1
Изобретение относится к области обработки металлов давлением и может быть испо.1ьзовано при проектировании средств механизации кузнечно-штамповочного производства.
Известны руки механические, содержащие смонтированные на подвижной платформе клещи с механизмами их подъема и зажима, каждые из которых установлены в подвижном корпусе с возможностью осевого перемещения в направляющих с помощью механизма, имеющего силовой цилиндр со штоком.
Однако такие руки имеют низкую производительность.
С целью устранения указанного недостатка, механизм осевого перемещения выполнен в виде связанных со штоком силового цилиндра зубчатой передачи, на ведомом валу которой установлен кривошип и смонтированной в направляющих платформы ползушки, шарнирно соединенными с вышеупомянутым корпусом посредством рычага, со средней частью которого также шарнирно связан кривошип.
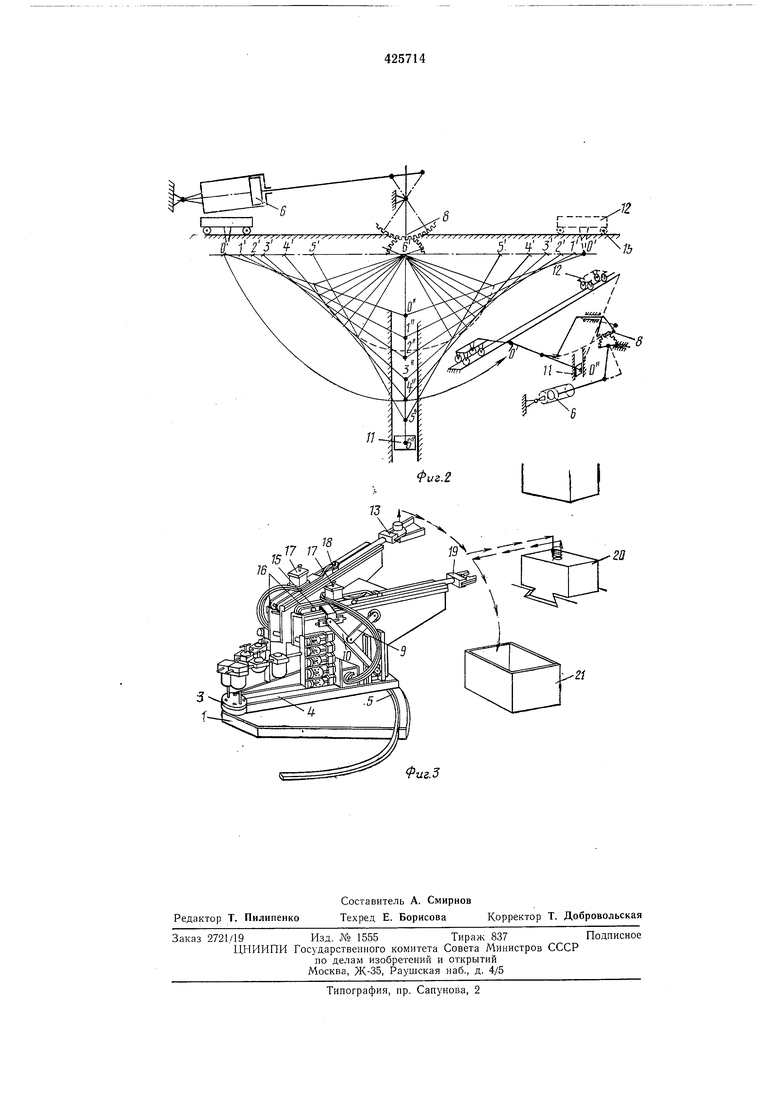
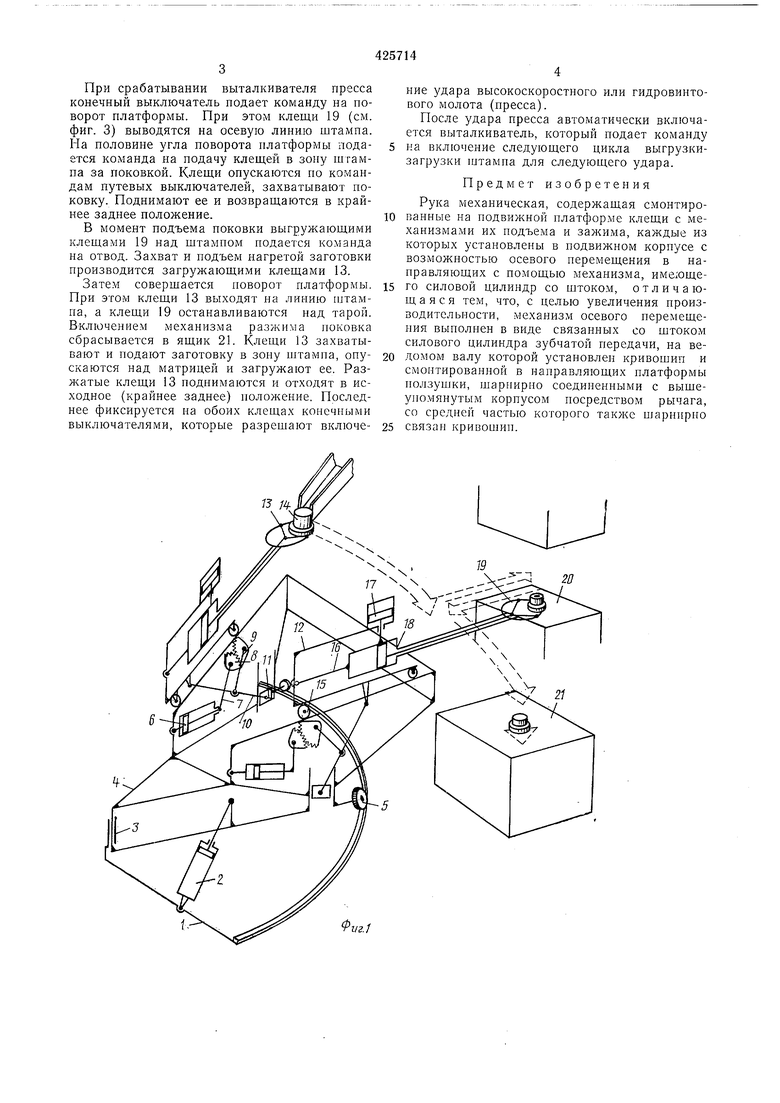
Иа фиг. 1 показана кинематическая схема руки; на фиг. 2 - кинематика и фазы движения эллипсного механизма; на фиг. 3 - механическая рука, общий вид.
Рука механическая содержит основание 1, на котором шарнирно закреплен пневмоцилиндр 2. На оси 3 основания смонтирована поворотная платформа 4, опирающаяся на
два опорных катка 5. Платформа в плане имеет форму сектора, две радиальные и две кордовые поверхности которого образуют тумбу. На ее радиальных плоскостях монтируются профильные направляющие в виде рамы. Внутри рамы смонтирован пневмоцилиндр 6, поршень которого через кривошин 7 и зубчатую передачу 8 взаимодействует с кривошипом 9. Последний шарнирно связан с плечом
10, кинематически взаимодействующим, в свою очередь, с нолзушкой 11, смонтированной в направляющих платформы 4, и тележкой 12. Одна из тележек имеет хобот с клещами 13 подачи заготовки 14 в штамп. Тележки опираются на катки 15, хобот 16 через шарнир связан с тележкой и подвешен на поршне пневмоцилиндра 17. Поршень пневмоцилиндра 18 взаимодействует с губками клещей. Клещи 19 смонтированы на другой тележке и предназначены для передачи поковки из П1тамна 20 в тару 21.
Двуклещевая механическая рука работает следующим образом.
За исходное положение клещевых захватов удобно принять положение перед нанесением удара. Клещи 13 находятся на линии штампа, выгружающие клещи 19 - над тарой. Хоботы подняты, клещи отведены в крайнее заднее
положение.
При срабатывании выталкивателя пресса конечный выключатель подает команду на поворот платформы. При этом клещи 19 (см. фиг. 3) выводятся на осевую линию штампа. На половине угла поворота платформы подается команда на подачу клещей в зону штампа за поковкой. Клещи опускаются по командам путевых выключателей, захватывают поковку. Поднимают ее и возвращаются в крайнее заднее положение.
В момент подъема поковки выгружающими клещами 19 над штампом подается команда на отвод. Захват и подъем нагретой заготовки производится загружающими клещами 13.
Затем совершается поворот платформы. При этом клещи 13 выходят на линию п.1тампа, а клещи 19 останавливаются над тарой. Включением механизма разжима поковка сбрасывается в ящик 21. Клещи 13 захватывают и подают заготовку в зону штампа, опускаются над матрицей и загружают ее. Разжатые клещи 13 поднимаются и отходят в исходное (крайнее заднее) положение. Последнее фиксируется на обоих клещах конечными выключателями, которые разрешают включение удара высокоскоростного или гидровинтового молота (нресса).
После удара пресса автоматически включается выталкиватель, который подает команду на включение следующего цикла выгрузкизагрузки штампа для следующего удара.
Предмет изобретения
Рука механическая, содержащая смонтированные на подвижной платформе клещи с механизмами их подъема и зажима, каждые из которых установлены в подвижном корпусе с возможностью осевого перемещения в нанравляющих с помощью механизма, имеющего силовой цилиндр со штоком, отличающаяся тем, что, с целью увеличения производительности, механизм осевого неремещения выполнен в виде связанных со штоком силового цилиндра зубчатой передачи, на ведомом валу которой установлен кривошип и смонтированной в направляющих платформы ползушки, шариирно соединенными с вышеупомянутым корпусом посредством рычага, со средней частью которого также шарнирно
связан кривошип. О 1 2 3 Ч- 5 . Фиг.З Ч- 32rW
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматическая линия для изготовления деталей типа топоров | 1989 |
|
SU1727945A1 |
| МЕХАНИЧЕСКАЯ РУКА | 1969 |
|
SU244849A1 |
| Автомат для горячей высадки головок болтов | 1988 |
|
SU1606250A1 |
| Механизм изменения высоты подъема хобота ковочного манипулятора | 1981 |
|
SU979012A1 |
| Установка для индукционного нагрева и подачи на последующую обработку листовых заготовок | 1984 |
|
SU1268625A1 |
| Манипулятор к ковочным вальцам | 1973 |
|
SU651885A1 |
| АВТОМАТИЧЕСКАЯ ЛИНИЯ ДЛЯ ГОРЯЧЕЙ ОБЪЕМНОЙ ШТАМПОВКИ ПРЕИМУЩЕСТВЕННО ЗВЕНЬЕВ ГУСЕНИЧНОЙ ЦЕПИ | 1992 |
|
RU2035254C1 |
| Ковочный манипулятор | 1980 |
|
SU935196A1 |
| ВЫГРУЖАЮЩЕЕ УСТРОЙСТВО МЕХАНИЧЕСКОЙ РУКИ К ВЫСОКОСКОРОСТНОМУ МОЛОТУ | 1971 |
|
SU294663A1 |
| Автоматизированная линия горячей штамповки крупных поковок с вытянутой осью | 1991 |
|
SU1822353A3 |