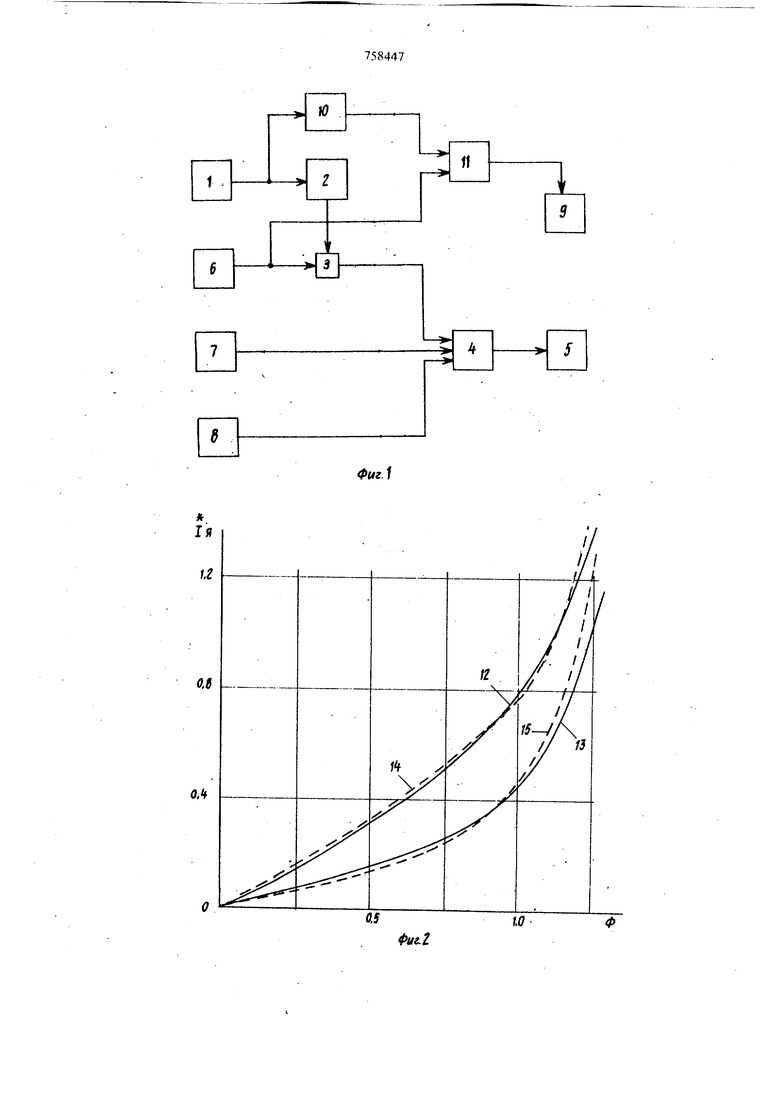
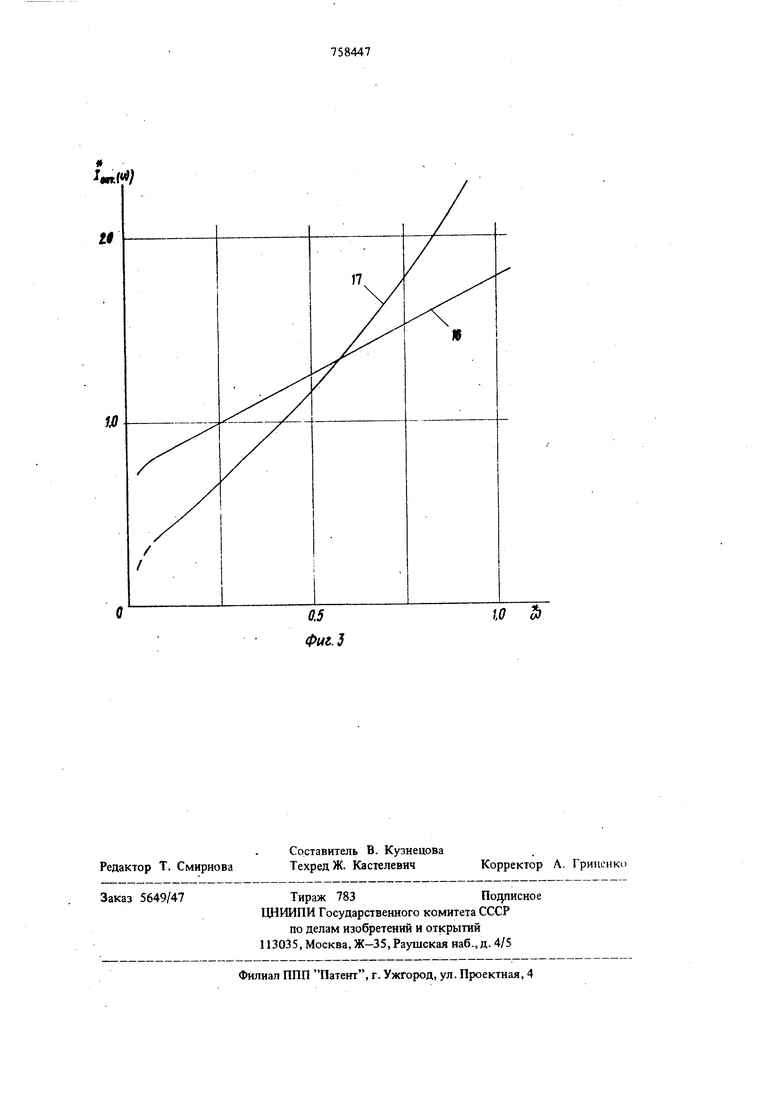
Изобретение относится к регулируемому электроприводу постоянного тока и может быть использовано в электроприводах различных машин и механизмом, например в электроприводах прокатных станов, в судовых, транспортных электроприводах, и является усовершенствованием известного электропривода, описанного в авт.св. № 663052. В основном авт.св. № 663052 описан электропривод постоянного тока, в котором за счет поддержания оптимального соотношения Между током в якорной цепи и потоком Возбуждения обеспечивается минимизация потерь энергии в установившихся режимах и в переходных процессах. Известный электропривод постоянного тока с минимизацией потерь в двигателе содержит датчики тока возбуждения и напряжения на якоре, последовательно соединенные датчик скорости, функциональный преобразователь и блок перемножения с подклю-. ченным к его второму входу датчиком тока якоря, а также регулятор возбуждения, к входу которого подключен блок интегрирования с тремя входами, которые соединены соответ|ствы вы бл те гд енно с выходом блока перемножения, с ходом Датчика напряжения на якоре и с ходом датчика тока возбуждения 1J. В этом электроприводе обеспечивается прииженное выполнение условия минимума поь в двигателе ;-I,R,,qH..(,R,VO , «) tu - угловая скорость, с; Ttj ток в якорной цепи двигателя, А; Tin внутреннее сопротивление якорной цепи двигателя, Ом; - конструктивный коэффи1шент двигателя;сО - поток возбуждения двигятеля, Вб; Q(IU|- Переменный коэффи1щент, характеризующий зависимость потерь в стали от скорости потери в стали двигателя, Вт; 1 - ток возбуждения двигателя. А; Рд - сопротивление обмотки возбуждения двигателя. Ом. 3.7 Как известно, величина энергии потерь, выделяющихся в двигателе в течение переходного про цесса изменения скорости, существенно зависит от того, по какому закону осуществляется это изменение скорости во времени. Минимум энергии потерь в двигателе за время переходного процесса достигается, если при любой скорости и любом моменте статического сопротивления М с. на валу двигателя так выбирать значения тока в якорной цепи и потока возбуждения двигателя (а значит, и момента, развиваемого двигателем), чтобы при выполнении условия (1) одновременно выполнялось следующее условие: wVt , П тгч 7 л (2. I 1 ™е ЛРцр- механические потери в двигателе, Вт; момент статического сопротивления на валу двигателя, Нм. В случае, если момент сопротивления J( является известной функцией скорости, а также известны зависимости ьР|,дрл(си) ,G(lc) и IQ(CP) уравнение (2) неявно определяет однозначную зависимость оптимального потока возбуждения , cp,, , а уравнение (1) определяет зависимость оптимального тока в якорной цепи от потока возбуждения 91опт- Яоп-гГ опт1 - 0 -Т яoпт)lЗ Зная ),aM ДРмег МДе(ф) параметры двигателя по уравнению (3) можно рассчитагь оптимальное значение тока, который должен протекать в якорной цепи двигателя в переходном процессе, как функцию скорост двигателя. В описанном выше электроприводе в переходном процессе не обеспечивается автоматический выбор тока якоря и потока возбуждения в соответствии с условием (3), а следова тельно, не обеспечивается автоматическое формирование оптимальной по минимуму энергии потерь диаграммы изменения скорости двигателя бо времени. Целью изобретения является обеспечение автоматического формирования оптимальной по минимуму энергии потерь диаграммы изме нения скорости двигателя во времени при известной зависимости момента сопротивления от скорости. Это достигается тем, что в электропривод по авт.св. № 663052, введены задатчик регули руемой интенсивности изменения скорости двигателя и последовательно соединенные нел нейный блок, предназначенный для воспроизведения гладкой монотонной функции скорости (3), и блок интегрирования с двумя ходами с ограничением ныходного сигнала, ричем вход нелинейного блока соединен с атчиком скорости, второй вход блока интегриования - с датчиком тока якоря, а выход нтегратора включен на регулирующий вход адатчика интенсивности. Такое выполнение электропривода позволяет В переходных процессах при известной зависимости момента статического сопротивления от скорости Mf (ш) формировать оптимальную по минимуму энергии потерь диаграмму изменения скорости двигателя во времени. На фиг. 1 дана структурная схема предлагаемого электропривода; на фиг. 2 представлены соотношения между якорным током и потоком возбуждения; на фиг. 3 - нелинейные функции, воспроизводимые нелинейным блоком при различных зависимостях момента сопротивления от скорости. На фиг. 1 даны следующие обозначения: 1 - датчик скорости; 2 - функциональный преобразователь; 3 - блок перемножения; 4- блок интегрирования с тремя входами; 5- регулятор возбуждения; 6 - датчик тока якоря; 7 - датчик тока возбуждения; 8 - датчик напряжения на якоре; 9 - задатчик регулируемой интенсивности изменения скорости привода; 10 - блок интегрирования с двумя входами с ограничением выходного сигнала; II - нелинейный блок. На фиг. 2 кривые 12 и 13 являются оптимальными по минимуму потерь в двигателе соотношениями между якорным током и потоком возбуждения, полученными из условия (1) при разных скоростях двигателя. Кривые 14 и 15 аппроксимируют оптимальные зависимости (кривые 12 и 13) и представляют собой соотношения между током якоря и потоком возбуждения, которые имеют место в предлагаемом электроприводе при некотором выборе коэффициентов К., К, К,. На фит. 3 кривые 16 и 17 представляют типичные функции скорости 1р(ш), воспроизводимые нелинейным блоком 11 для случаев постоянного момента сопротивления на валу М с. и вентиляторного момента соответственно, и полученных из выражения (3). Предлагаемый электропривод содержит последовательно соединенные датчик скорости I, функциональный преобразователь 2, блок перемножения 3, соединенный своим вторым входом с датчиком тока якоря 6, блок интегрирования 4 с тремя входами, подключенный первым входом к вь1ходу блока перемножения 3, и регулятор возбуждения 5, а также задатчик регулируемой интенсивности изменения скорости привода 9 и последовательно соединенные нелинейный блок 11 и блок интегри-. 5 р)вания 10 с двумя входами и с ограничением выходного сигнала. Блок интегрирования 4 подключен своим вторым входом к выходу Датчика 8 напряжения на якоре двигателя, а третий его вход связан с датчиком 7 тока возбуждения. Вход нелинейного блока И соединен с датчиком скорости 1, второй вход блока интегрирования 10 соединен с датчиком тока якоря 6, а выход блока интегрирования 10 включен на регулирующий вход задатчика интенсивности 9. Электропривод работает следующим образом. Сигнал с датчика скорости 1 поступает на вход функвдонального преобразователя 2 и нелинейного блока 11. Сигнал с выхода нелинейного блока 11 суммируется на входе интегратора 10 с сигналом, пропорциональным току якоря, и поступающим от датчика тока якоря 6. Выходной сигнал блока интегрирования 10, поступая на регулирующий вход задатчика интенсивности 9, управляет изменением скорости привода в переходных процессах. Интегратор 0 для предотвращения накоп ления на его выходе больших сигналов в статических режимах должен быть снабжен ограничителем выходного сигнала. Блок перемножения 3 осуществляет непрерывное перемножение двух сигналов - поступающего от Датчика тока якоря 6 и поступающего от функционального преобразователя 2. На выходе блока перемножения 3 формируется сигнал, поступающий со знаком плюс и с коэффициентом K/J на первый вход блока интегри рювания 4. На второй его вход со знаком минус и с коэффициентом К поступает с датчика 8 сигнал, пропорциональный напряжению, приложенному к якорю двигателя, а на третий его вход со знаком минус и с коэффициентом К поступает сигнал, гфопорциона.пьный току возбуждения от датчика 7. В предлагаемом электроприводепри соответствующем выборе коэффициентов К, К„, Kj поддерживаются соотношения между током в якорной цепи и потоком возбуждения (кривые 14 и 15) весьма близкие к оптимальным (кривые 12 и 13), описываемым условием (1 Благодаря введению в схему электропривод нелинейного блока 11, блока интегрирования 10 и регулируемого задатчика интенсивности 9 в переходных процессах интенсивности изменения скорости двигателя автоматически пощ1орживастся такой, при которой будет иметь место выполнение условия (3) -s- onTM-i y O(4) Таким образом, в предлагаемом электроприводе при соответствующем выборе коэффициентов Ki-К с поддерживается минимум энергии потерь в двигателе в установившихся режимах в соответствии с условием (1), а также и в переходных процессах за счет автоматического формирования оптимальной диаграммы изменения скорости при одновременном выполнении условий (1) и (3). В предлагаемом электроприводе, как показывают расчеты,, энергия потерь, вьщеляющихся в переходных процессах, уменьшается на 10-20% по сравнению со случаем, когда поток возбуждения в переходном процессе не. регулируется. Уменьшение потерь приводит к соответствующему уменьшению нагрева двигателя. Наибольший эффект может быть получен при использовании предлагаемого электропривода для механизмов с тяжелыми циклами работы. При этом может иметь место увеличение срока безотказной работы двигателя, а также увеличение производительности механизма на 10-20% за счет лучшего использования приводного двигателя по нагреву. Формула изобретения Электропривод постоянного тока с минимизацией потерь в двигателе по авт.св. И 663052, отличающийся тем, что, с целью автоматического формирования оптимальной по минимуму энергии потерь диаграмм ; изменения скорости двигателя во времени при известной зависимости момента статического сопротивления от скорости, в него введены задатчик регулируемой интенсивности изменения скорости двигателя и последовательно соединенные нелинейный блок и блок интегрирования с двумя входами с ограничением выходного сигнала, причем вход нелинейного блока соединен с датчиком скорости, второй вход блока интегрирования - с датчиком тока якоря, а выход блока интегрирования включен на регулирующий вход задатчика интенсивности. Источники информации, принятые во внюлаиие при экспертизе 1. Авторское свидетельство СССР № 663052, кл. И 02 Р 5/06, 1977.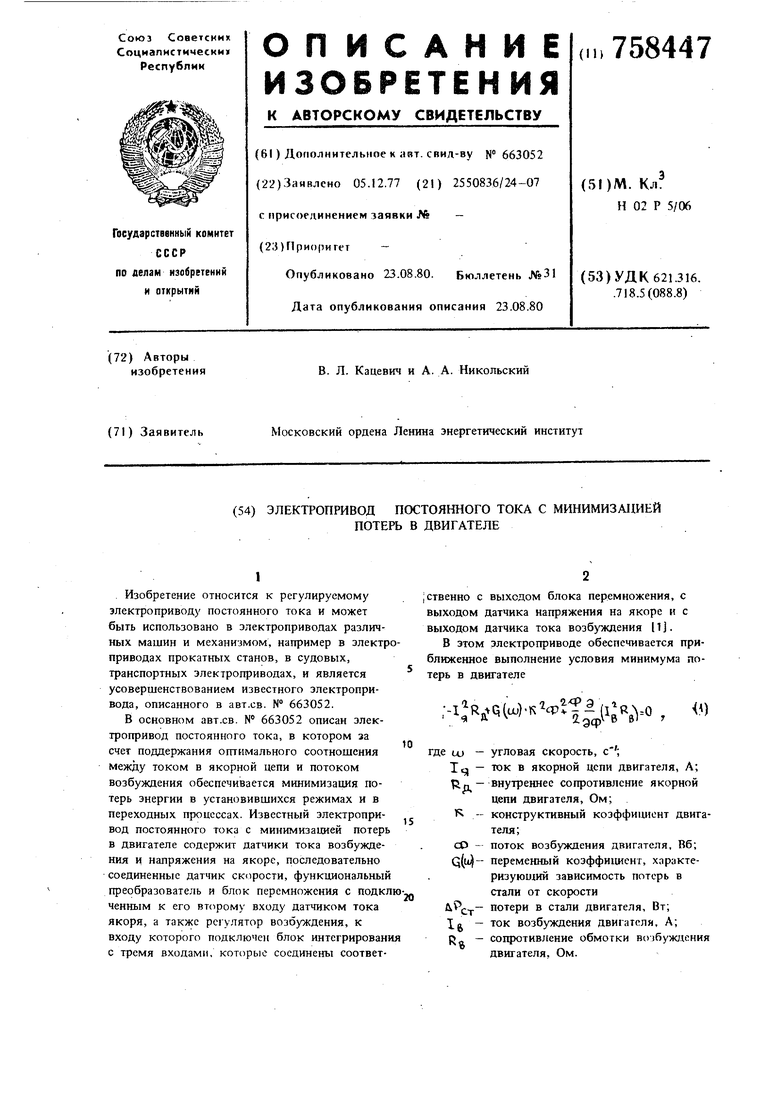
| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод постоянного тока с минимиза-циЕй пОТЕРь B дВигАТЕлЕ | 1977 |
|
SU847474A2 |
| Электропривод постоянного тока с минимизацией потерь в двигателе | 1982 |
|
SU1107239A2 |
| Электропривод постоянного тока с минимизацией потерь в двигателе | 1981 |
|
SU1003280A2 |
| Электропривод постоянного тока с минимизацией потерь в двигателе | 1984 |
|
SU1432705A2 |
| Устройство для управления электродвигателем с минимизацией потерь | 1980 |
|
SU892633A1 |
| Электропривод постоянного тока с минимизацией потерь в двигателе | 1977 |
|
SU663052A1 |
| Электропривод постоянного тока | 1984 |
|
SU1228208A2 |
| Электропривод постоянного тока | 1978 |
|
SU817953A1 |
| СИСТЕМА ЭЛЕКТРОПРИВОДА | 1993 |
|
RU2068614C1 |
| Электропривод постоянного тока | 1983 |
|
SU1115188A1 |