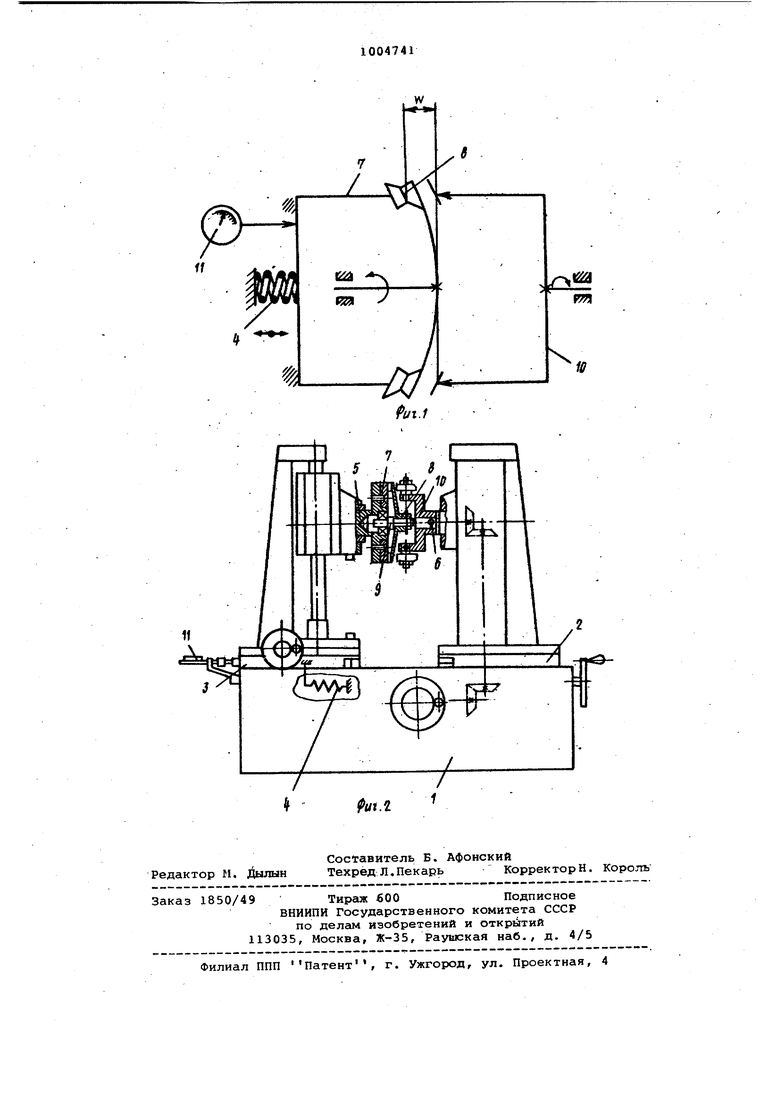
Изобретение относится к машиностроению, а именно.к контролю зубч тых колес. . . . ..... Известен способ коглплексного двух профильного контроля зубчатых колес, заключающийся в том, что производят взаимный обкат контролируемого колеса в плотном двухпрофильном зацеплеНИИ с измерительным колесом и регист рируют величину осевого смещения одного из колес 1. Недостатком способа является то, что он не позволяет осуществить контроль гибких зубчатых колес в деформированном состоянии. Наиболее близким к изобретению по технической сущности является способ комплексного двухпрофильного контроля гибких зубчатых Колес, заключающийся в том, что производят обкат контролируемой пары колес и регистри руют осевое смещение одного из колес соответствующее погрешности высоты зацепления контролируемой пары 2. Недостатком этого способа является невозможность, осуществления контроля гибких зубчатых колес в деформи рованном состоянии. Цель изобретения - повышение точности контрюля гибких зубчатых колес в деформированном состоянии. Поставленная цель достигается тем, что согласно способу коК1плексного двухпрофильного контроля гибких зубчатых колес, заключающемуся в том, что производят обкат контролируемой пары колес и регистрируют осевое или радиальное смещение одного из колес, соответствующее погрешности высоты зацепления или измерительного межосевого -расстояния контролируемой пары, гибкое колесо устанавливают соосно с жестким измерительным колесом на расстоянии, равном величине заданной осевой дефбрмации, предварительно деформируют гибкое колесо на величину заданной его осевой или радиальной деформации, имитируют обкат волновым деформированием гибкого колеса в плотном двухпрофильном зацеплении с жестким измерительным колесом и определя-. ют колебание высоты их зацепления или измерительного межосевого расстояния. На фиг. 1 показана принципиальная схема контроля; на фиг. 2 - схема устройства для осуществления способа для гибких плоских колес.
Устройство содержит основание 1, на котором размещены .установочная и измерительная каретки 2 и 3. Измерительная каретка 3 подпружинена пружиной 4. На измерительной каретке 3 установлены соосно оправки 5 и 6, на которых закреплены соответственно измерительное колесо 7 и гибкое плоское колесо 8. На установочной каретке 2 расположена оправка 9 соосно с оправками 5 и б измерительной каретки 3
На оправке 9 закреплен воянообразователь 10. На основании 1 установлен отсчетный узел 11, который чувствительным элементом контактирует с измерительной кареткой 3.
Осуществляется способ следующим образом.
На трех соосных оправках 5,6 и 9 устанавливают соответственно измерительное колесо .7,1 гибкое колесо 8 и. волнообразователь 10. Пружина 4, воздействуя на измерительную каретку. 3, осуществляет предварительное деформирование гибкого колеса 8 на величину W (фиг. 1). Поворачивая волнообразователь 10, волновым деф9рмированием контролируемого гибкого колеса 8 имитируют обкат контролируемого гибкого колеса. Регистрацию величины Смещения и колебания измерительной каретки 3 при имитации обката производят отсчетным узлом 11. Эта величина смещения характеризует комплекс ую двухпрофильную погрешность (колебание высоты зацепления) контролируемого колеса.
При контроле гибких цилиндрических зубчатых колес осуществляют предварительное деформирование гибкого колеса на величину заданной радиальной деформации. Поворачивая волнообразователь, волновым деформированием контролируемого гибкого колеса имитируют обкат контролируемого колеса. Регистрацию величины смещения и колебания измерительной каретки при имитации обката производят отсчетным
узлом. Эта величина смещения характеризует комплексную двухпрофильную погрешность (колебание измерительного межосевого расстояния) контролируемого колеса.
Воспроизведение обката измеряемой пары волновым деформированием контролируемого колеса позволяет осуществить двухпрофильный контроль гибких зубчатых колес в деформированном состоянии.
Формула изобретения
Способ комплексного двухпрофильного контроля гибких зубчатых колес, заключающийся в том, что производят обкат контролируемой пары колес и регистрируют осевое или радиальное смещение одного из колес,соответствующе е погр ности высоты зацепления или измерительного межосевого расстояния контролируемой пары/ отличающийся тем, что, с целью повышения точности контроля гибких зубчатых колес в деформированном состоянии, гибкое колесо устанавливают соосно с жестким измерительным колесом, предварительно деформируют гибкое колесо на величину заданной его осевой или радиальной деформации, имитируют обкат волновьм деформированием гибкого колеса в плотном двухпрофильном зацеплении с жестким измерительным колесом и определяют колебание высоты их зацепления или измерительного межосевого расстояния
Источники информации, принятые во внимание при экспертизе
1.Калашников С.Н. ,1Калатников А,С (Контроль производства конических зуб.чатых колес. М., Машиностроение,
1976, с. 120.
2.Райхман Р.Н. Комплексный метод контроля муфт с торцевыми зубьями. Металлорежущий и контрольно-и-змерительный инструмент. Научно7)технический реферативный сборник, вып. 6. НИИмаш, М., 1969, с. 21-23.