с входом задатчика регулируемой интенсивности изменения скорости привода, а два вторых выхода дискретного вычислителя подключень к двум входам второго ключа, соединенного третьим входом с выходом трехвходового блока интегрирования и выходом с входом регулятора возбуждения. На фиг. 1 дана структурная схема предлагаемого электропривода; на фиг. 2 - соотношения между якорным током и потоком возбуждения, где А точка абсолютного минимума. Электропривод содержит датчик 1 тока возбуждения и датчик 2 напряжения на якоре, последовательно соединенные датчик 3 скорости, функциональный преобразователь 4 и блок 5 перемножения с подключенным к его второму входу датчиком 6 тока якоря. К выходу регулятора 7 возбуждения подключен блок 8 интегрирования с тремя входами, которые соединены соответственно с выходом блока 5 перемножения , выходом датчика 2 напряжения на якоре и выходом датчика 1 ток возбуждения. Задатчик 9 регулируемой интенсивности изменения скорости при вода связан с последовательно соединенными нелинейным блоком 10 и двувходовым блоком 11 интегрирования с ограничением выходного сигнала. Вход нелинейного блока.10 соединен с датчиком 3 скорости, второй вход блока 11 интегрирования - с дат чиком 6 тока якоря, а выход блока 11 интегрирования связан с регулирующим входом задатчика 9. Электропривод содержит также дискретньй вычислитель 12, ключи 13 и 14, датчик 15 потока возбуждения и датчик 16 момен та сопротивления двигателя. . . Выходы датчика 3 скорости, датчика 6 тока якоря, датчика 1 тока возбуждения, датчика 2 напряжения на якоре, датчика 15 потока возбуждения и датчика 16 момента сопротивления соединены с входами дискретного вычислителя 12, два первых выхода кото рого связаны с двумя входами ключа 13, соединенного третьим входом с выходом блока 11 интегрирования, выходом.- с входом задатчика 9, а два вторых выхода дискретного вычислителя 12 подключены к двум входам ключа 14, соединенного третьим входом с выходом блока 8 интегрирования и выходом с входом регулятора 7 возбуж дения. В данном электроприводе при дост жении током якоря величины Jj, являю щейся предельно допустимой по условиям коммутации двигателя, управление формируется при токе якоря поток возбуждения рассчитывается з условия обеспечения ми1дамума функци йР Чл„Ф,и..() Ф-Мс aF(..Pz . . ) Учитьшая,что при раз гоне , О, получаем закон управления потоком двигате ля привыходе тока якоря на ограничение. хвйФ Нф)(„ФлНл. .Н. Электропривод работает следующим образом. Значения координат электропривода вводятся в дискретный вычислитель 12. с датчика 13 скорости, датчика 6 тока якоря, датчика 2 напряжения на якоре,датчика 1 тока возбуждения,датчика 15 потока возбуждения и датчика 16 момента сопротивления. Далее дискретный вычислитель 12 вычисляет оптимальные значения тока якоря i;; и потока возбузкдения ф двигателя по формуле (1), Затем дискретньш вычислитель 12 сравнивает Э с предельно допустимым током Jff. Если D . J и напряжение на якоре (, то полагается и оптимальное значение потока возбуждения } рассчитывается по формуле (4), куда подставляется уровнение кривой намагничивания По сигналу с выхода дискретного вычислителя 12 производится переклюЧение ключей 13 и 14 таким образом, что аналоговая часть системы отключается и управление в этом режиме производится по формуле (4). Если напряжение на якоре двигателя и больше или равно максимально допустимомуи Цд(,то ключи 13 и 14 остаются в этом же состоянии, а параметры управления рассчитываются дискретным вычислителем 12 по формулам: . ,r,jminF(3,(:j,)); (з;1: Если 3 Э , то по сигналу дискретного вычислителя 12 переключаются ключи 13 и 14 таким образом, что к задатчику 9 и регулятору 7 возбуждения подключается аналоговая часть системы управления, содержащая нелинейный блок 10, функциональный преобразователь 4, блок 5 перемножения и блоки 8 и 11 интегрирования. П 9 в этом случае управление формируется согласно закону (1), обеспечивающему оптимальность процесса по минимуму потерь энергии в двигателе. Таким образом, обеспечивается оптимальное по потерям энергии функционирования электропривода с учетом ограничений, накладываемых на координаты электропривода,что способствует еще большему снижению потерь электроэнергии
| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод постоянного тока с минимизацией потерь в двигателе | 1984 |
|
SU1432705A2 |
| Электропривод постоянного тока с минимизацией потерь в двигателе | 1981 |
|
SU1003280A2 |
| Электропривод постоянного тока с минимиза-циЕй пОТЕРь B дВигАТЕлЕ | 1977 |
|
SU847474A2 |
| Электропривод постоянного тока с минимизацией потерь в двигателе | 1977 |
|
SU758447A2 |
| Электропривод постоянного тока с минимизацией потерь в двигателе | 1977 |
|
SU663052A1 |
| Электропривод постоянного тока | 1984 |
|
SU1228208A2 |
| Устройство для управления электроприводом постоянного тока, выполненное по принципу двухзонного регулирования | 1979 |
|
SU938354A1 |
| Электропривод постоянного тока | 1983 |
|
SU1115188A1 |
| Устройство для управления электродвигателем с минимизацией потерь | 1980 |
|
SU892633A1 |
| Электропривод постоянного тока | 1977 |
|
SU692044A1 |
ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА С МИНИМИЗАЦИЕЙ ПОТЕРЬ В ДВИГАТЕЛЕ по авт. св. № 758447, отличающийся тем, что, с целью снижения полных потерь в электроприводе за счет управления с более точным определением минимума функции потерь с учетомограничений, в него введены диckpeтный вычислитель, два ключа, датчик потока возбуждения двигателя и датчик момента сопротивления двигателя, причем выходы датчиков скорости, тока якоря, тока возбуждения, напряжения на якоре двигателя, потока возбуждения и момента сопротивления соединены с входами дискретного вычислителя, два первых выхода которого связаны с двумя -входами первого ключа, соединенного третьим входом с выходом двувходового блока интегрирования и выходом с входом задатчика регулируемой интенсивности изменения скорости привода, а два вторых выхода дисгретного вы числителя подключены к двум входам второго ключа, соединенного третьим входом с выходом трехвходового блока интегрирования и выходом с входом регулятора возбуждения.
Фиг.1
0.5
QM 0.6 0.8
0.2 Фиг.г
W Ф IZ
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Электропривод постоянного тока с минимизацией потерь в двигателе | 1977 |
|
SU758447A2 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
