(54) КОВОЧНЫЙ БЕЗРЕЛЬСОВЫЙ МАНИПУЛЯТОР
| название | год | авторы | номер документа |
|---|---|---|---|
| Ковочный манипулятор | 1979 |
|
SU848138A1 |
| КОВОЧНЫЙ МАНИПУЛЯТОР | 1990 |
|
RU2010661C1 |
| Ковочный манипулятор | 1983 |
|
SU1082542A1 |
| Ковочный манипулятор | 1980 |
|
SU935196A1 |
| Подвесной ковочный манипулятор | 1979 |
|
SU977095A1 |
| Передняя подвеска хобота ковочногоМАНипуляТОРА | 1979 |
|
SU816656A1 |
| КОВОЧНЫЙ МАНИПУЛЯТОР | 1969 |
|
SU236207A1 |
| Механизм изменения высоты подъема хобота ковочного манипулятора | 1981 |
|
SU979012A1 |
| Ковочный манипулятор | 1991 |
|
SU1766569A1 |
| Клещевая головка хобота ковочного манипулятора | 1983 |
|
SU1133013A1 |
1
Изобретение относится к вспомогательному оборудованию кузнечно-прессового производства, а именно к конструкциям ковочных безрельсовых манипуляторов. ,
Известен ковочный безрельсовый манипулятор, содержащий тележку с приводом ее перемещения, размещенный на ней с возможностью относительного перемещения хобот с рычажной системой подвески, привод вертикального перемещения хобота, а привод горизонтального перемещения хобота относительно тележки, выполненный в виде силового цилиндра, связанного с хоботом посредством промежуточного элемента, и систему управления 1.
Недостатком известного ковочного манипулятора является невысокая точность перемещения его хобота из-за сложности выполнения промежуточного элемента привода горизонтального перемещения хобота, что снижает производительность работы манипулятора в целом.
Цель изобретения - повыщение производительности работы за счет повышения точности перемещения хобота.
Указанная цель достигается тем, что в ковочном безрельсовом манипуляторе, содержащем тележку с приводом ее перемещения, размещенный на ней с возможностью относительного перемещения хобот с рычажной системой подвески, привод вертикального перемещения хобота, а также привод горизонтального перемещения хобота относительно тележки, выполненный в виде силового цилиндра, связанного с хоботом посредством промежуточного элемента, и
систему управления, тележка манипулятора снабжена горизонтальными направляющими, а промежуточный элемент, связывающий хобот с силовым цилиндром привода его горизонтального перемещения, выполнен
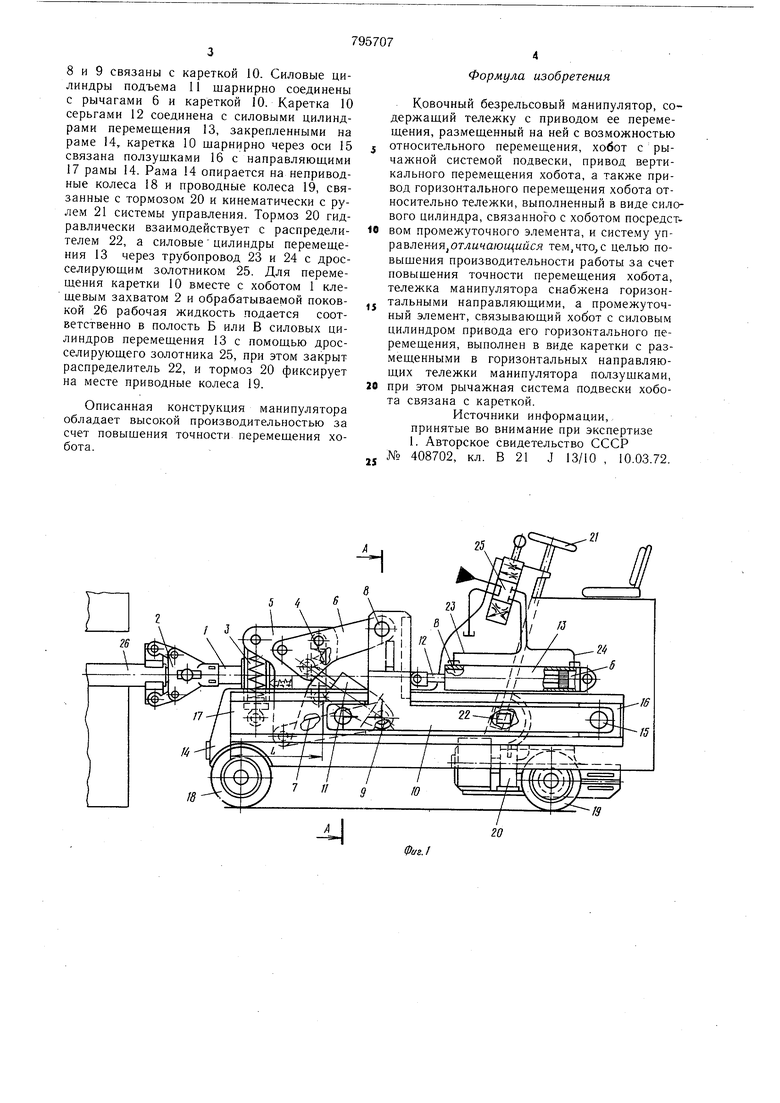
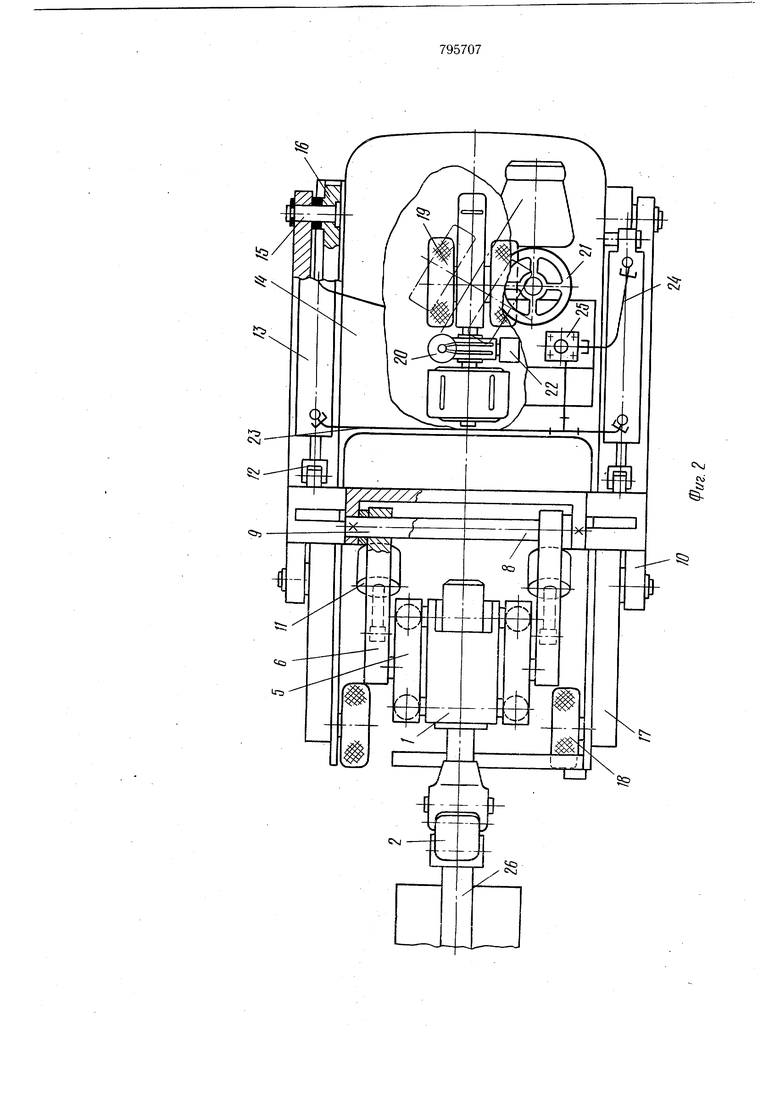
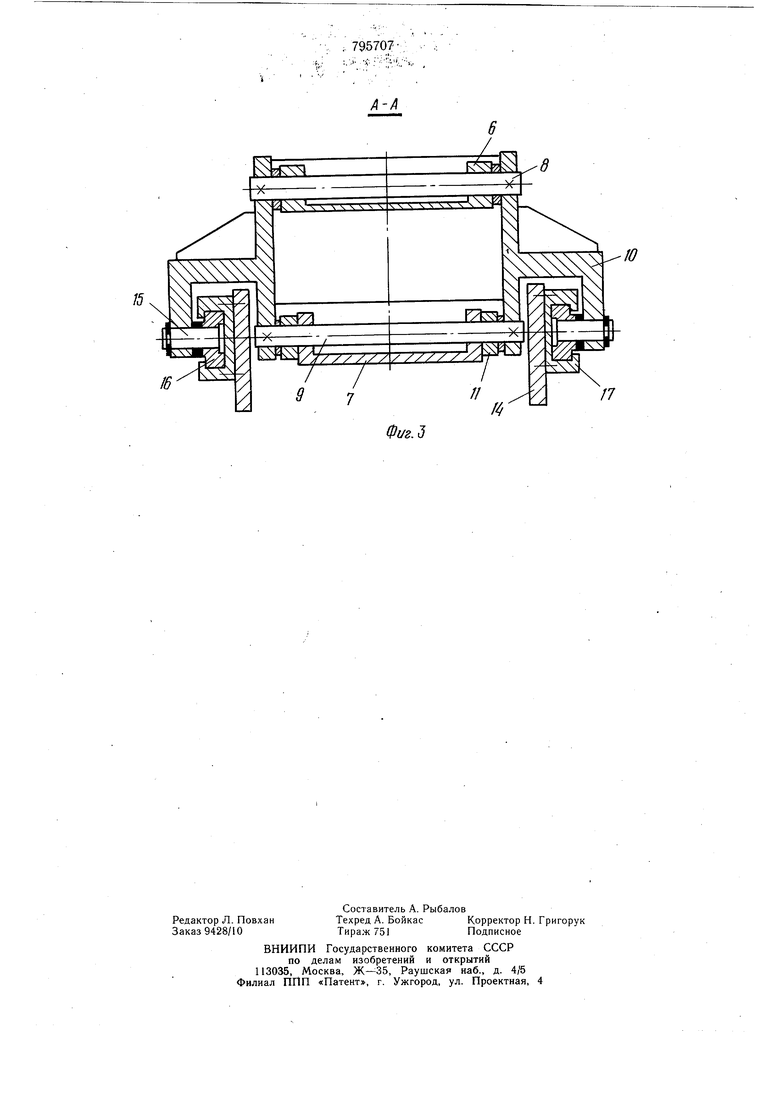
в виде каретки с размещенными в горизонтальных направляющих тележки манипулятора ползушками, при этом рычажная система подвески хобота связана с кареткой. На фиг. 1 изображен главный манипулятор; на фиг. 2 - то же, вид в плане; на
фиг. 3 - разрез А-А на фиг. 1.
Ковочный безрельсовый манипулятор содержит хобот 1 с клещевым захватом 2, амортизаторы 3 и 4, рычажную систему 5, 6 и 7. Рычаги 6 и 7 посредством щарниров
8 и 9 связаны с кареткой 10. Силовые цилиндры подъема 11 шарнирно соединены с рычагами 6 и кареткой 10. Каретка 10 серьгами 12 соединена с силовыми цилиндрами перемещения 13, закрепленными на раме 14,, каретка 10 шарнирно через оси 15 связана ползушками 16 с направляющими 17 рамы 14. Рама 14 опирается на неприводные колеса 18 и проводные колеса 19, связанные с тормозом 20 и кинематически с рулем 21 системы управления. Тормоз 20 гидравлически взаимодействует с распределителем 22, а силовые цилиндры перемещения 13 через трубопровод 23 н 24 с дросселирующим золотником 25. Для перемещения каретки 10 вместе с хоботом 1 клещевым захватом 2 и обрабатываемой поковкой 26 рабочая жидкость подается соответственно в полость Б или В силовых цилиндров перемещения 13 с помощью дросселирующего золотника 25, при этом закрыт распределитель 22, и тормоз 20 фиксирует на месте приводные колеса 19.
Описанная конструкция манипулятора обладает высокой производительностью за счет повыщения точности перемещения хобота.
Формула изобретения
Ковочный безрельсовый манипулятор, содержащий тележку с приводом ее перемещения, размещенный на ней с возможностью
относительного перемещения, хобот с рычажной системой подвески, привод вертикального перемещения хобота, а также привод горизонтального перемещения хобота относительно тележки, выполненный в виде силового цилиндра, связанного с хоботом посредством промежуточного элемента, и систему управлен- ля,отличающийся тем,что,с целью повыщения производительности работы за счет повышения точности перемещения хобота, тележка манипулятора снабжена горизонтальными направляющими, а промежуточный элемент, связывающий хобот с силовым цилиндром привода его горизонтального перемещения, выполнен в виде каретки с размещенными в горизонтальных направляющих тележки манипулятора ползушками,
при этом рычажная система подвески хобота связана с кареткой.
Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР
№ 408702, кл. В 21 J 13/10 , 10.03.72.
; . 795707
:f,;l. -f. --f-,,
/f///
I 7
9
//
/7
